A Rapid Terrestrial Laser Scanning Method for Coastal Erosion Studies: A Case Study at Freeport, Texas, USA

Abstract
:1. Introduction
2. Materials and Methods
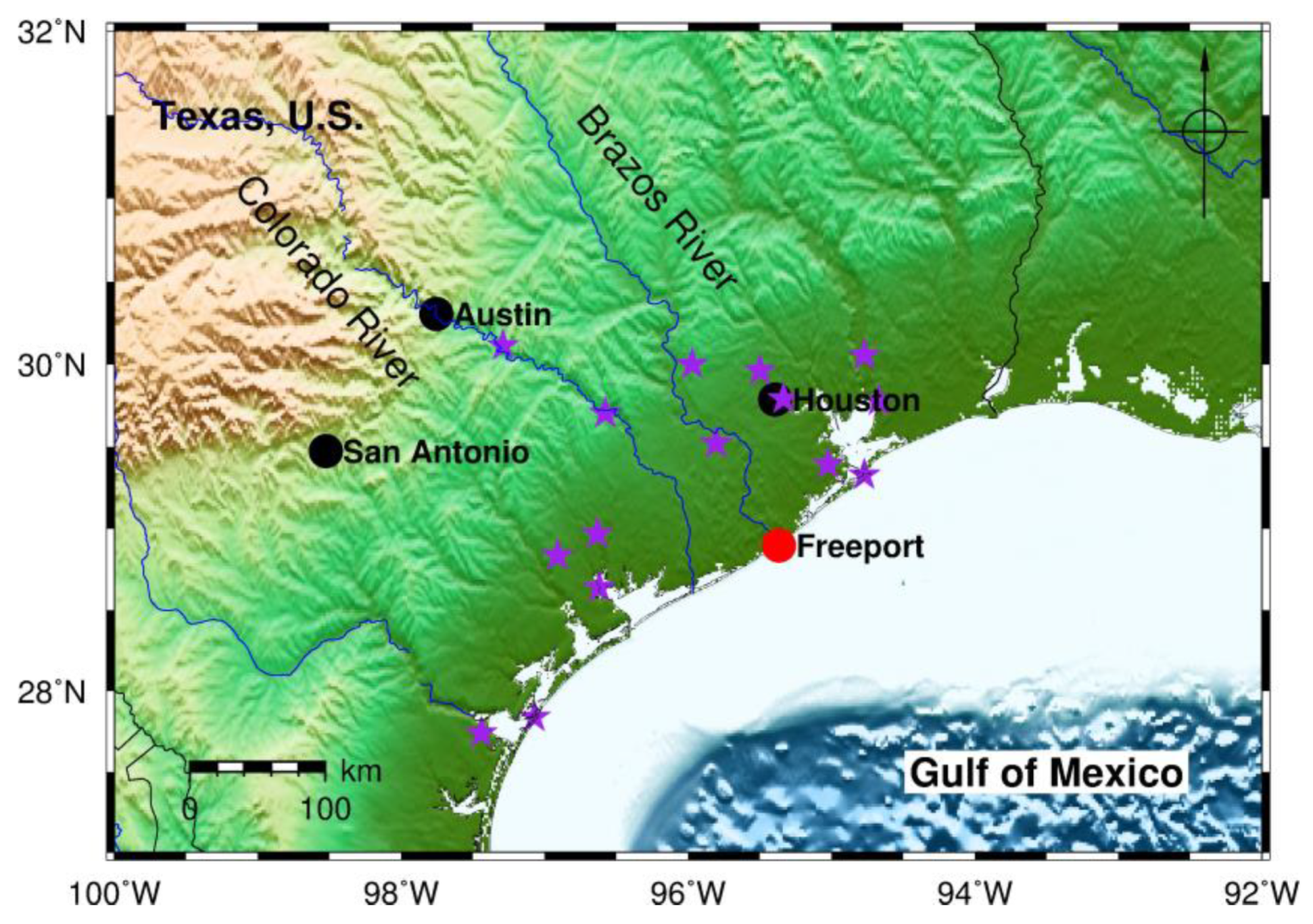
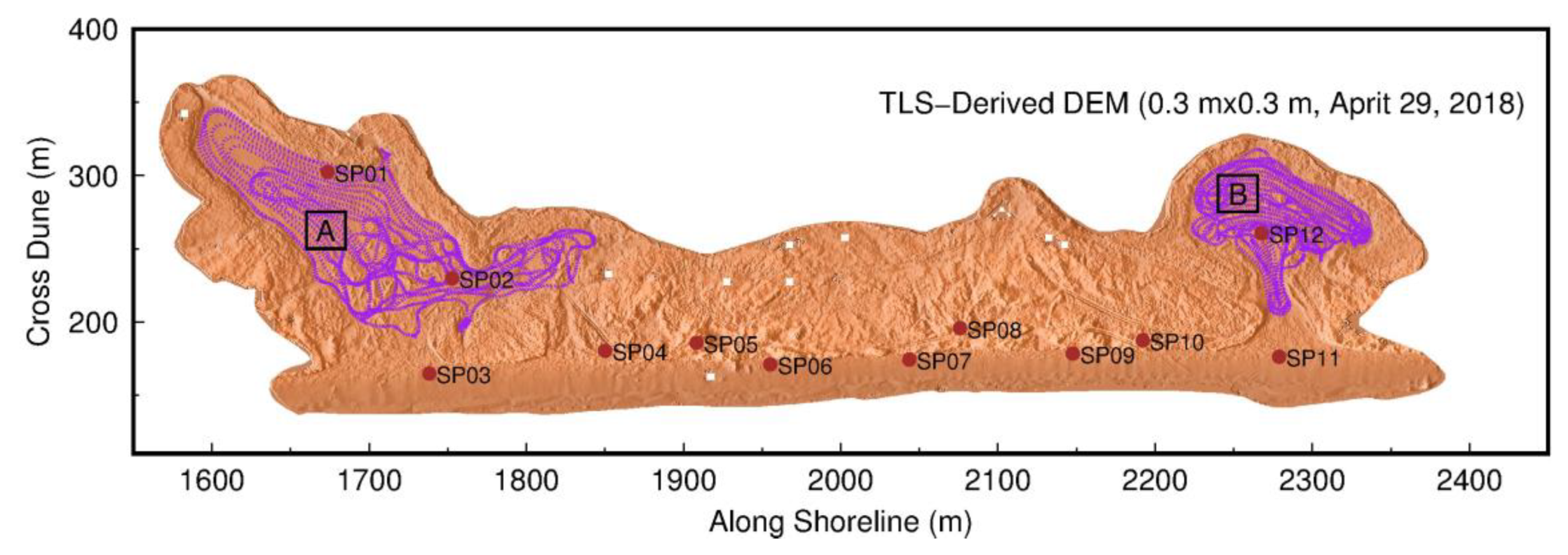
2.1. Study Area
2.2. Accuracy of TLS Range Measurements
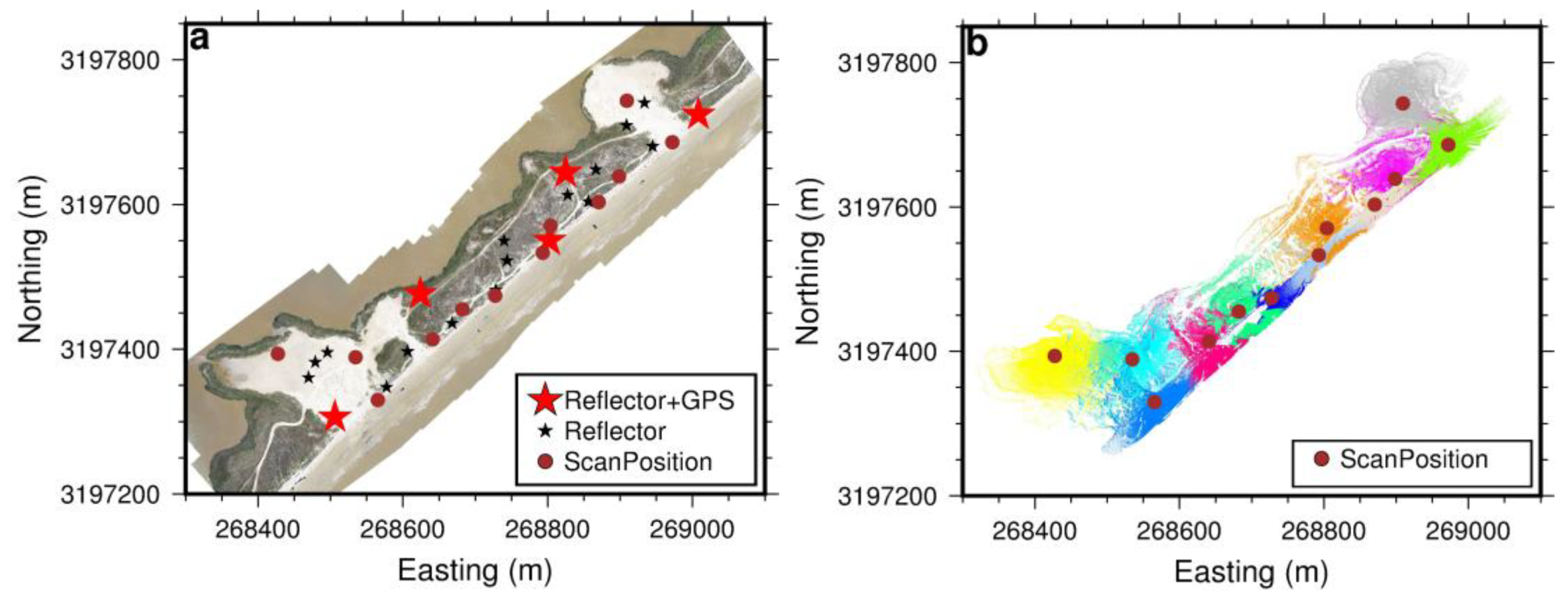
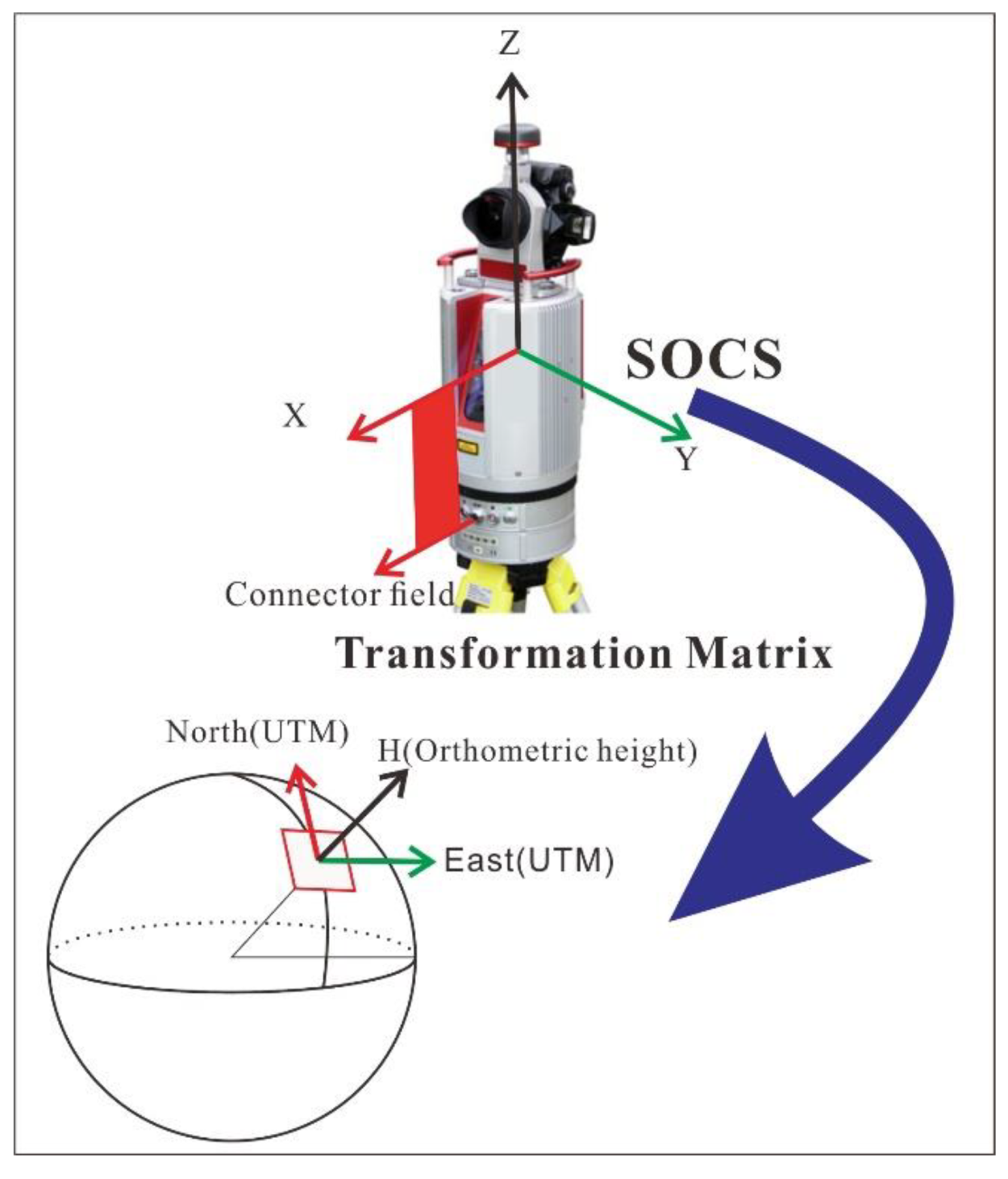
2.3. Georeferencing Method
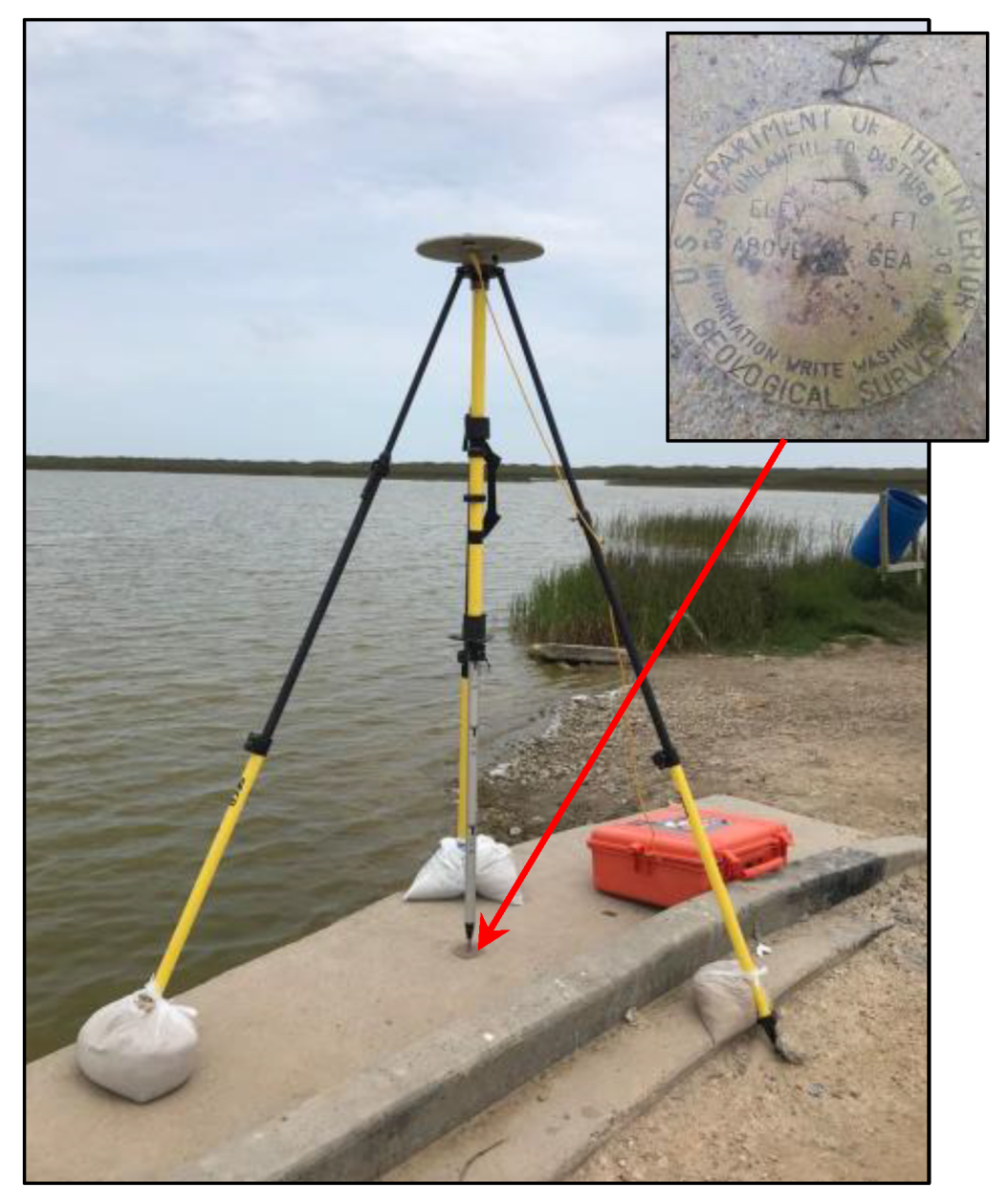
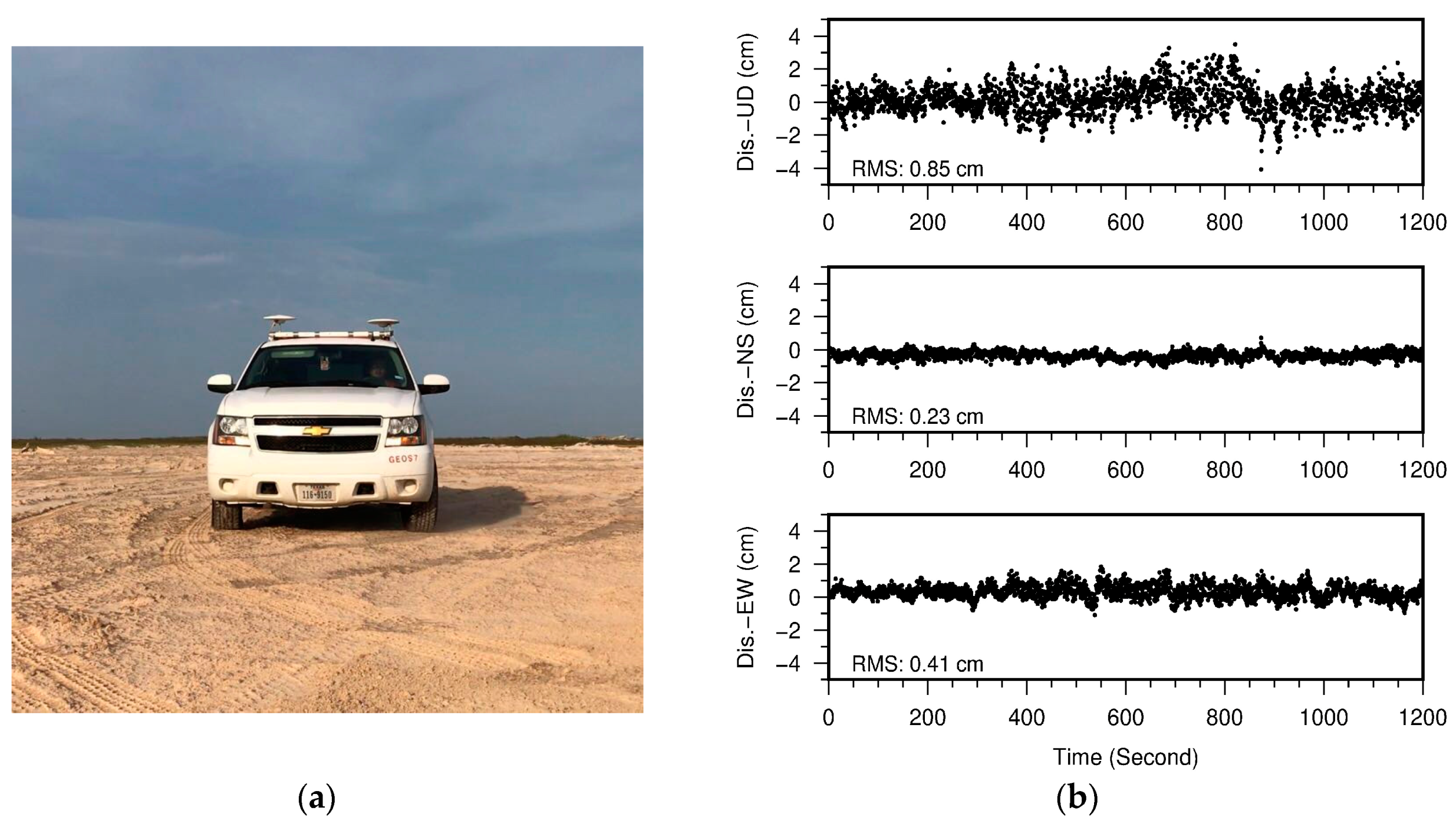
2.4. GPS Data Processing Method
3. Results
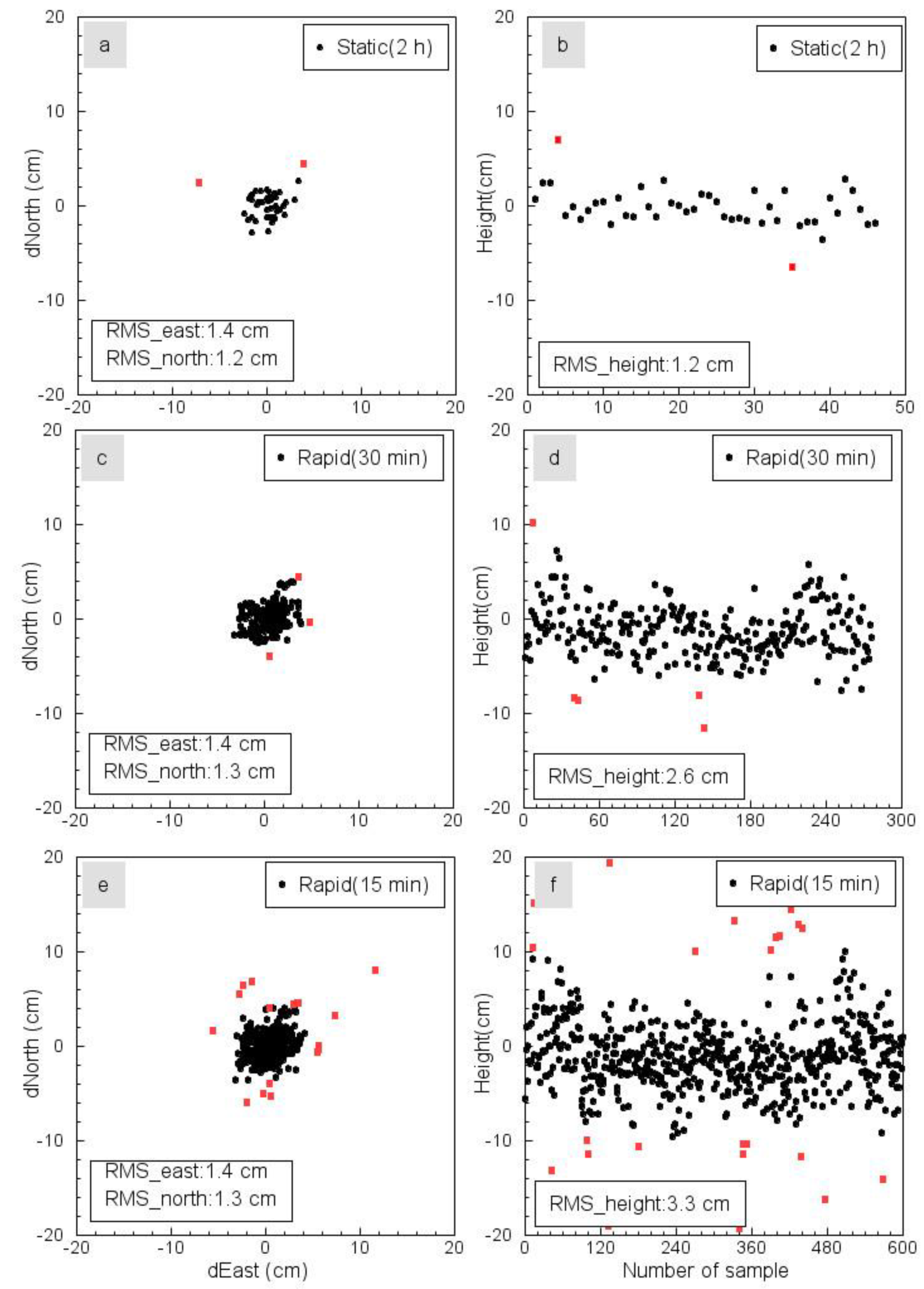
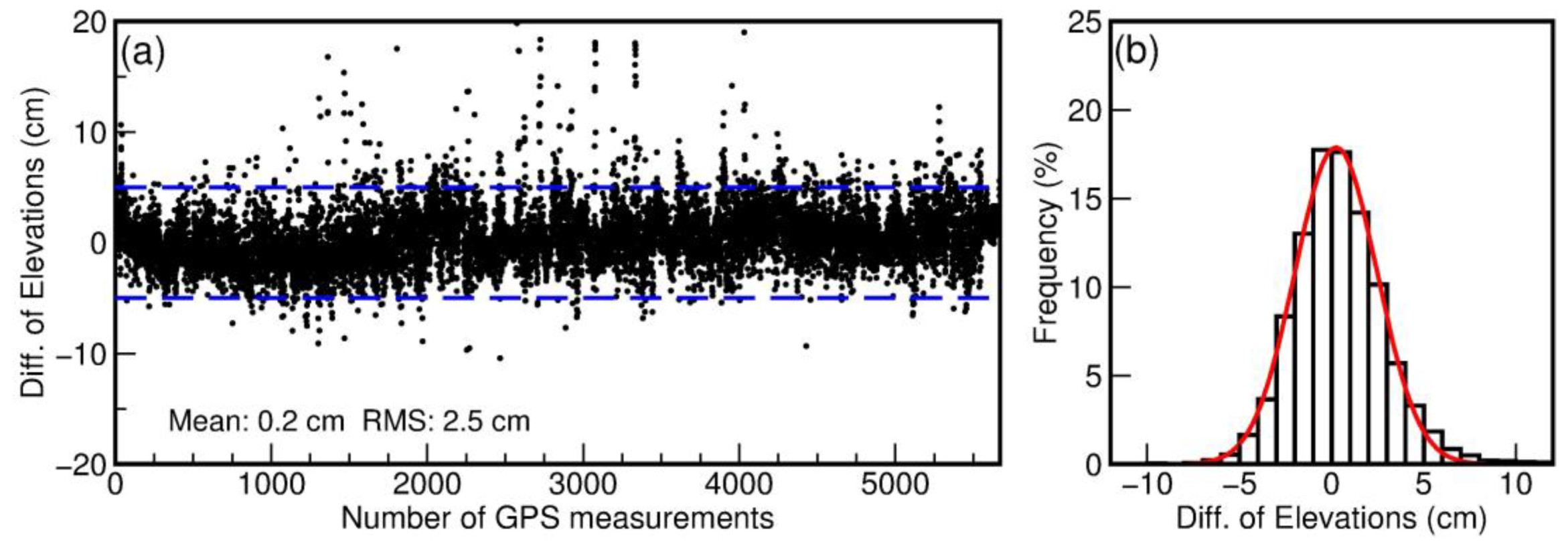
3.1. Accuracy of OPUS-RS
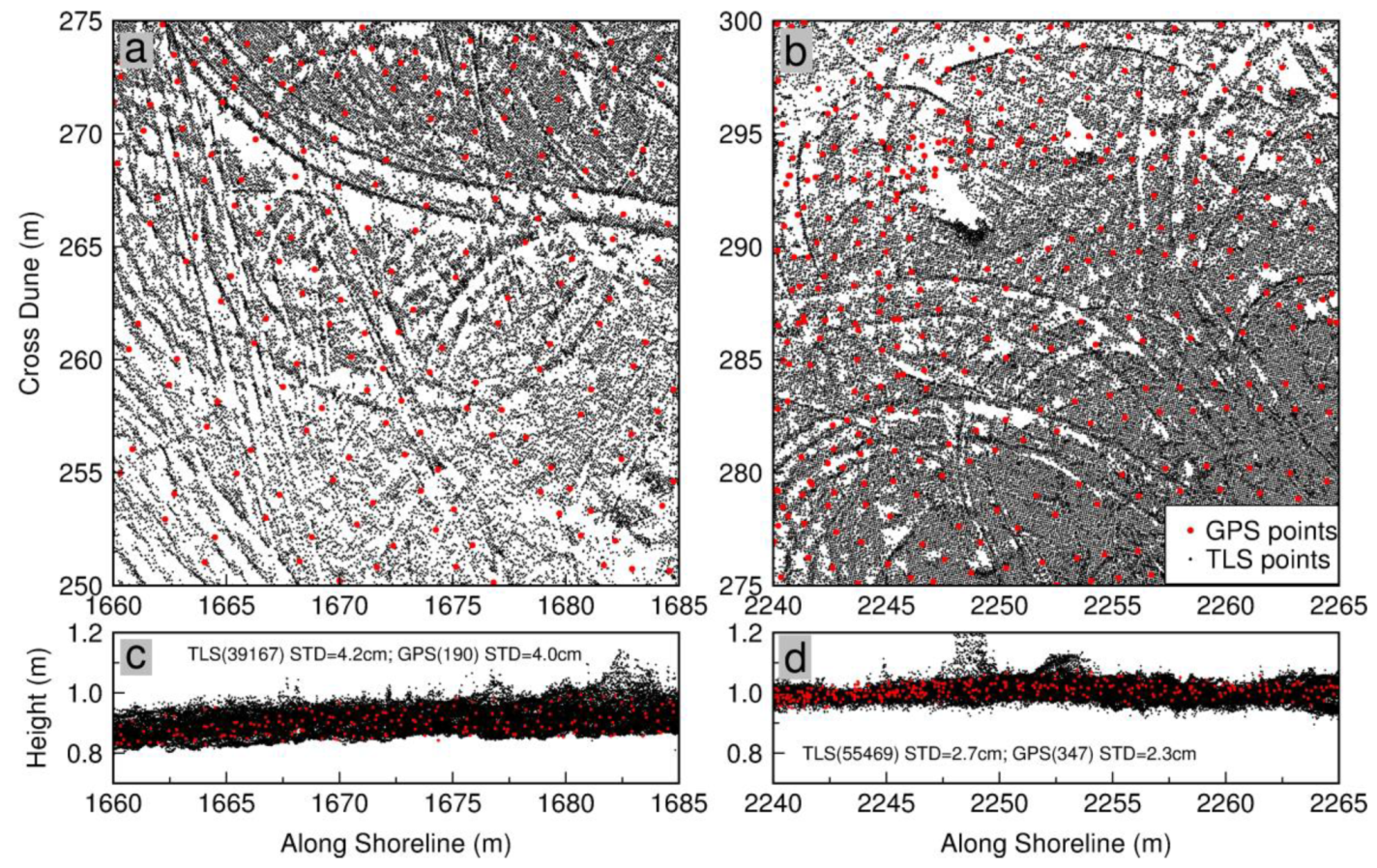
3.2. Accuracy of Georeferenced TLS Points
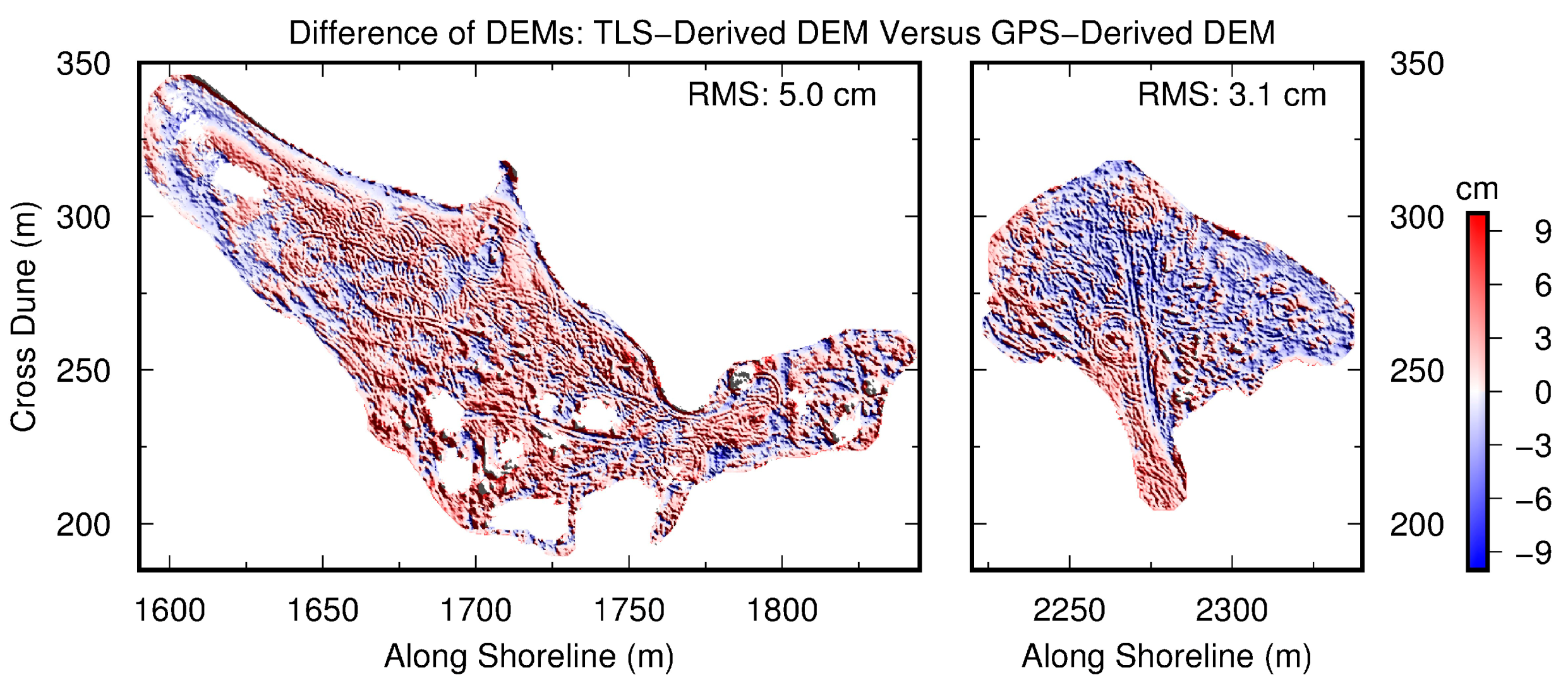
3.3. Accuracy of TLS-Derived DEMs
3.4. Rapid Versus Conventional TLS Surveys
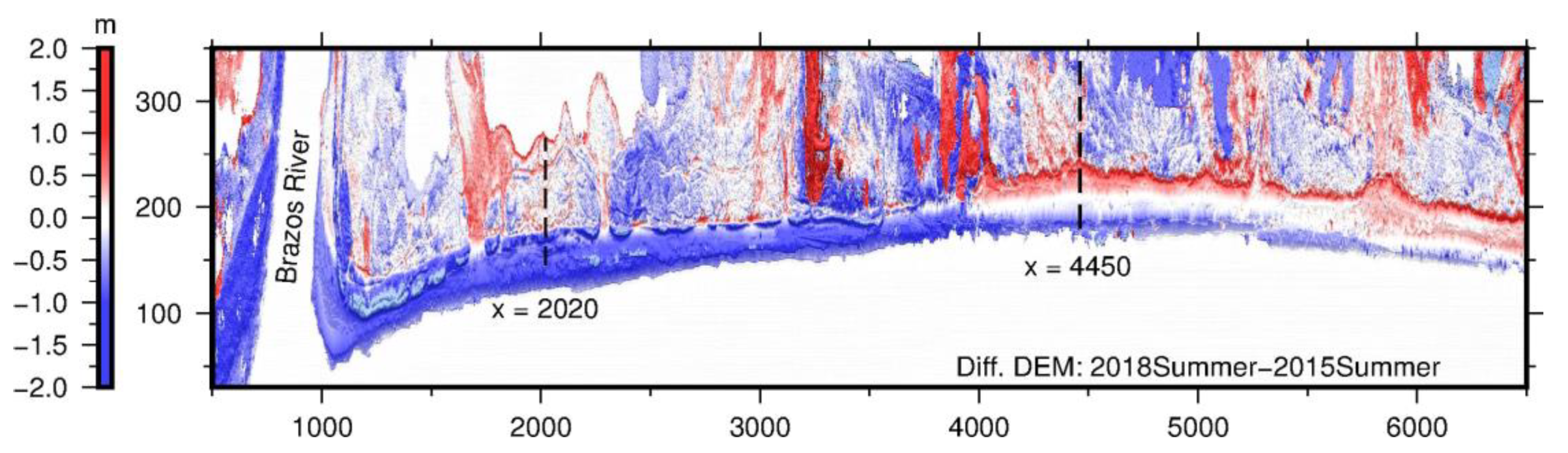
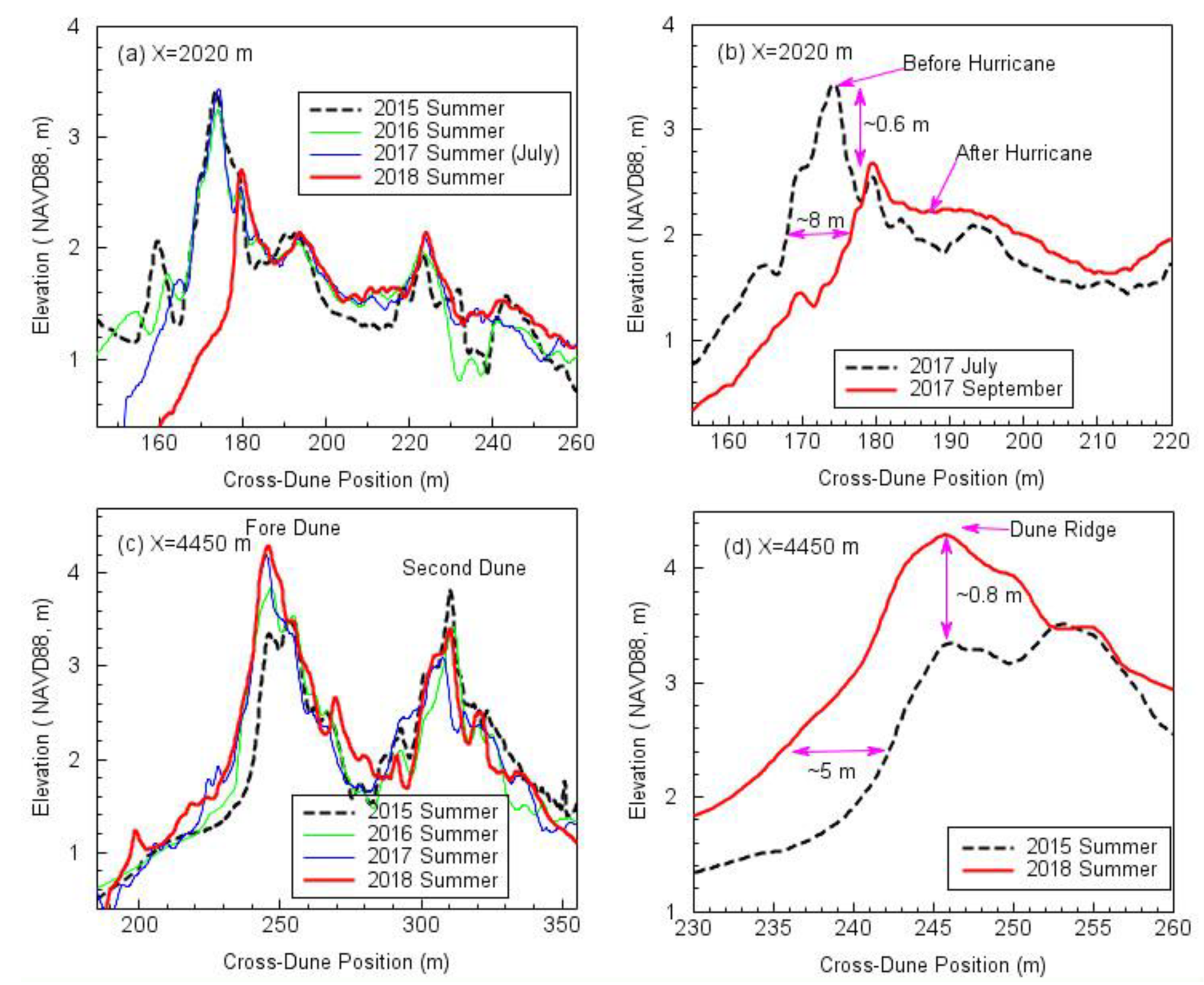
3.5. TLS-Derived Topographic Changes
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kasperski, J.; Delacourt, C.; Allemand, P.; Potherat, P.; Jaud, M.; Varrel, E. Application of a terrestrial laser scanner (TLS) to the study of the Séchilienne Landslide (Isère, France). Remote Sens. 2010, 2, 2785–2802. [Google Scholar] [CrossRef]
- Wang, G.; Philips, D.; Joyce, J.; Rivera, F. The integration of TLS and continuous GPS to study landslide deformation: A case study in Puerto Rico. J. Geod. Sci. 2011, 1, 25–34. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Ghuffar, S.; Székely, B.; Roncat, A.; Pfeifer, N. Landslide displacement monitoring using 3D range flow on airborne and terrestrial LiDAR data. Remote Sens. 2013, 5, 2720–2745. [Google Scholar] [CrossRef]
- Leshchinsky, B.A.; Olsen, M.J.; Bunn, M.D. Enhancing Landslide Inventorying, Lidar Hazard Assessment and Asset Management; No. FHWA-OR-RD-18-18; Oregon Dept. of Transportation: Salem, OR, USA, 2018.
- Micheletti, N.; Tonini, M.; Lane, S.N. Geomorphological activity at a rock glacier front detected with a 3D density-based clustering algorithm. Geomorphology 2017, 278, 287–297. [Google Scholar] [CrossRef]
- Telling, J.W.; Glennie, C.; Fountain, A.G.; Finnegan, D.C. Analyzing glacier surface motion using LiDAR data. Remote Sens. 2017, 9, 283. [Google Scholar] [CrossRef]
- Kenner, R.; Phillips, M.; Limpach, P.; Beutel, J.; Hiller, M. Monitoring mass movements using georeferenced time-lapse photography: Ritigraben rock glacier, western Swiss Alps. Cold Reg. Sci. Technol. 2018, 145, 127–134. [Google Scholar] [CrossRef]
- Levy, J.S.; Fountain, A.G.; Obryk, M.K.; Telling, J.; Glennie, C.; Pettersson, R.; Gooseff, M.; Van Horn, D.J. Decadal topographic change in the McMurdo Dry Valleys of Antarctica: Thermokarst subsidence, glacier thinning, and transfer of water storage from the cryosphere to the hydrosphere. Geomorphology 2018, 323, 80–97. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; He, H.; Shi, F.; Gao, X.; Xu, C. Topographic characteristics of rupture surface associated with the 12 May 2008 Wenchuan earthquake. Bull. Seismol. Soc. Am. 2010, 100, 2669–2680. [Google Scholar] [CrossRef]
- Kayen, R.E.; Gori, S.; Lingwall, B.; Galadini, F.; Falcucci, E.; Franke, K.; Stewart, J.P.; Zimmaro, P. Mt. Vettore fault zone rupture: LIDAR-and UAS-based structure-from-motion computational imaging. UCLA 2018. Available online: https://escholarship.org/uc/item/183128x1 (accessed on 20 July 2019).
- Ge, Y.; Tang, H.; Gong, X.; Zhao, B.; Lu, Y.; Chen, Y.; Lin, Z.; Chen, H.; Qiu, Y. Deformation monitoring of earth fissure hazards using terrestrial laser scanning. Sensors 2019, 19, 1463. [Google Scholar] [CrossRef]
- Fabbri, S.; Giambastiani, B.M.; Sistilli, F.; Scarelli, F.; Gabbianelli, G. Geomorphological analysis and classification of foredune ridges based on Terrestrial Laser Scanning (TLS) technology. Geomorphology 2017, 295, 436–451. [Google Scholar] [CrossRef]
- Medjkane, M.; Maquaire, O.; Costa, S.; Roulland, T.; Letortu, P.; Fauchard, C.; Antoine, R.; Davidson, R. High-resolution monitoring of complex coastal morphology changes: Cross-efficiency of SfM and TLS-based survey (Vaches-Noires cliffs, Normandy, France). Landslides 2018, 15, 1097–1108. [Google Scholar] [CrossRef]
- Westoby, M.J.; Lim, M.; Hogg, M.; Pound, M.J.; Dunlop, L.; Woodward, J. Cost-effective erosion monitoring of coastal cliffs. Coast. Eng. J. 2018, 138, 152–164. [Google Scholar] [CrossRef]
- Paine, J.G.; Caudle, T.L.; Andrews, J. Shoreline Movement along the Texas Gulf Coast, 1930′s to 2012. University of Texas at Austin, Bureau of Economic Geology Final Report Prepared for General Land Office under Contract. 2014. Available online: http://www.beg.utexas.edu/coastal/presentations_reports/gulfShorelineUpdate_2012.pdf (accessed on 20 July 2019).
- Zhou, X.; Wang, G.; Bao, Y.; Xiong, L.; Guzman, V.; Kearns, T.J. Delineating beach and dune morphology from massive Terrestrial Laser Scanning data using Generic Mapping Tools. J. Surv. Eng. 2017, 143, 04017008. [Google Scholar] [CrossRef]
- Wang, G.; Joyce, J.; Phillips, D.; Shrestha, R.; Carter, W. Delineating and defining the boundaries of an active landslide in the rainforest of Puerto Rico using a combination of airborne and terrestrial LIDAR data. Landslides 2013, 10, 503–513. [Google Scholar] [CrossRef]
- Lichti, D.D.; Gordon, S.J. Error propagation in directly georeferenced terrestrial laser scanner point clouds for cultural heritage recording. In Proceedings of the FIG Working Week, Athens, Greece, 22–27 May 2004; pp. 22–27. [Google Scholar]
- Cuartero, A.; Armesto, J.; Rodríguez, P.G.; Arias, P. Error analysis of terrestrial laser scanning data by means of spherical statistics and 3D graphs. Sensors 2010, 10, 10128–10145. [Google Scholar] [CrossRef] [PubMed]
- Xiong, L.; Wang, G.; Wessel, P. Anti-aliasing filters for deriving high-accuracy DEMs from TLS data: A case study from Freeport, Texas. Comput. Geosci. 2017, 100, 125–134. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. The Generic Mapping Tools Technical Reference and Cookbook, Version 4.5.18. 2018. Available online: https://www.soest.hawaii.edu/gmt/gmt/pdf/GMT_Docs.pdf (accessed on 20 July 2019).
- Wang, G. GPS landslide monitoring: Single base vs. network solutions—A case study based on the Puerto Rico and Virgin Islands permanent GPS network. J. Geod. Sci. 2011, 1, 191–203. [Google Scholar] [CrossRef]
- Wang, G. Kinematics of the Cerca del Cielo, Puerto Rico landslide derived from GPS observations. Landslides 2012, 9, 117–130. [Google Scholar] [CrossRef]
- Wang, G.; Soler, T. Measuring land subsidence using GPS: Ellipsoid height versus orthometric height. J. Surv. Eng. 2014, 141, 05014004. [Google Scholar] [CrossRef]
- Soler, T.; Wang, G. Interpreting OPUS-static results accurately. J. Surv. Eng. 2016, 142, 05016003. [Google Scholar] [CrossRef]
- Wang, G.; Welch, J.; Kearns, T.J.; Yang, L.; Serna, J., Jr. Introduction to GPS geodetic infrastructure for land subsidence monitoring in Houston, Texas, USA. Proc. Int. Assoc. Hydrol. Sci. 2015, 372, 297–303. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Wang, G. GPS-derived ground deformation (2005–2014) within the Gulf of Mexico region referred to a stable Gulf of Mexico reference frame. Nat. Hazards Earth Syst. Sci. 2016, 16, 1583–1602. [Google Scholar] [CrossRef]
- Kearns, T.J.; Wang, G.; Turco, M.; Welch, J.; Tsibanos, V. Houston16: A stable geodetic reference frame for subsidence and faulting study in the Houston metropolitan area, Texas, U.S. Geod. Geodyn. 2018. [Google Scholar] [CrossRef]
- Schuhmacher, S.; Böhm, J. Georeferencing of Terrestrial Laserscanner Data for Applications in Architectural Modeling. 2005. Available online: https://elib.uni-stuttgart.de/handle/11682/3766 (accessed on 20 July 2019).
- Reshetyuk, Y. Self-Calibration and Direct Georeferencing in Terrestrial Laser Scanning. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2009. [Google Scholar]
- Jaud, M.; Letortu, P.; Augereau, E.; Le Dantec, N.; Beauverger, M.; Cuq, V.; Prunier, C.; Le Bivic, R.; Delacourt, C. Adequacy of pseudo-direct georeferencing of terrestrial laser scanning data for coastal landscape surveying against indirect georeferencing. Eur. J. Remote Sens. 2017, 50, 155–165. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of laser scanning point clouds: A review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef]
- Olsen, M.J.; Johnstone, E.; Driscoll, N.; Ashford, S.A.; Kuester, F. Terrestrial laser scanning of extended cliff sections in dynamic environments: Parameter analysis. J. Surv. Eng. 2009, 135, 161–169. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, X.; Li, L.; Wang, W. Intensity-Assisted ICP for Fast Registration of 2D-LIDAR. Sensors 2019, 19, 2124. [Google Scholar] [CrossRef]
- Wang, G.; Soler, T. Using OPUS for measuring vertical displacements in Houston, Texas. J. Surv. Eng. 2013, 139, 126–134. [Google Scholar] [CrossRef]
- Soler, T. (Ed.) CORS and OPUS for Engineers: Tools for Surveying and Mapping Applications; ISBN (print): 978-0-7844-1164-3; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2011. [Google Scholar]
- Gillins, D.T.; Kerr, D.; Weaver, B. Evaluation of the online positioning user service for processing static GPS surveys: OPUS-Projects, OPUS-S, OPUS-Net, and OPUS-RS. J. Surv. Eng. 2019, 145, 05019002. [Google Scholar] [CrossRef]
- Wang, G.; Turco, M.; Soler, T.; Kearns, T.; Welch, J. Comparisons of OPUS and PPP solutions for subsidence monitoring in the greater Houston area. J. Surv. Eng. 2017, 143, 05017005. [Google Scholar] [CrossRef]
- Eckl, M.C.; Snay, R.A.; Soler, T.; Cline, M.W.; Mader, G.L. Accuracy of GPS-derived relative positions as a function of interstation distance and observing-session duration. J. Geod. 2001, 75, 633–640. [Google Scholar] [CrossRef]
- Wang, G.; Soler, T. OPUS for horizontal subcentimeter-accuracy landslide monitoring: Case study in the Puerto Rico and Virgin Islands region. J. Surv. Eng. 2012, 138, 143–153. [Google Scholar] [CrossRef]
- Wiśniewski, B.; Bruniecki, K.; Moszyński, M. Evaluation of RTKLIB’s positioning accuracy using low-cost GNSS receiver and ASG-EUPOS. TransNav 2013, 7, 79–85. [Google Scholar] [CrossRef]
- Srinuandee, P.; Satirapod, C. Use of genetic algorithm and sliding windows for optimising ambiguity fixing rate in GPS kinematic positioning mode. Surv. Rev. 2015, 47, 1–6. [Google Scholar] [CrossRef]
- Skoglund, M.; Petig, T.; Vedder, B.; Eriksson, H.; Schiller, E.M. Static and dynamic performance evaluation of low-cost RTK GPS receivers. In Proceedings of the Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 16–19. [Google Scholar]
- Xiong, L.; Wang, G.; Bao, Y.; Zhou, X.; Sun, X.; Zhao, R. Detectability of repeated airborne laser scanning for mountain landslide monitoring. Geosciences 2018, 8, 469. [Google Scholar] [CrossRef]
- Mora, O.; Lenzano, M.; Toth, C.; Grejner-Brzezinska, D.; Fayne, J. Landslide change detection based on multi-temporal Airborne LiDAR-derived DEMs. Geosciences 2018, 8, 23. [Google Scholar] [CrossRef]
- Cao, N.; Lee, H.; Zaugg, E.; Shrestha, R.; Carter, W.; Glennie, C.; Wang, G.; Lu, Z.; Fernandez-Diaz, F.C. Airborne DInSAR results using time-domain Backprojection algorithm: A case study over the Slumgullion Landslide in Colorado with validation using Spaceborne SAR, Airborne LiDAR, and ground-based observations. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 4987–5000. [Google Scholar] [CrossRef]
- Barreiro-Fernández, L.; Buján, S.; Miranda, D.; Diéguez-Aranda, U.; González-Ferreiro, E. Accuracy assessment of LiDAR-derived digital elevation models in a rural landscape with complex terrain. J. Appl. Remote Sens. 2016, 10, 016014. [Google Scholar] [CrossRef]
- Aryal, R.R.; Latifi, H.; Heurich, M.; Hahn, M. Impact of slope, aspect, and habitat-type on LiDAR-derived digital terrain models in a near natural, heterogeneous temperate forest. PFG–J. Photogramm. Rem. 2017, 85, 243–255. [Google Scholar] [CrossRef]
- Nyquist, H. Certain topics in telegraph transmission theory. Trans. Am. Inst. Elect. Eng. 1928, 47, 617–644. [Google Scholar] [CrossRef]
- Shannon, C.E. Communication theory of secrecy systems. Bell Syst. Tech. J. 1949, 28, 656–715. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Christiansen, M.; Laursen, M.; Jørgensen, R.; Skovsen, S.; Gislum, R. Designing and testing a UAV mapping system for agricultural field surveying. Sensors 2017, 17, 2703. [Google Scholar] [CrossRef]
- Singh, K.K.; Frazier, A.E. A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scanner–Reflector Pair * | GPS-Derived Distance (m) | TLS-Derived Distance (m) | Difference of Two Distances (cm) |
|---|---|---|---|
| SP01−Ref.01 | 213.455 | 213.458 | 0.3 |
| SP02−Ref.02 | 125.198 | 125.203 | 0.5 |
| SP03−Ref.03 | 158.162 | 158.166 | 0.4 |
| SP04−Ref.04 | 211.740 | 211.747 | 0.7 |
| SP05−Ref.05 | 230.506 | 230.510 | 0.4 |
| SP06−Ref.06 | 277.745 | 277.745 | 0 |
| SP07−Ref.07 | 287.613 | 287.612 | 0.1 |
| SP08−Ref.08 | 202.968 | 202.954 | 1.4 |
| SP09−Ref.09 | 183.535 | 183.534 | 0.1 |
| SP10−Ref.10 | 139.149 | 139.146 | 0.3 |
| SP11−Ref.11 | 153.003 | 153.005 | 0.2 |
| SP12−Ref.12 | 130.221 | 130.233 | 1.2 |
| Average: 0.4 |
| Duration | 2 h | 30 min | 15 min |
|---|---|---|---|
| Submitted files | 46 | 276 | 618 |
| Aborted (failed) | 0 | 0 | 8 |
| Outliers(horizontal) | 2 | 3 | 16 |
| Outliers(vertical) | 2 | 5 | 26 |
| RMS-East (cm) | 1.2 | 1.3 | 1.4 |
| RMS-North (cm) | 1.2 | 1.2 | 1.2 |
| RMS-Height (cm) | 1.4 | 2.5 | 3.2 |
| Error Interval (cm) | Percent (%) * | Total Percent (%) | ||
|---|---|---|---|---|
| <−7.5 | 0.09 | - | - | - |
| −7.5 to −5 | 0.77 | - | - | 99.11 |
| -5 to −2.5 | 8.91 | - | 95.34 | |
| −2.5 to 0 | 35.50 | 72.81 | ||
| 0 to 2.5 | 37.31 | |||
| 2.5 to 5 | 13.62 | - | ||
| 5 to 7.5 | 3.00 | - | ||
| > 7.5 | 0.80 | - | - | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, L.; Wang, G.; Bao, Y.; Zhou, X.; Wang, K.; Liu, H.; Sun, X.; Zhao, R. A Rapid Terrestrial Laser Scanning Method for Coastal Erosion Studies: A Case Study at Freeport, Texas, USA. Sensors 2019, 19, 3252. https://doi.org/10.3390/s19153252
Xiong L, Wang G, Bao Y, Zhou X, Wang K, Liu H, Sun X, Zhao R. A Rapid Terrestrial Laser Scanning Method for Coastal Erosion Studies: A Case Study at Freeport, Texas, USA. Sensors. 2019; 19(15):3252. https://doi.org/10.3390/s19153252
Chicago/Turabian StyleXiong, Lin, Guoquan Wang, Yan Bao, Xin Zhou, Kuan Wang, Hanlin Liu, Xiaohan Sun, and Ruibin Zhao. 2019. "A Rapid Terrestrial Laser Scanning Method for Coastal Erosion Studies: A Case Study at Freeport, Texas, USA" Sensors 19, no. 15: 3252. https://doi.org/10.3390/s19153252