Surface Correlation-Based Fingerprinting Method Using LTE Signal for Localization in Urban Canyon


Abstract
1. Introduction
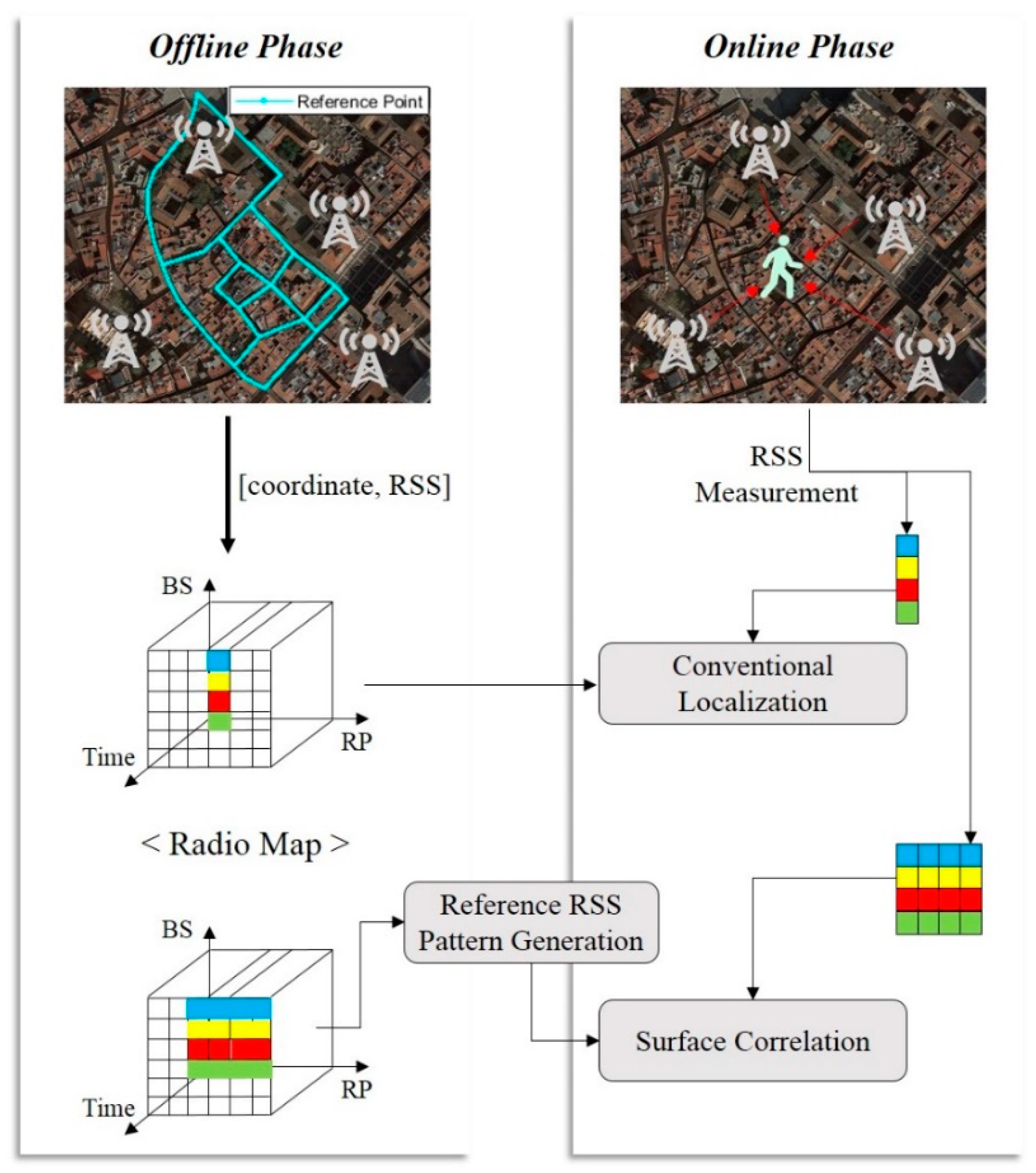
- We develop an SC-based fingerprinting technology that computes a location through comparison of spatial RSS patterns, rather than instantaneous RSS data as applied in the conventional fingerprinting method, between the database and measurements.
- For comparison between the measurements and database, we develop methods for generating spatial RSS patterns from them according to the movement of a pedestrian.
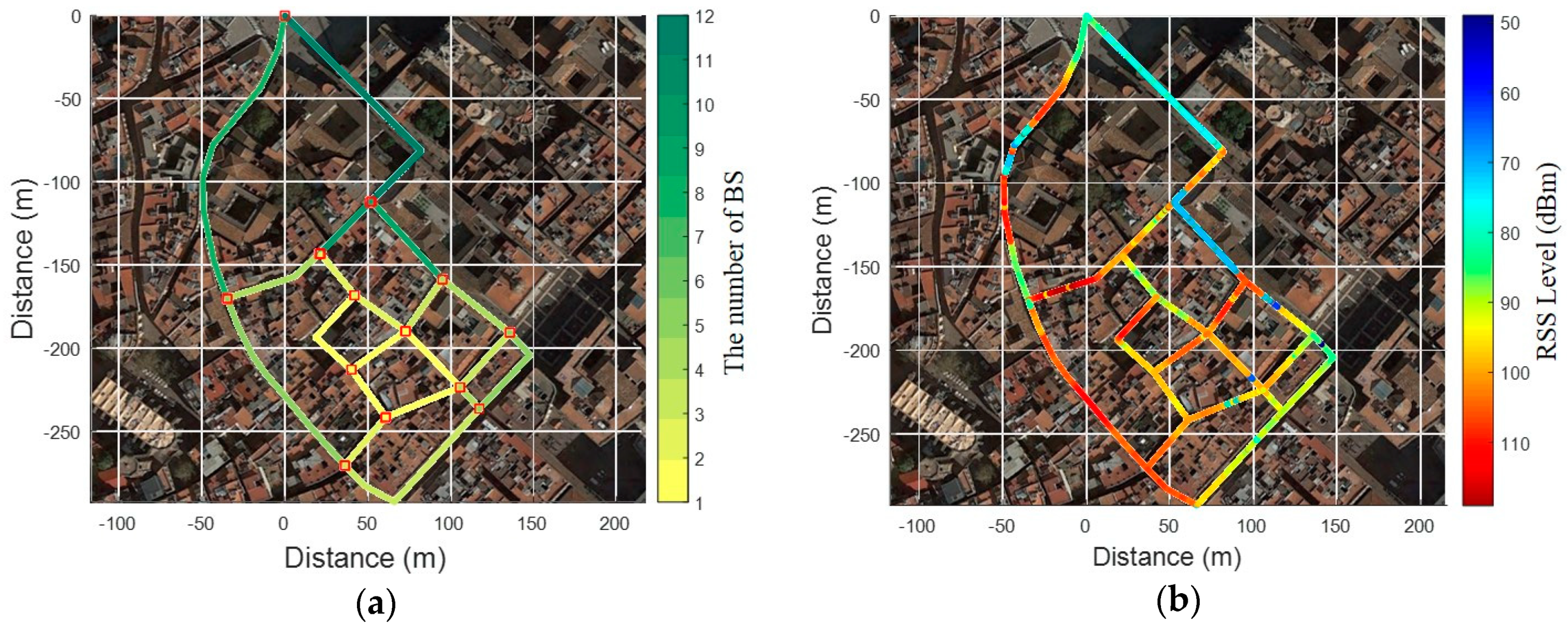
- We obtain accurate and stable location information by using few LTE base stations even in error-prone urban areas.
2. Algorithm Overview
3. Surface Correlation-based Fingerprinting Method
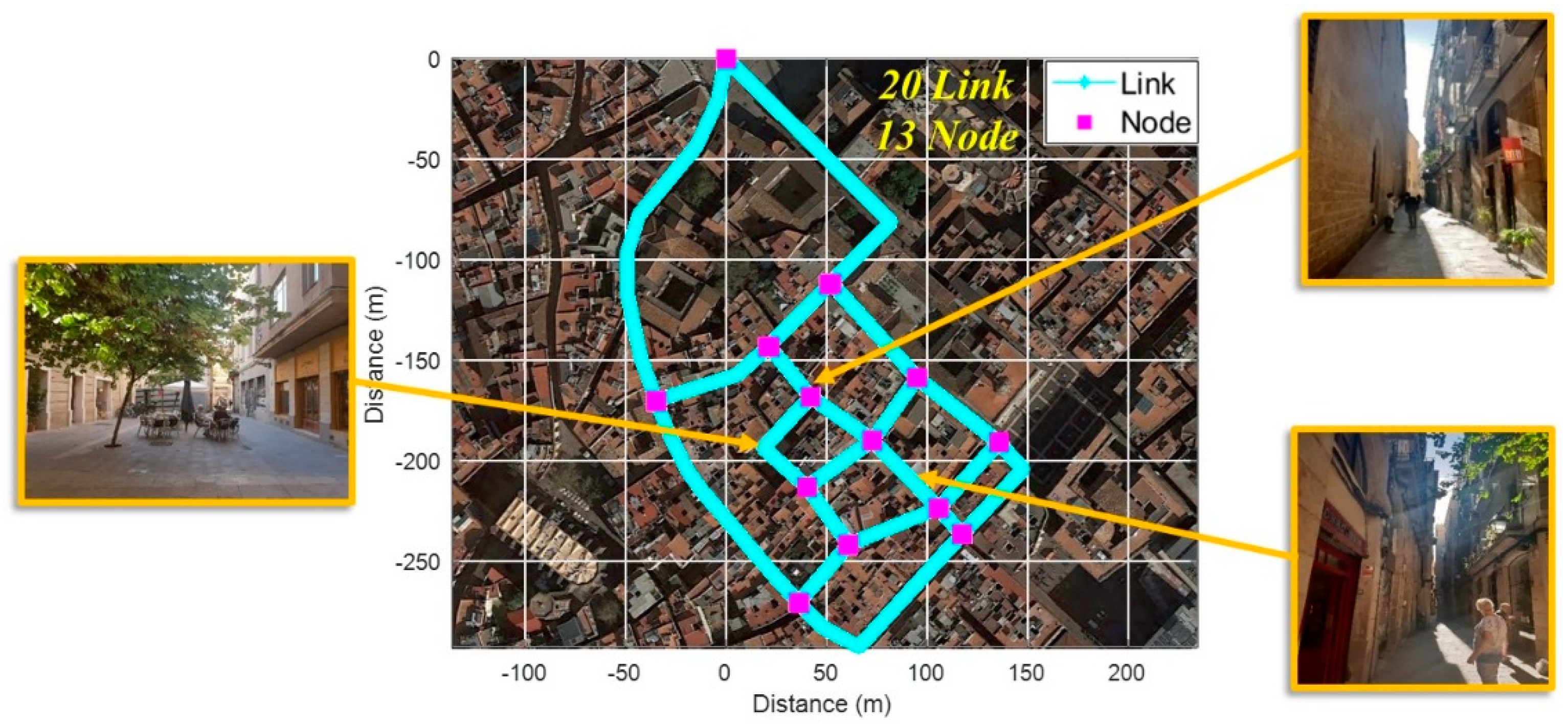
3.1. Fingerprinting Database
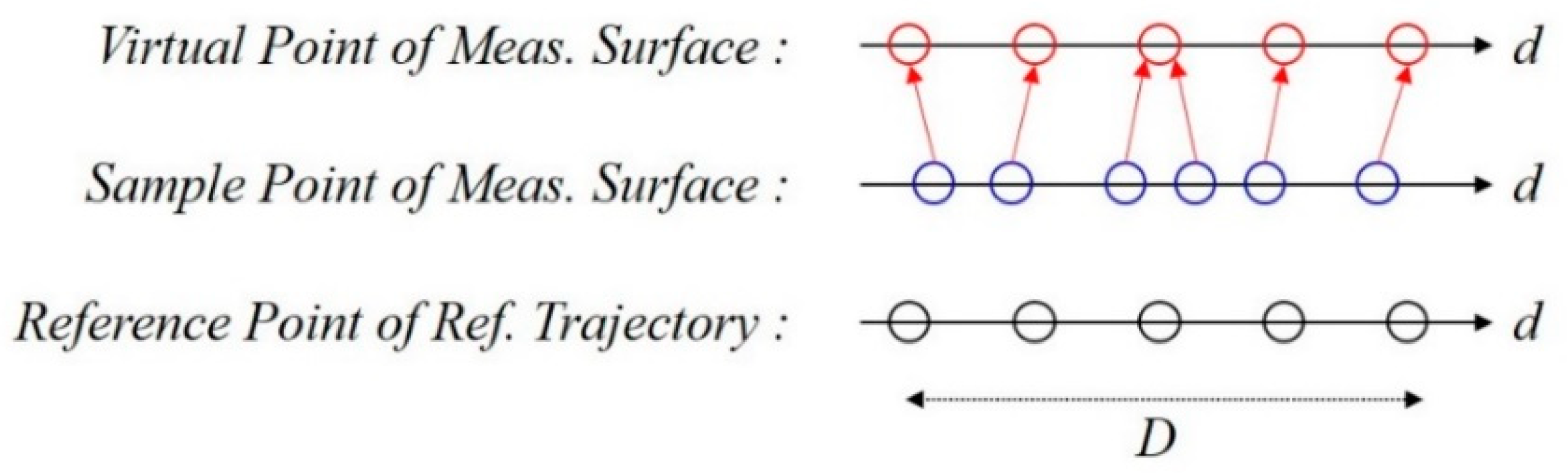
3.2. Domain Conversion
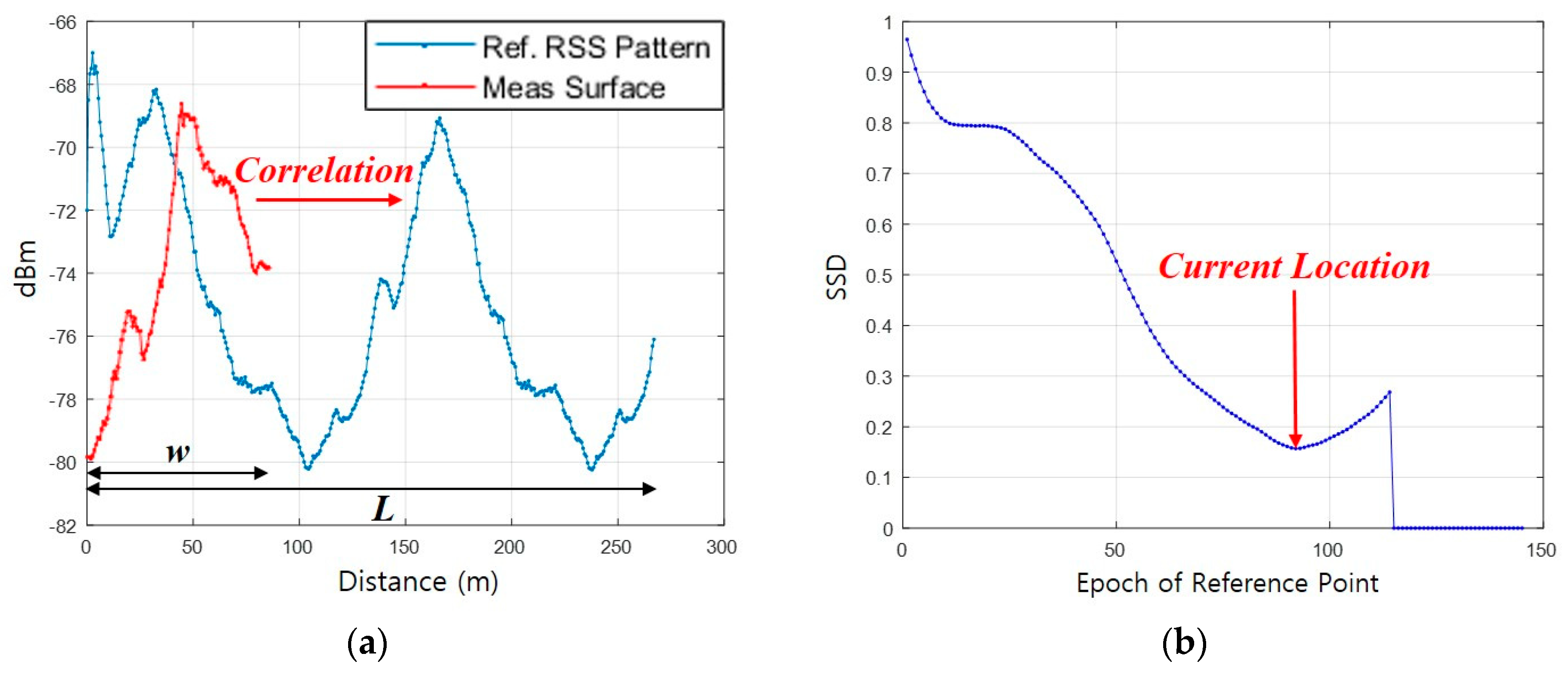
3.3. Surface Correlation
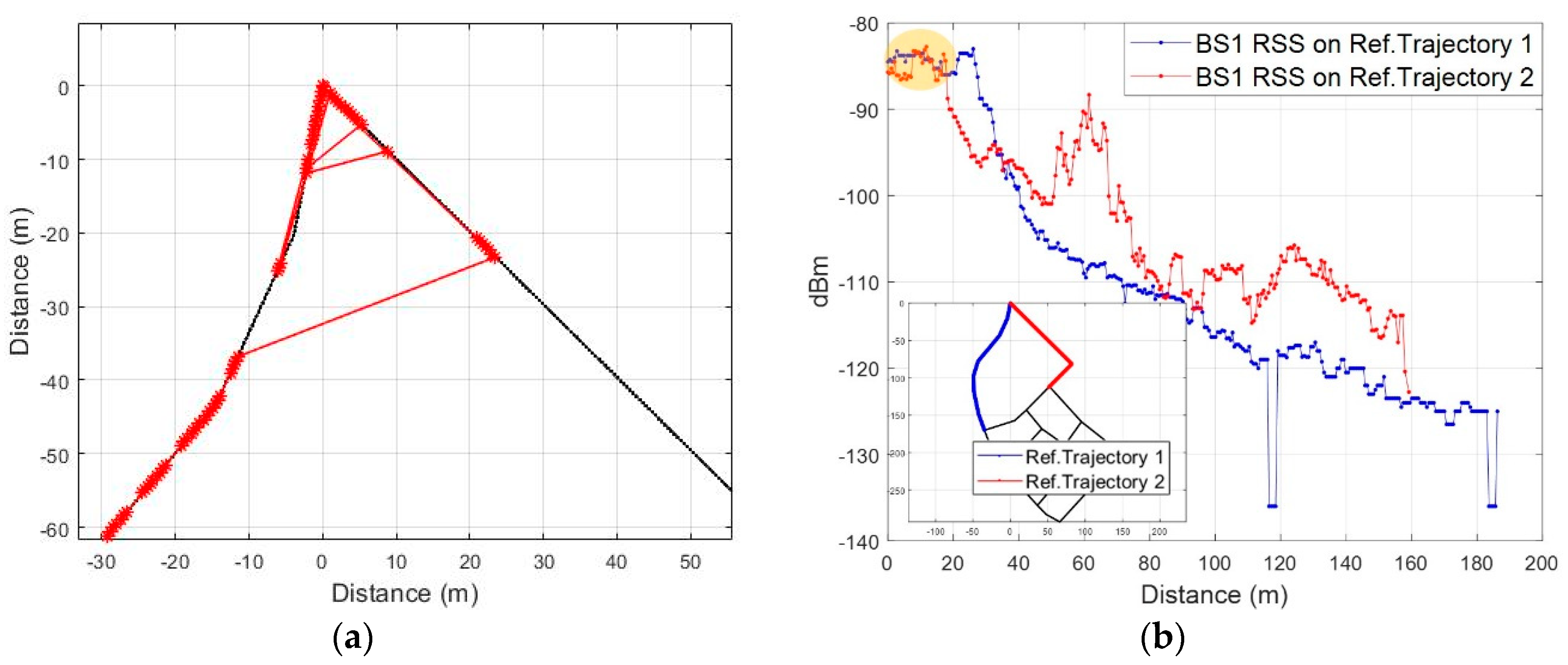
3.4. Generation of Reference Trajectory
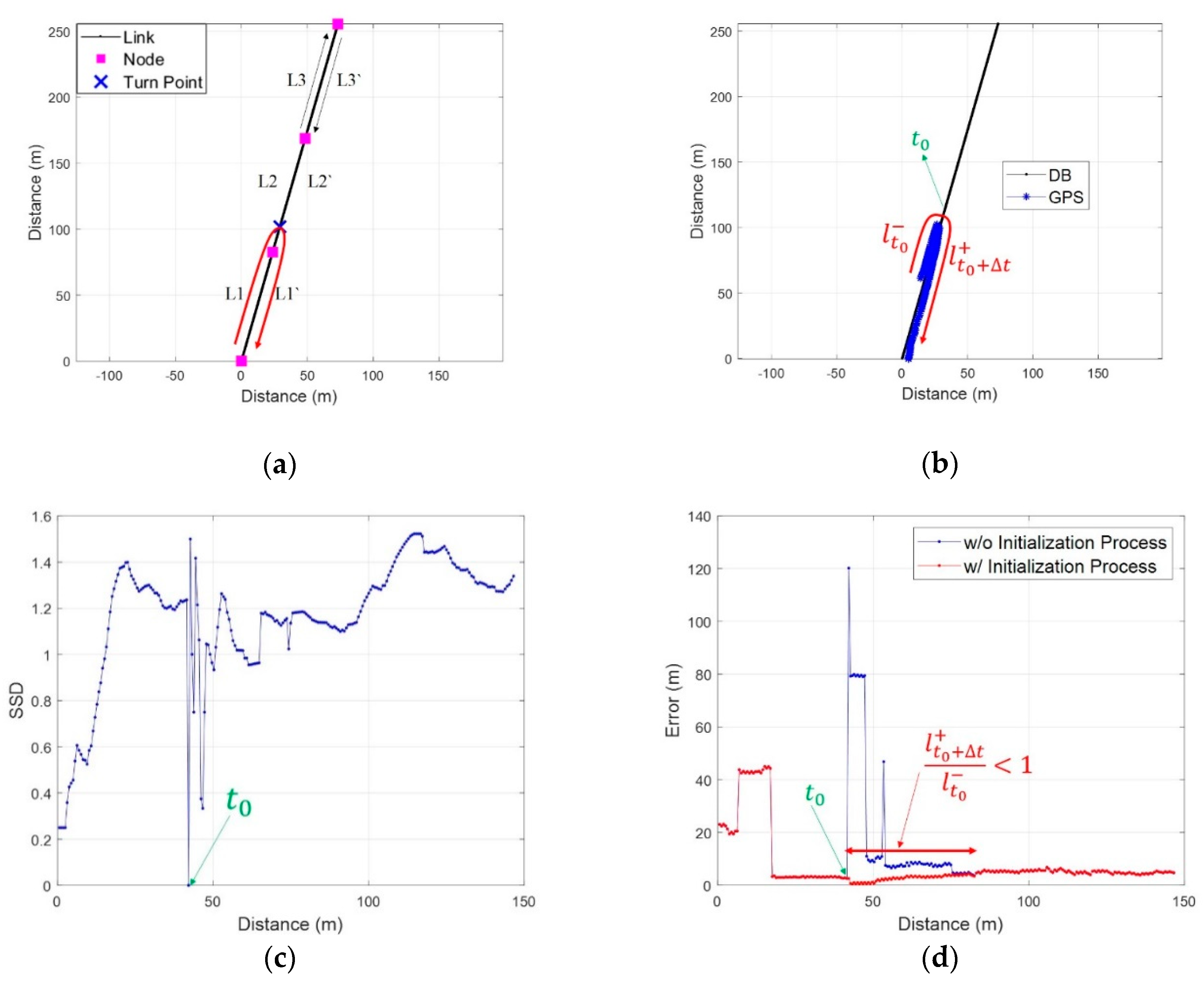
3.4.1. Generation of Reference Trajectory in Initial Phase
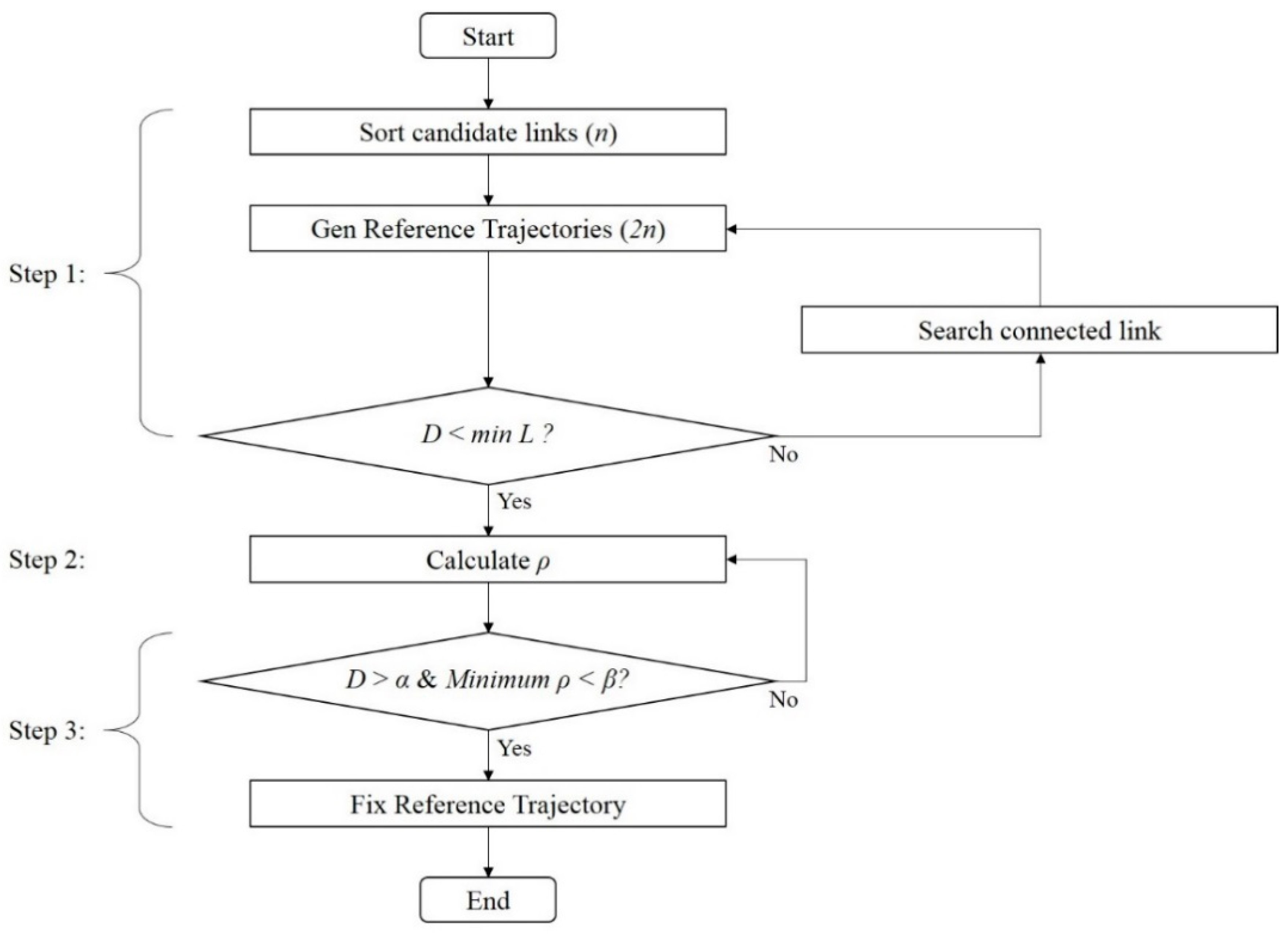
- Find and select n candidate links including measured PCI from the fingerprinting database.
- For each of the selected candidate links, generate bi-directional 2n reference.
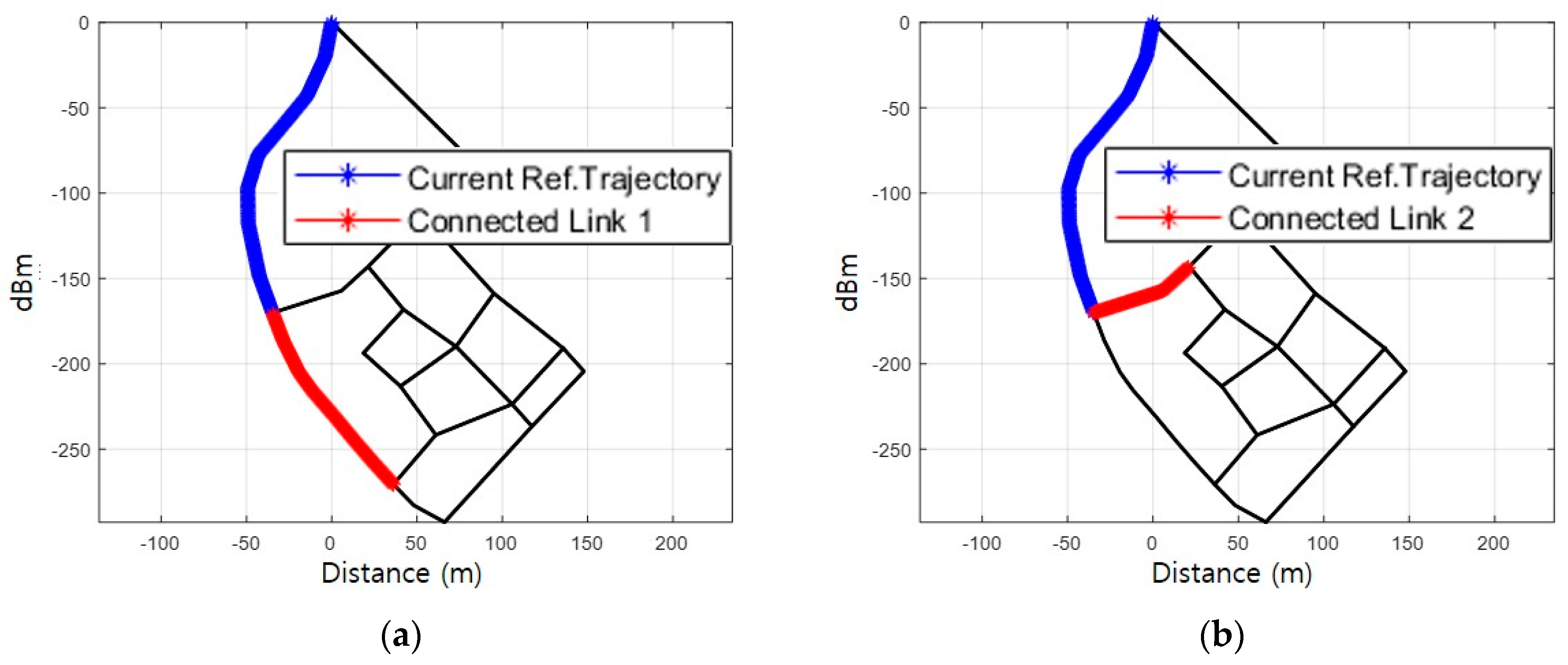
- If the estimated walking distance D is larger than the shortest reference trajectory L before checking Minimum ρ < β, generate new reference trajectories by combining links connected with the current reference trajectory. Only the newly generated reference trajectories matching with estimated turn event (left, right, or straight) from the Pedestrian Dead-Reckoning (PDR) are used for the correlation process.
3.4.2. Generation of Reference Trajectory after Initial Phase
3.5. Localization
4. Experiments and Results
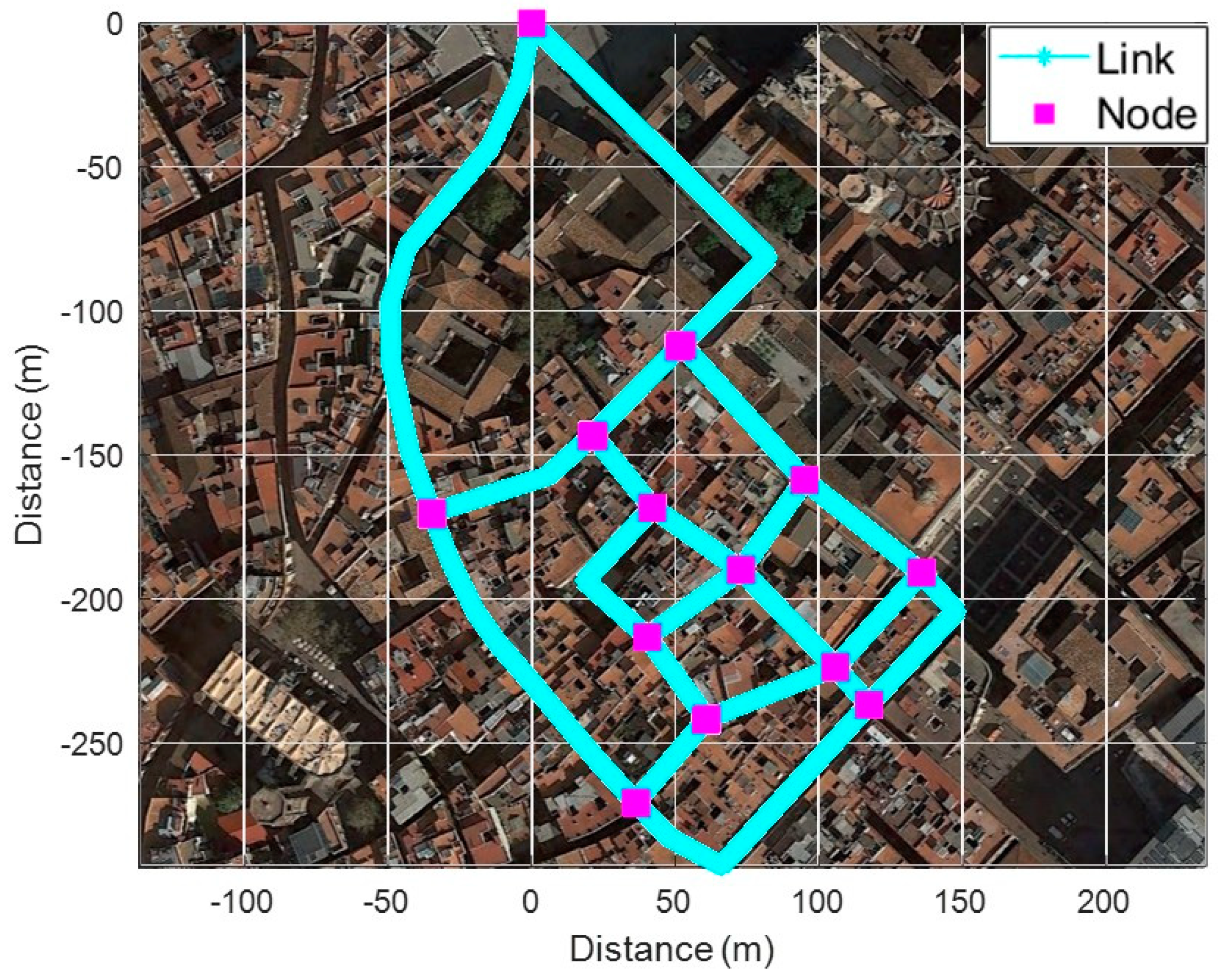
4.1. Test Environment
- Inertial Measurement Unit (IMU): 40 Hz
- PCI & RSS of LTE: 0.5 Hz
- GNSS: 1 Hz
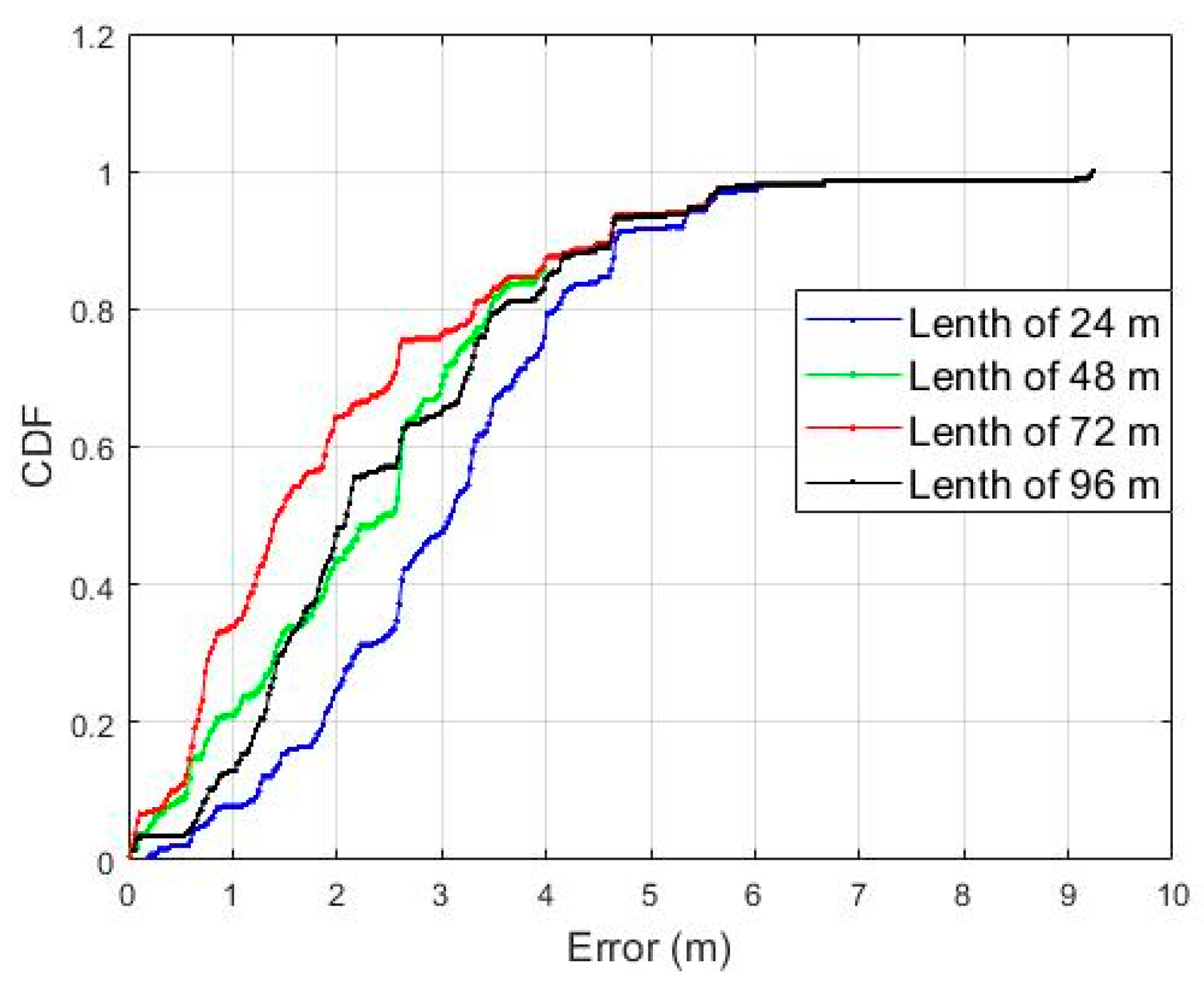
4.2. Performance Analysis according to the Length of Surface
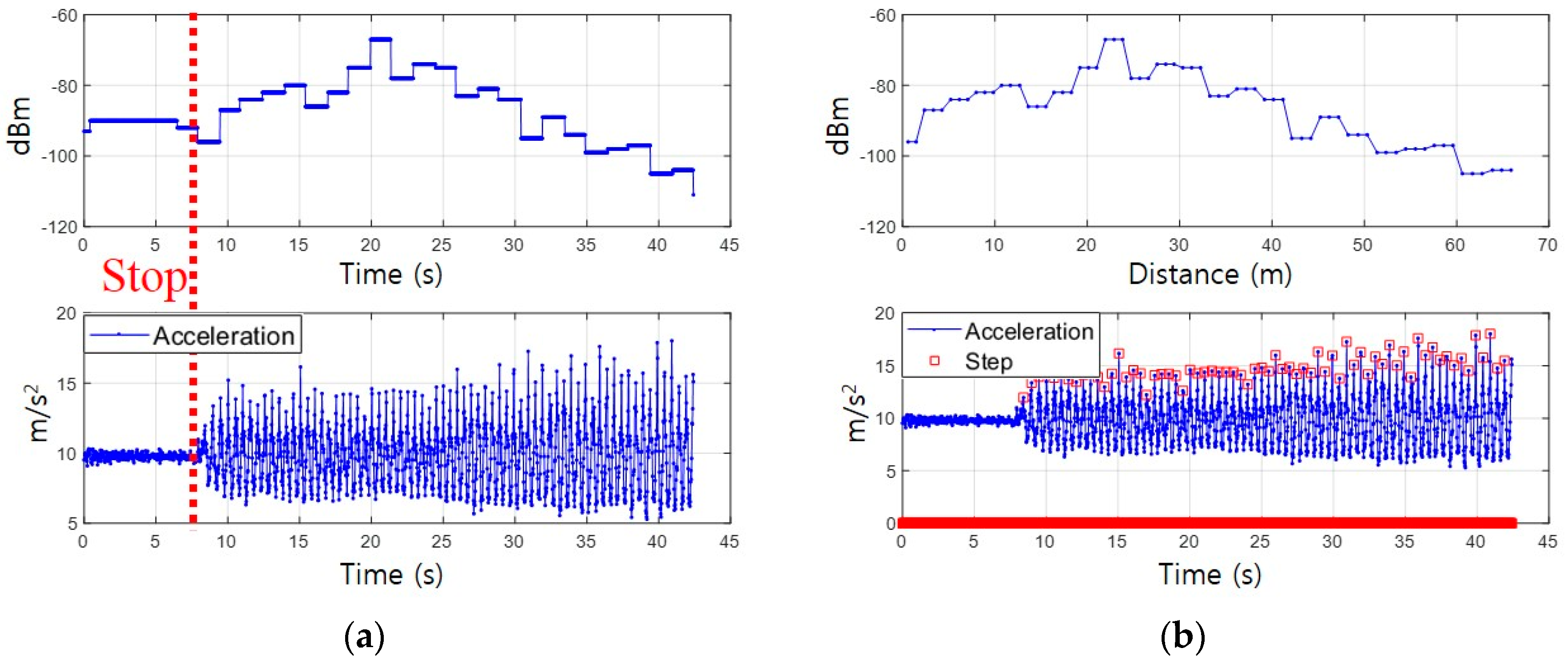
- Drift error of walking distance from PDRThe walking distance is calculated by accumulating the step lengths from the PDR, and the Surface is constructed based on this distance. Drift error of the walking distance induces a localization error when comparing the measured Surface with the reference RSS pattern.
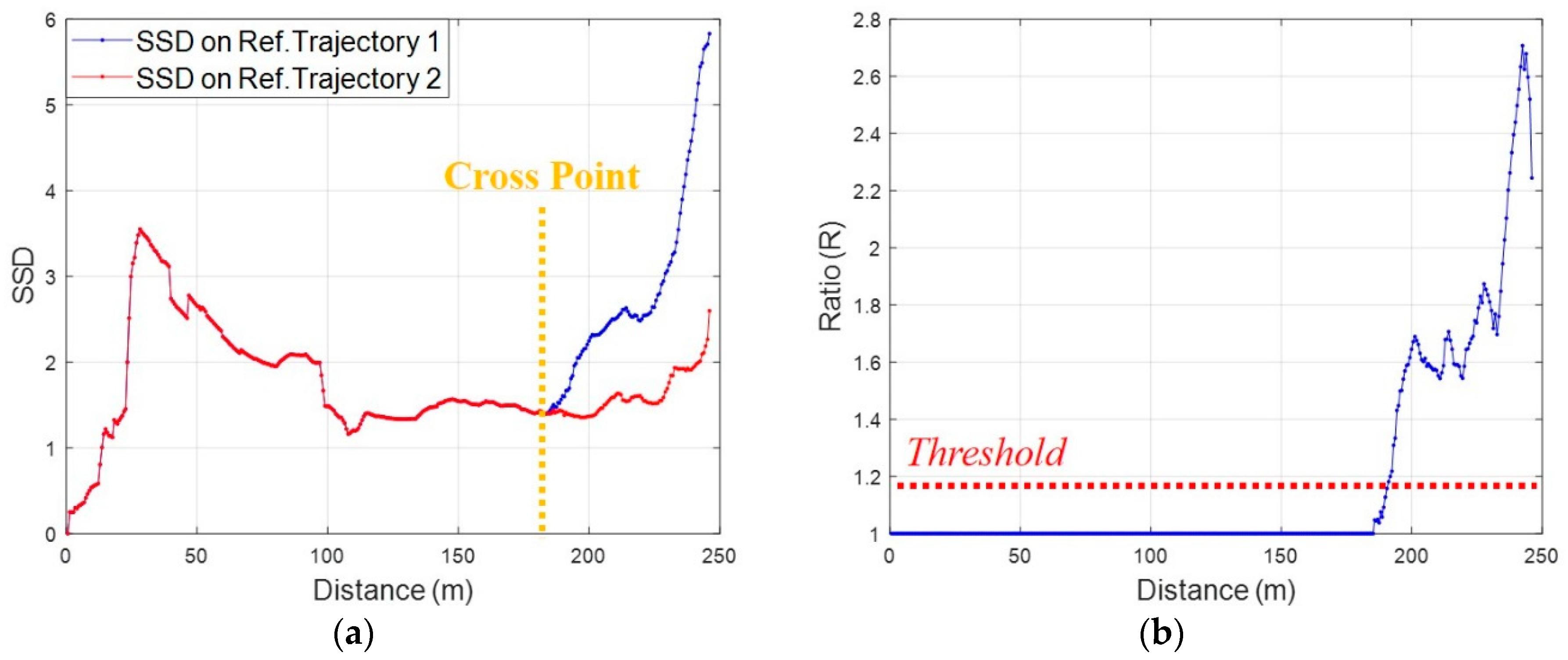
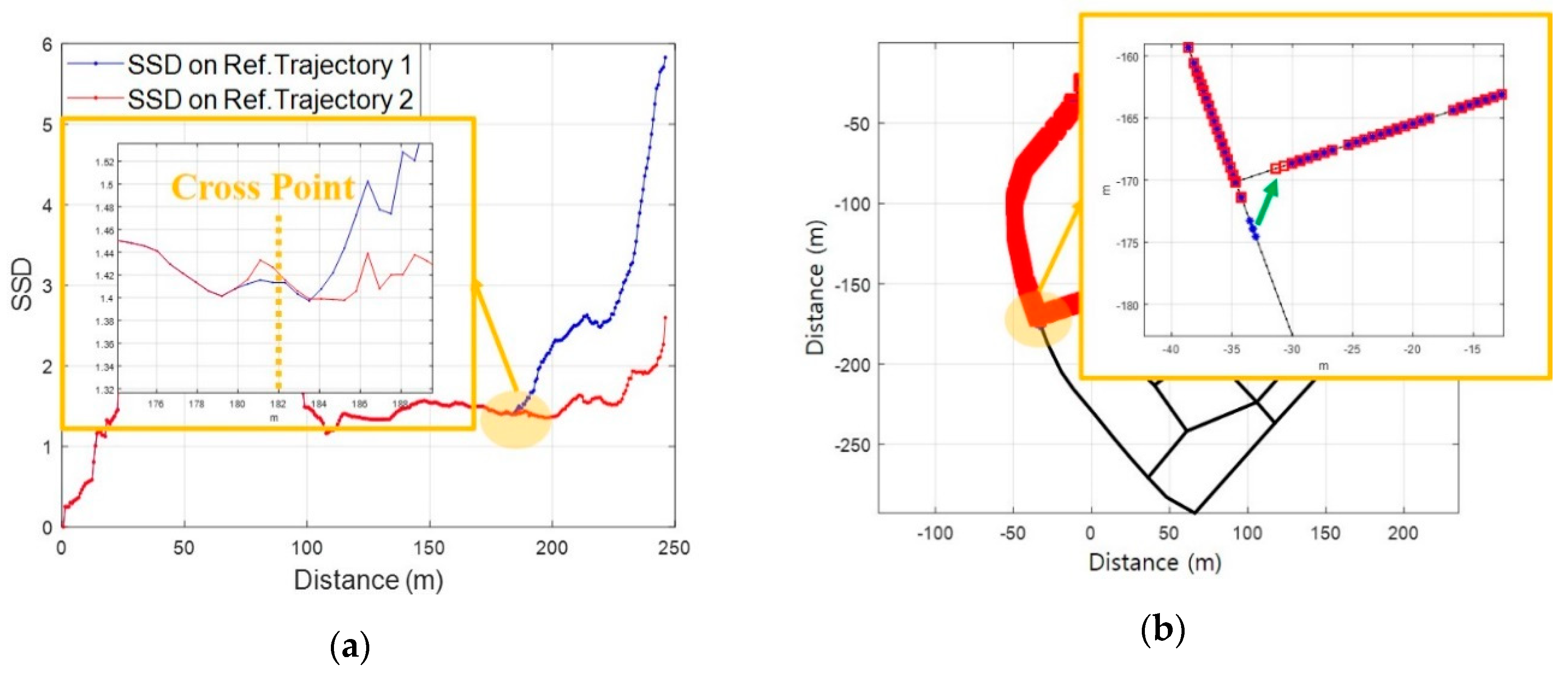
- Sensitivity degradation in fixing reference trajectory at crossroadAs the length of Surface increases, the proportion of the RSS pattern to the common reference trajectory is higher than that of the RSS pattern after a crossroad. As a result, the similarity of RSS patterns between reference trajectories increases and the ratio of correlation coefficient becomes smaller. This serves as a delay in fixing the reference trajectory, which may lead to a problem of fixing the previous reference trajectory beyond the next crossroad.
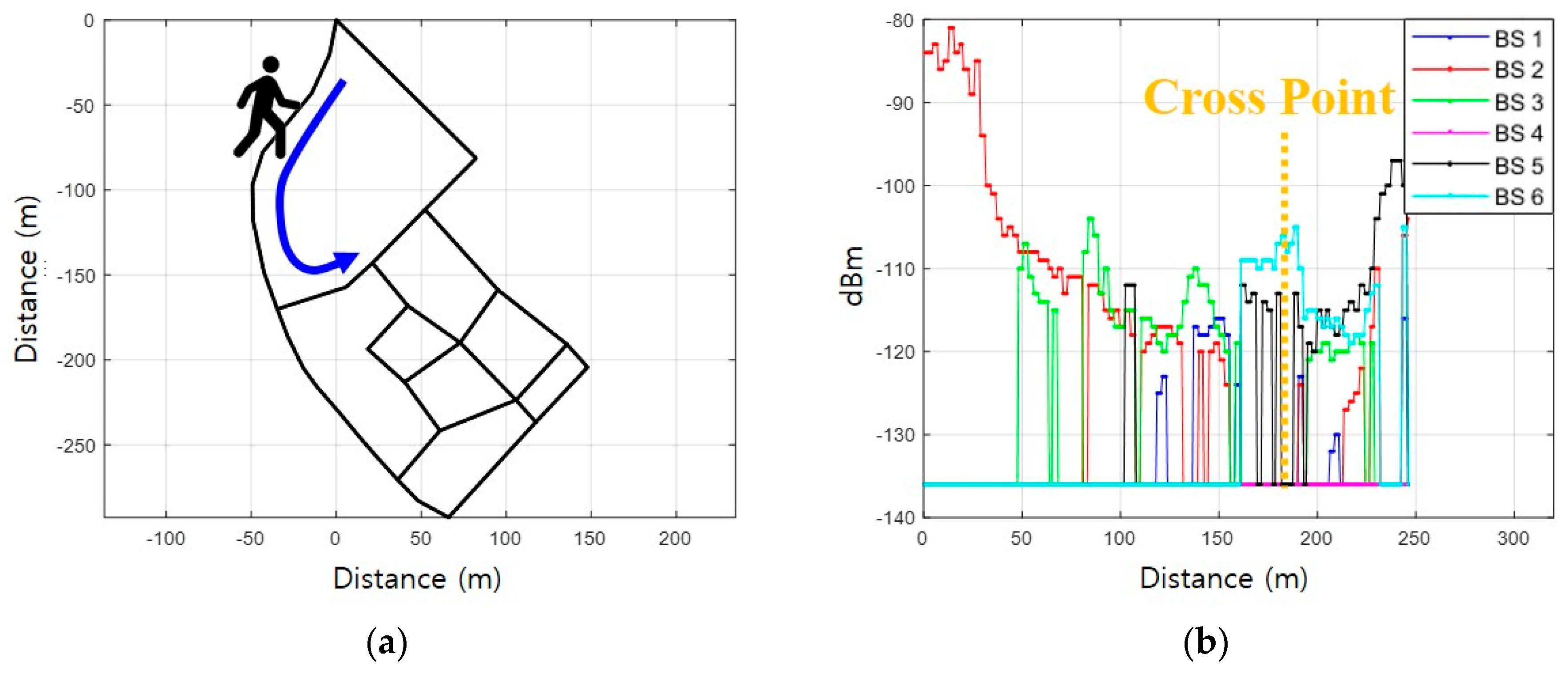
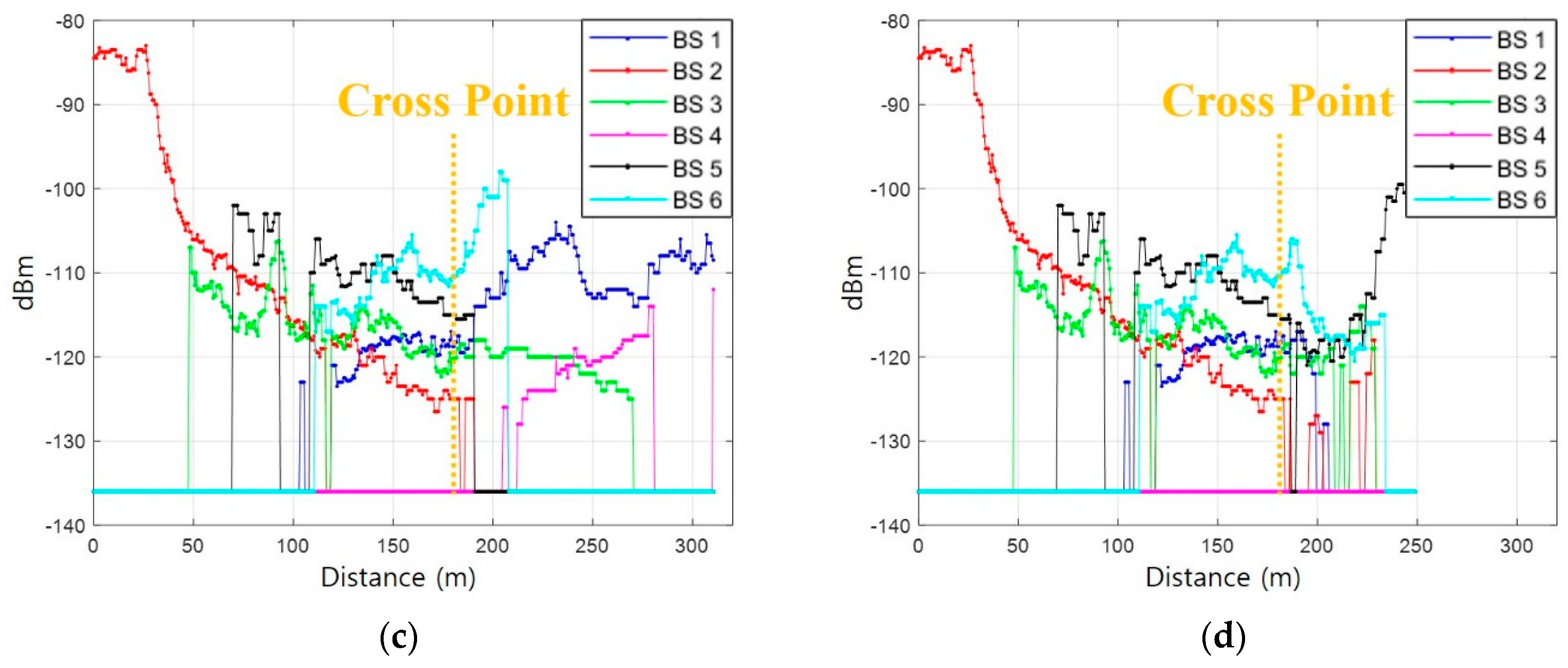
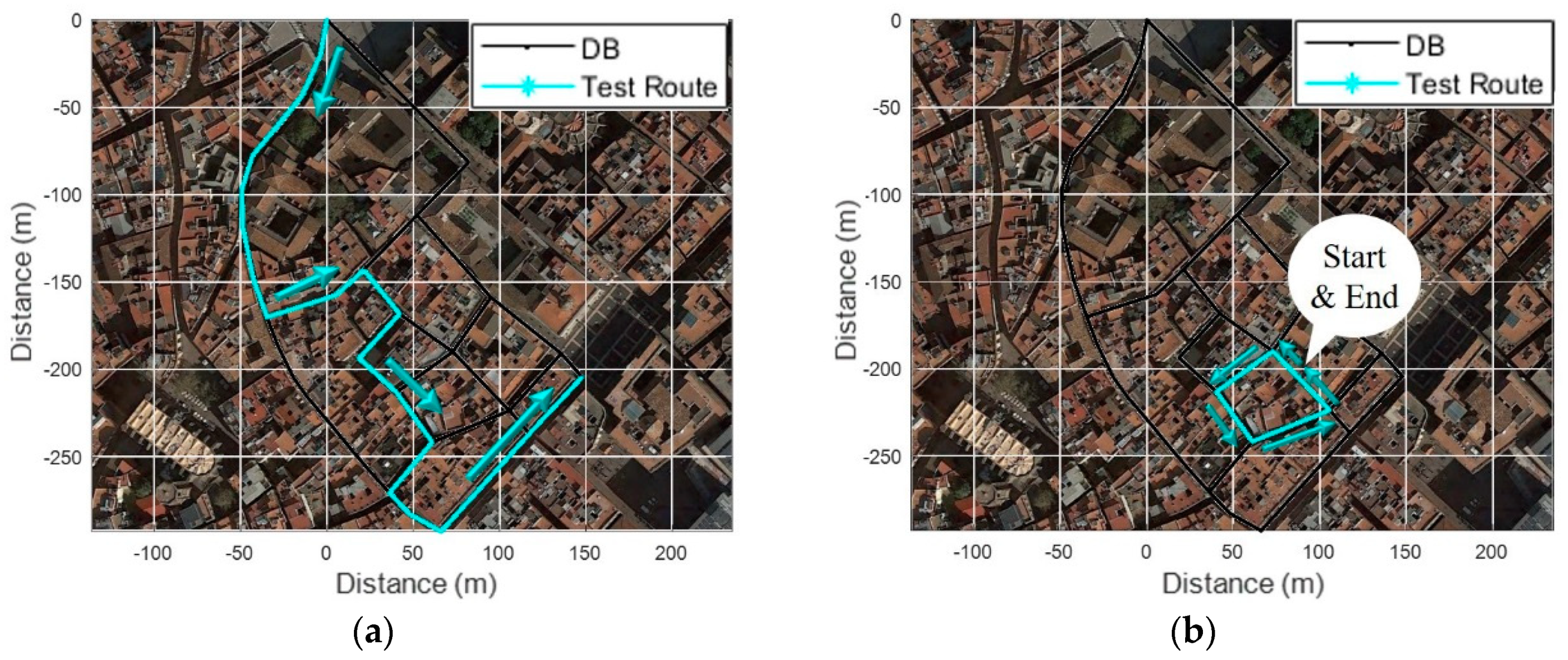
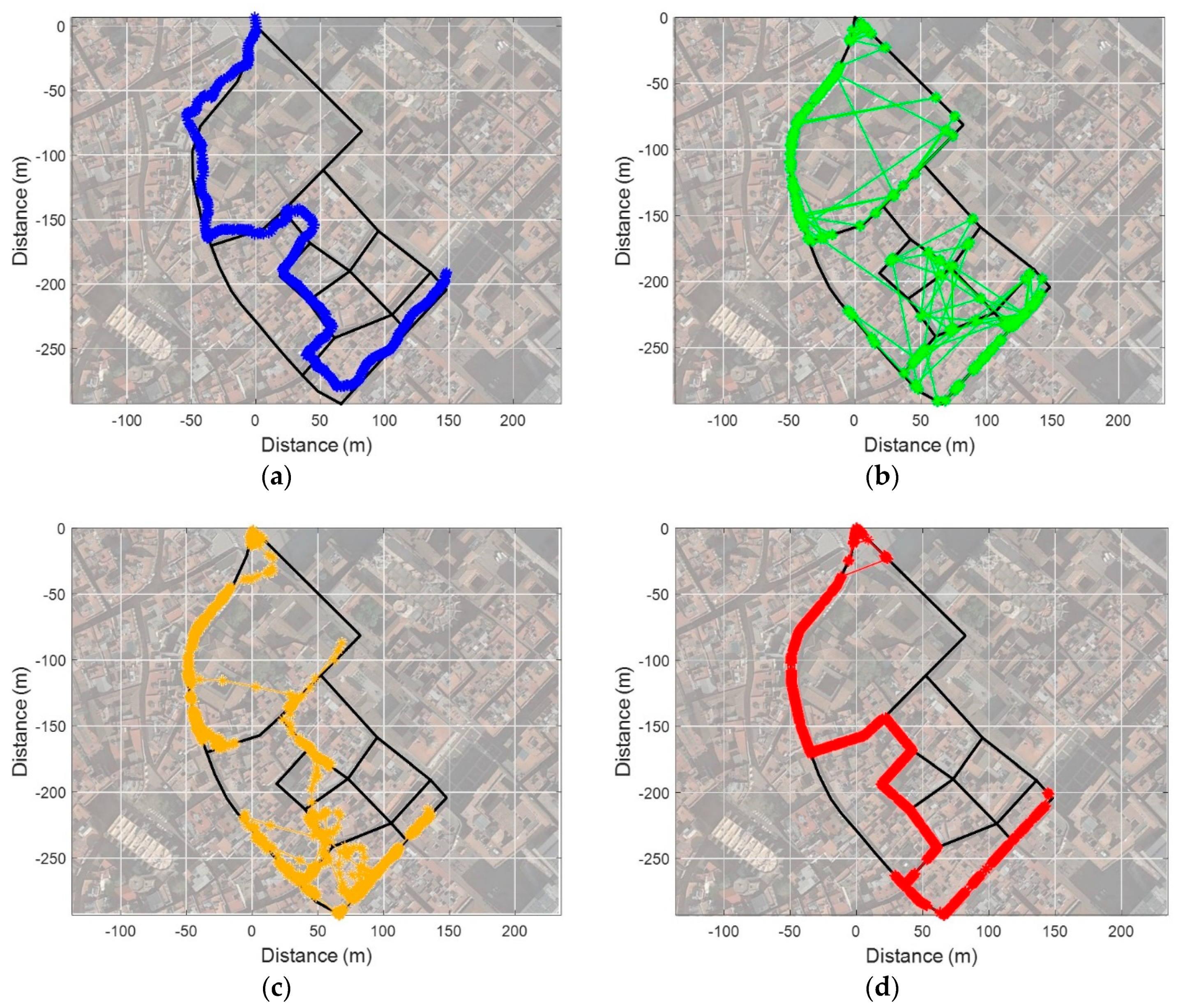
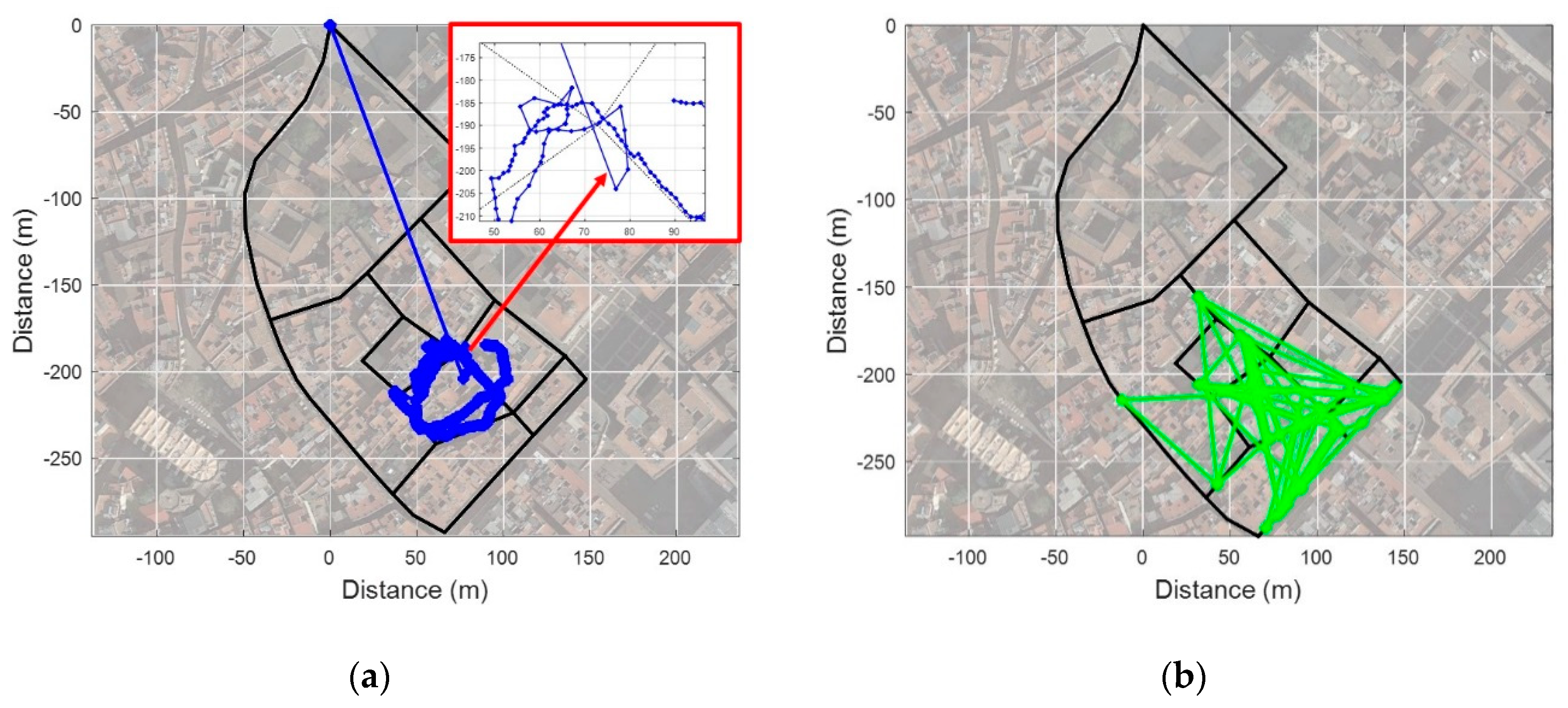
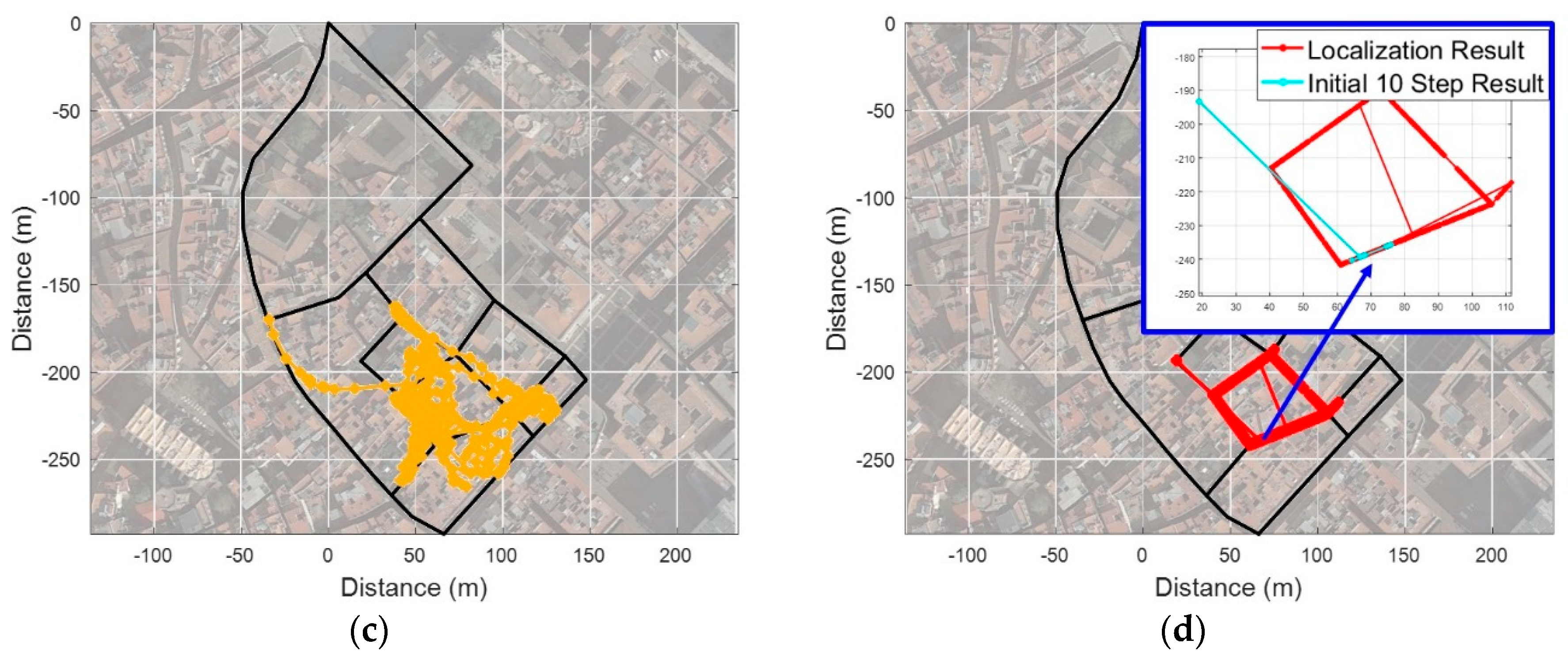
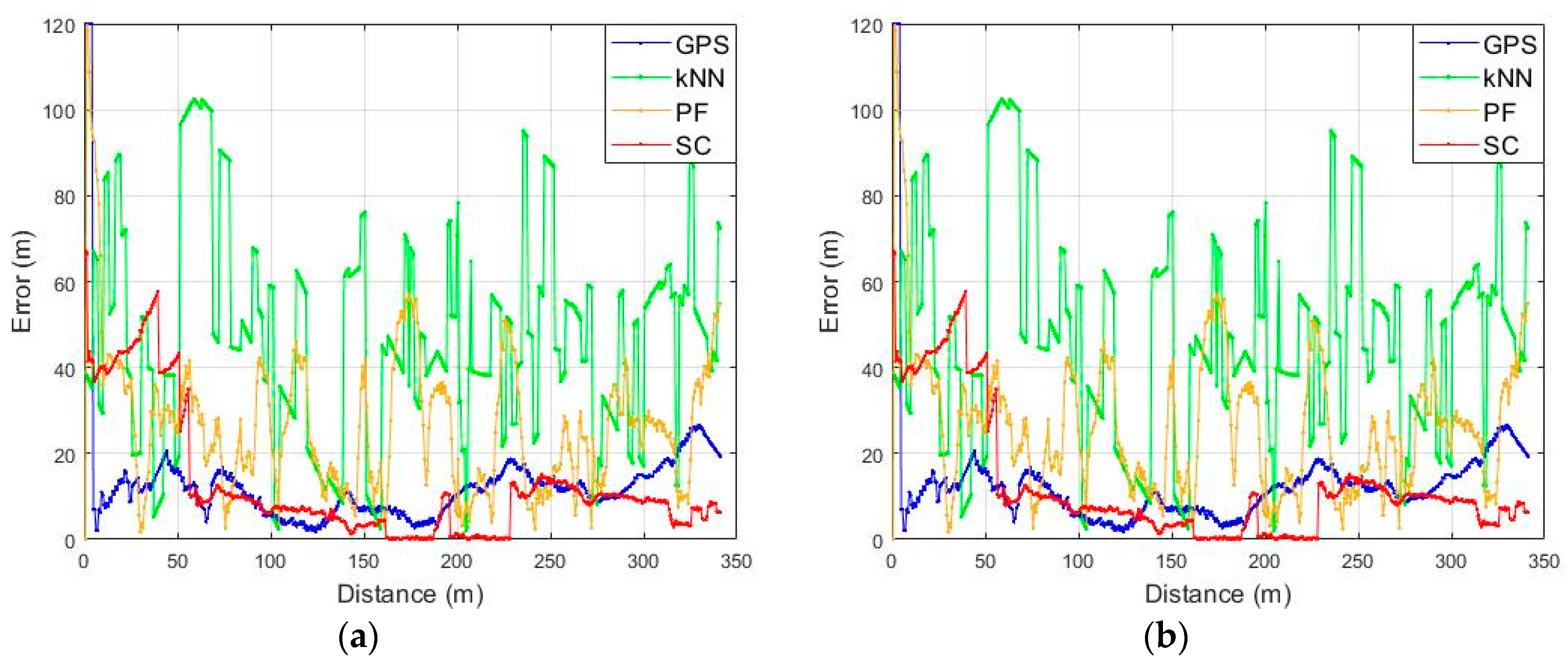
4.3. Test Result from Open Space into Narrow Alley
4.4. Test Result from Narrow Alley to Alley
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ben-Moshe, B.; Elkin, E.; Levi, H.; Weissman, A. Improving Accuracy of GNSS Devices in Urban Canyons. In Proceedings of the 23rd Canadian Conference on Computational Geometry, Toronto, ON, Canada, 10–12 August 2011; pp. 511–515. [Google Scholar]
- Del Peral-Rosado, J.A.; López-Salcedo, J.A.; Seco-Granados, G.; Zanier, F.; Crisci, M. Analysis of Positioning Capabilities of 3GPP LTE. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation 2012 (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 650–659. [Google Scholar]
- Seco-Granados, G.; Navarro-Gallardo, M.; Mıguez-Sanchez, J.; Lopez-Salcedo, J.A.; Del Peral-Rosado, J.A.; Garcıa-Molina, J.A.; Zanier, F.; Crisci, M.; I Castillo, R.E. Performance Analysis of Hybrid GNSS and LTE Localization in Urban Scenarios. In Proceedings of the 8th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, 14–16 December 2016; pp. 1–8. [Google Scholar]
- Mahyuddin, M.F.M.; Isa, A.A.M.; Zin, M.S.I.M.; H, A.M.A.; Manap, Z.; Ismail, M.K. Overview of Positioning Techniques for LTE Technology. JTEC 2017, 9, 43–50. [Google Scholar]
- Mike, T.; Ewald, Z. LTE Location Based Technology Introduction; Rohde Schwarz Inc.: Seoul, Korea, 2013; Available online: https://www.rohde-schwarz.com/kr/applications/white-paper_230854-122561.html (accessed on 29 May 2015).
- Kangas, A.; Wigren, T. Location Coverage and Sensitivity with A-GPS. In Proceedings of the URSI International Symposium on Electromagnetic Theory, Pisa, Italy, 23–27 May 2004; p. 13. [Google Scholar]
- Kunczier, H.; Anegg, H. Enhanced Cell ID based Terminal Location for Urban Area Location based Applications. In Proceedings of the First IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 5–8 January 2004; pp. 595–599. [Google Scholar]
- Wigren, T. Adaptive Enhanced Cell-ID Fingerprinting Localization by Clustering of Precise Position Measurements. IEEE Trans. Veh. Technol. 2007, 56, 3199–3209. [Google Scholar] [CrossRef]
- Liu, J.; Feng, S. RSTD Performance for Small Bandwidth of OTDOA Positioning in 3GPP LTE. In Proceedings of the 2013 IEEE 78th Vehicular Technology Conference (VTC Fall), Las Vegas, NV, USA, 2–5 September 2013; pp. 1–5. [Google Scholar]
- Zhang, T.; Xiao, D.; Cui, J.; Luo, X. A Novel OTDOA Positioning Scheme in Heterogeneous LTE-Advanced Systems. In Proceedings of the 2012 3rd IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 21–23 September 2012; pp. 106–110. [Google Scholar]
- Evolved Universal Terrestrial Radio Access (E-UTRA). LTE Positioning Protocol (LPP). 3GPP TS 36.355. Available online: https://www.3gpp.org/ftp/Specs/archive/36_series/36.355/ (accessed on 22 January 2015).
- Evolved Universal Terrestrial Radio Access (E-UTRA). LTE Positioning Protocol A (LPPa). 3GPP TS 36.455. Available online: https://www.3gpp.org/ftp/Specs/archive/36_series/36.455/ (accessed on 22 January 2015).
- Gundlegard, D.; Akram, A.; Fowler, S.; Ahmad, H. Cellular Positioning using Fingerprinting based on Observed Time Differences. In Proceedings of the 2013 International Conference on Smart Communications in Network Technologies (SaCoNeT), Paris, France, 17–19 June 2013; pp. 1–5. [Google Scholar]
- Zhu, J.; Luo, X.; Chen, D. Maximum Likelihood Scheme for Fingerprinting Positioning in LTE System. In Proceedings of the 2012 IEEE 14th International Conference on Communication Technology, Chengdu, China, 9–11 November 2012; pp. 428–432. [Google Scholar]
- Turkka, J.; Hiltunen, T.; Mondal, R.U.; Ristaniemi, T. Performance Evaluation of LTE Radio Fingerprinting using Field Measurements. In Proceedings of the 2015 International Symposium on Wireless Communication Systems (ISWCS), Brussels, Belgium, 25–28 August 2015; pp. 466–470. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Moreira, A. Analysis of sources of large positioning errors in deterministic fingerprinting. Sensors 2017, 17, 2736. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Yu, Y.; Yuan, X.; Wan, N.; Yang, L. Situation and Development Tendency of Indoor Positioning. China Commun. 2013, 10, 42–55. [Google Scholar] [CrossRef]
- Ascher, C.; Kessler, C.; Wankerl, M.; Trommer, G.F. Dual IMU Indoor Navigation with Particle Filter based Map-Matching on a Smartphone. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–5. [Google Scholar]
- Klepal, M.; Beauregard, S. A Backtracking Particle Filter for Fusing Building Plans with PDR Displacement Estimates. In Proceedings of the 2008 5th Workshop on Positioning, Navigation and Communication (WPNC), Hannover, Germany, 27 March 2008; pp. 207–212. [Google Scholar]
- Masiero, A.; Guarnieri, F.; Pirotti, F.; Vettore, A. A Particle Filter for Smartphone-Based Indoor Pedestrian Navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Shin, B.; Yu, B.; Bang, J.; Kee, C.; Lee, T. WiFi based Robust Positioning System in Large Scale and Weak Signal Environment. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 25–29 September 2017; pp. 2894–2897. [Google Scholar]
- Shin, B.; Jeon, S.; Lee, J.H.; Kee, C.; Lee, T. Precise Localization Technology of Mobile Phone on a Vehicle in Tunnel using LTE Signal based Surface Correlation. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 190–222. [Google Scholar]
- Lee, J.H.; Shin, B.; Lee, S.; Park, J.; Kim, J.; Lee, T. A Step Length Estimation based on Motion Recognition and Adaptive Gait Cognition using as Smartphone. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 243–249. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
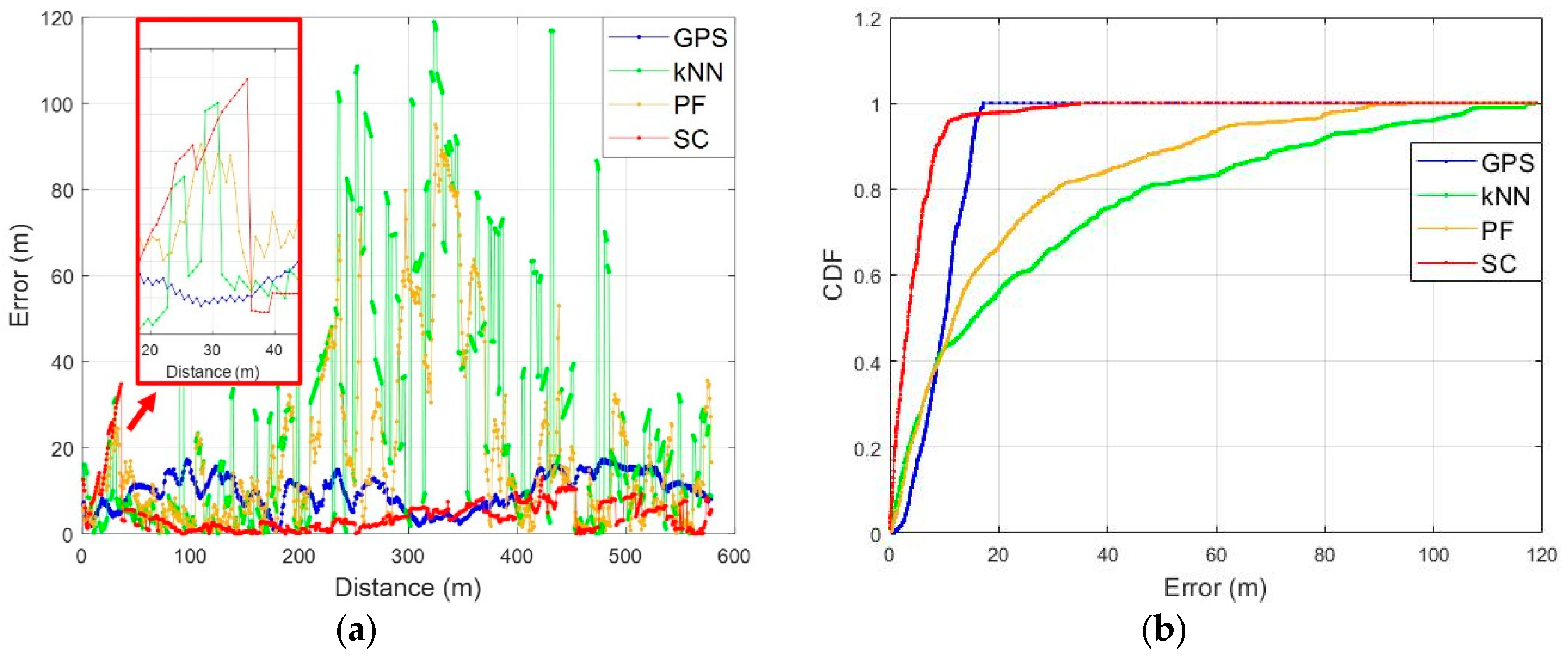
| Scenario | GPS | kNN | PF | SC |
|---|---|---|---|---|
| 1 | 10.15 m (50%) 13.99 m (80%) | 15.47 m (50%) 46.53 m (80%) | 11.93 m (50%) 30.7 m (80%) | 3.42 m (50%) 7.19 m (80%) |
| 2 | 11.69 m (50%) 15.73 m (80%) | 44.99 m (50%) 62.63 m (80%) | 25.98 m (50%) 38.26 m (80%) | 8.59 m (50%) 13.28 m (80%) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.H.; Shin, B.; Shin, D.; Park, J.; Ryu, Y.S.; Woo, D.H.; Lee, T. Surface Correlation-Based Fingerprinting Method Using LTE Signal for Localization in Urban Canyon. Sensors 2019, 19, 3325. https://doi.org/10.3390/s19153325
Lee JH, Shin B, Shin D, Park J, Ryu YS, Woo DH, Lee T. Surface Correlation-Based Fingerprinting Method Using LTE Signal for Localization in Urban Canyon. Sensors. 2019; 19(15):3325. https://doi.org/10.3390/s19153325
Chicago/Turabian StyleLee, Jung Ho, Beomju Shin, Donghyun Shin, Jinwoo Park, Yong Sang Ryu, Deok Ha Woo, and Taikjin Lee. 2019. "Surface Correlation-Based Fingerprinting Method Using LTE Signal for Localization in Urban Canyon" Sensors 19, no. 15: 3325. https://doi.org/10.3390/s19153325
APA StyleLee, J. H., Shin, B., Shin, D., Park, J., Ryu, Y. S., Woo, D. H., & Lee, T. (2019). Surface Correlation-Based Fingerprinting Method Using LTE Signal for Localization in Urban Canyon. Sensors, 19(15), 3325. https://doi.org/10.3390/s19153325