Structural Parameters Optimization of Elastic Cell in a Near-Bit Drilling Engineering Parameters Measurement Sub


Abstract
:1. Introduction
2. Proposed Methodology Framework
- Sensitivity, stiffness, and strength analysis of an elastic cell. In this step, the expressions of the sensitivities and stiffnesses of the elastic cell are derived based on the mechanics of materials. As a result, the relationships among the structural parameters of the elastic cell and each sensitivity and stiffness can be determined. Meanwhile, the stress state of the elastic cell is analyzed based on the mechanics of materials and elastic theory. Thus, the relationships among the structural parameters of the elastic cell and the structural strength can be determined. In conclusion, the relationships among the structural parameters of the elastic cell and its main performances are described systematically.
- Establishment and solution of a mathematical programming model. A multi-objective optimization model is established to characterize the multiple relationships among measurement sensitivities, structural stiffnesses, and strength in the design of structural parameters. In the modeling process, the sensitivities and stiffnesses are specified as objective functions, and the strength indicators and some engineering or process requirements are specified as constraints. NSGA-II is used to solve the multi-objective optimization model. The optimization results can provide a flexible theoretical solution database.
- Design verification and examination based on the finite element method (FEM). The measurement performance and static strength (in the extreme measurement condition) of the proposed design are verified by the static analysis. The analysis should be regarded as the validation of the optimization algorithm. If the error is large, return to step 2 and examine the objective functions or constraint functions in the optimization model. In addition, case-specific conditions can be set to examine the integrity of the proposed structure. This may provide feedback information on the proposed design. This part reflects the scalability of the proposed model.
- Design examination based on transient dynamic analysis. Transient dynamic analysis is applied to examine dynamic responses of the proposed design under the impact loads of some extreme conditions. If the structure cannot bear the impact load under the working conditions studied, go back to step 2 and adjust the constraint functions in the optimization model. In this study, the transient dynamic models of the sub under two typical working conditions are established, and the dynamic response of the structure under the corresponding impact load is investigated. Similar to step 3, some case-specific conditions can be added to the dynamic analysis in specific applications.
3. Sensitivity, Stiffness and Strength Analysis of Elastic Cell
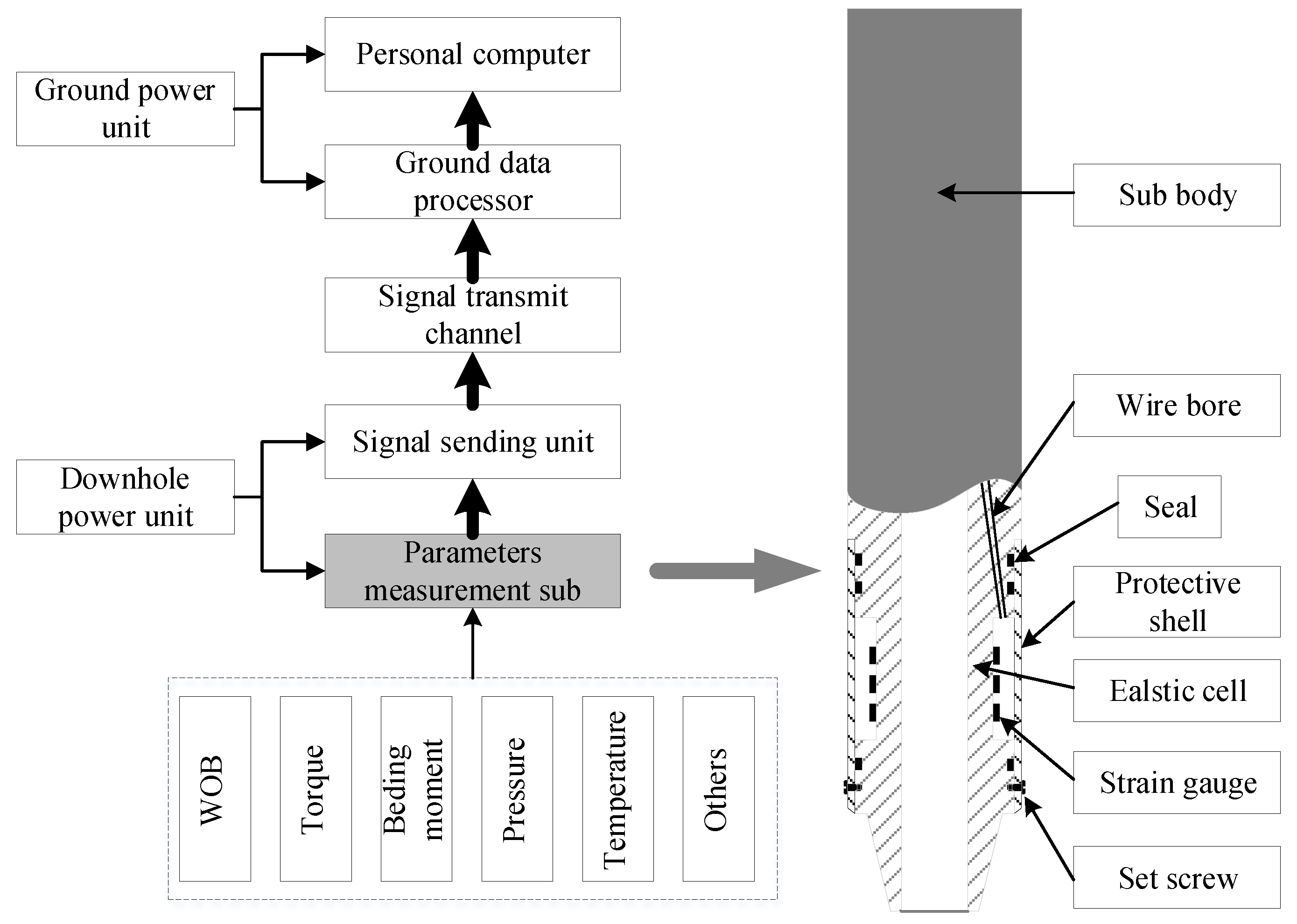
3.1. Basic Principle of Parameters Measurement
3.2. Sensitivity and Stiffness Analysis of Elastic Cell
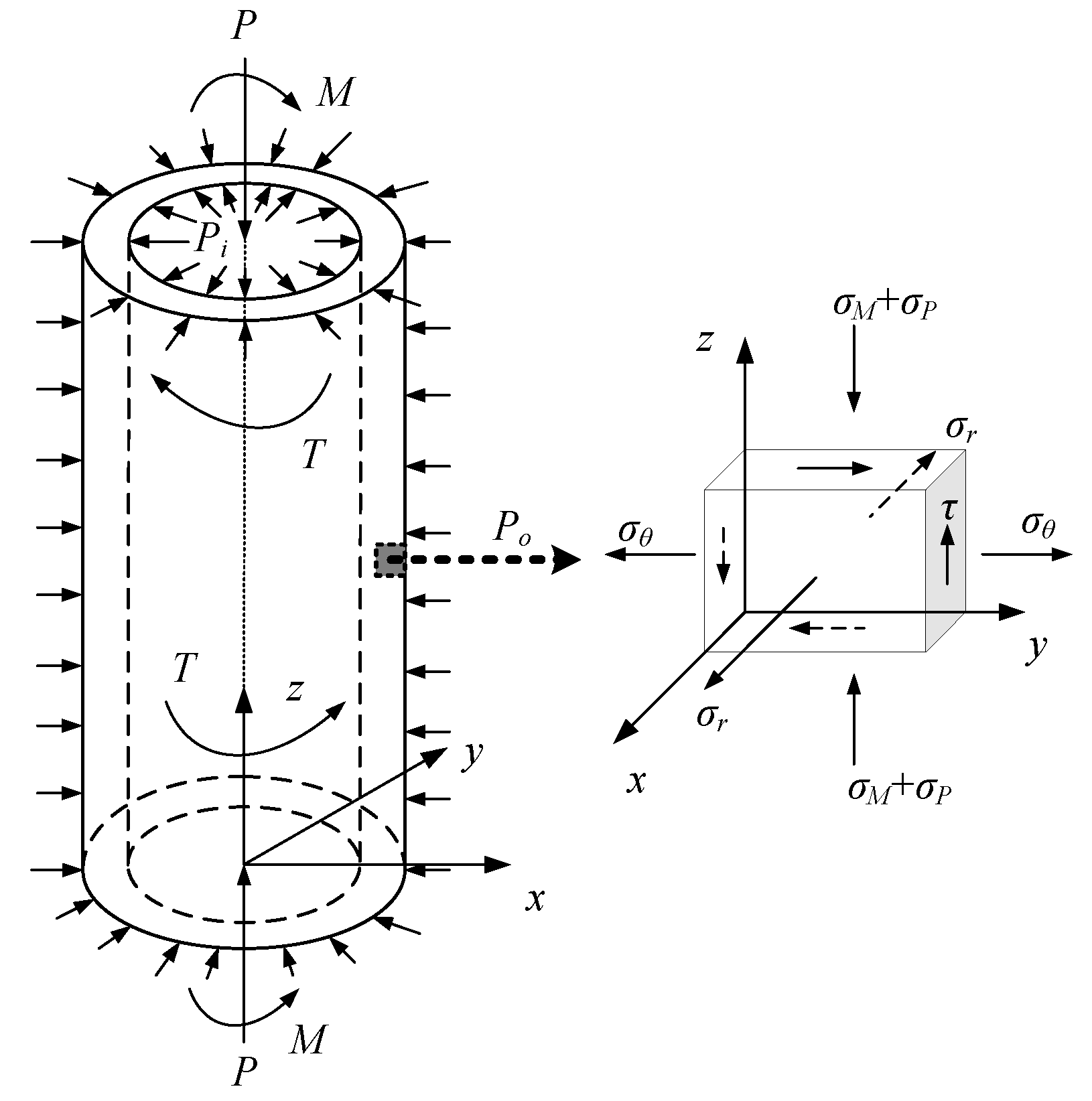
3.3. Structural Strength Analysis of Elastic Cell
4. Establishment and Solution of a Mathematical Programming Model
4.1. Establishment of the a Mathematical Programming Model
4.1.1. Initial Consideration of the Objective Function
4.1.2. Calculation of Sensitivity Boundary
4.1.3. Determination of Objective Functions and Constraints
4.2. Model Solution Based on NSGA-II
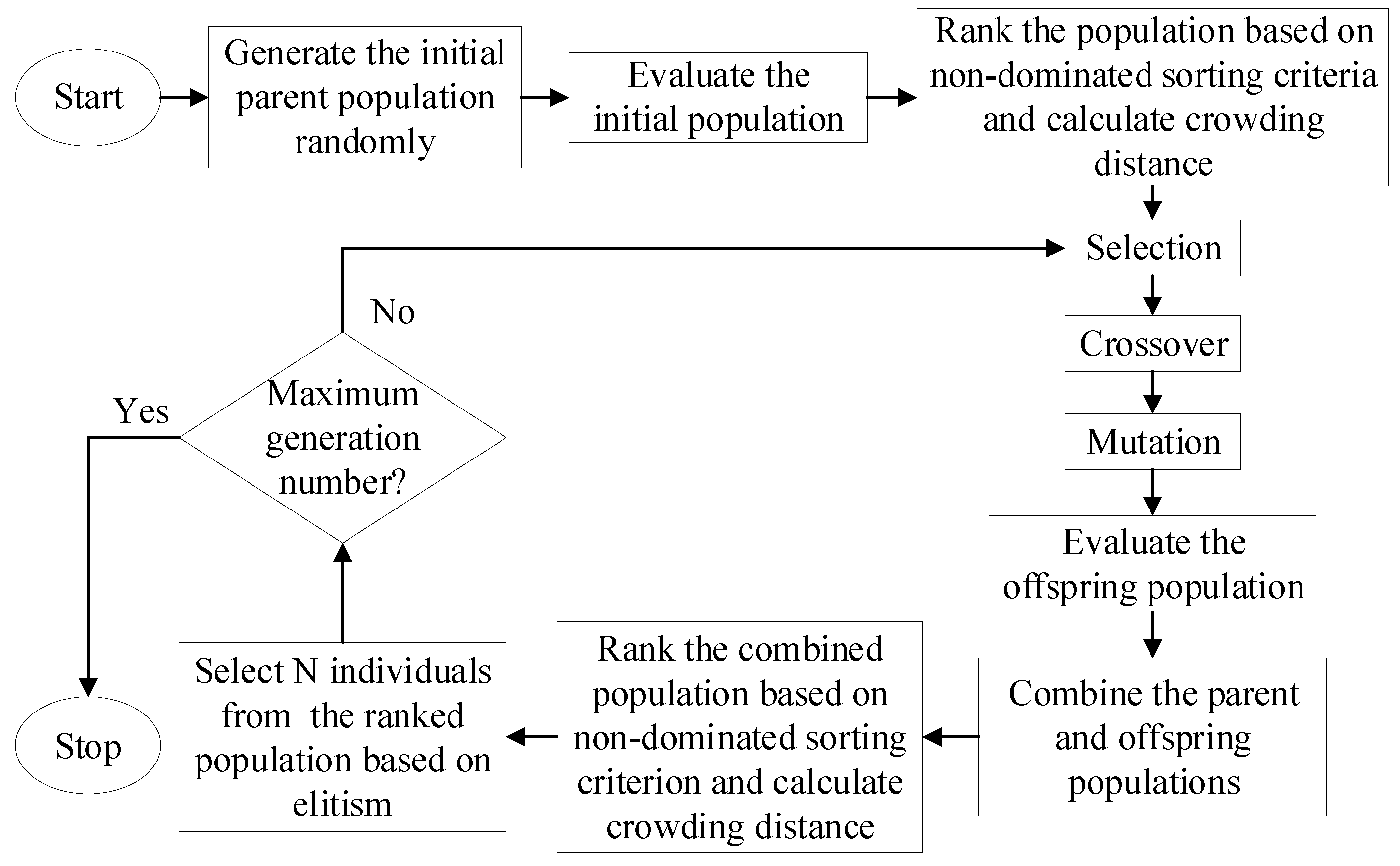
4.2.1. A Brief Description of NSGA-II
4.2.2. Configuration and Application of NSGA-II
5. Design Verification and Examination Based on FEM
5.1. Verification of Measurement Performance and Static Strength
5.2. Transient Dynamic Analysis of Design
6. Conclusions
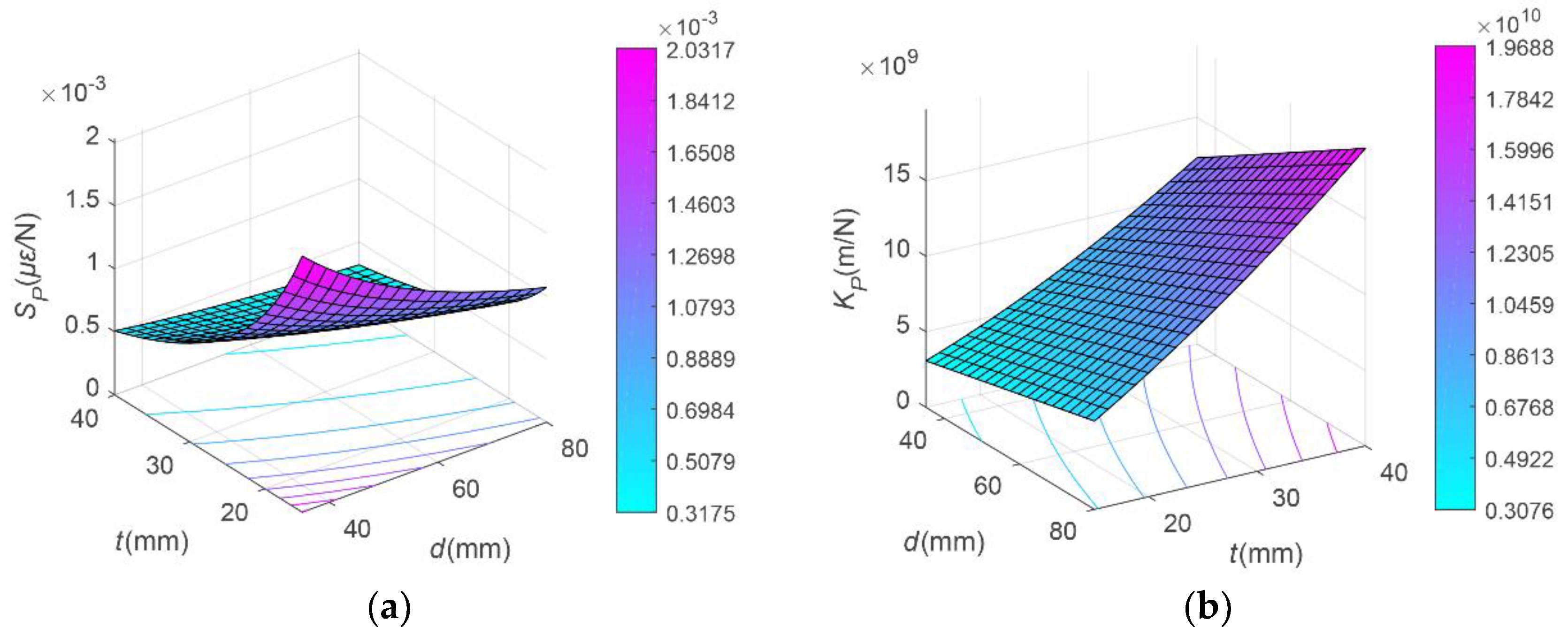
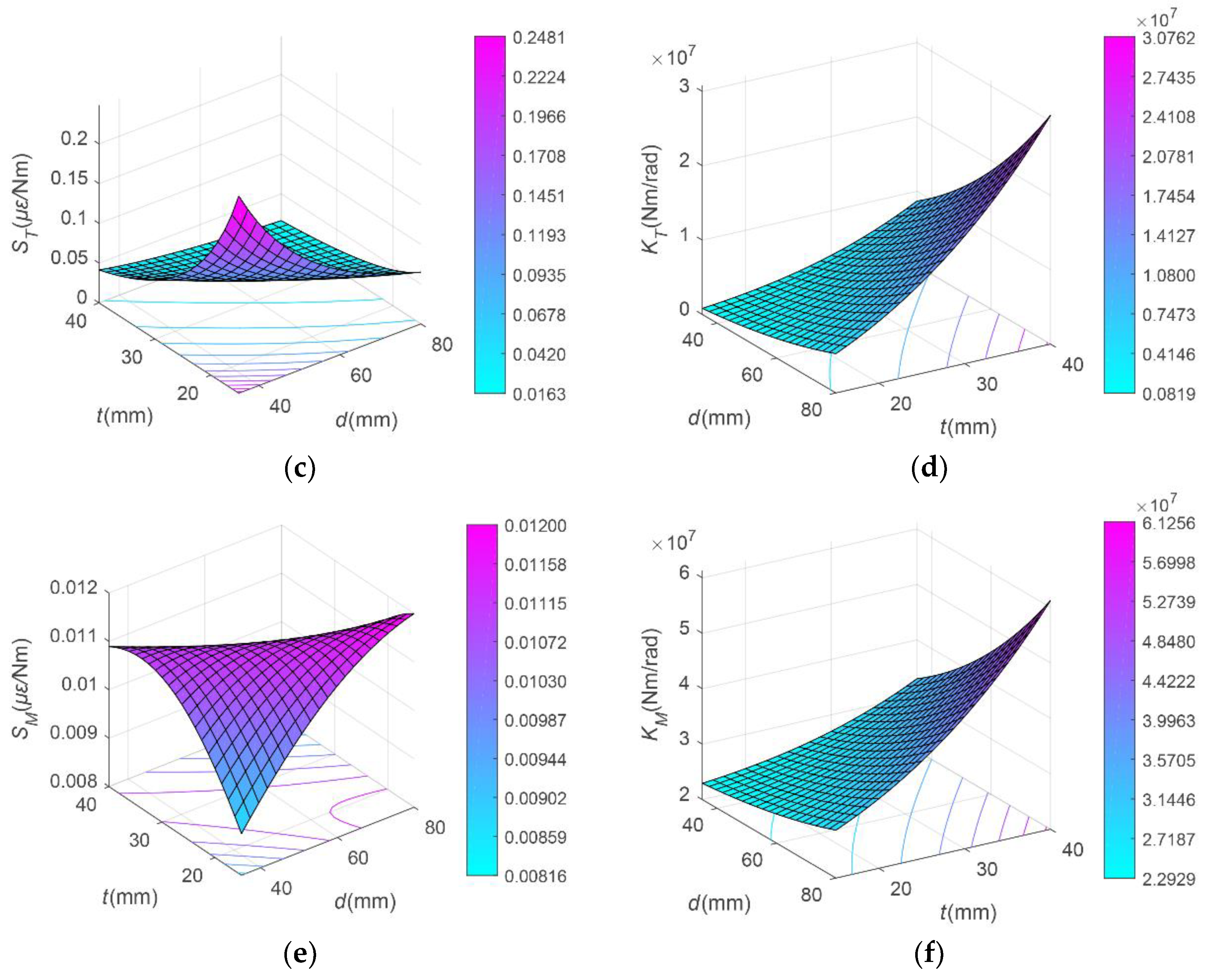
- The multiple relations among measurement sensitivities, structural stiffnesses and strength in the structural parameters design of an elastic cell were systematically summarized. As d and t increase, the tension and compression stiffness, torsional stiffness, and bending stiffness of the structure increase, the measurement sensitivities of WOB and torque decrease, and the measurement sensitivity trend of bending moment is not monotonic. Moreover, the relationships among d, t and the structural strength of an elastic cell are depicted quantitatively.
- A multi-objective optimization model was established to characterize the multiple relations among measurement sensitivities, structural stiffnesses, and strength in the design of structural parameters. NSGA-II was applied to solve the multi-objective optimization problem. The results showed that the optimization strategy could obtain the optimal solution set of the problem in a short time. This optimization result provided a flexible database for the design of the structural parameters of an elastic cell.
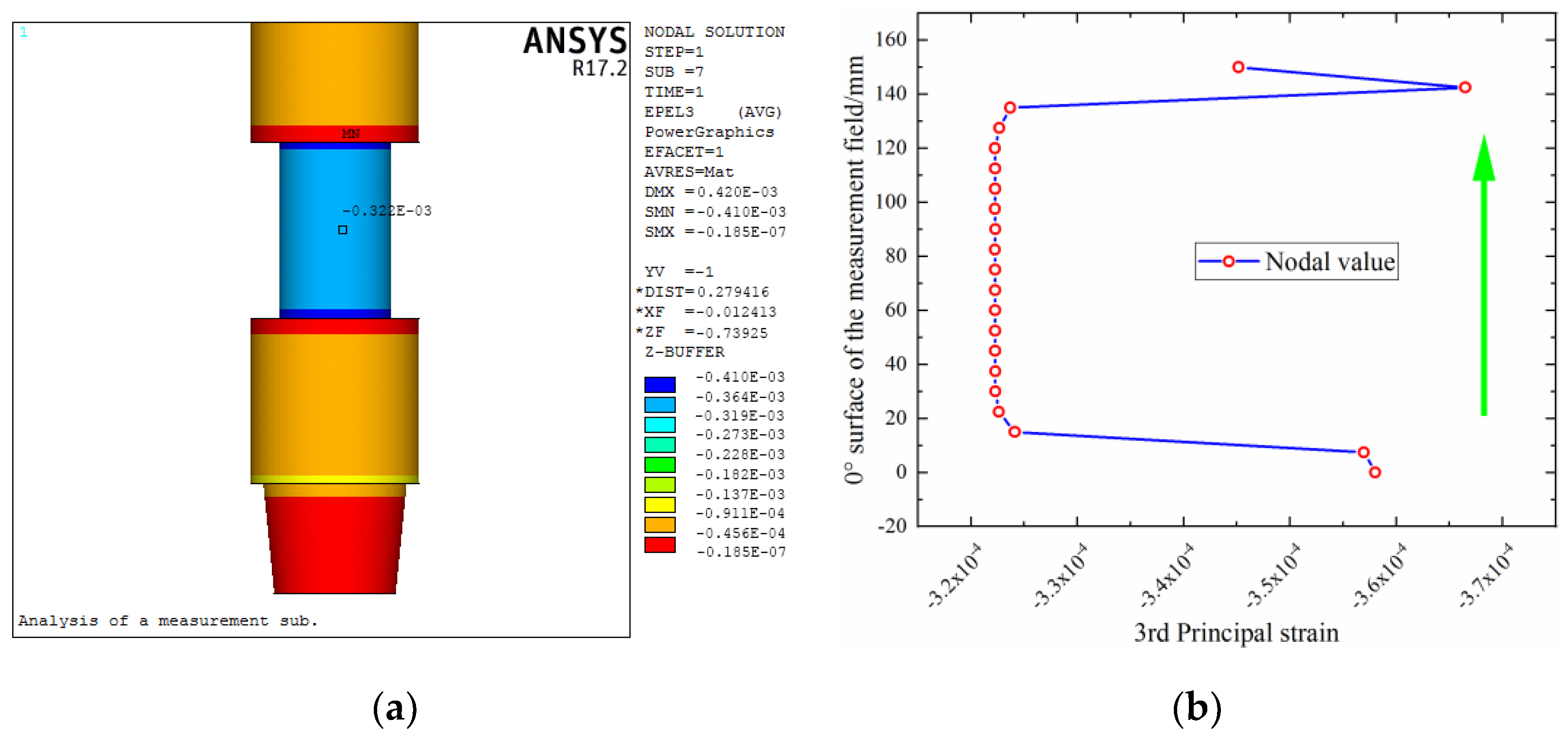
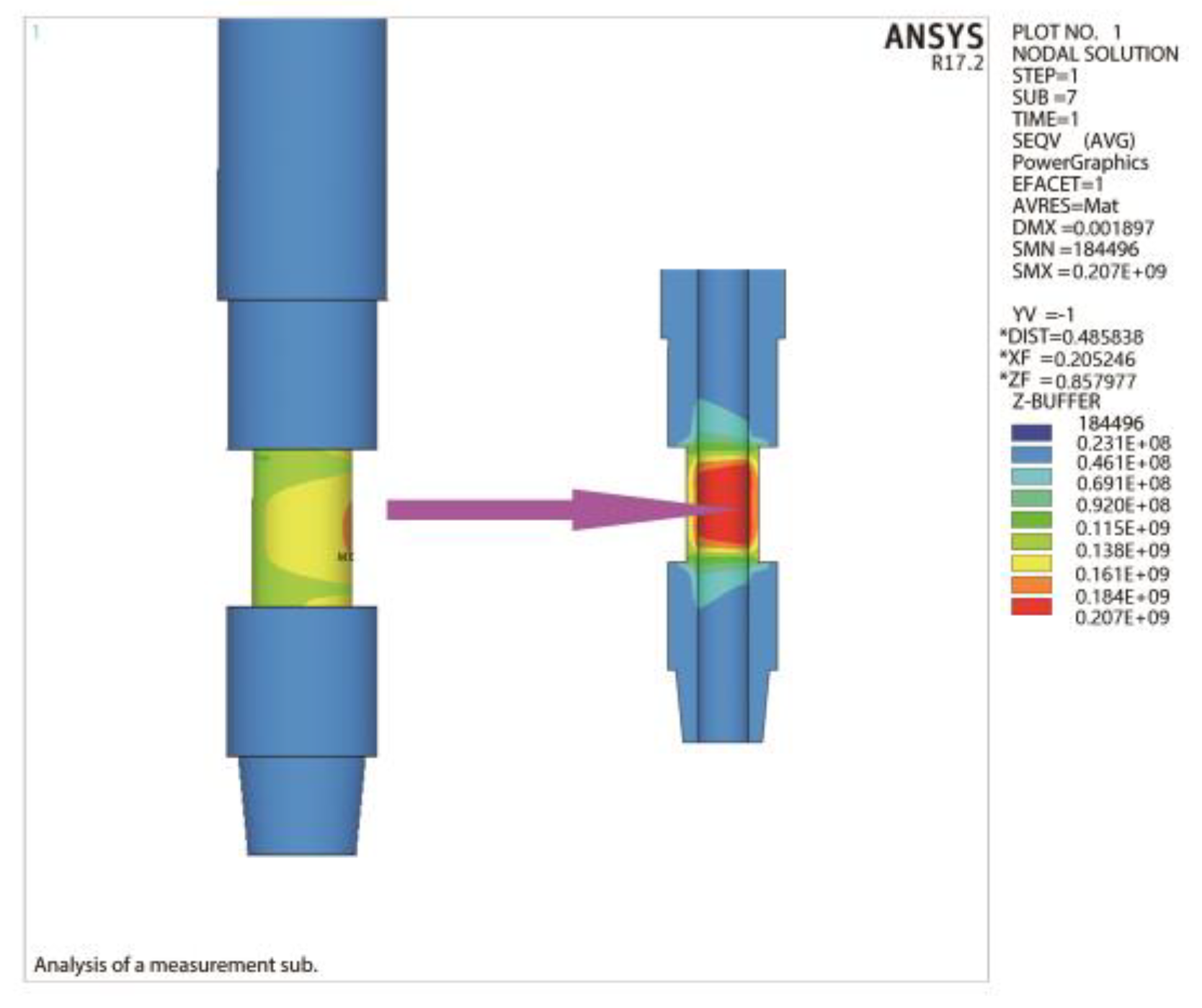
- The measurement performance and structural strength of the optimization results were verified based on the FEM. The maximum relative error between the simulation results and the theoretical values of the strain in the measurement area is within 5%, which verified the measurement reliability of the structure. For the maximum Mises stress of the elastic cell under the extreme measurement condition, the relative error between the simulated value and the theoretical value is also within 5%. This further validates the strength reliability of the structure. These two results indicate the effectiveness of the proposed optimization strategy.
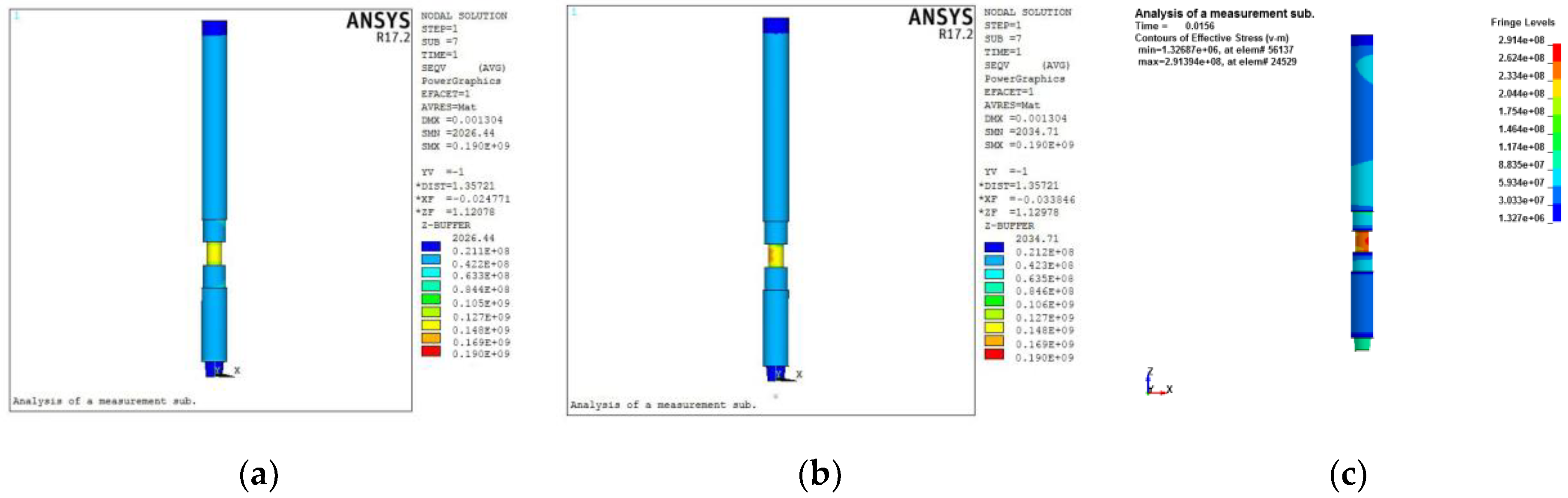
- It was proposed that transient dynamics analysis should be used to investigate the dynamic strength of the designed structure to improve the design. The transient dynamic models of the sub under two typical working conditions were established, and the dynamic response of the structure under the corresponding impact load was investigated. The current design could meet the strength requirements of these two working conditions. Nevertheless, the potential of dynamic analysis to provide design feedback should not be overlooked. Dynamic analysis should be incorporated into the entire design process.
Author Contributions
Funding
Conflicts of Interest
References
- Demirbas, A.; Bafail, A.; Zytoon, A.M.; Sayed, N.A. Unconventional energy sources: Safety impacts, opportunities, and economic challenges. Energy Sources Part B 2017, 12, 387–393. [Google Scholar] [CrossRef]
- AbdelMawla, A. Deciphering the Performance of Multi-Lateral and Extended Reach Wells for Reserves Evaluation in Unconventional Resource Plays. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, UAE, 12–15 November 2018. [Google Scholar]
- Gooneratne, C.; Li, B.; Moellendick, T. Downhole applications of magnetic sensors. Sensors 2017, 17, 2384. [Google Scholar] [CrossRef] [PubMed]
- Akimov, O.; Hohl, A.; Oueslati, H.; Reckmann, H. Evolution of Drilling Dynamics Measurement Systems. In Proceedings of the SPE/IADC Middle East Drilling Technology Conference and Exhibition, Abu Dhabi, UAE, 29–31 January 2018. [Google Scholar]
- Abimbola, M.; Khan, F. Development of an integrated tool for risk analysis of drilling operations. Process Saf. Environ. Prot. 2016, 102, 421–430. [Google Scholar] [CrossRef]
- Zalluhoglu, U.; Demirer, N.; Marck, J.; Gharib, H.; Darbe, R. Steering Advisory System for Rotary Steerable Systems. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, The Hague, The Netherlands, 5–7 March 2019. [Google Scholar]
- Zhang, C.; Zou, W.; Cheng, N. Overview of rotary steerable system and its control methods. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1559–1565. [Google Scholar]
- Ma, T.; Chen, P. Development and use of a downhole system for measuring drilling engineering parameters. Chem. Technol. Fuels Oils 2015, 51, 294–307. [Google Scholar]
- Liu, Y.; Ma, T.; Chen, P.; Yang, C. Method and apparatus for monitoring of downhole dynamic drag and torque of drill-string in horizontal wells. J. Pet. Sci. Eng. 2018, 164, 320–332. [Google Scholar] [CrossRef]
- Seyed Moosavi, S.; Moaveni, B.; Moshiri, B.; Arvan, M. Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems. Sensors 2018, 18, 702. [Google Scholar] [CrossRef] [PubMed]
- Cheng, L.; Tianhuai, D.; Peng, W. An experimental rig for near-bit force measurement and drillstring acoustic transmission of BHA. Measurement 2011, 44, 642–652. [Google Scholar] [CrossRef]
- Hu, Z.; Xie, X.; Ge, L.; Chen, P.; Li, J.; Zeng, Q. Research on the System of Down-Hole Engineering Parameters Measure while Drilling. Open Pet. Eng. J. 2014, 7, 149–153. [Google Scholar]
- Liu, J.; Zhao, H.; Liu, X.; Liu, Q.; Xiao, G.; Song, X. Experimental study on the mechanical responses of downhole tools in highly-deviated waterflooding well. J. Pet. Sci. Eng. 2018, 171, 495–506. [Google Scholar]
- Wang, C.; Liu, G.; Li, J.; Zhang, T.; Jiang, H.; Ling, X.; Ren, K. New methods of eliminating downhole WOB measurement error owing to temperature variation and well pressure differential. J. Pet. Sci. Eng. 2018, 171, 1420–1432. [Google Scholar] [CrossRef]
- Xu, X.; Meng, Y.; Liu, Y.; Ji, Y. A study on weight-on-bit data correction method of a near-bit measuring tool. Adv. Mech. Eng. 2019, 11, 1687814018821518. [Google Scholar] [CrossRef]
- Ji, X.; Deng, X.; Lu, Y. Engineering Experimental Mechanics, 2nd ed.; China Machine Press: Beijing, China, 2010. [Google Scholar]
- Wang, Y.; Yang, J.; Han, L.; Zhang, H. Signal Processing of Near-Bit Weight on Bit and Torque. Pet. Drill. Tech. 2009, 37, 73–75. [Google Scholar]
- Zhang, J. The Study and Design on MWD Collection Joint of Downhole Engineerning Parameters. Master’s Thesis, China University of Petroleum, Qingdao, China, 2009. [Google Scholar]
- Geng, Y.; Zhang, H.; Hua, C.; Cui, H. Structural design and error analysis of a device for measuring drilling engineering parameters near the bit. J. Electron. Meas. Instrum. 2010, 24, 454–459. [Google Scholar] [CrossRef]
- Fan, R.; Luo, J. The application of thin-film sputtering technology in downhole TOR & WOB measurement. China Pet. Mach. 2009, 37, 24–27. [Google Scholar]
- Du, Y.; Sun, B.; Li, J.; Zhang, W. Optical Fiber Sensing and Structural Health Monitoring Technology; Springer: Singapore, 2019. [Google Scholar]
- Sun, Y. A Design of High Frequency Three-Dimensional Dynamometer and Experimental Study for High Speed Milling. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2012. [Google Scholar]
- Zamani, S.M.; Hassanzadeh-Tabrizi, S.A.; Sharifi, H. Failure analysis of drill pipe: A review. Eng. Fail. Anal. 2016, 59, 605–623. [Google Scholar] [CrossRef]
- Lin, Y.; Qi, X.; Zhu, D.; Zeng, D.; Zhu, H.; Deng, K.; Shi, T. Failure analysis and appropriate design of drill pipe upset transition area. Eng. Fail. Anal. 2013, 31, 255–267. [Google Scholar] [CrossRef]
- Fan, R.; Xie, S. Design of the structural parameter of the near-bit drilling pressure and torque’s measurement sub. China Pet. Mach. 2010, 38, 17–19. [Google Scholar]
- Luo, J. Research on Apparatus Used for Measurement of Engineering Parameters in Wall Drilling. Master’s Thesis, Beihang University, Beijing, China, 2008. [Google Scholar]
- Deily, F.; Dareing, D.; Paff, G.; Ortloff, J.; Lynn, R. Downhole measurements of drill string forces and motions. J. Eng. Ind. 1968, 90, 217–225. [Google Scholar] [CrossRef]
- Gross, D.; Ehlers, W.; Wriggers, P.; Schröder, J.; Müller, R. Mechanics of Materials—Formulas and Problems; Springer: Berlin/Heidelberg, Germany, 2017; Volume 2, pp. 2–113. [Google Scholar]
- Cui, X.; Guan, Z.; Han, Z.; Chen, Y.; Sun, C. Structural design and manufacturing of machinery for measuring joint of drill rod. J. Mach. Des. 2002, 3, 30–32. [Google Scholar]
- Ma, T.; Chen, P.; He, Y.; Huang, W.; Hu, Z. Design and manufacturing of measurement sub for downhole engineering parameters. Mach. Des. Manuf. 2011, 11, 23–25. [Google Scholar]
- Sun, Z. Study and Design on Sensor Systems and Sensor Calibration Device of Downhole WOB Torque Measurement. Master’s Thesis, China University of Petroleum, Qingdao, China, 2010. [Google Scholar]
- Byrom, T.G. Casing and Liners for Drilling and Completion: Design and Application; Elsevier: Amsterdam, The Netherlands, 2014; pp. 148–153. [Google Scholar]
- Li, R.; Chen, Y.; Tan, Y.; Zhou, Z.; Li, T.; Mao, J. Sensitivity enhancement of FBG-based strain sensor. Sensors 2018, 18, 1607. [Google Scholar] [CrossRef] [PubMed]
- Denison, E.B. Steering Drill String. 4,324,297. 1982. Available online: https://patents.google.com/patent/US4324297A/en (accessed on 20 December 2018).
- Geng, Y.; Yang, J.; Yan, Z.; Hua, C.; Liu, B. Measurement Techniques for Drilling Engineering Parameters near the Bit Based on Resistance Strain Gauges. J. Transduct. Technol. 2008, 6, 1084–1088. [Google Scholar]
- Shi, Y.; Reitz, R.D. Assessment of multiobjective genetic algorithms with different niching strategies and regression methods for engine optimization and design. J. Eng. Gas Turbines Power 2010, 132, 052801. [Google Scholar] [CrossRef]
- Camara, M.V.O.; Ribeiro, G.M.; Tosta, M.d.C.R. A pareto optimal study for the multi-objective oil platform location problem with NSGA-II. J. Pet. Sci. Eng. 2018, 169, 258–268. [Google Scholar] [CrossRef]
- Lin, S. NGPM—A NSGA-II Program in Matlab v1. 4. File Exchange at MATLAB CENTRAL. Available online: http://www. mathworks. com/matlabcentral/fileexchange/31166 (accessed on 2 November 2018).
- Wang, B.; Liang, Y.; Zheng, T.; Yuan, M.; Zhang, H. Multi-objective site selection optimization of the gas-gathering station using NSGA-II. Process Saf. Environ. Prot. 2018, 119, 350–359. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y.; Zou, T.; Jin, M.; Liu, H. Design and optimization of a novel six-axis force/torque sensor for space robot. Measurement 2015, 65, 135–148. [Google Scholar] [CrossRef]
- Albdiry, M.; Almensory, M. Failure analysis of drillstring in petroleum industry: A review. Eng. Fail. Anal. 2016, 65, 74–85. [Google Scholar] [CrossRef]
- Ansys Inc. Ansys User’s Mannual, Release 17.0. Available online: https://www.sharcnet.ca/Software/Ansys/17.0/en-us/help/ans_lsd/Hlp_L_eiseq.html (accessed on 1 January 2019).
- Zhu, X.; Jia, Y. Research progress and application of drill string dynamics. In Proceedings of the International Conference Functional Manufacturing Mechanical Dynamics, Hangzhou, China, 29–31 July 2011; pp. 149–159. [Google Scholar]
- Yang, J. The Research on the Effect of Impact Load on Drill-string Failure in Air Drilling. Master’s Thesis, Southwest Petroleum University, Sichuan, China, 2008. [Google Scholar]
- Gao, H. The Vibration Research and Analysis on the Important Component of the Logging While Drilling apparatus. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2011. [Google Scholar]
- Li, K. Research on the Mechanical Components Fatigue Design Method and Its Application Under Impact Load. Master’s Thesis, HeFei University of Technology, Hefei, China, 2013. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loads | Sensitivities | Stiffnesses |
|---|---|---|
| WOB, P | ||
| Torque, T | ||
| Bending moment, M |
| Combination No. | Crossover Rate | Mutation Rate |
|---|---|---|
| Combination 1 | 0.8 | 0.1 |
| Combination 2 | 0.8 | 0.3 |
| Combination 3 | 0.9 | 0.1 |
| Combination 4 | 0.9 | 0.3 |
| Designs | Structural Parameters | Sensitivities | Stiffnesses | Strength Indices | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| d mm | t mm | L mm | SP/10−3 με/N | ST/10−2 με/Nm | SM/10−2 με/Nm | KP/109 N/rad | KT/106 Nm/rad | KM/107 Nm/rad | σemax/MPa | fmin | |
| 1 | 77 | 21 | 160 | 0.74 | 4.49 | 1.14 | 8.44 | 8.28 | 3.25 | 164 | 5.68 |
| 152 | 10 | - | - | - | - | - | - | - | 336 | 2.77 | |
| 2 | 71 | 15 | 160 | 1.18 | 8.02 | 1.17 | 5.29 | 3.94 | 2.69 | 218 | 4.27 |
| 152 | 10 | - | - | - | - | - | - | - | 340 | 2.74 | |
| 3 | 48 | 17 | 160 | 1.38 | 16.53 | 1.05 | 4.53 | 1.30 | 2.44 | 203 | 4.58 |
| 152 | 10 | - | - | - | - | - | - | - | 342 | 2.72 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Yan, Y.; Yan, X.; Zhao, L. Structural Parameters Optimization of Elastic Cell in a Near-Bit Drilling Engineering Parameters Measurement Sub. Sensors 2019, 19, 3343. https://doi.org/10.3390/s19153343
Zhao L, Yan Y, Yan X, Zhao L. Structural Parameters Optimization of Elastic Cell in a Near-Bit Drilling Engineering Parameters Measurement Sub. Sensors. 2019; 19(15):3343. https://doi.org/10.3390/s19153343
Chicago/Turabian StyleZhao, Long, Yifei Yan, Xiangzhen Yan, and Lei Zhao. 2019. "Structural Parameters Optimization of Elastic Cell in a Near-Bit Drilling Engineering Parameters Measurement Sub" Sensors 19, no. 15: 3343. https://doi.org/10.3390/s19153343
APA StyleZhao, L., Yan, Y., Yan, X., & Zhao, L. (2019). Structural Parameters Optimization of Elastic Cell in a Near-Bit Drilling Engineering Parameters Measurement Sub. Sensors, 19(15), 3343. https://doi.org/10.3390/s19153343