Capture Point-Based Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modifiable Walking Pattern Generator
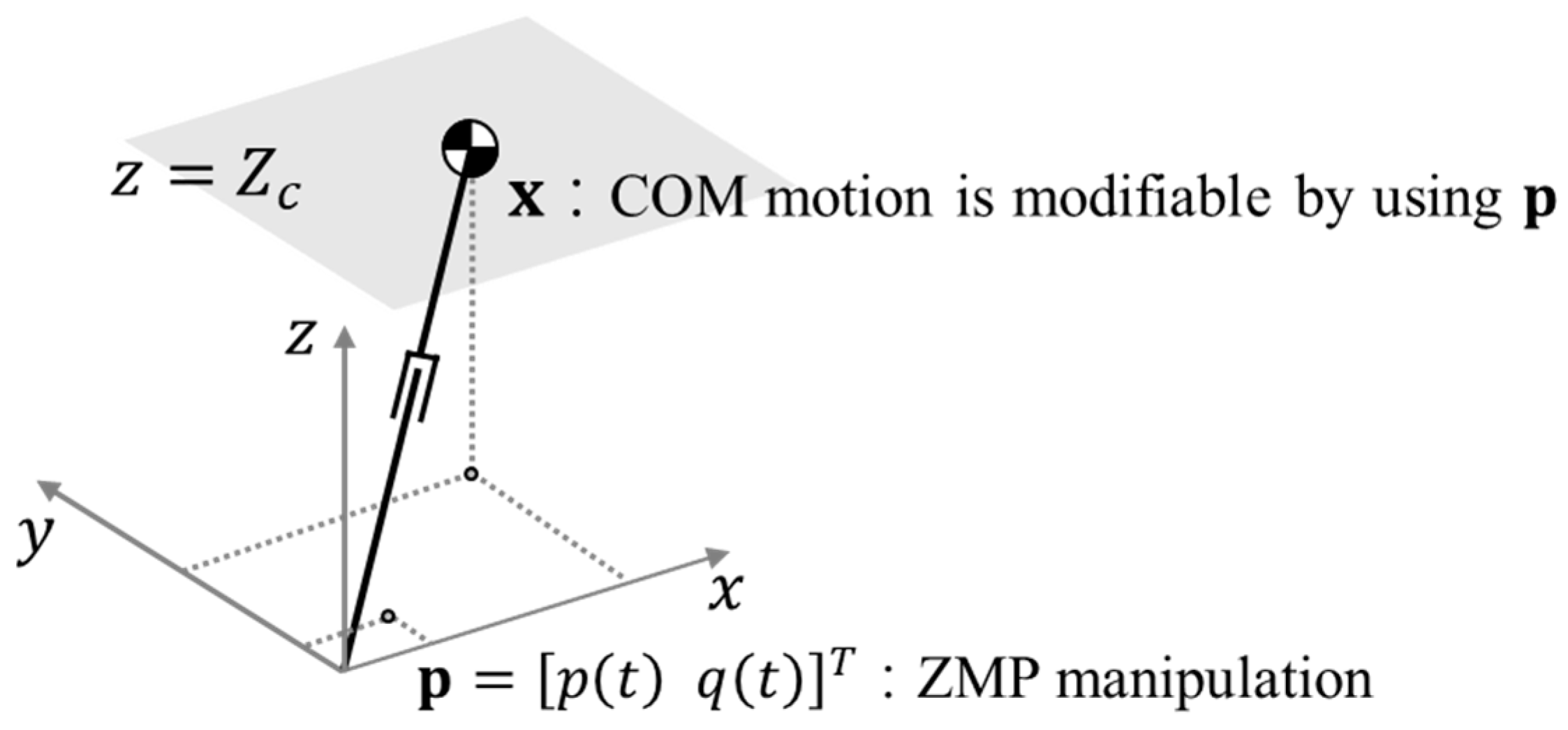
2.1. COM Motion of 3-D LIPM
2.2. Desired Walking State from Command State
3. CP-Based Stability Control Method for Dynamically Modifiable Walking
3.1. CP Dynamics
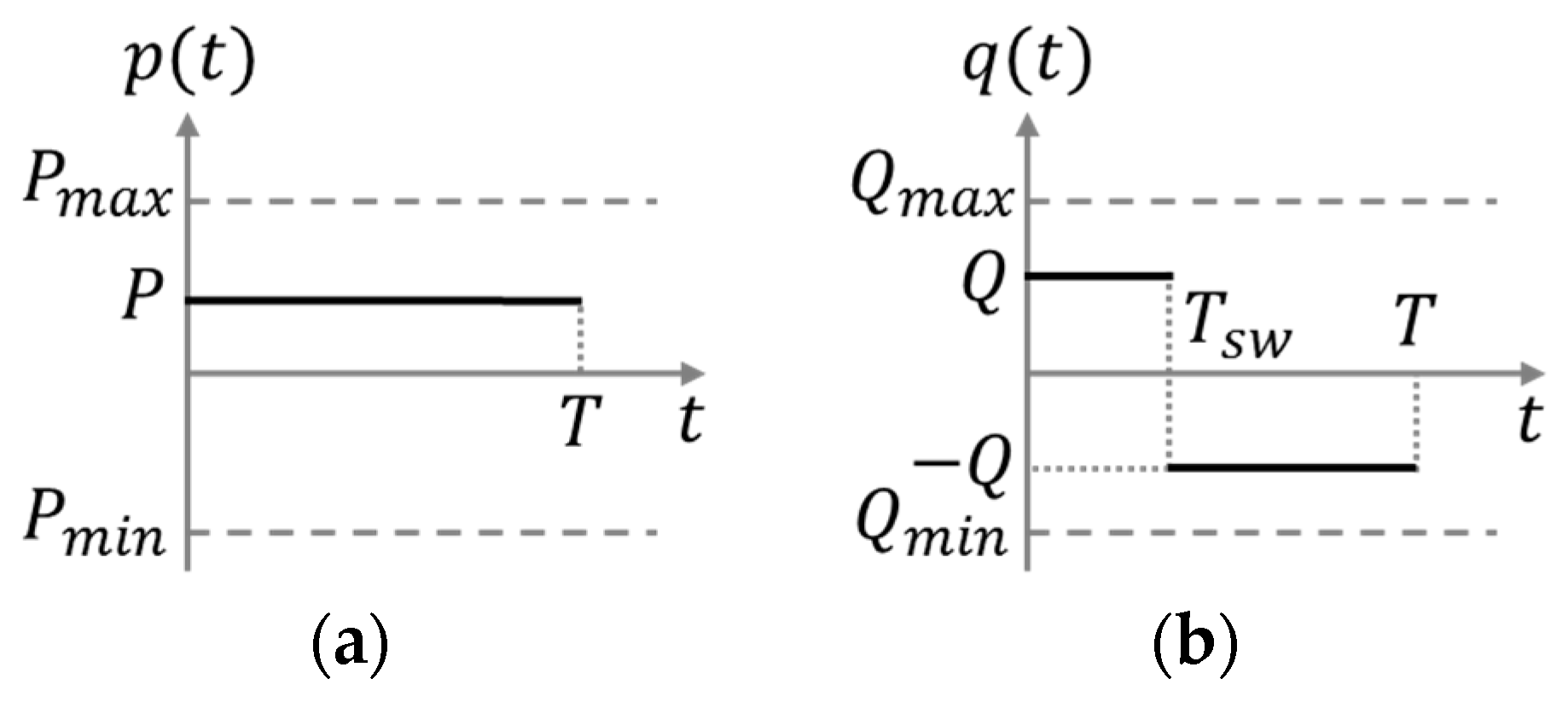
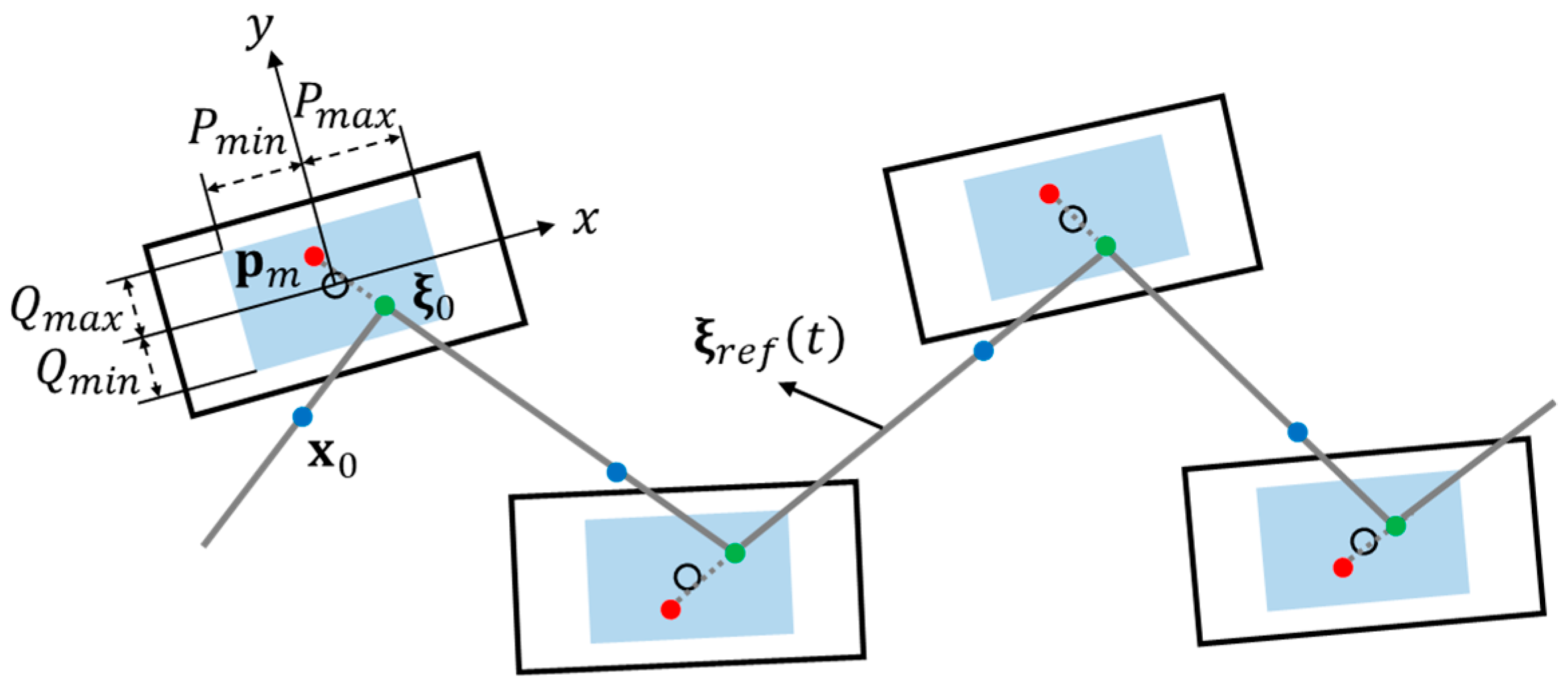
3.2. Reference CP Trajectory Generation in Single Support Phase Using Real-Time ZMP Manipulation
3.3. Reference CP Trajectory Generation in Double Support Phase
3.4. CP Tracking Control
3.5. Handling Infeasible Command States and the Corresponding Desired Walking States
| Algorithm 1. Handling infeasible command states and desired walking states. |
| /* initialization */ |
| /* start binary search algorithm */ |
| while do |
| if is feasible then |
| break; |
| else |
| end if |
| end while |
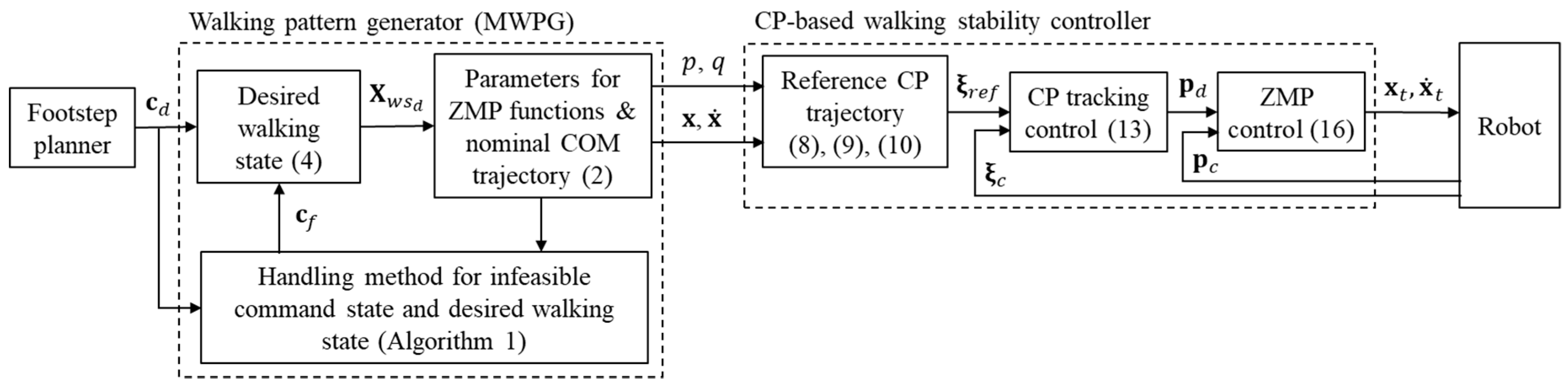
3.6. Overall Procedure
4. Experimental Results and Discussion
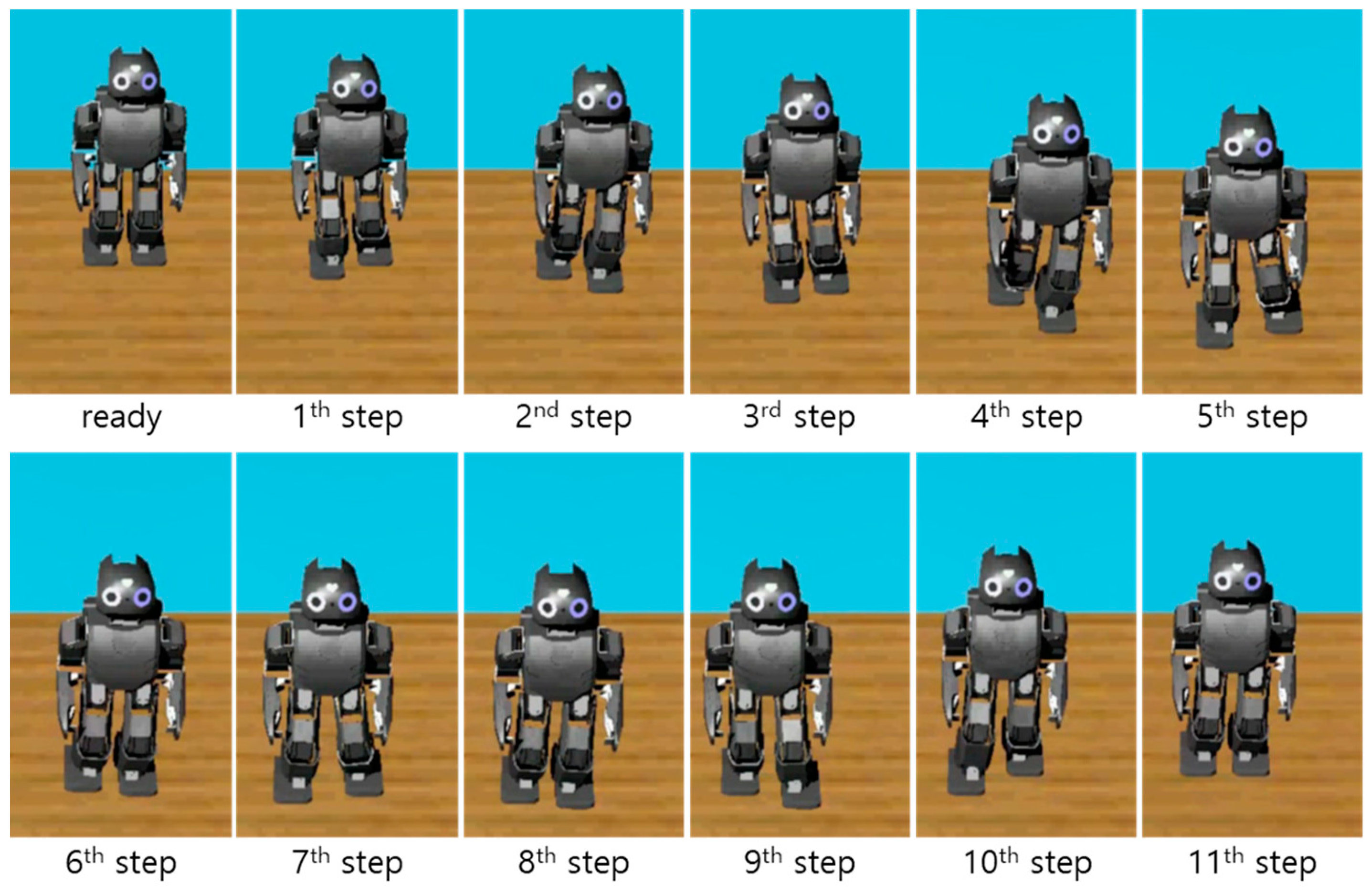
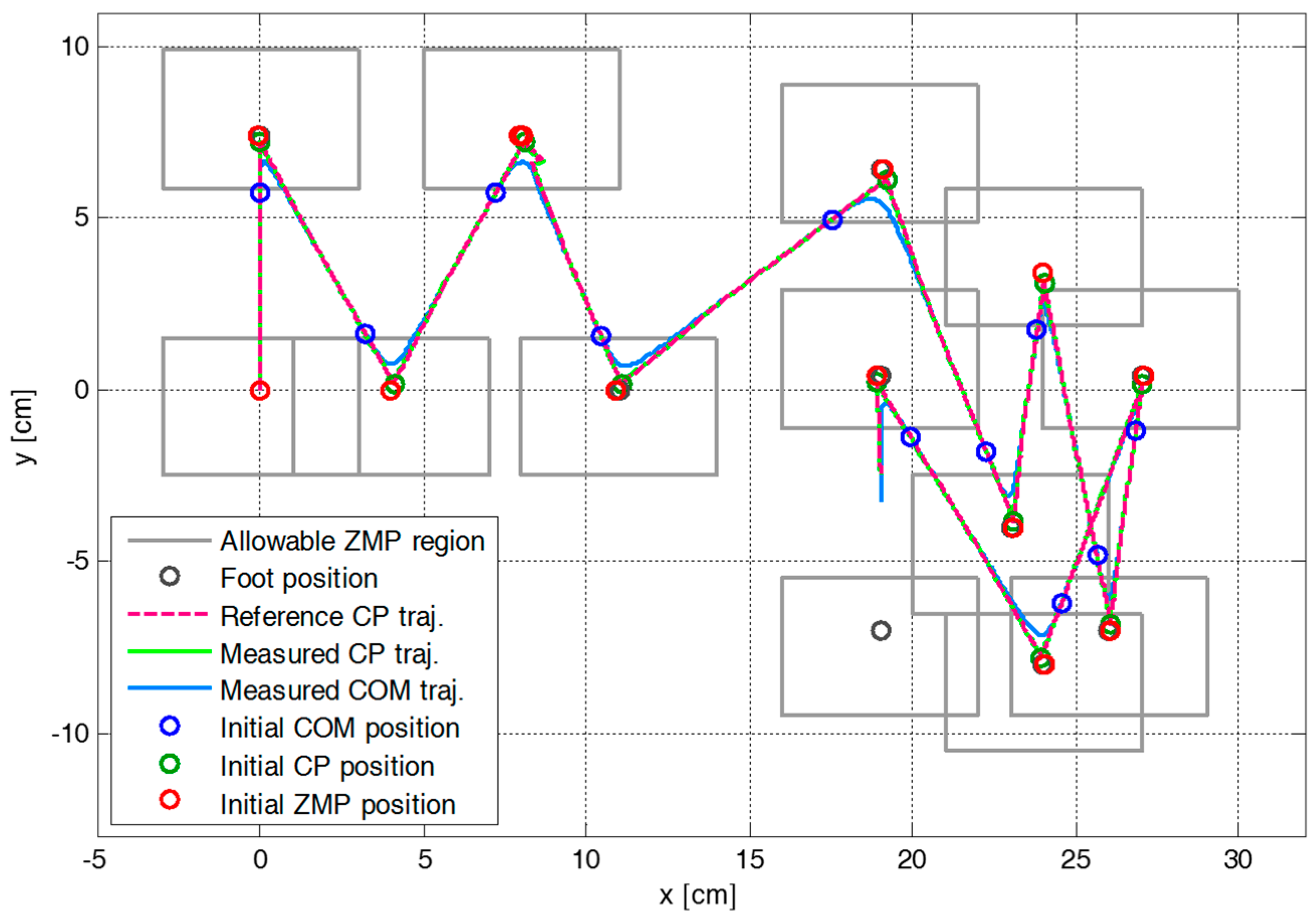
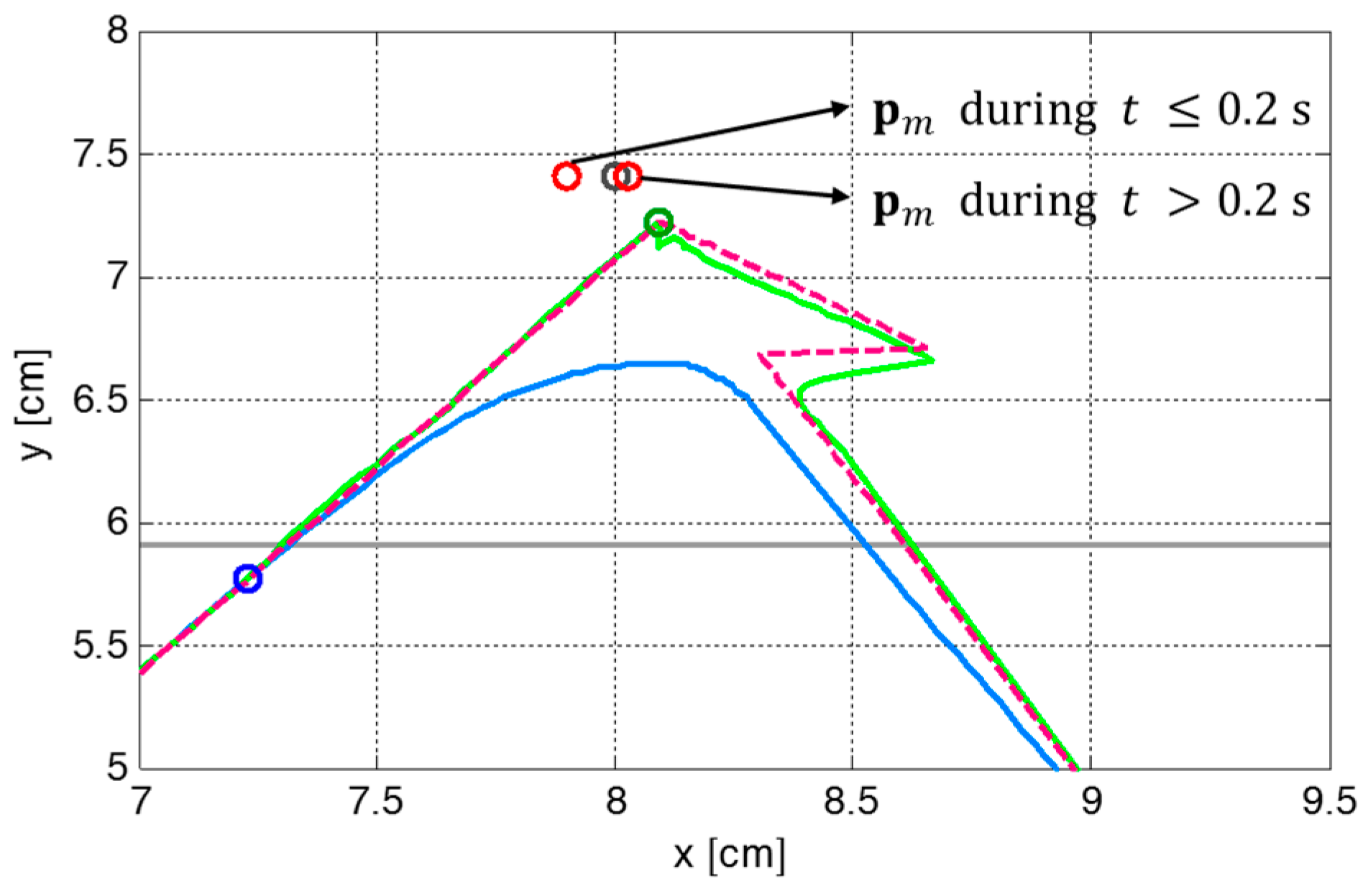
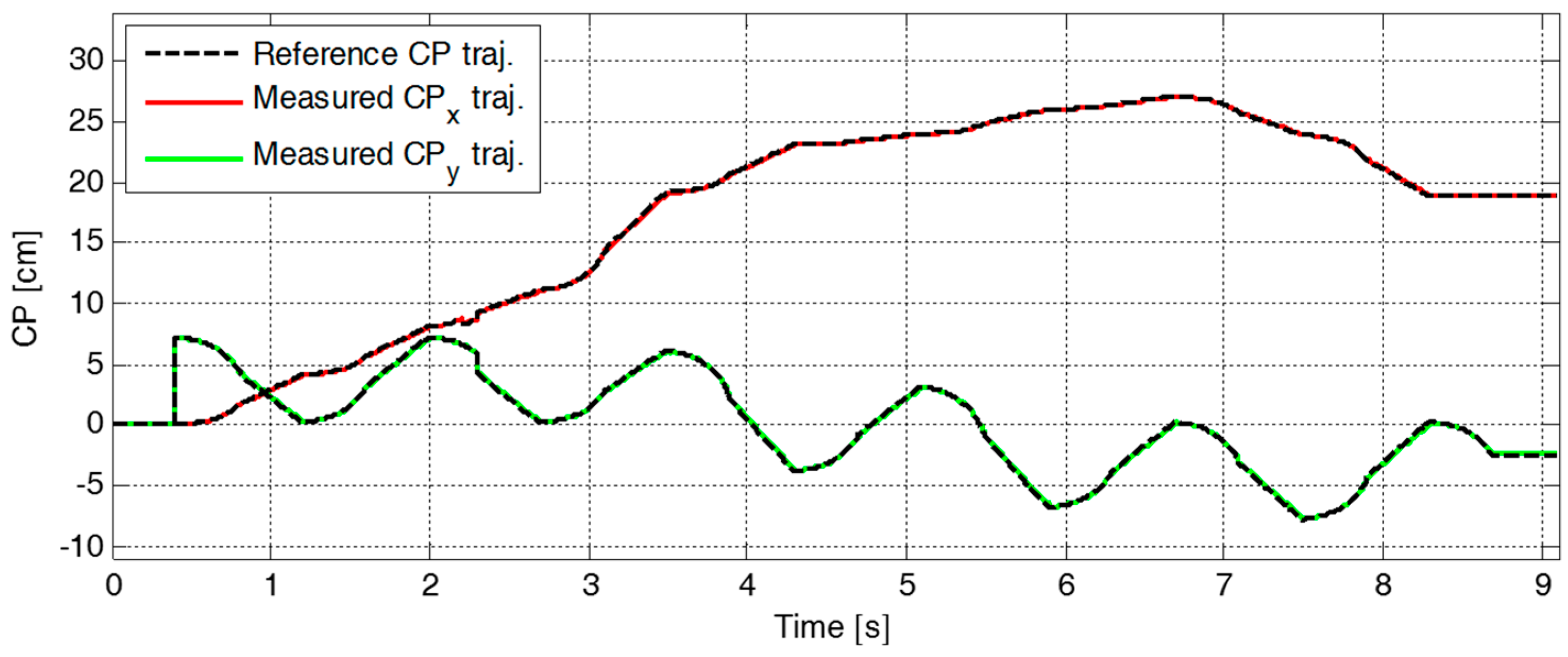
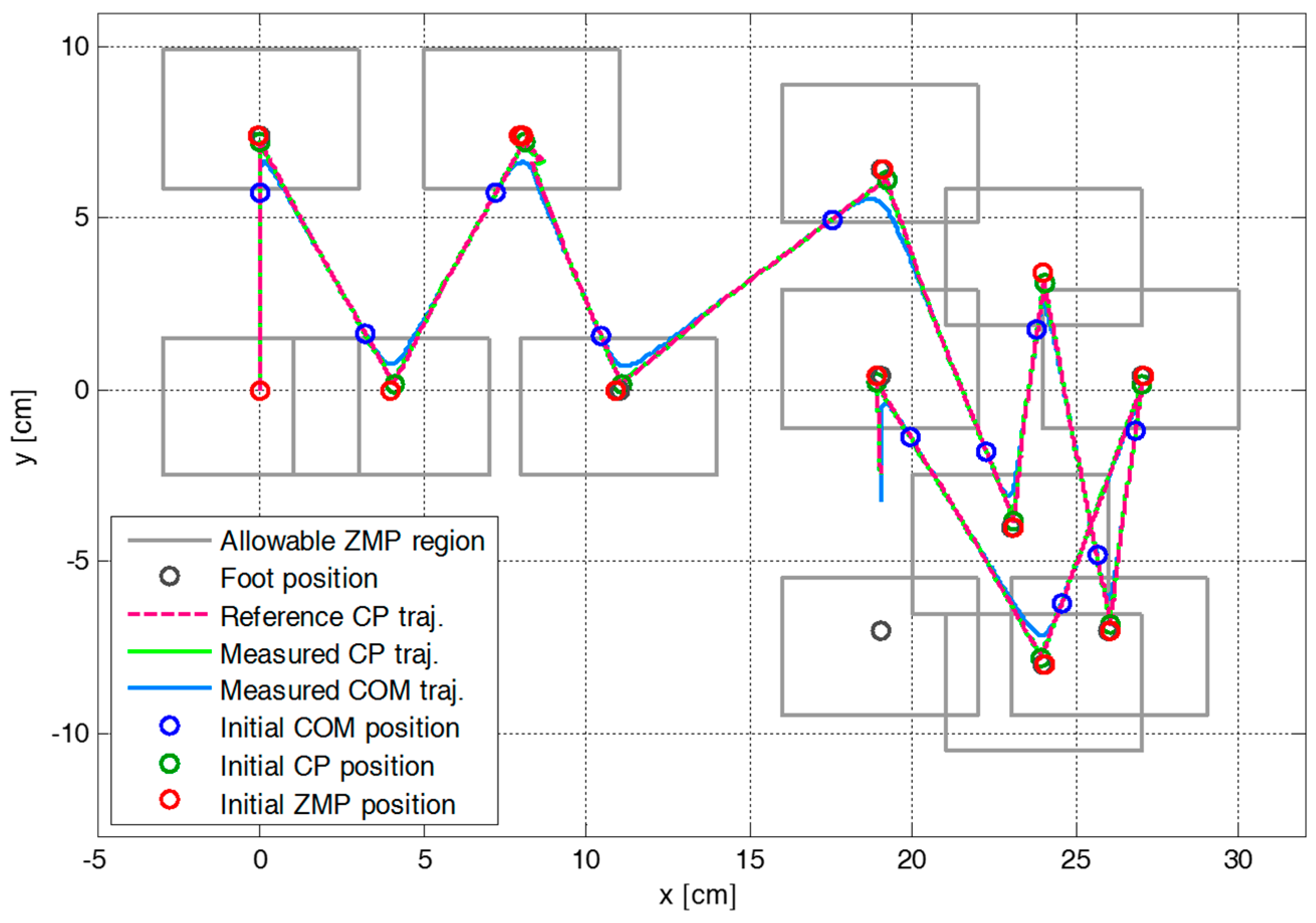
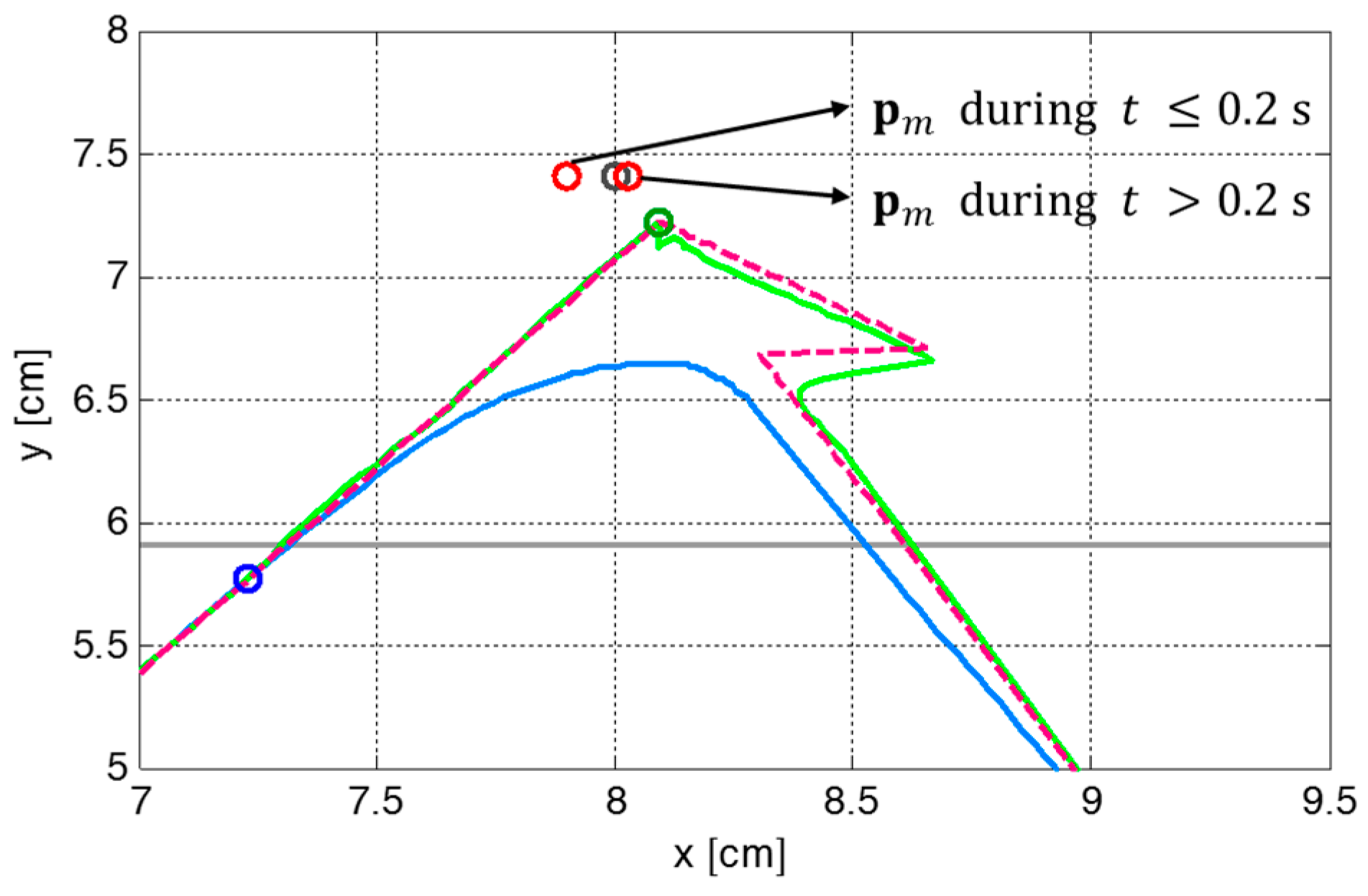
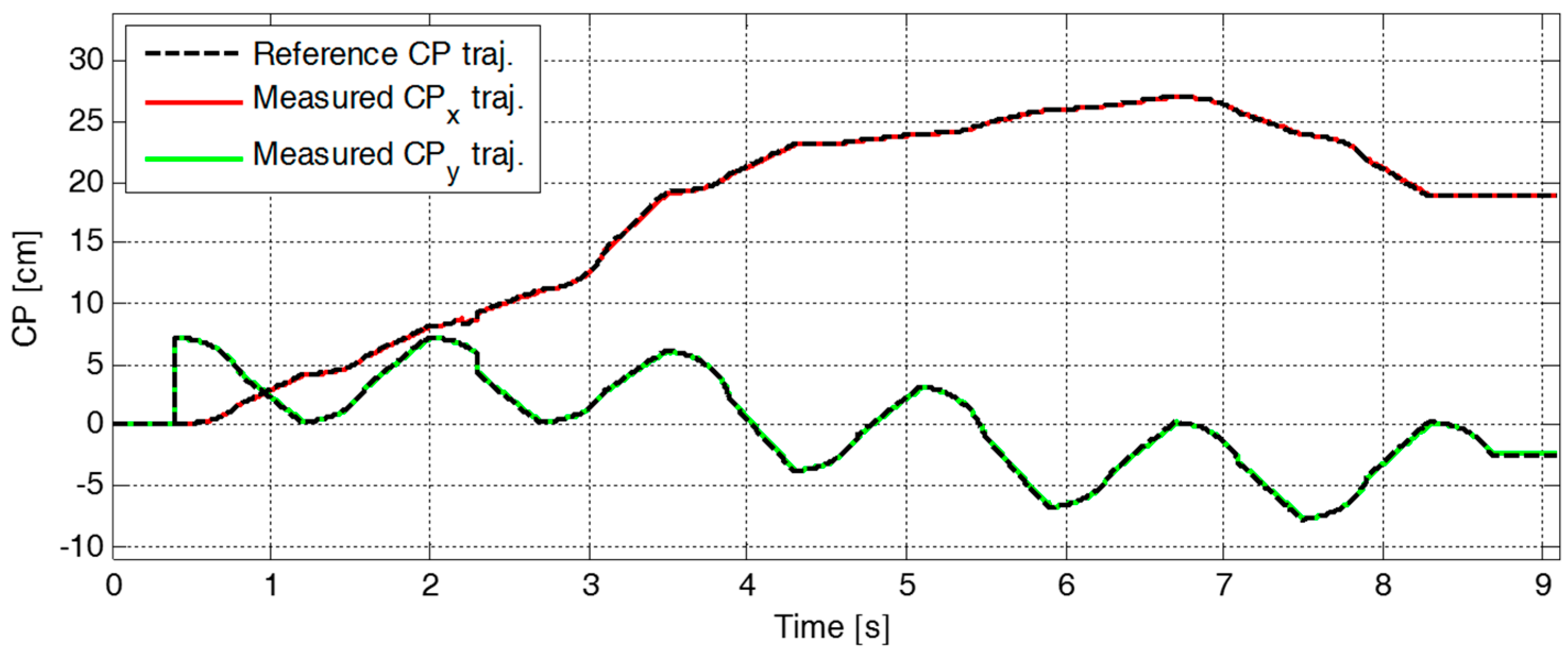
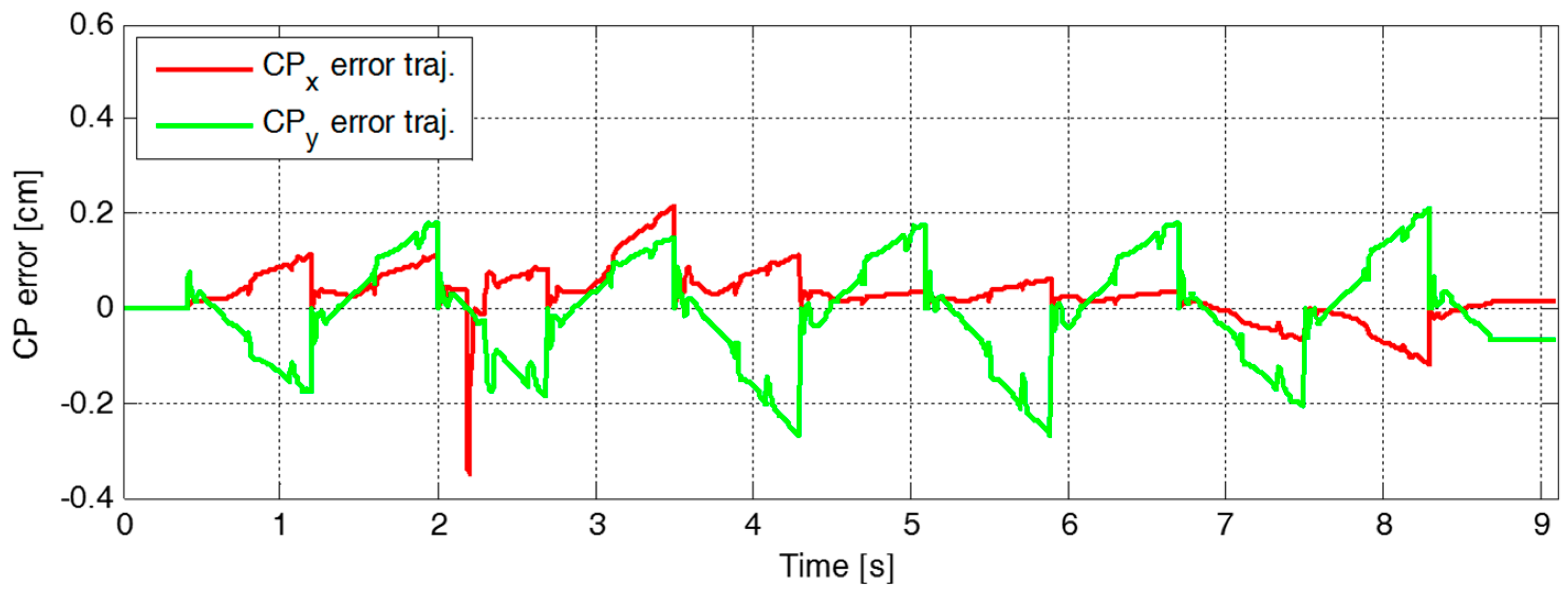
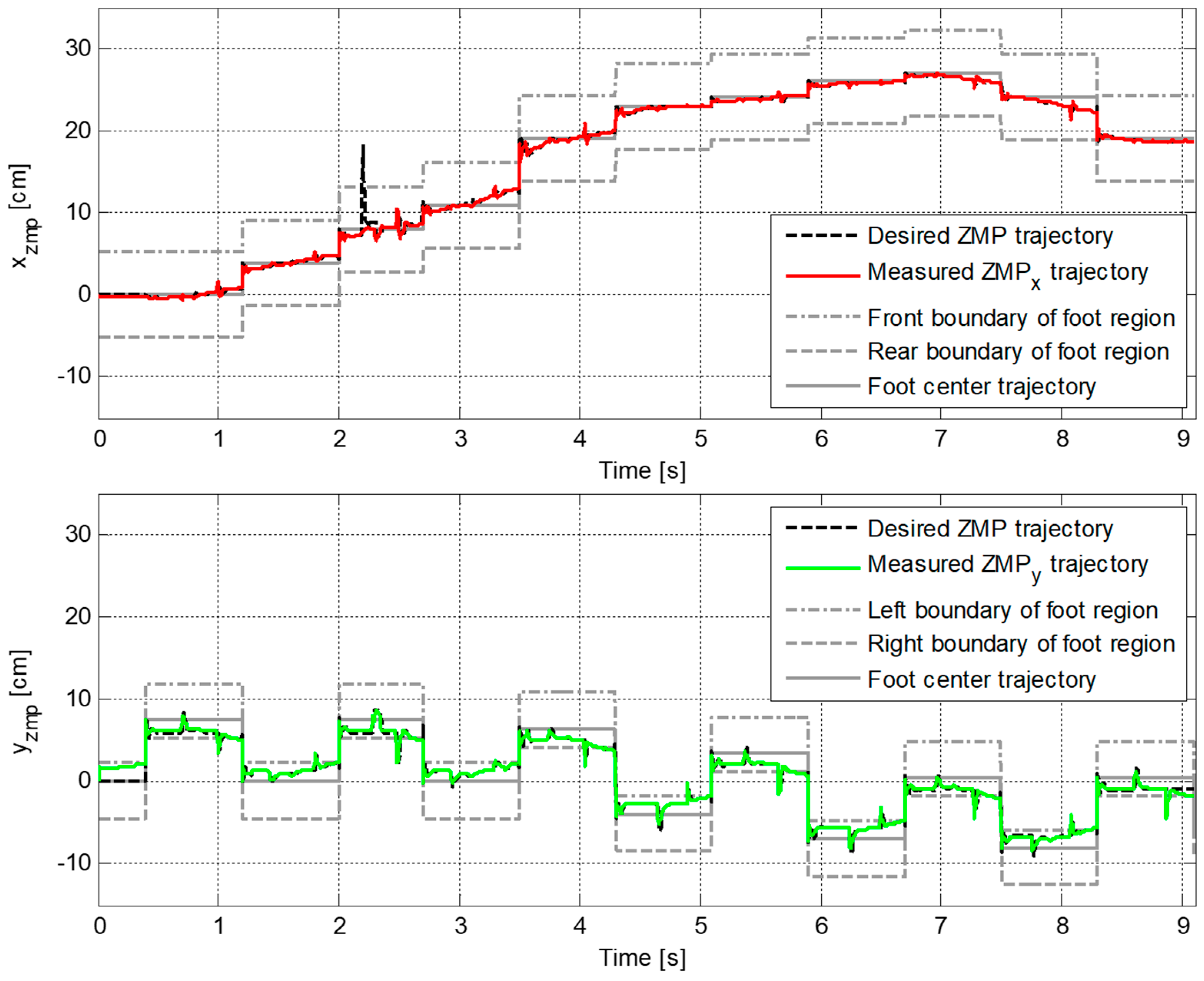
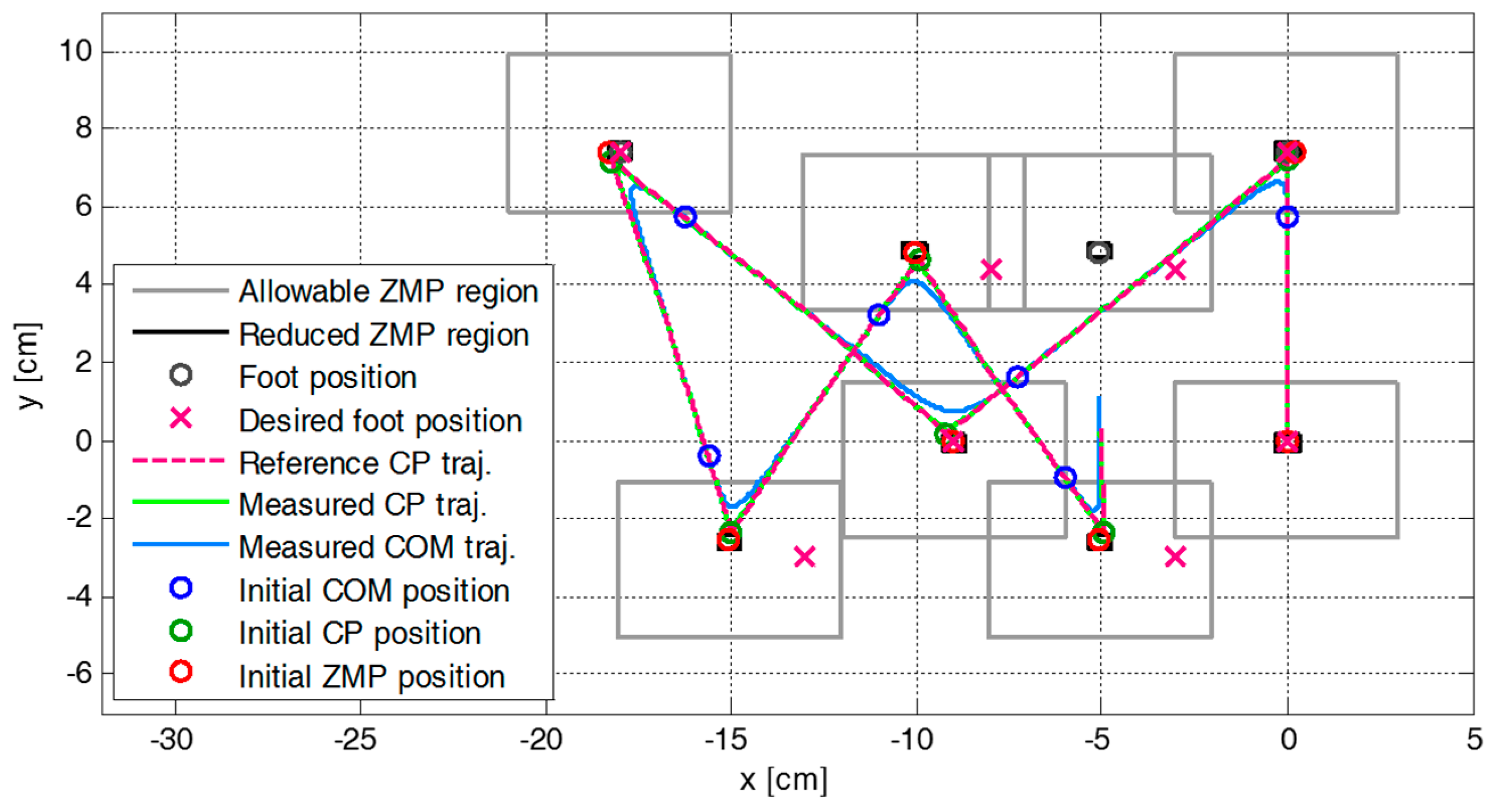
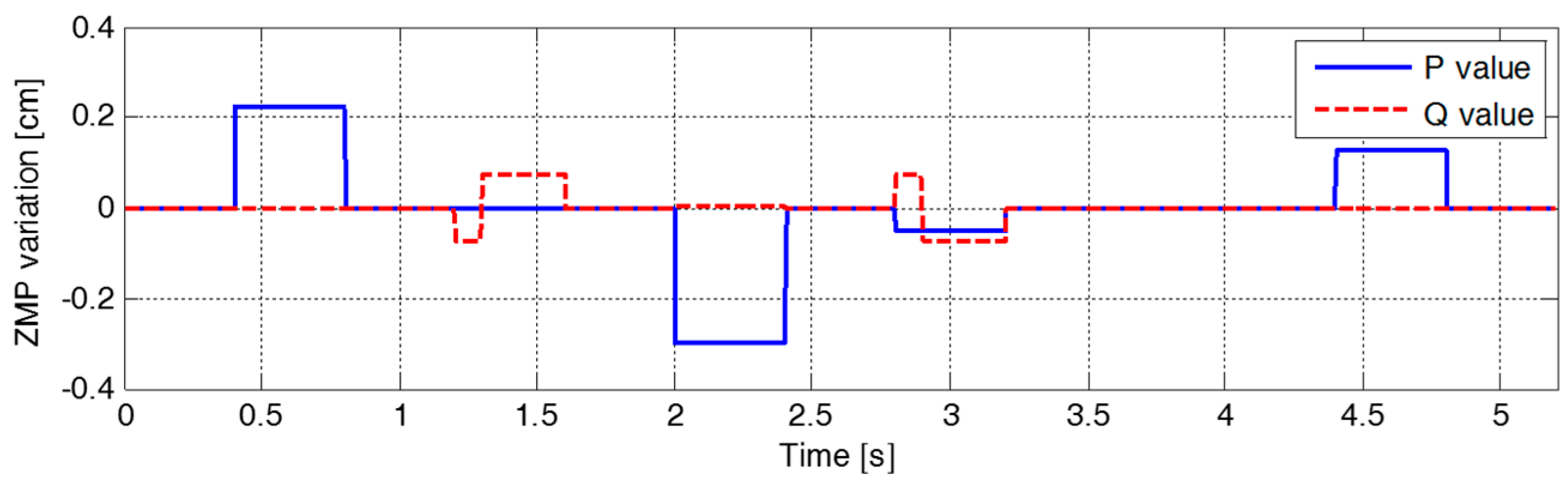
4.1. Simulation Results
- (1)
- Initial command state,
- (2)
- After 2nd step,
- (2-1)
- After at 3rd step,
- (3)
- After 3rd step,
- (4)
- After 4th step,
- (5)
- After 5th step,
- (6)
- After 6th step,
- (7)
- After 7th step,
- (8)
- After 8th step,
- (9)
- After 9th step,
- (10)
- After 10th step,
- (1)
- Initial command state,
- (2)
- After 1st step,
- (3)
- After 2nd step,
- (4)
- After 3rd step,
- (5)
- After 5th step,
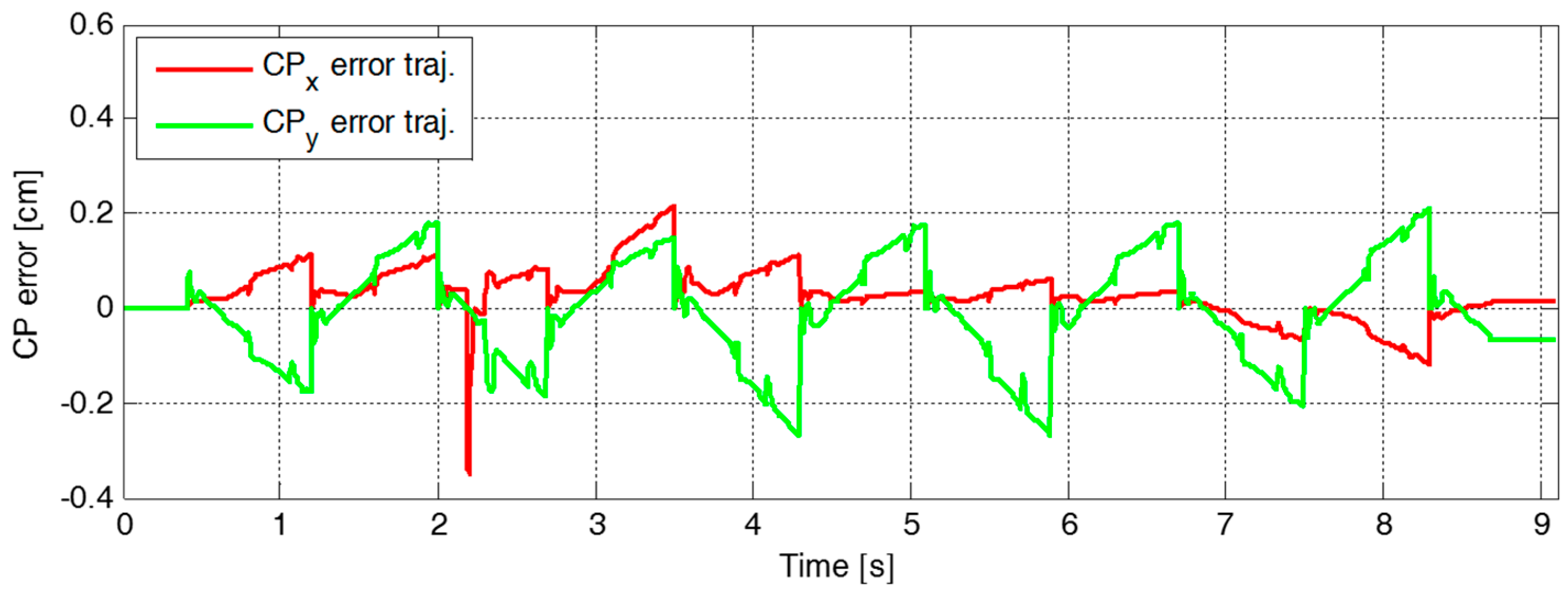
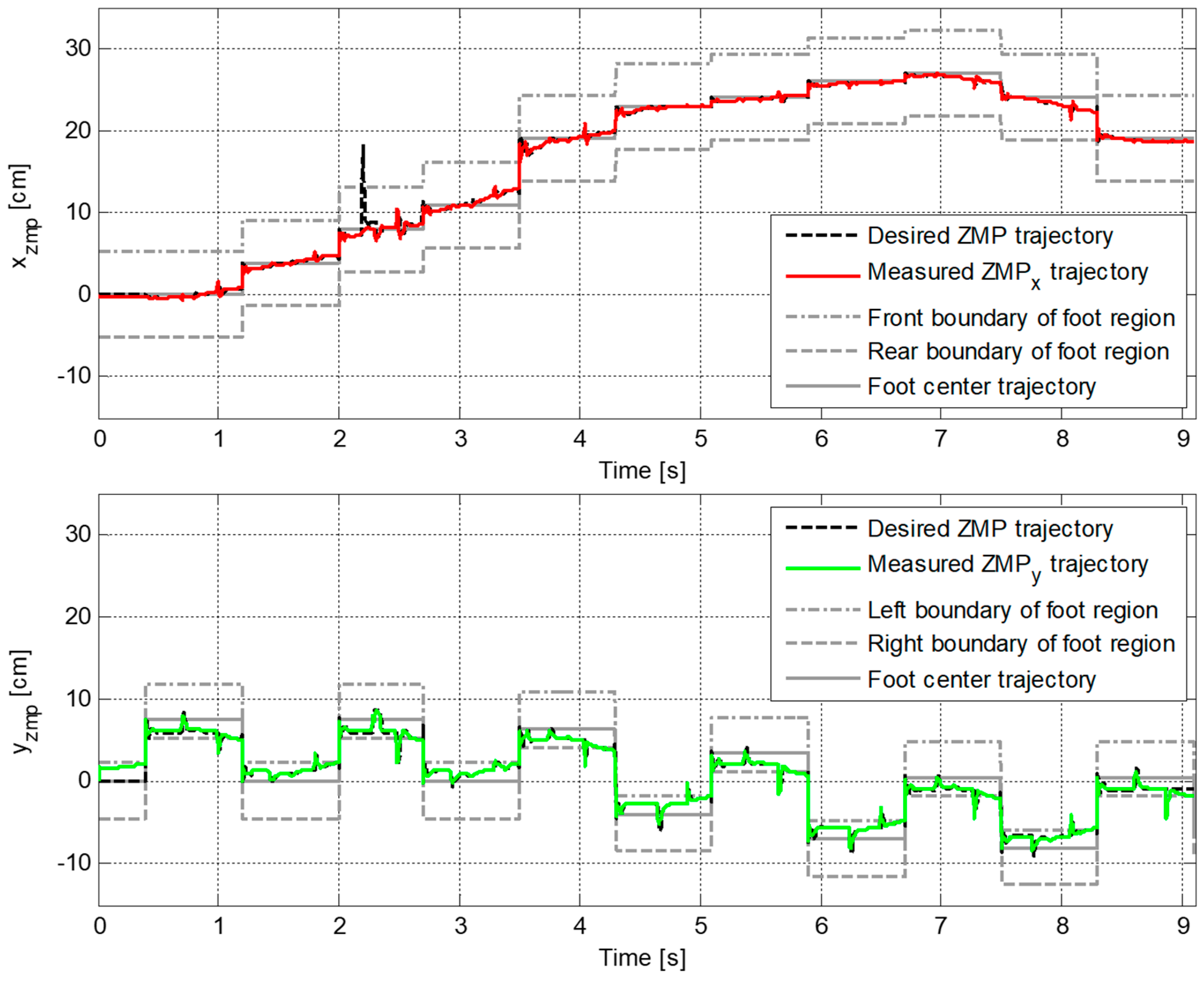
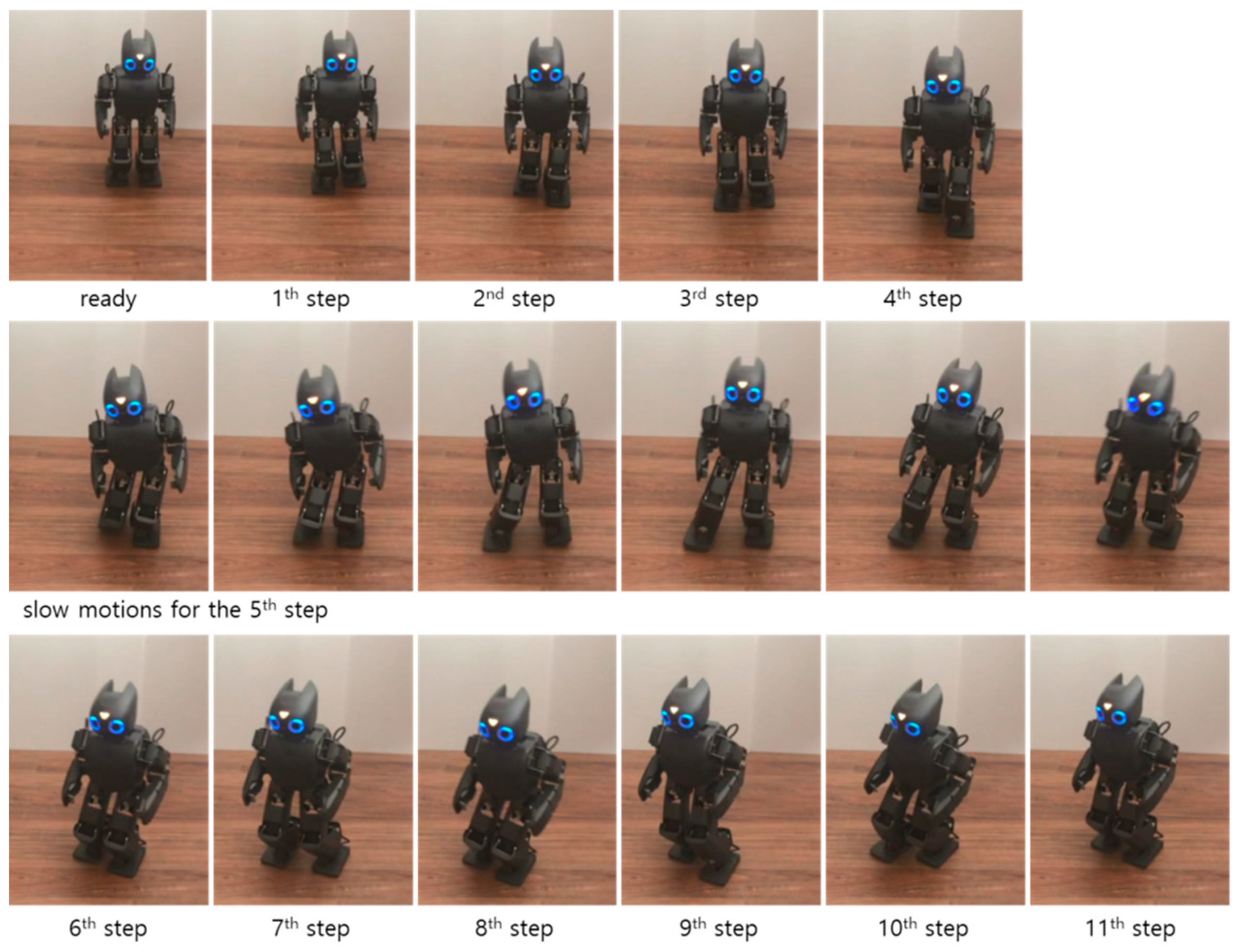
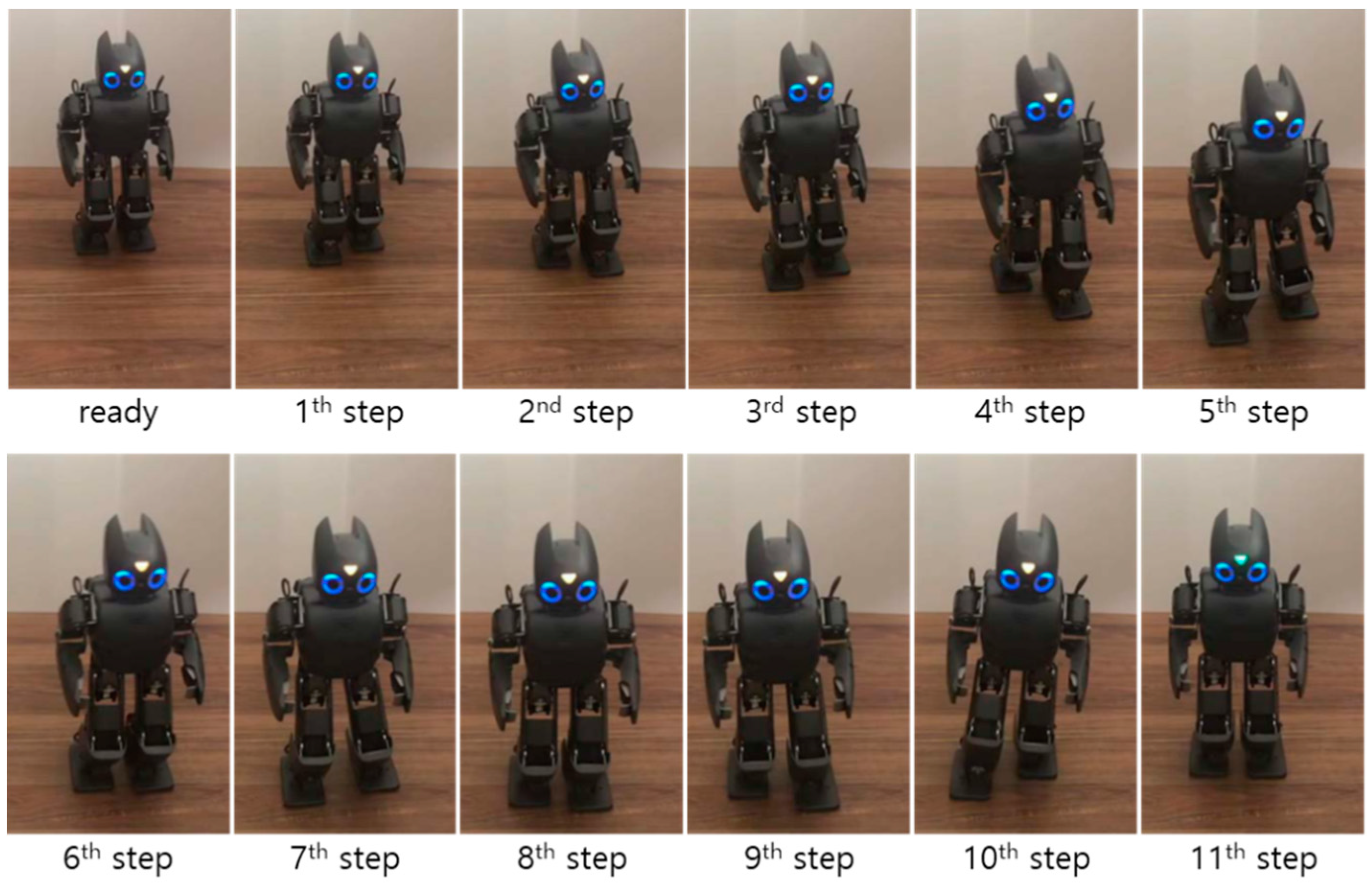
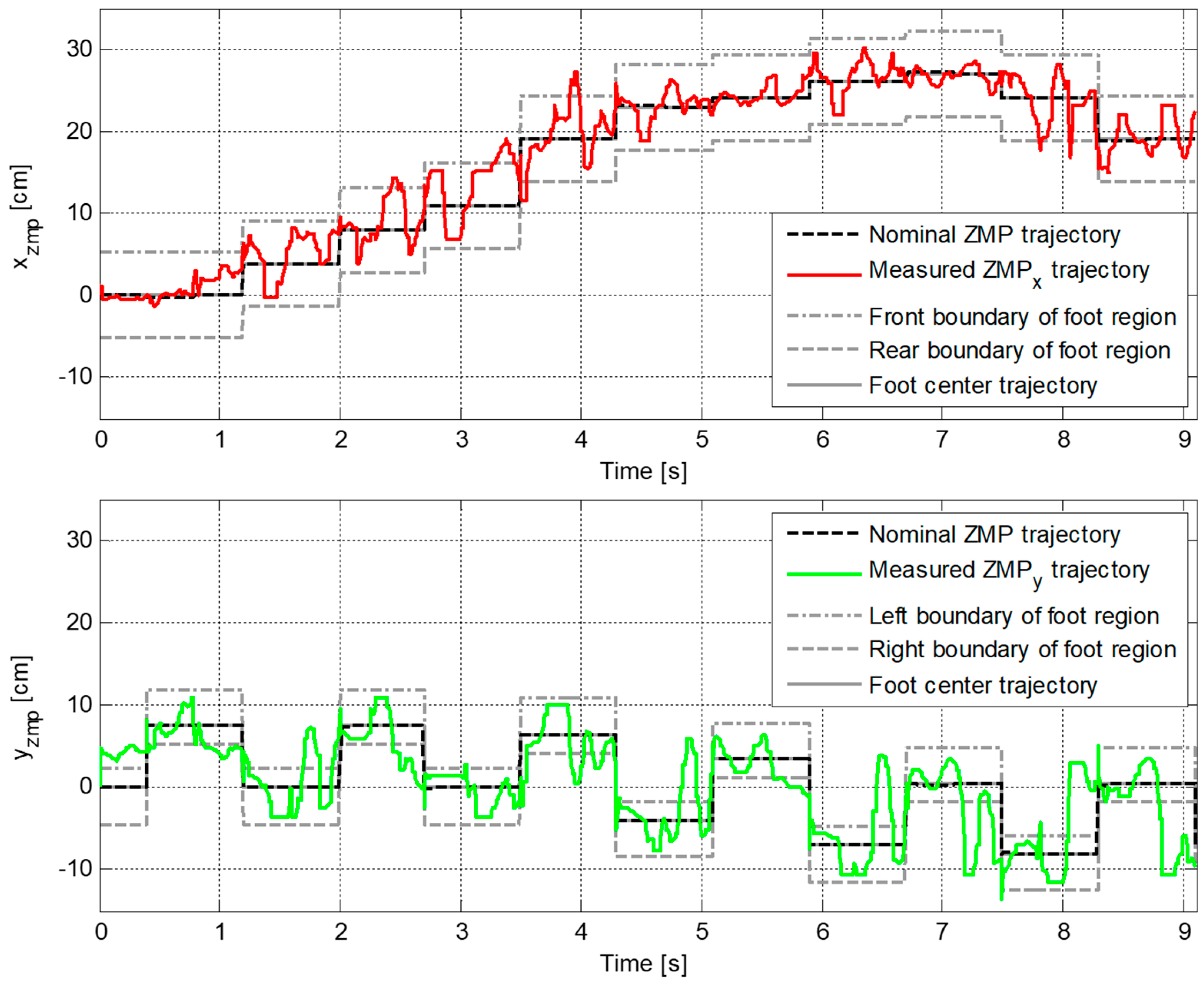
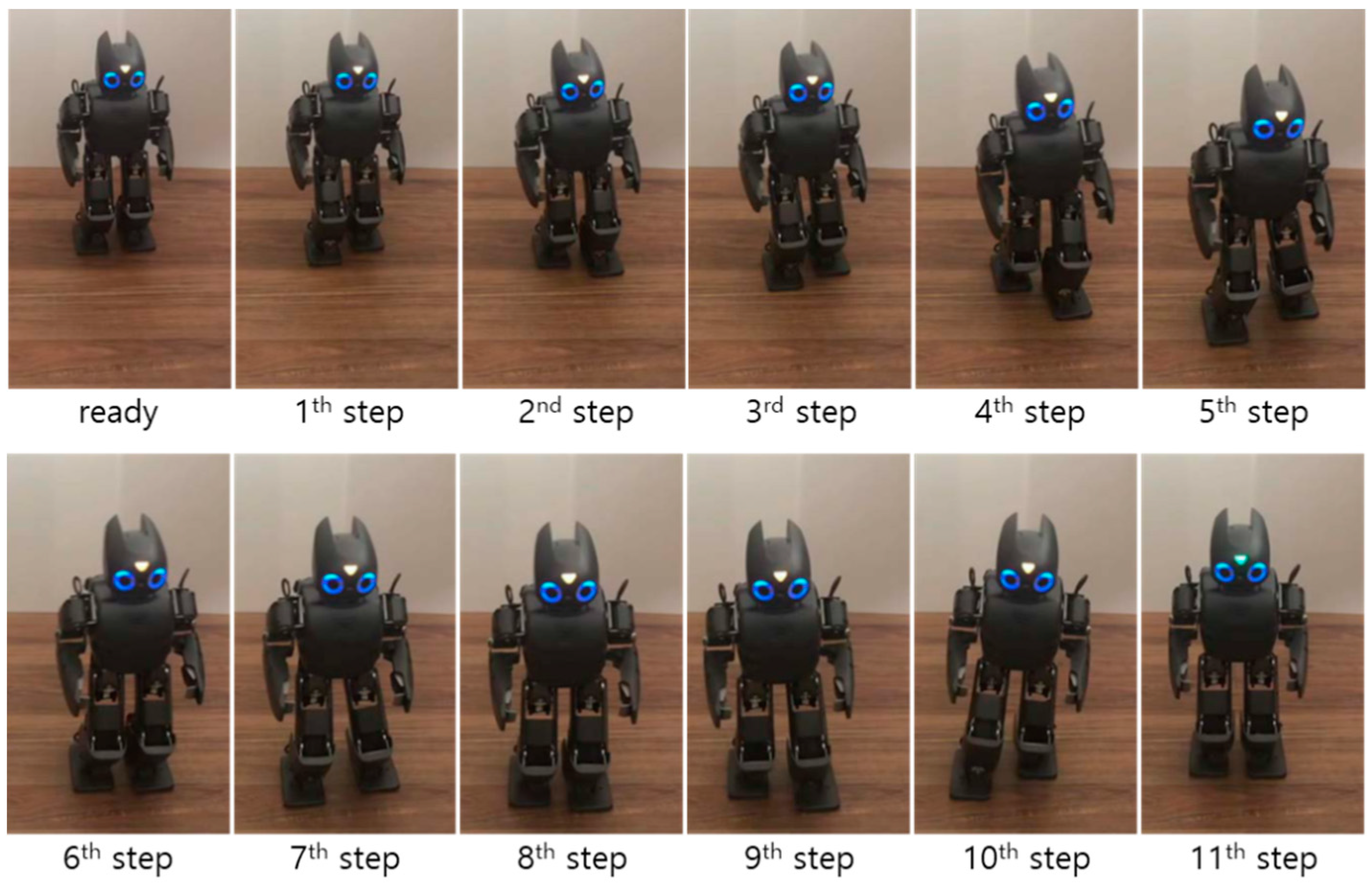
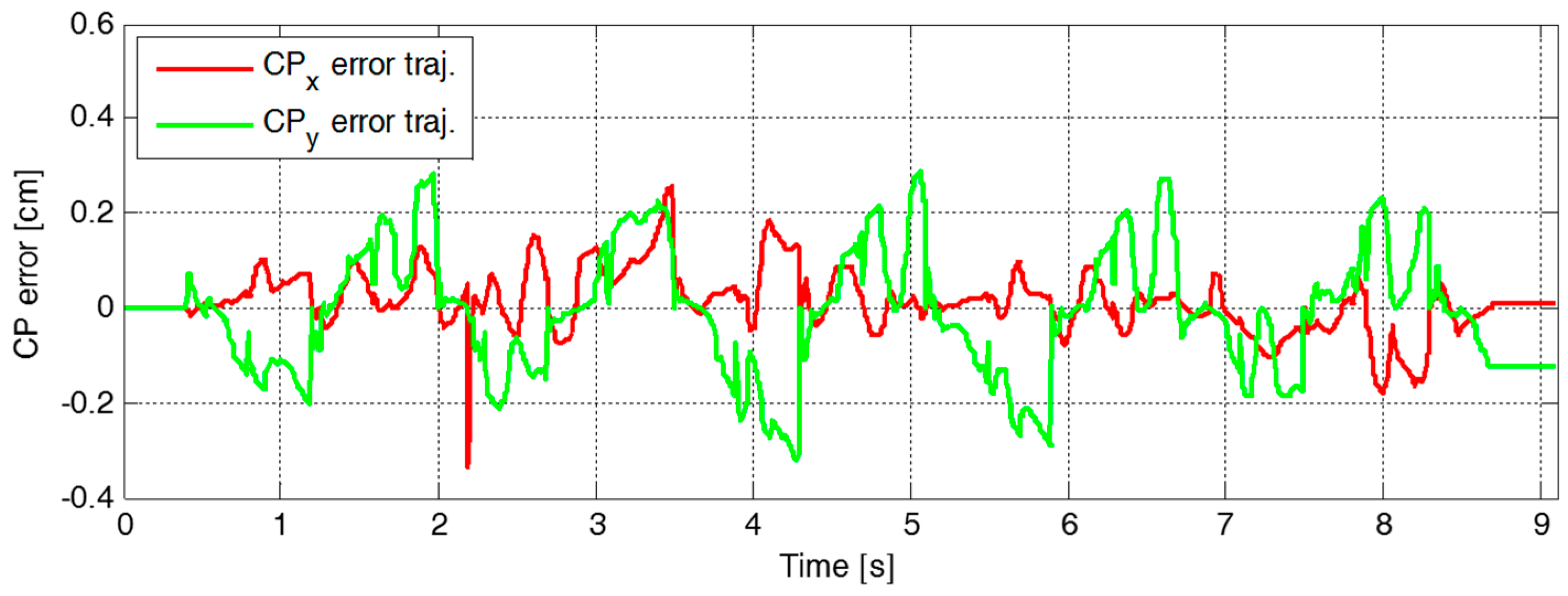
4.2. Experimental Results
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Yokoi, K.; Hirukawa, H. A realtime pattern generator for biped walking. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 31–37. [Google Scholar]
- Sugihara, T.; Nakamura, Y.; Inoue, H. Realtime humanoid motion generation through ZMP manipulation based on inverted pendulum control. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 1404–1409. [Google Scholar]
- Nishiwaki, K.; Kagami, S.; Kuniyoshi, Y.; Inaba, M.; Inoue, H. Online generation of humanoid walking motion based on a fast generation method of motion pattern that follows desired ZMP. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 2684–2689. [Google Scholar]
- Harada, K.; Kajita, S.; Kaneko, K.; Hirukawa, H. An analytical method for real-time gait planning for humanoid robots. Int. J. Hum. Robot. 2006, 2, 1–19. [Google Scholar] [CrossRef]
- Erbatur, K.; Kurt, O. Natural ZMP trajectories for biped robot reference generation. IEEE Trans. Ind. Electron. 2009, 56, 835–845. [Google Scholar] [CrossRef]
- Lee, B.-J.; Stonier, D.; Kim, Y.-D.; Yoo, J.-K.; Kim, J.-H. Modifiable walking pattern of a humanoid robot by using allowable ZMP variation. IEEE Trans. Robot. 2008, 24, 917–925. [Google Scholar]
- Hong, Y.-D.; Lee, B.-J.; Kim, J.-H. Command state-based modifiable walking pattern generation on an inclined plane in pitch and roll directions for humanoid robots. IEEE/ASME Trans. Mechatron. 2011, 16, 783–789. [Google Scholar] [CrossRef]
- Hong, Y.-D.; Kim, J.-H. 3-D command state-based modifiable bipedal walking on uneven terrain. IEEE/ASME Trans. Mechatron. 2013, 18, 657–663. [Google Scholar] [CrossRef]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 14–19. [Google Scholar]
- Kajita, S.; Morisawa, M.; Harada, K.; Kaneko, K.; Kanehiro, F.; Fujiwara, K.; Hirukawa, H. Biped walking pattern generation allowing auxiliary ZMP control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2993–2999. [Google Scholar]
- Wieber, P.-B. Trajectory free linear model predictive control for stable walking in the presence of strong perturbations. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 137–142. [Google Scholar]
- Pratt, J.; Carff, J.; Drakunov, S.; Goswami, A. Capture point: A step toward humanoid push recovery. In Proceedings of the 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 200–207. [Google Scholar]
- Takenaka, T.; Matsumoto, T.; Yoshiike, T. Real time motion generation and control for biped robot -1st report: Walking gait pattern generation-. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1084–1091. [Google Scholar]
- Englsberger, J.; Ott, C.; Roa, M.A.; Albu-Schäffer, A.; Hirzinger, G. Bipedal walking control based on capture point dynamics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4420–4427. [Google Scholar]
- Englsberger, J.; Ott, C. Integration of vertical COM motion and angular momentum in an extended capture point tracking controller for bipedal walking. In Proceedings of the 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), Osaka, Japan, 29 November–1 December 2012; pp. 183–189. [Google Scholar]
- Seyde, T.; Shrivastava, A.; Englsberger, J.; Bertrand, S.; Pratt, J.; Griffin, R.J. Inclusion of angular momentum during planning for capture point based walking. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1791–1798. [Google Scholar]
- Englsberger, J.; Ott, C.; Albu-Schäffer, A. Three-dimensional bipedal walking control based on divergent component of motion. IEEE Trans. Robot. 2015, 31, 355–368. [Google Scholar] [CrossRef]
- Chestnutt, J.; Nishiwaki, K.; Kuffner, J.; Kagami, S. An adaptive action model for legged navigation planning. In Proceedings of the 2007 7th IEEE-RAS International Conference on Humanoid Robots, Pittsburgh, PA, USA, 29 November–1 December 2007; pp. 196–202. [Google Scholar]
- Karkowski, P.; Oßwald, S.; Bennewitz, M. Real-time footstep planning in 3D environments. In Proceedings of the IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 69–74. [Google Scholar]
- Michel, O. Cyberbotics Ltd. WebotsTM: Professional mobile robot simulation. Int. J. Adv. Robot. Syst. 2004, 1, 39–42. [Google Scholar] [CrossRef]






© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Y.-D. Capture Point-Based Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment. Sensors 2019, 19, 3407. https://doi.org/10.3390/s19153407
Hong Y-D. Capture Point-Based Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment. Sensors. 2019; 19(15):3407. https://doi.org/10.3390/s19153407
Chicago/Turabian StyleHong, Young-Dae. 2019. "Capture Point-Based Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment" Sensors 19, no. 15: 3407. https://doi.org/10.3390/s19153407
APA StyleHong, Y. -D. (2019). Capture Point-Based Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment. Sensors, 19(15), 3407. https://doi.org/10.3390/s19153407