A Biomimetic Miniaturized Microphone Array for Sound Direction Finding Applications Based on a Phase-Enhanced Electrical Coupling Network


Abstract
:1. Introduction
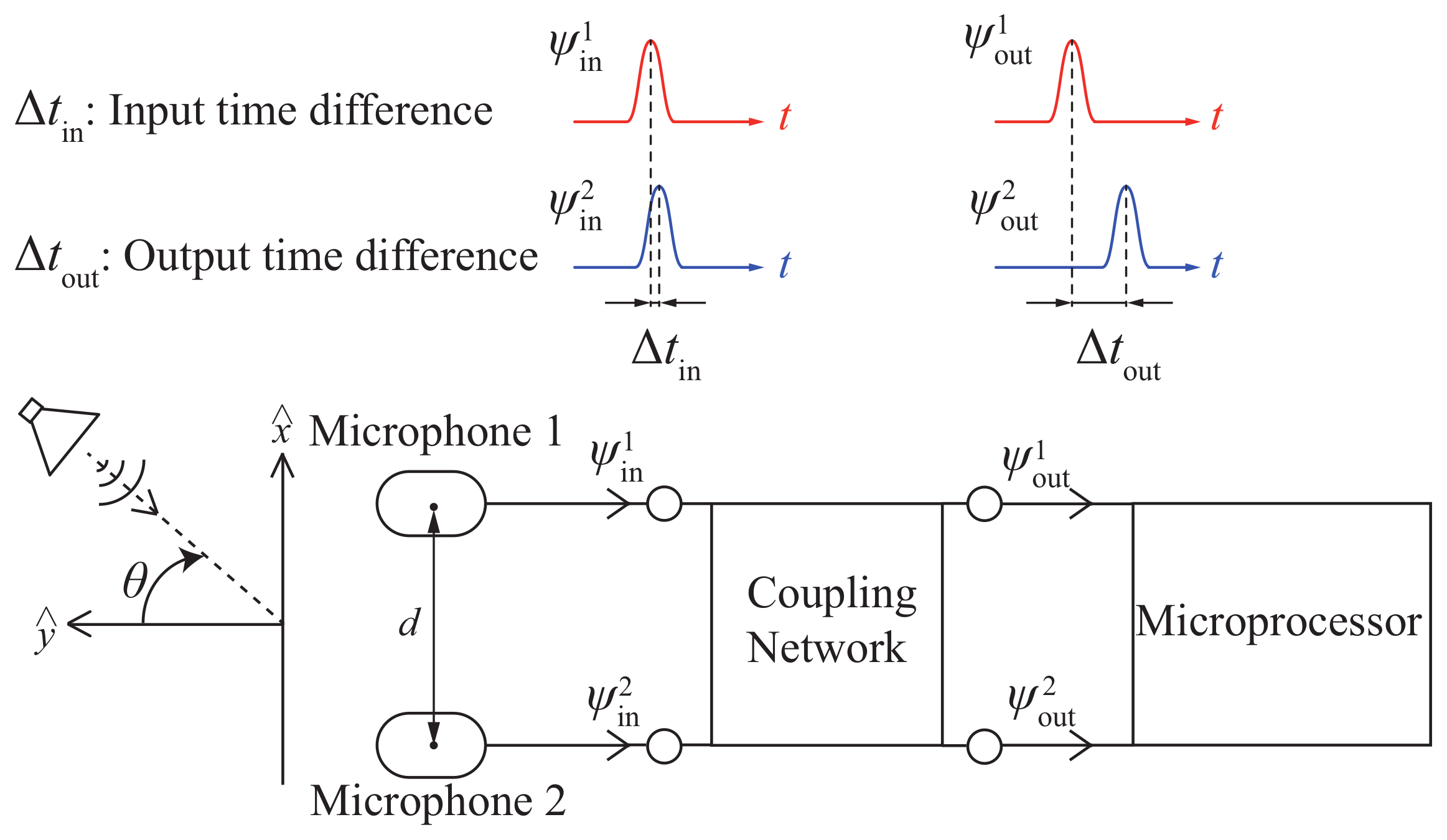
2. Biomimetic Miniaturized Microphone Array
2.1. Designs of Coupling Network Circuit
2.2. Increase the Operation Frequency Bandwidth
3. Fabrications and Measurements
3.1. Microphones
3.2. Coupling Network Circuit
3.3. Field Test Examinations
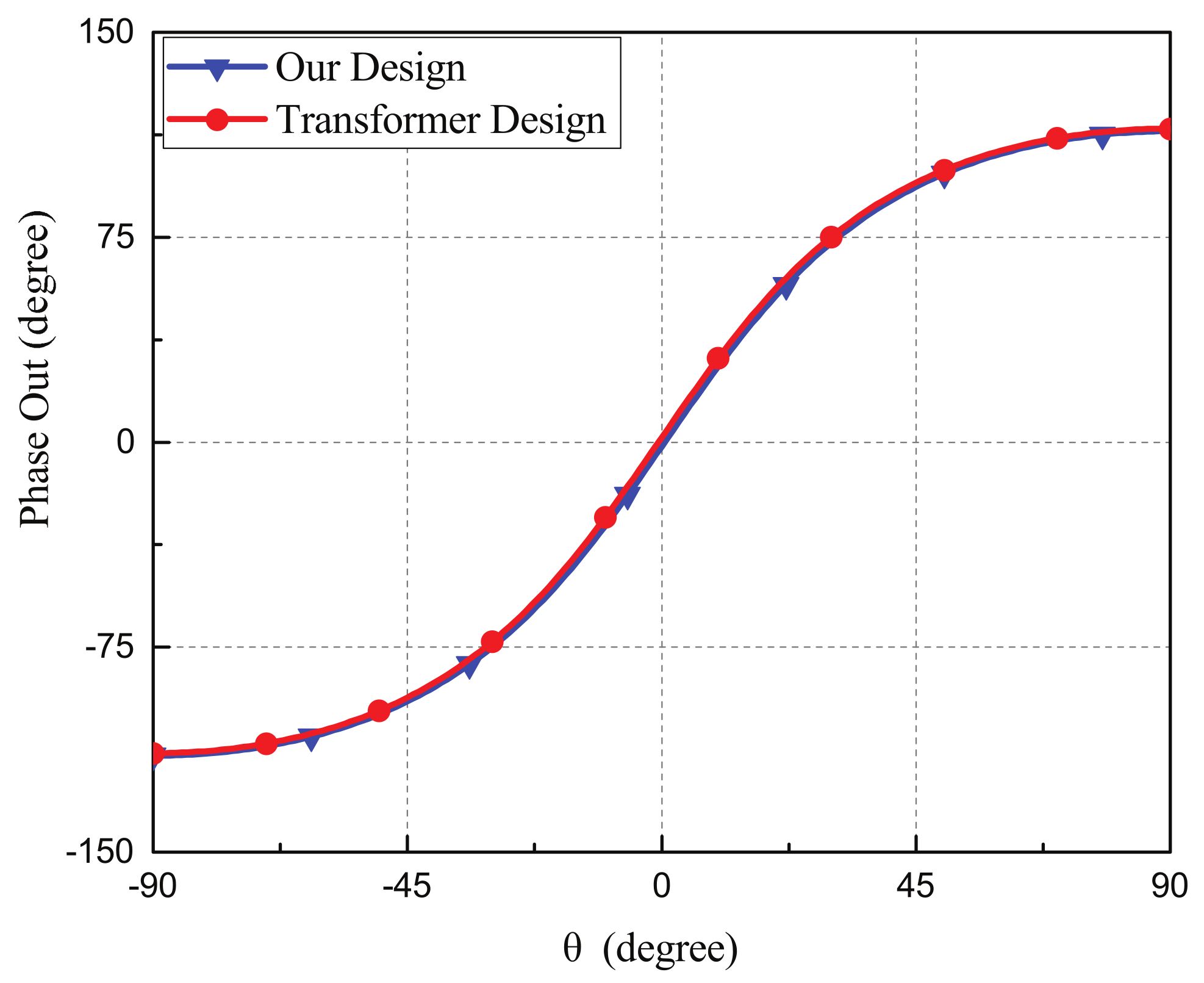
3.4. Compared with Transformer-Type Microphone Arrays
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Hoshiba, K.; Washizaki, K.; Wakabayashi, M.; Ishiki, T.; Kumon, M.; Bando, Y.; Gabriel, D.; Nakadai, K.; Okuno, H.G. Design of UAV-Embedded Microphone Array System for Sound Source Localization in Outdoor Environments. Sensors (Basel) 2017, 17, 2535. [Google Scholar] [CrossRef] [PubMed]
- Oestreich, A.; Samaritano, T.; Kamali-Sarvestani, R. Miniaturized Watson-Watt direction finder: An advancement in vehicle safety. In Proceedings of the 2012 IEEE 16th International Symposium on Consumer Electronics, Harrisburg, PA, USA, 4–6 June 2012; pp. 1–3. [Google Scholar]
- Brown, D.; Cook, D.; Fernandez, J. Results from a Small Synthetic Aperture Sonar. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Blomberg, A.E.A.; Austeng, A.; Hansen, R.E. Adaptive Beamforming Applied to a Cylindrical Sonar Array Using an Interpolated Array Transformation. IEEE J. Ocean. Eng. 2012, 37, 25–34. [Google Scholar] [CrossRef]
- Schulwitz, L.; Mortazawi, A. A compact dual-polarized multibeam phased-array architecture for millimeter-wave radar. IEEE Trans. Microw. Theory Tech. 2005, 53, 3588–3594. [Google Scholar] [CrossRef]
- Herwijnen, A.V.; Schweizer, J. Seismic sensor array for monitoring an avalanche start zone: Design, deployment and preliminary results. J. Glaciol. 2011, 57, 267–276. [Google Scholar] [CrossRef]
- Gu, C.; Gao, S.; Liu, H.; Luo, Q.; Loh, T.; Sobhy, M.; Li, J.; Wei, G.; Xu, J.; Qin, F.; et al. Compact Smart Antenna With Electronic Beam-Switching and Reconfigurable Polarizations. IEEE Trans. Antennas Propag. 2015, 63, 5325–5333. [Google Scholar] [CrossRef] [Green Version]
- Zoltowski, M.D.; Wong, K.T. ESPRIT-based 2-D direction finding with a sparse uniform array of electromagnetic vector sensors. IEEE Trans. Signal Process. 2000, 48, 2195–2204. [Google Scholar] [CrossRef]
- Grothe, B.; Pecka, M.; McAlpine, D. Mechanisms of sound localization in mammals. Physiol. Rev. 2010, 90, 983–1012. [Google Scholar] [CrossRef]
- Miles, R.N.; Robert, D.; Hoy, R.R. Mechanically coupled ears for directional hearing in the parasitoid fly Ormia ochracea. J. Acoust. Soc. Am. 1995, 98, 3059–3070. [Google Scholar] [CrossRef]
- Miles, R.; Tieu, T.; Robert, D.; Hoy, R. A mechanical analysis of the novel ear of the parasitoid fly Ormia ochracea. In Proceedings of the Diversity in Auditory Mechanics, Berkeley, CA, USA, 24–28 June 1996. [Google Scholar]
- Robert, D.; Miles, R.N.; Hoy, R.R. Tympanal mechanics in the parasitoid fly Ormia ochracea: Intertympanal coupling during mechanical vibration. J. Comp. Physiol. A 1998, 183, 443–452. [Google Scholar] [CrossRef]
- Miles, R.N.; Su, Q.; Cui, W.; Shetye, M.; Degertekin, F.L.; Bicen, B.; Garcia, C.; Jones, S.; Hall, N. A low-noise differential microphone inspired by the ears of the parasitoid fly Ormia ochracea. J. Acoust. Soc. Am. 2009, 125, 2013–2026. [Google Scholar] [CrossRef] [PubMed]
- Miles, R.N.; Cui, W.; Su, Q.T.; Homentcovschi, D. A MEMS Low-Noise Sound Pressure Gradient Microphone With Capacitive Sensing. J. Microelectromech. Syst. 2015, 24, 241–248. [Google Scholar] [CrossRef]
- Zhang, Y.; Reid, A.; Windmill, J. Insect-inspired acoustic micro-sensors. Curr. Opin. Insect Sci. 2018, 30, 33–38. [Google Scholar] [CrossRef] [PubMed]
- Miles, R.N.; Hoy, R.R. The development of a biologically-inspired directional microphone for hearing aids. Audiol. Neurootol. 2006, 11, 86–94. [Google Scholar] [CrossRef] [PubMed]
- Touse, M.; Sinibaldi, J.; Simsek, K.; Catterlin, J.; Harrison, S.; Karunasiri, G. Fabrication of a microelectromechanical directional sound sensor with electronic readout using comb fingers. Appl. Phys. Lett. 2010, 96, 173701. [Google Scholar] [CrossRef]
- Touse, M.; Sinibaldi, J.; Karunasiri, G. MEMS directional sound sensor with simultaneous detection of two frequency bands. In Proceedings of the 2010 IEEE Sensors, Kona, HI, USA, 1–4 November 2010; pp. 2422–2425. [Google Scholar]
- Wilmott, D.; Alves, F.; Karunasiri, G. Bio-Inspired Miniature Direction Finding Acoustic Sensor. Sci. Rep. 2016, 6, 29957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bauer, R.; Zhang, Y.; Jackson, J.C.; Whitmer, W.M.; Brimijoin, W.O.; Akeroyd, M.A.; Uttamchandani, D.; Windmill, J.F.C. Influence of microphone housing on the directional response of piezoelectric MEMS microphones inspired by Ormia ochracea. IEEE Sens. J. 2017, 17, 5529–5536. [Google Scholar] [CrossRef]
- Downey, R.H.; Karunasiri, G. Reduced Residual Stress Curvature and Branched Comb Fingers Increase Sensitivity of MEMS Acoustic Sensor. J. Microelectromech. Syst. 2014, 23, 417–423. [Google Scholar] [CrossRef]
- Kuntzman, M.L.; Hall, N.A. Rotational Capacitive Micromachined Ultrasonic Transducers (cMUTs). J. Microelectromech. Syst. 2014, 23, 1–3. [Google Scholar] [CrossRef]
- Liu, H.J.; Yu, M.; Zhang, X.M. Biomimetic optical directional microphone with structurally coupled diaphragms. Appl. Phys. Lett. 2008, 93, 243902. [Google Scholar] [CrossRef]
- Liu, H.; Currano, L.; Gee, D.; Helms, T.; Yu, M. Understanding and mimicking the dual optimality of the fly ear. Sci. Rep. 2013, 3, 2489. [Google Scholar] [CrossRef] [PubMed]
- Cui, W.; Bicen, B.; Hall, N.; Jones, S.A.; Degertekin, F.L.; Miles, R.N. Optical Sensing Inadirectional Memsmicrophone Inspired by the Ears of the Parasitoid Fly, Ormia Ochracea. In Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems, Istanbul, Turkey, 22–26 January 2006; pp. 614–617. [Google Scholar]
- Lisiewski, A.P.; Liu, H.; Yu, M. Fly Ear Inspired Miniature Sound Source Localization Sensor: Localization in Two Dimensions. In Proceedings of the ASME 2010 International Mechanical Engineering Congress and Exposition, Vancouver, BC, Canada, 12–18 November 2010; pp. 339–344. [Google Scholar]
- Yoo, K.; Gibbons, C.; Su, Q.T.; Miles, R.N.; Tien, N.C. Fabrication of biomimetic 3-D structured diaphragms. Sens. Actuators A Phys. 2002, 97–98, 448–456. [Google Scholar] [CrossRef]
- Miles, R.N.; Gibbons, C.; Gao, J.; Yoo, K.; Su, Q.; Cui, W. A silicon nitride microphone diaphragm inspired by the ears of the parasitoid fly Ormia ochracea. J. Acoust. Soc. Am. 2001, 110, 2645. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, M.; Zhu, X.; Ta, N.; Rao, Z. A Biologically Inspired Coupled Microphone Array for Sound Source Bearing Estimation. J. Vib. Acoust 2017, 140, 011019. [Google Scholar] [CrossRef]
- Xu, H.; Xu, X.; Jia, H.; Guan, L.; Bao, M. A biomimetic coupled circuit based microphone array for sound source localization. J. Acoust. Soc. Am. 2015, 138, EL270–EL275. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Bao, M.; Jia, H. A biomimetic coupled circuit based microphone array inspired by the fly Ormia ochracea. J. Acoust. Soc. Am. 2017, 141, 3649. [Google Scholar] [CrossRef]
- Behdad, N.; Al-Joumayly, M.A.; Li, M. Biologically Inspired Electrically Small Antenna Arrays With Enhanced Directional Sensitivity. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 361–364. [Google Scholar] [CrossRef]
- Masoumi, A.R.; Behdad, N. An Improved Architecture for Two-Element Biomimetic Antenna Arrays. IEEE Trans. Antennas Propag. 2013, 61, 6224–6228. [Google Scholar] [CrossRef]
- Masoumi, A.R.; Ghaemi, K.; Behdad, N. A Two-Element Biomimetic Antenna Array With Enhanced Angular Resolution and Optimized Power Extraction. IEEE Trans. Antennas Propag. 2015, 63, 1059–1066. [Google Scholar] [CrossRef]
- Akçakaya, M.; Nehorai, A. Biologically inspired coupled antenna beampattern design. Bioinspir. Biomim. 2010, 5, 046003. [Google Scholar] [CrossRef]
- Masoumi, A.R.; Behdad, N. Architecture, Design, and Nonlinear Optimization of Three-Element Biomimetic Antenna Arrays. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 1416–1419. [Google Scholar] [CrossRef]
- Masoumi, A.R.; Behdad, N. Non-foster techniques for designing broadband electrically-small antennas and biomimetic antenna arrays. In Proceedings of the 2014 USNC-URSI Radio Science Meeting (Joint with AP-S Symposium), Memphis, TN, USA, 6–11 July 2014; p. 28. [Google Scholar]
- Nikkhah, M.R.; Ghaemi, K.; Behdad, N. An Electronically Tunable Biomimetic Antenna Array. IEEE Trans. Antennas Propag. 2018, 66, 1248–1257. [Google Scholar] [CrossRef]
- Akcakaya, M.; Muravchik, C.H.; Nehorai, A. Biologically Inspired Coupled Antenna Array for Direction-of-Arrival Estimation. IEEE Trans. Signal Process. 2011, 59, 4795–4808. [Google Scholar] [CrossRef]
- Masoumi, A.R. Biologically-Inspired, Electrically Small Antenna Arrays. Ph.D. Thesis, The University of Wisconsin, Madison, WI, USA, 2015. [Google Scholar]
- Willerton, M.; Yates, D.; Goverdovsky, V.; Papavassiliou, C. Experimental characterization of a large aperture array localization technique using an SDR testbench. In Proceedings of the Wireless Innovation Forum, Conference on Wireless Communications Technologies and Software Defined Radio, London, UK, 30 November 2011; p. 7. [Google Scholar]
- Hou, Y.; Su, J.; Xia, K.; Ji, X. Analysis on performance of biomimetic coupled processing system. In Proceedings of the 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), Guangzhou, China, 6–8 May 2017; pp. 855–859. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Freq. (kHz) | 8 | 9 | 10 | 11 | 12 |
| (F) | 4.4 | 3.4 | 2.7 | 2.2 | 1.8 |
| DMMA204 Microphone Array | Unit: Millisiemens (mS) |
|---|---|
| −1.27 | |
| 18.7 | |
| −0.132 | |
| 0.328 |
| 2.65 | 0.23 | 5.31 | −0.08 | 4.08 | −0.17 |
| 10 | 20 | 7.2 | 5.5 | 6.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.-C.; Liu, C.-H. A Biomimetic Miniaturized Microphone Array for Sound Direction Finding Applications Based on a Phase-Enhanced Electrical Coupling Network. Sensors 2019, 19, 3469. https://doi.org/10.3390/s19163469
Huang C-C, Liu C-H. A Biomimetic Miniaturized Microphone Array for Sound Direction Finding Applications Based on a Phase-Enhanced Electrical Coupling Network. Sensors. 2019; 19(16):3469. https://doi.org/10.3390/s19163469
Chicago/Turabian StyleHuang, Chien-Chang, and Chien-Hao Liu. 2019. "A Biomimetic Miniaturized Microphone Array for Sound Direction Finding Applications Based on a Phase-Enhanced Electrical Coupling Network" Sensors 19, no. 16: 3469. https://doi.org/10.3390/s19163469
APA StyleHuang, C.-C., & Liu, C.-H. (2019). A Biomimetic Miniaturized Microphone Array for Sound Direction Finding Applications Based on a Phase-Enhanced Electrical Coupling Network. Sensors, 19(16), 3469. https://doi.org/10.3390/s19163469