A Wide-Band Digital Lock-In Amplifier and Its Application in Microfluidic Impedance Measurement

 ,
,  and
and
Abstract
1. Introduction
2. The Digital Lock-In Amplifier Architecture
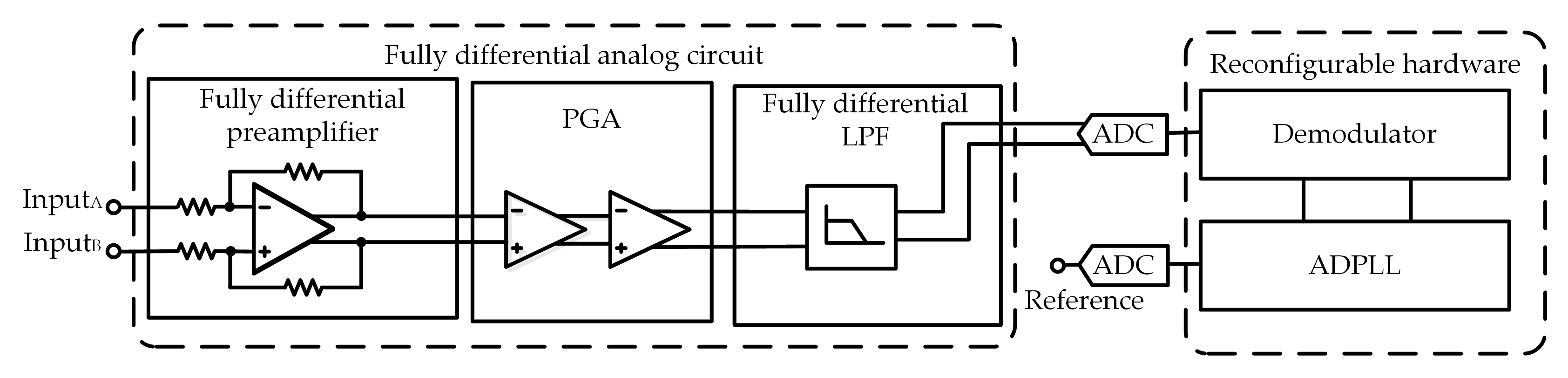
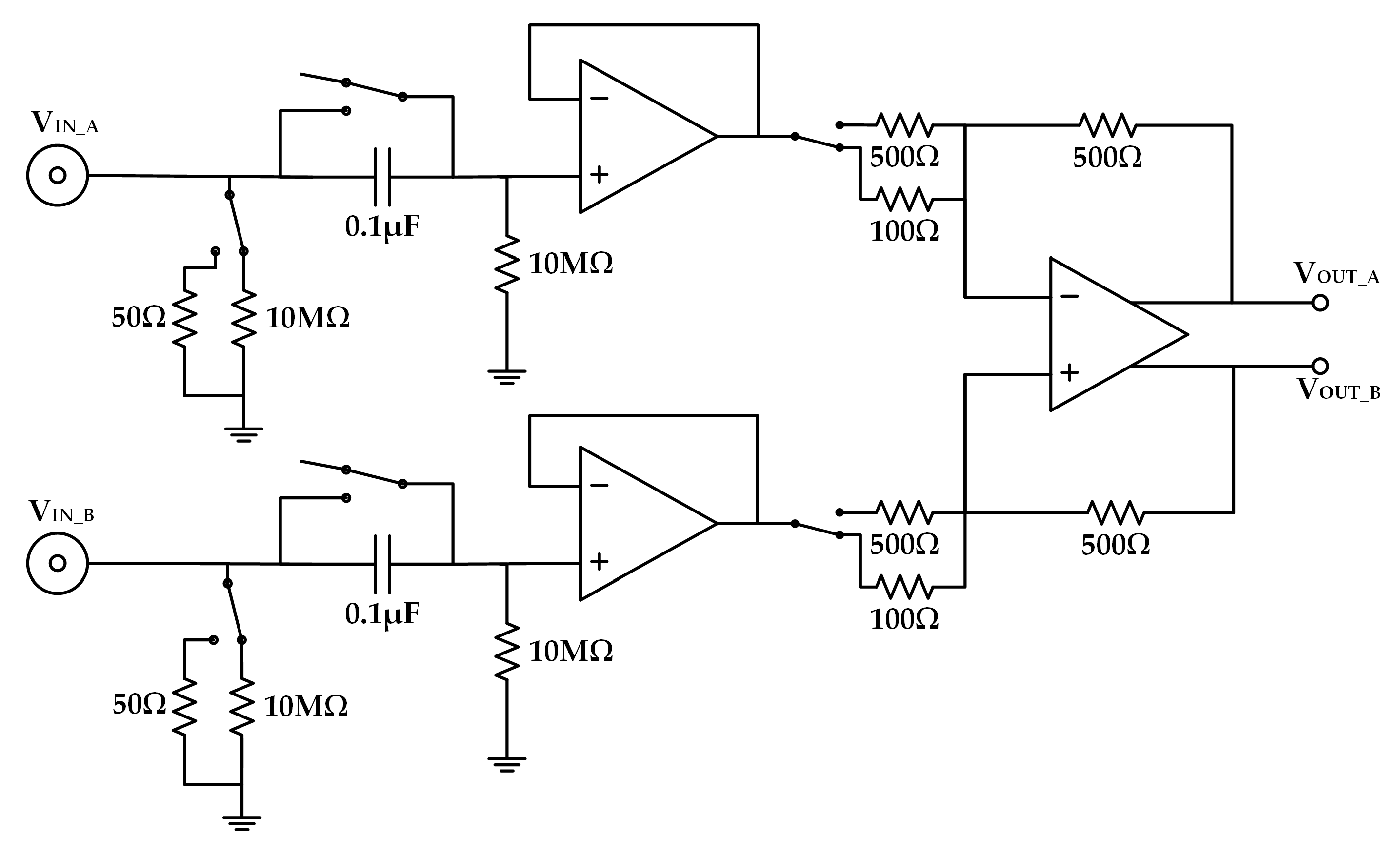
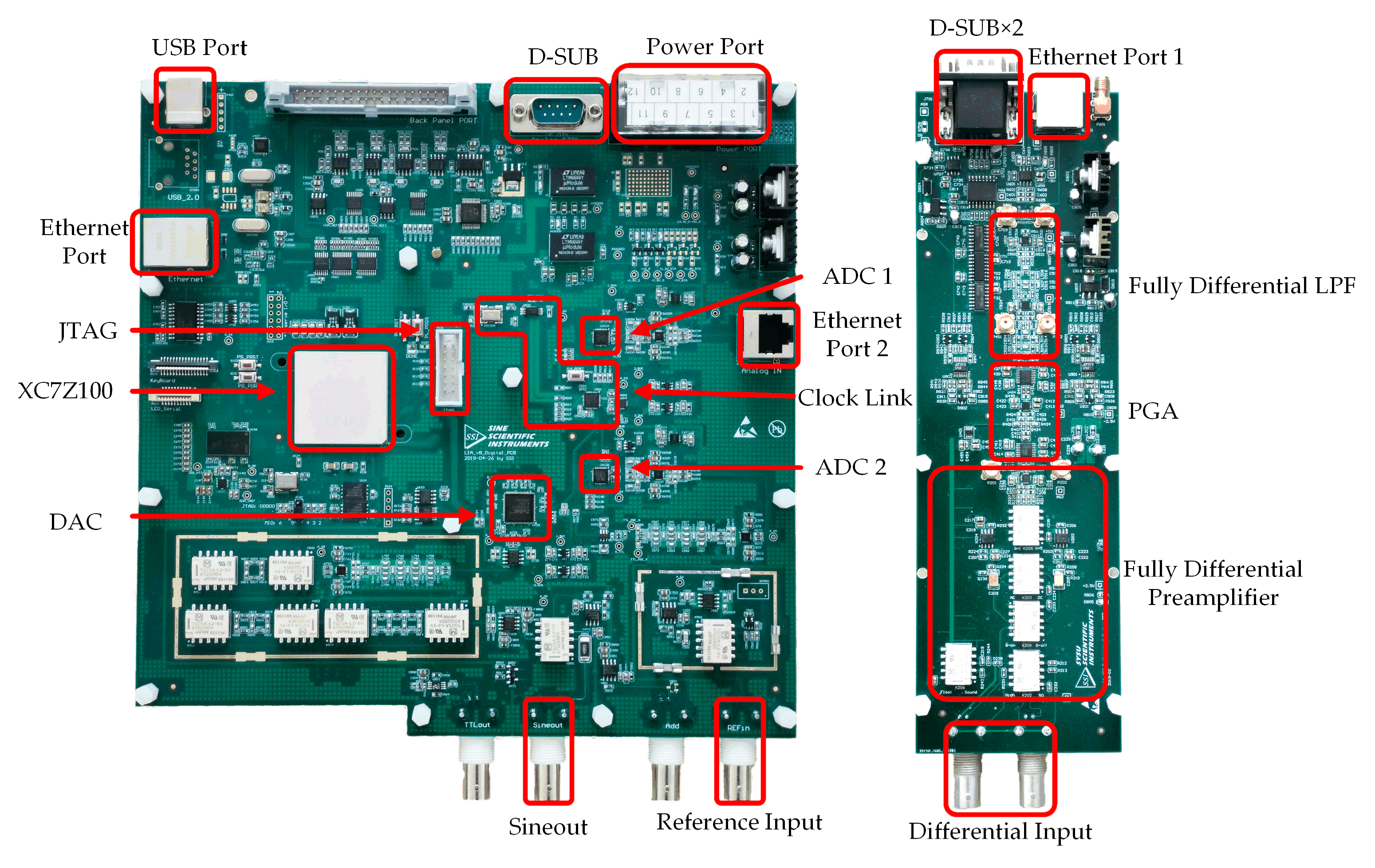
2.1. Fully Differential Analog Circuit
2.1.1. The Preamplifier and Programmable-Gain Amplifier Module
2.1.2. The Fully Differential Low-Pass Filter
2.2. Reconfigurable Hardware Design
2.2.1. Demodulator
2.2.2. All-Digital Phase Lock Loop
2.2.3. Modified Clock Link
3. The DLIA Realization and Characteristics
4. Performance of the Digital Lock-in Amplifier
4.1. Measurement Settings
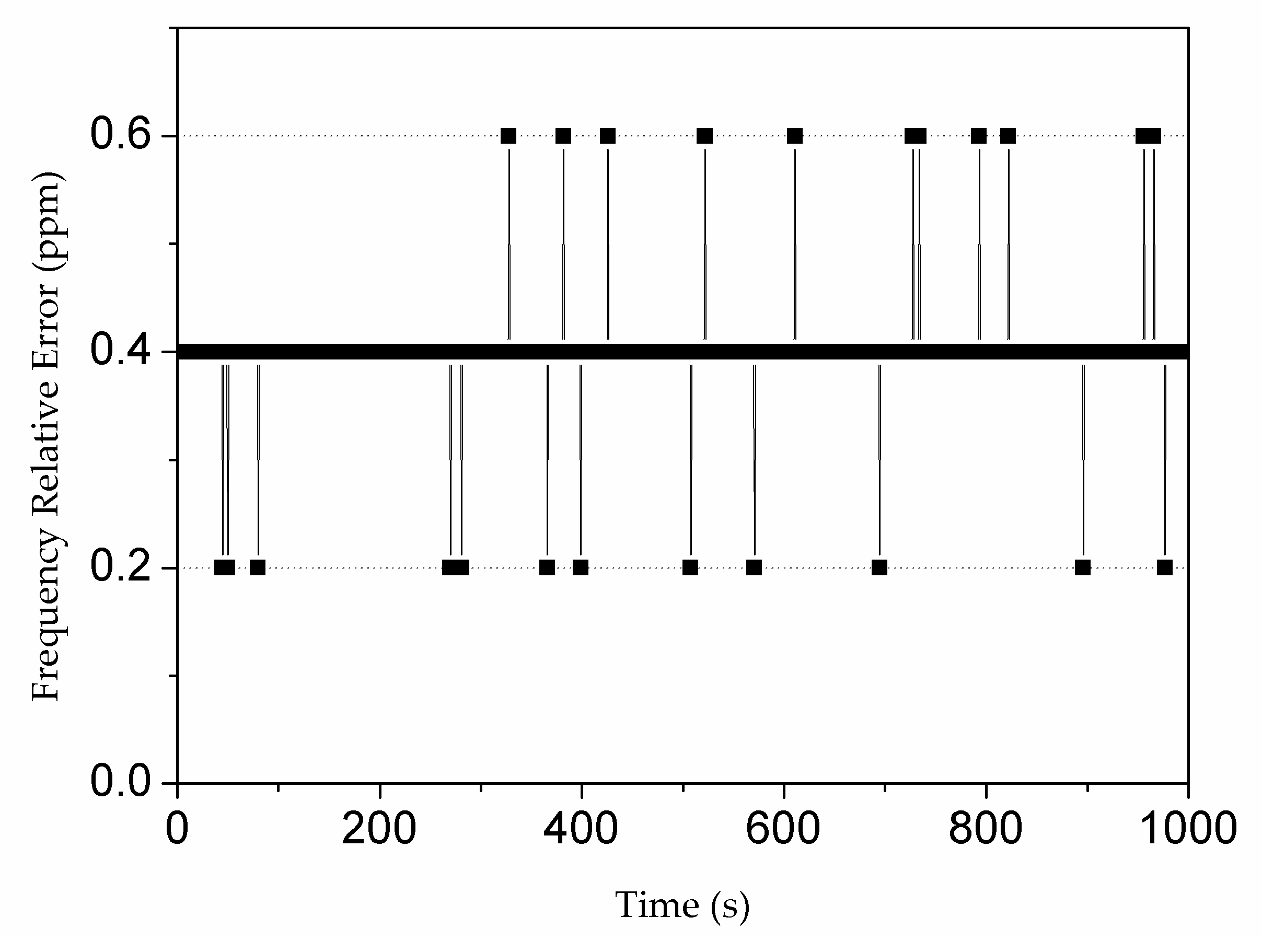
4.2. Deviation and Stability of Phase Detection
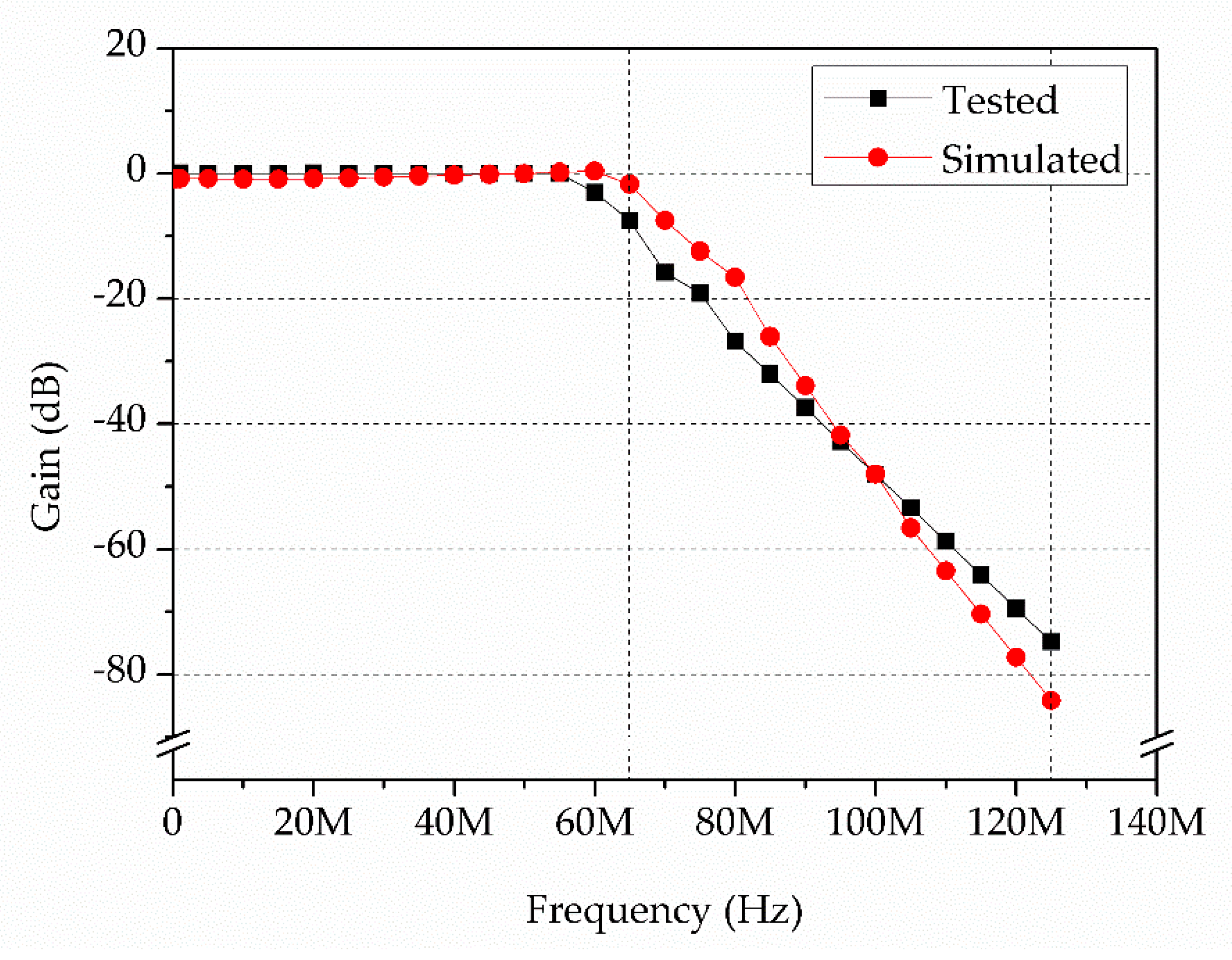
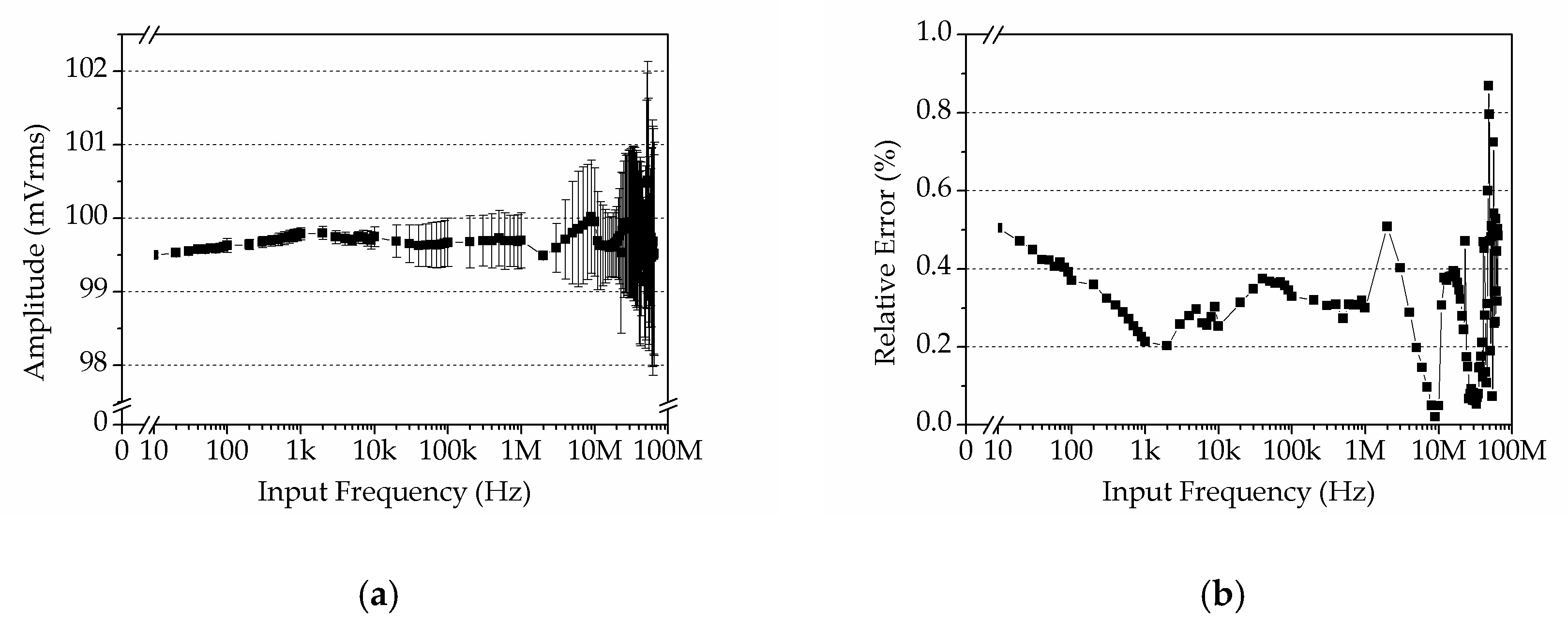
4.3. Amplitude–Frequency Response of the DLIA
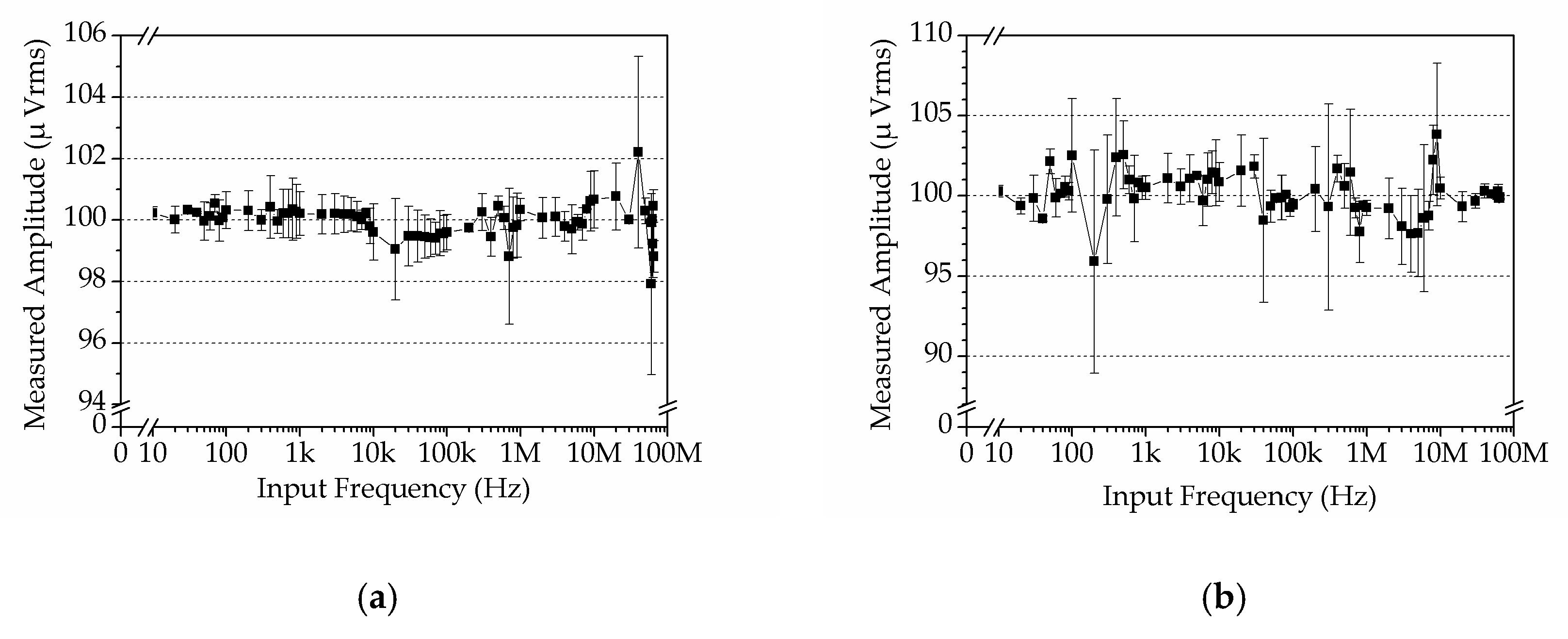
4.4. Ability to Detect Weak Signals
4.5. Ability to Extract Weak Signals from Background Noise
5. Application of the DLIA in Microfluidic Electrical Impedance Measurement
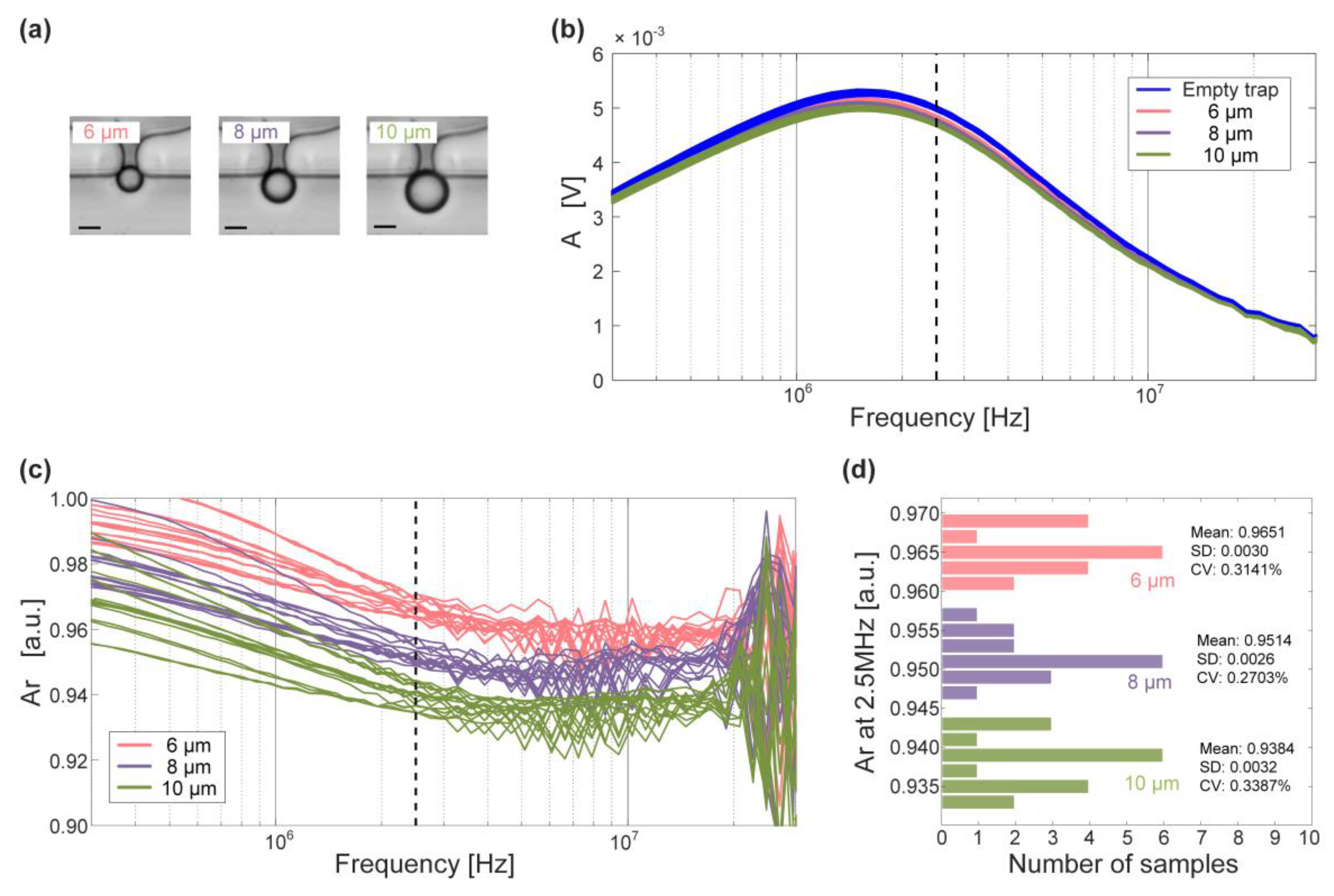
5.1. Electrical Impedance Measurement of Single Beads in a Microfluidic Device
5.2. Classification of Bead Diameters through Electrical Impedance Measurement Using the DLIA
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Meade, M.L. Lock-in Amplifiers: Principles and Applications; Peter Peregrinus Ltd.: London, UK, 1983. [Google Scholar]
- Lioe, D.X.; Mars, K.; Kawahito, S.; Yasutomi, K.; Kagawa, K.; Yamada, T.; Hashimoto, M. A stimulated raman scattering CMOS pixel using a high-speed charge modulator and lock-in amplifier. Sensors 2016, 16, 532. [Google Scholar] [CrossRef] [PubMed]
- Li, T.D.; Chiu, H.C.; Ortiz, Y.D.; Riedo, E. Nanorheology by atomic force microscopy. Rev. Sci. Instrum. 2014, 85, 123707. [Google Scholar] [CrossRef] [PubMed]
- Ayat, M.; Karami, M.A.; Mirzakuchaki, S.; Beheshti, S.A. Design of multiple modulated frequency lock-in amplifier for tapping-mode atomic force microscopy systems. IEEE Trans. Instrum. Meas. 2016, 65, 2284–2292. [Google Scholar] [CrossRef]
- Duan, M.C.; Liu, Z.L.; Ge, J.F.; Tang, Z.J.; Wang, G.Y.; Wang, Z.X.; Guan, D.; Li, Y.Y.; Qian, D.; Liu, C.; et al. Development of in situ two-coil mutual inductance technique in a multifunctional scanning tunneling microscope. Rev. Sci. Instrum. 2017, 88, 073902. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Chen, W.; Tian, B.; Luo, Y.; Lan, J.; Wu, D.; Chen, D.; Wang, Z.; Pan, D. Using microfluidic impedance cytometry to measure C. elegans worms and identify their developmental stages. Sens. Actuators B Chem. 2018, 275, 470–482. [Google Scholar] [CrossRef]
- Takamura, T.; Ko, P.J.; Sharma, J.; Yukino, R.; Ishizawa, S.; Sandhu, A. Magnetic-particle-sensing based diagnostic protocols and applications. Sensors 2015, 15, 12983–12998. [Google Scholar] [CrossRef] [PubMed]
- Qin, J.; Huang, Z.; Ge, Y.; Hou, Y.; Chu, J. Tandem demodulation lock-in amplifier based on digital signal processor for dual-modulated spectroscopy. Rev. Sci. Instrum. 2009, 80, 033112. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Xu, Y.; Wu, L.; Wang, G. A digital lock-in amplifier for use at temperatures of up to 200 °C. Sensors 2016, 16, 1899. [Google Scholar] [CrossRef] [PubMed]
- Gervasoni, G.; Carminati, M.; Ferrari, G. Switched ratiometric lock-in amplifier enabling sub-ppm measurements in a wide frequency range. Rev. Sci. Instrum. 2017, 88, 104704. [Google Scholar] [CrossRef] [PubMed]
- Zurich Instruments HF2LI 50 MHz Lock-in Amplifier. 2019, 1–4. Available online: https://www.zhinst.com/products/hf2li (accessed on 8 January 2019).
- Yang, C.; Rairigh, D.; Mason, A. On-chip electrochemical impedance spectroscopy for biosensor arrays. In Proceedings of the Sensors, 2006 IEEE, Daegu, Korea, 22–25 October 2006. [Google Scholar]
- Kassanos, P.; Triantis, I.F.; Demosthenous, A. A CMOS magnitude/phase measurement chip for impedance spectroscopy. IEEE Sens. J. 2013, 13, 2229–2236. [Google Scholar] [CrossRef]
- Diniel, S.; Caselli, F.; Paolo, B.; Morgan, H. High accuracy particle analysis using sheathless microfluidic impedance cytometry. Lab Chip 2016, 16, 2058–2061. [Google Scholar]
- Bogatin, E. Signal Integrity-Simplified, 2nd ed.; Prentice Hall Professional Technical Reference: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Henry, W.O. Noise Reduction Techniques in Electronic Systems, 2nd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1988. [Google Scholar]
- Wang, G.; Reboul, S.; Choquel, J.B.; Fertein, E.; Chen, W. Circular regression in a dual-phase lock-in amplifier for coherent detection of weak signal. Sensors 2017, 17, 2615. [Google Scholar] [CrossRef] [PubMed]
- Jørgensen, N.B.; Birkmose, D.; Trelborg, K.; Wacker, L.; Winter, N.; Hilliard, A.J.; Bason, M.G.; Arlt, J.J. A simple laser locking system based on a field-programmable gate array. Rev. Sci. Instrum. 2016, 87, 073106. [Google Scholar] [CrossRef] [PubMed]
- Shen, W.; Zhang, F. A new all-digital phase-locked loop based on single CPLD. In Proceedings of the 8th IEEE International Conference Communication Software Networks (ICCSN 2016), Beijing, China, 4–6 Jun 2016. [Google Scholar]
- Making Accurate Frequency Measurements. Available online: http://www.ni.com/product-documentation/3619/en/#top (accessed on 18 February 2013).
- Getting Started with Filter Designer. Available online: https://ww2.mathworks.cn/help/signal/ug/getting-started-with-filter-designer.html (accessed on 8 August 2019).
- Kester, W. Aperture Time, Aperture Jitter, Aperture Delay Time-Removing the Confusion. Tutorial MT-007; Analog Devices: Norwood, MA, USA, 2009. [Google Scholar]
- Kester, W.; Sheingold, D.; Bryandt, J. Analog-Digital Conversion; Analog Devices: Norwood, MA, USA, 2004. [Google Scholar]
- Brannon, B.; Barlow, A. Aperture Uncertainty and ADC System Performance. Application Note AN-501; Analog Devices: Norwood, MA, USA, 2000. [Google Scholar]
- IQD Frequency Products IQXT-200. 2015, 49. Available online: https://www.iqdfrequencyproducts.com/products/details/iqxt-200-1-30.pdf (accessed on 26 April 2016).
- Archambeault, B.R.; Drewniak, J. PCB Design for Real-World EMI Control; Springer Science Business Media: New York, NY, USA, 2013. [Google Scholar]
- Zhu, Z.; Xu, X.; Fang, L.; Pan, D.; Huang, Q.A. Investigation of geometry-dependent sensing characteristics of microfluidic electrical impedance spectroscopy through modeling and simulation. Sens. Actuators B Chem. 2016, 235, 515–524. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | This Work | HF2LI | SR865A |
|---|---|---|---|
| Bandwidth(Hz) | 65 M | 50 M | 4 M |
| Dynamic Reserve(dB) | 120 dB | 120 dB | 120 dB |
| A/D Conversion | 14 bit, 250 MS/s | 14 bit, 210 MS/s | 16 bit, 10 MHz |
| Input Voltage Noise | 6 nV/√Hz | 5 nV/√Hz | 2.5 nV/√Hz |
| Size(cm in Width-Height-Depth (WHD)) | 46 × 45 × 13 | 45 × 28 × 9 | 43 × 43 × 13 |
| Power | 35 W | 45 W | 60 W |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, K.; Geng, Y.; Zhang, X.; Chen, D.; Cai, Z.; Wang, M.; Zhu, Z.; Wang, Z. A Wide-Band Digital Lock-In Amplifier and Its Application in Microfluidic Impedance Measurement. Sensors 2019, 19, 3519. https://doi.org/10.3390/s19163519
Huang K, Geng Y, Zhang X, Chen D, Cai Z, Wang M, Zhu Z, Wang Z. A Wide-Band Digital Lock-In Amplifier and Its Application in Microfluidic Impedance Measurement. Sensors. 2019; 19(16):3519. https://doi.org/10.3390/s19163519
Chicago/Turabian StyleHuang, Kan, Yangye Geng, Xibin Zhang, Dihu Chen, Zhigang Cai, Min Wang, Zhen Zhu, and Zixin Wang. 2019. "A Wide-Band Digital Lock-In Amplifier and Its Application in Microfluidic Impedance Measurement" Sensors 19, no. 16: 3519. https://doi.org/10.3390/s19163519
APA StyleHuang, K., Geng, Y., Zhang, X., Chen, D., Cai, Z., Wang, M., Zhu, Z., & Wang, Z. (2019). A Wide-Band Digital Lock-In Amplifier and Its Application in Microfluidic Impedance Measurement. Sensors, 19(16), 3519. https://doi.org/10.3390/s19163519