Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration

Abstract
:1. Introduction
2. Methodology
2.1. Functional Model
2.2. ADOP Analysis for Three Types of Dual-Antenna Constraints
- Although new information is introduced to the single-rover observation model from both baseline constraints and GNSS measurements of the auxiliary rover, the number of states to be estimated increases too, making it harder to precisely resolve the float ambiguities. Then, is there any benefit from the dual-antenna combination?
- As extra computation load is required to solve the expanded ILS measurement equations in the dual-antenna model, as well as to obtain the constraint observations in DALEC and DAVEC, we need to figure out which strategy should be chosen, and is there any method to reduce computational complexity of the algorithm?
2.2.1. Ambiguity Dilution of Precision
2.2.2. ADOP of the Dual-Antenna Constraint System
2.2.3. ADOP-Based Performance Gain Evaluation
2.3. Precise Positioning with DAVEC
2.3.1. Mechanism
2.3.2. Functional Model of DAVEC-Based RTK
3. Experiments
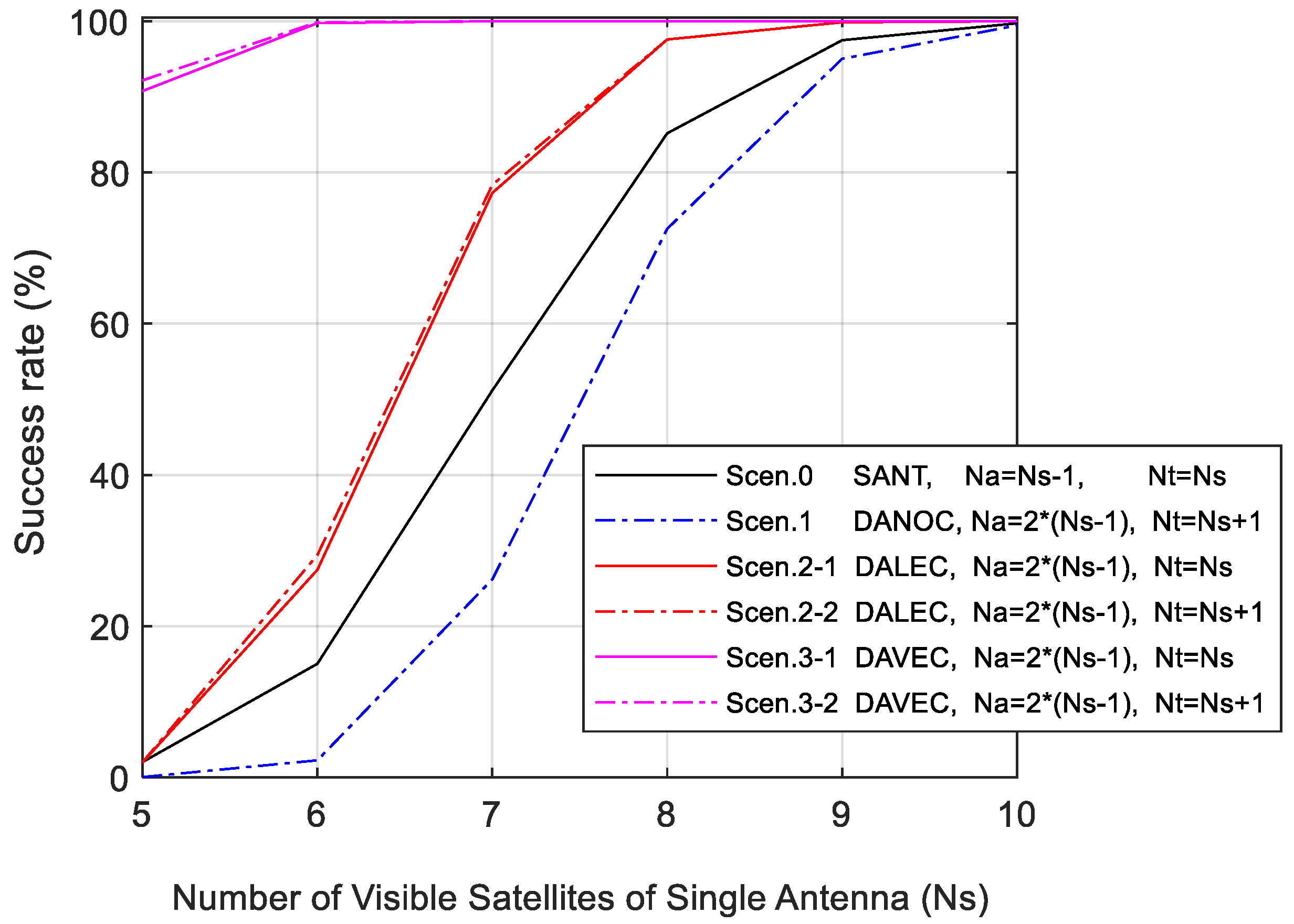
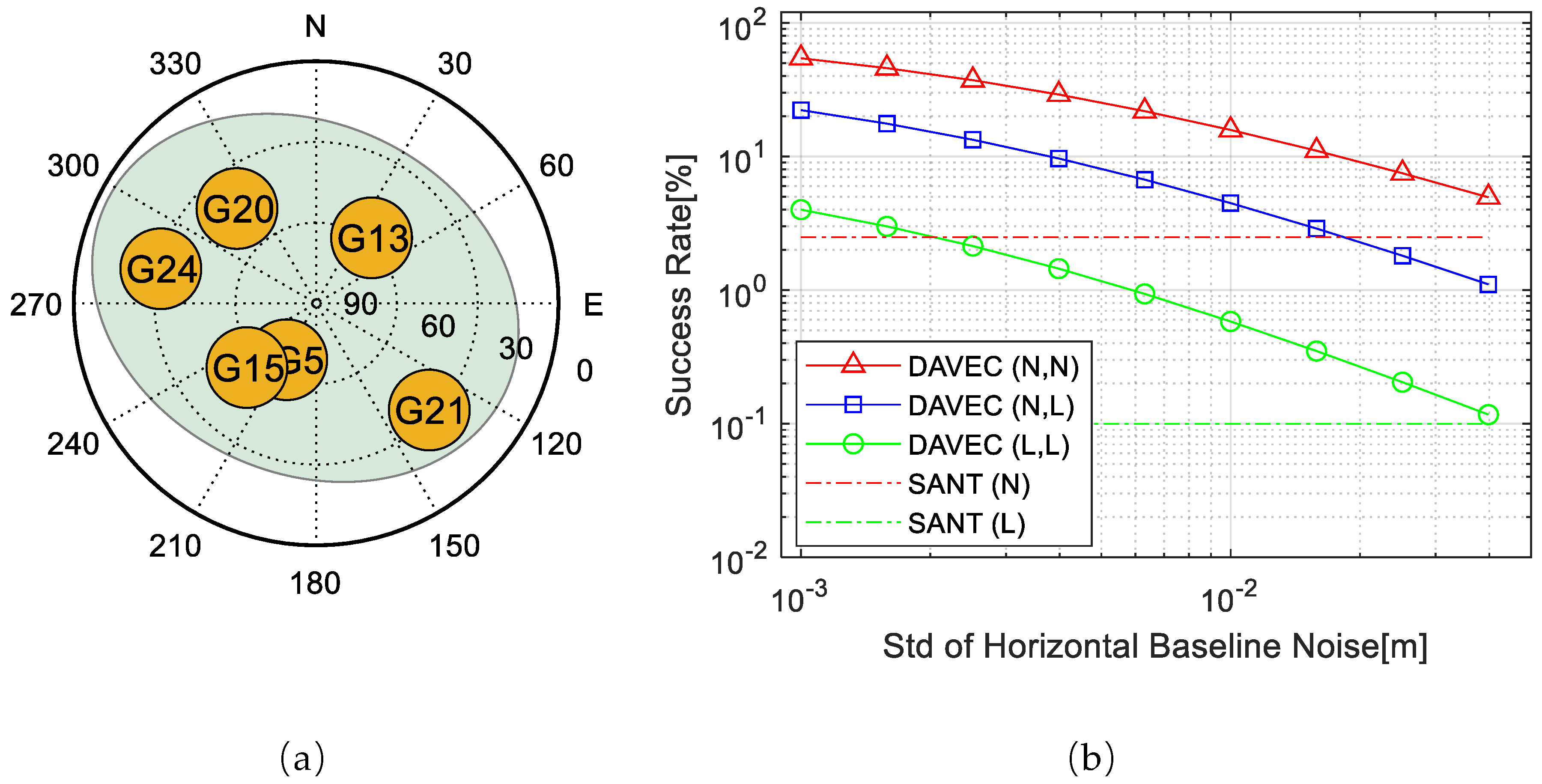
3.1. ADOP-Based AR Success Rate Simulation
3.2. Road Test
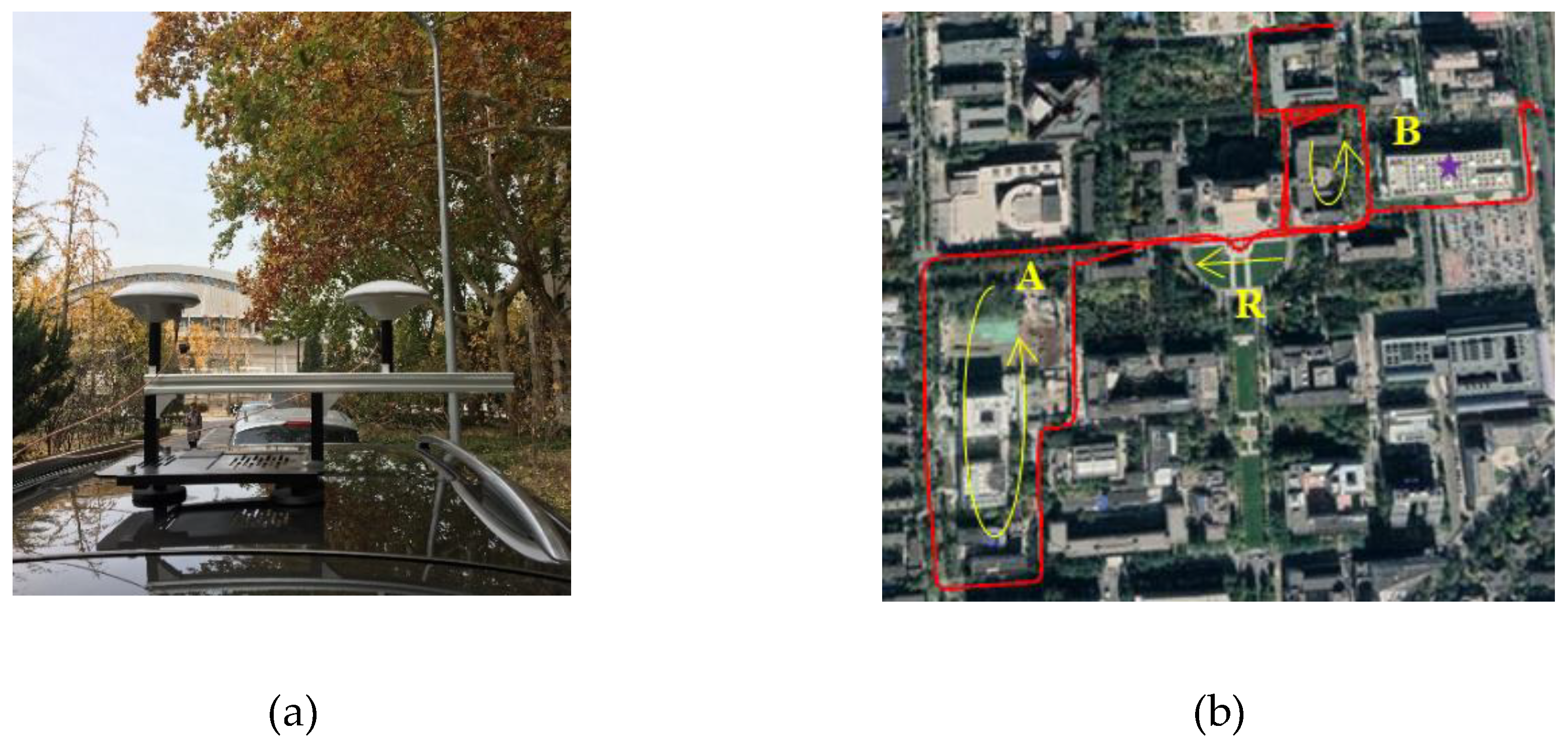
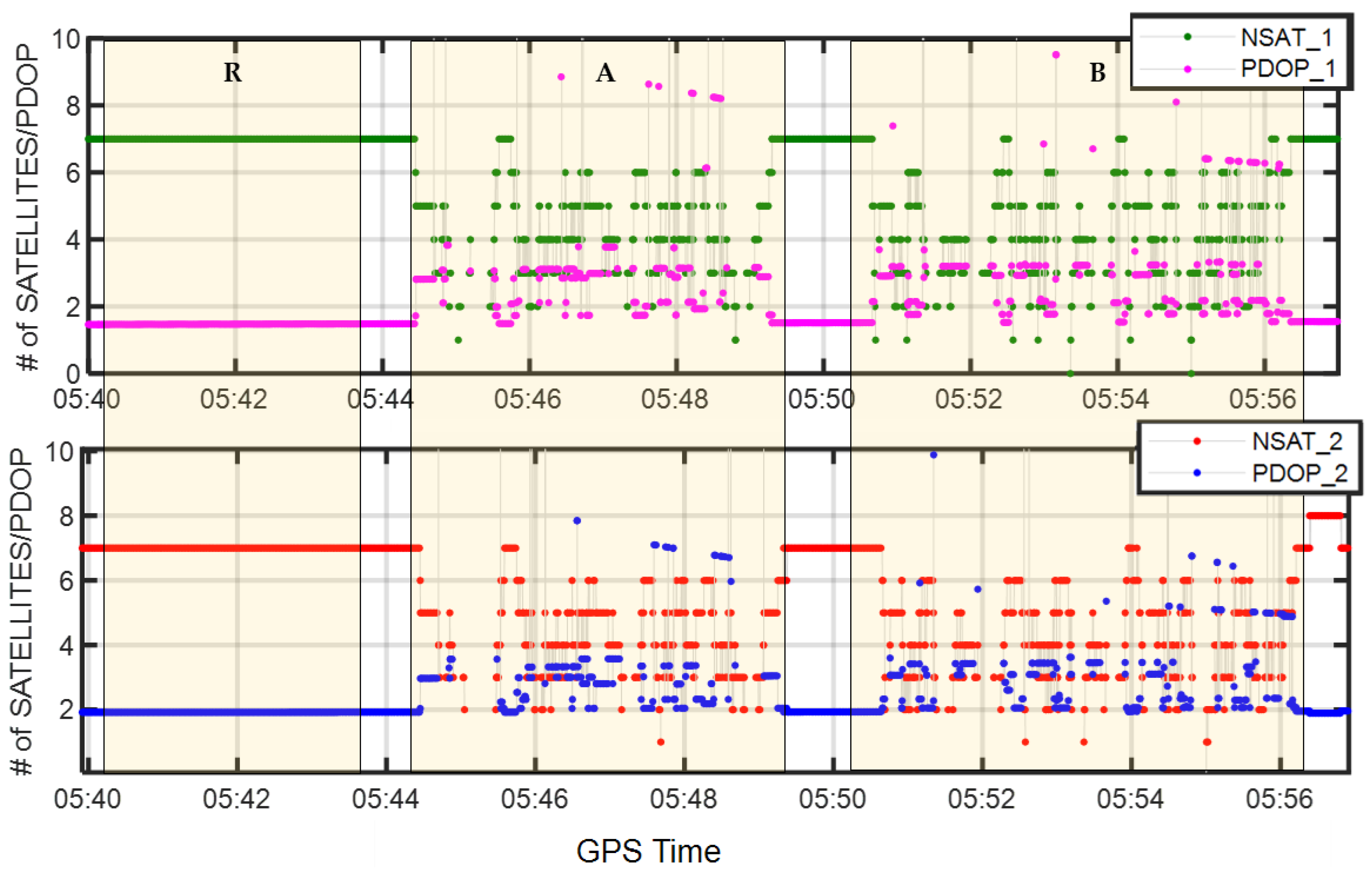
3.2.1. Data Collection
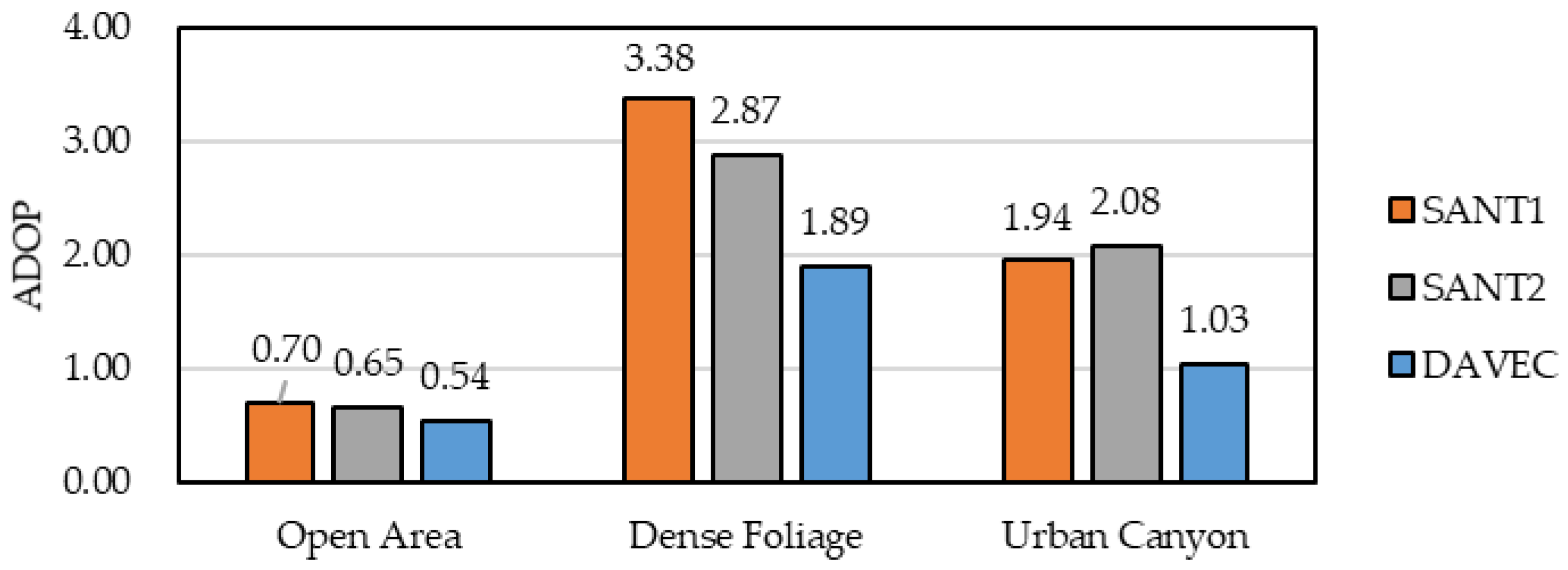
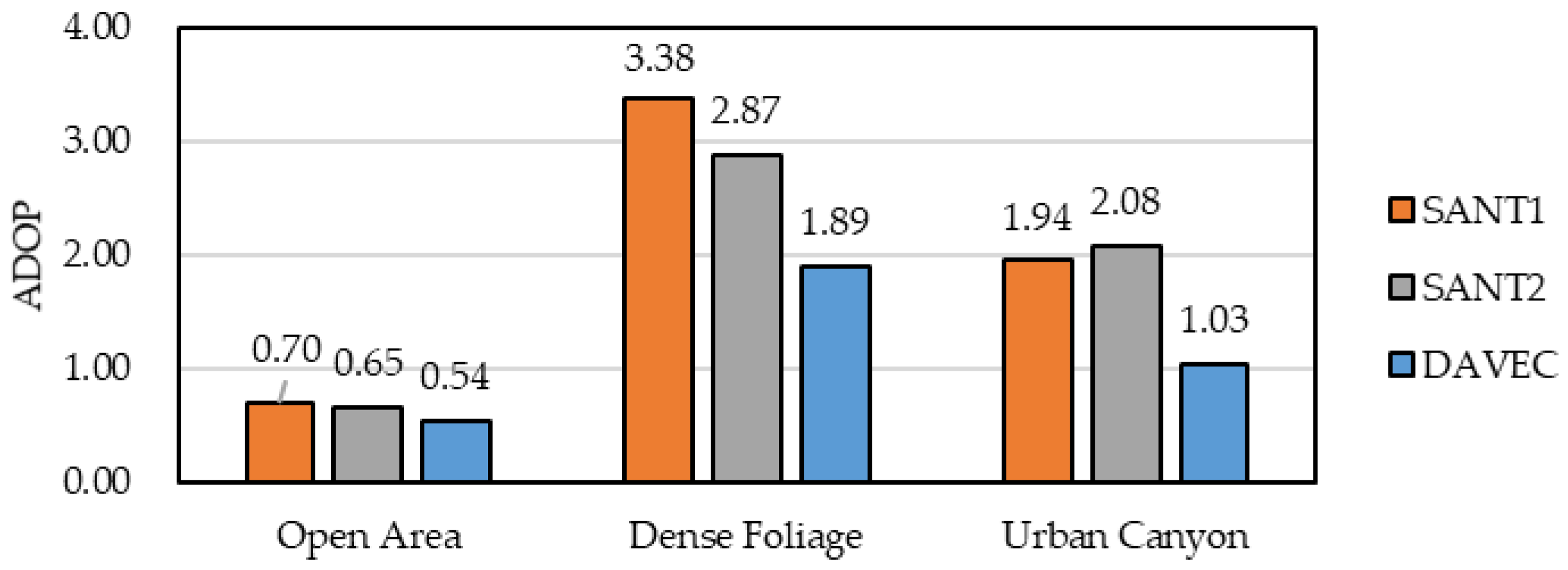
3.2.2. Dual-Antenna ADOPs
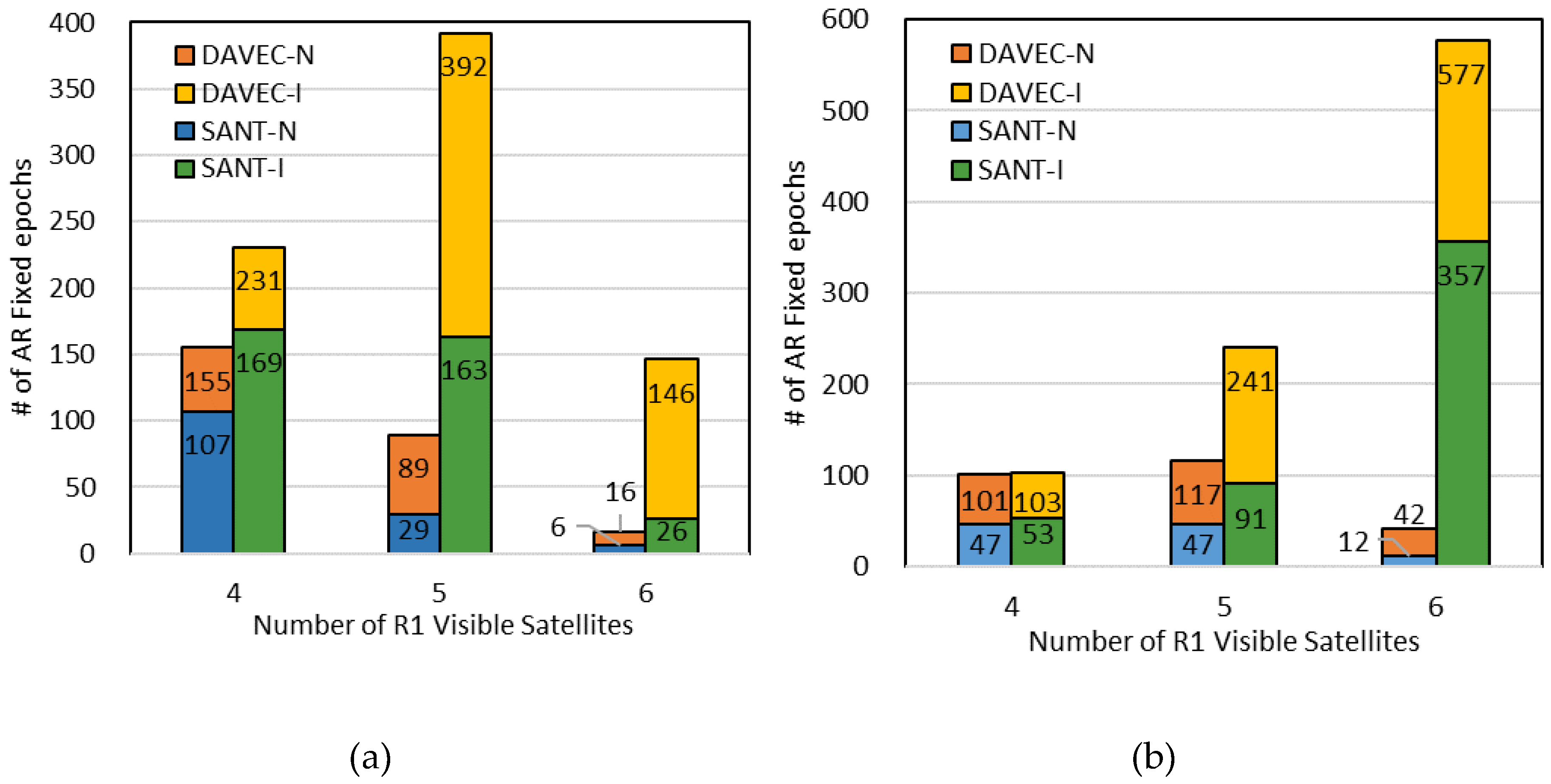
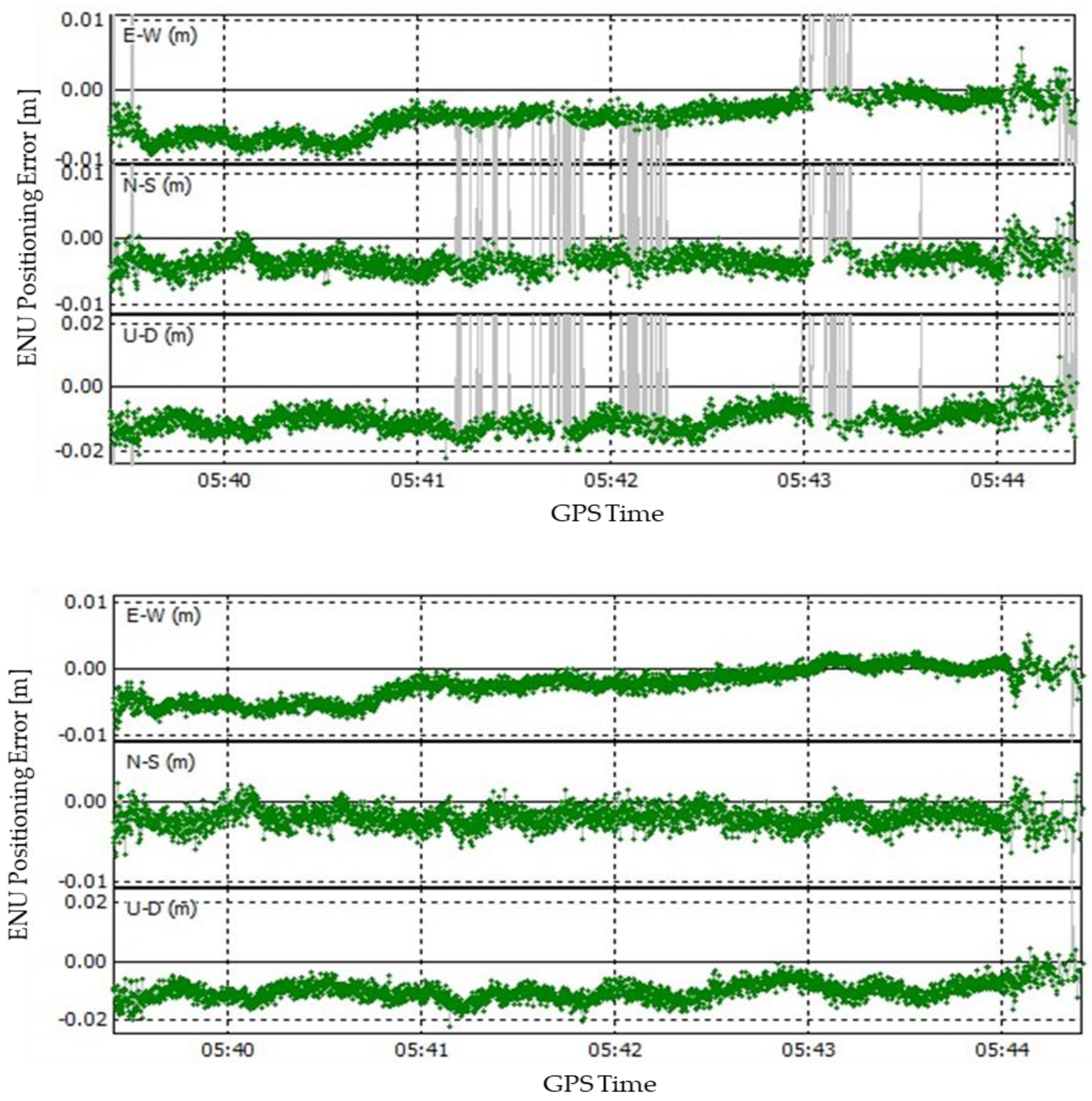
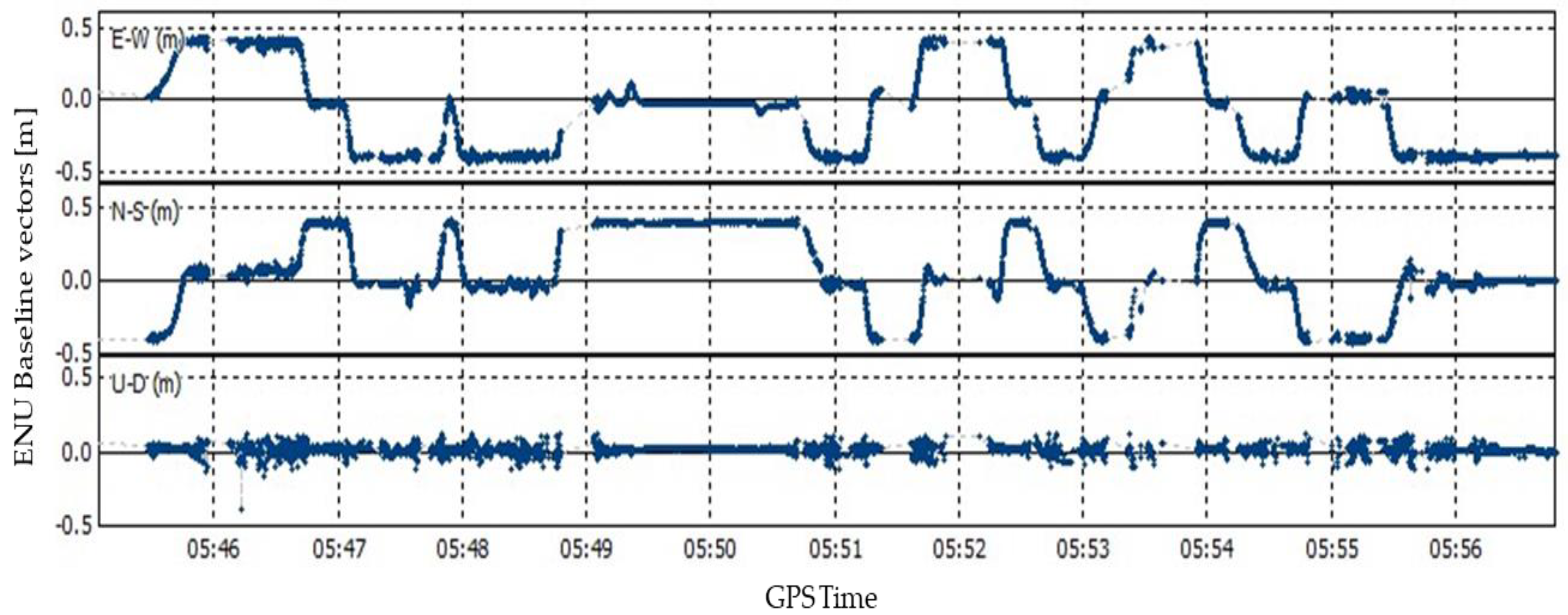
3.3.3. Positioning Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Mathematical Formulae Used in the Dual-Antenna ADOP Derivation
Appendix A.2. Derivation of the ADOP with Baseline Vector Constraint
Appendix B
Appendix B.1. Measurement Projection Based on the Known Baseline Vector:
Appendix B.2. Noise Projection Based on the Known Baseline Vector:
References
- Li, T.; Zhang, H.; Gao, Z.; Chen, Q. High-accuracy positioning in urban environments using single-frequency multi-GNSS RTK/MEMS-IMU integration. Remote Sens. 2018, 10, 205. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Kleusberg, A. GPS for Geodesy, 2nd ed.; Springer: Berlin, Germany, 1998. [Google Scholar]
- Teunissen, P.J.G.; Verhagen, S. GNSS Carrier Phase Ambiguity Resolution: Challenges and Open Problems. Observing Our Changing Earth; Springer: Berlin, Germany, 2009; pp. 785–792. [Google Scholar]
- Aghili, F.; Alessio, S. Driftless 3-D attitude determination and positioning of mobile robots by integration of IMU with two RTK GPSs. IEEE ASME Trans. Mechatron. 2013, 18, 21–31. [Google Scholar] [CrossRef]
- Shetty, A.; Grace, X. Vision-aided measurement level integration of multiple GPS receivers for UAVs. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Hirokawa, R.; Ebinuma, T. A Low-Cost Tightly Coupled GPS/INS for Small UAVs Augmented with Multiple GPS Antennas. Navig. J. Inst. Navig. 2009, 56, 35–44. [Google Scholar] [CrossRef]
- Lin, K.; Deng, Z.; Yin, L. Effective Multipath Mitigation Methods for RTK in Urban Environments. China Satell. Navig. Conf. 2018, 499, 565–576. [Google Scholar]
- Walter, T.; Enge, P.; Blanch, J.; Percvan, B. Worldwide vertical guidance of aircraft based on modernized GPS and new integrity augmentations. Proc. IEEE 2008, 96, 1918–1935. [Google Scholar] [CrossRef]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-time single-frequency GPS/MEMS-IMU attitude determination of lightweight UAVs. Sensors 2015, 10, 26212–26235. [Google Scholar] [CrossRef] [PubMed]
- Aghili, F.; Salerno, A. Attitude determination and localization of mobile robots using two RTK GPSs and IMU. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009. [Google Scholar]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveyin; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Bakuła, M. Study of reliable rapid and ultrarapid static GNSS surveying for determination of the coordinates of control points in obstructed conditions. J. Surv. Eng. 2013, 139, 188–193. [Google Scholar] [CrossRef]
- Paziewski, J. Precise GNSS single epoch positioning with multiple receiver configuration for medium-length baselines: Methodology and performance analysis. Meas. Sci. Technol. 2015, 26, 035002. [Google Scholar] [CrossRef]
- Suzuki, T.; Takahashi, Y.; Amano, Y. Precise UAV Position and Attitude Estimation by Multiple GNSS Receivers for 3D Mapping. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 12–16 September 2016. [Google Scholar]
- Wang, B.; Miao, L.; Wang, S.; Shen, J. A constrained LAMBDA method for GPS attitude determination. GPS Solut. 2009, 13, 97–107. [Google Scholar] [CrossRef]
- Giorgi, G.P.; Teunissen, J.G. Carrier phase GNSS attitude determination with the multivariate constrained LAMBDA method. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010. [Google Scholar]
- Li, W.; Fan, P.; Cui, X.; Zhao, S.; Ma, T.; Lu, M. A Low-Cost INS-Integratable GNSS Ultra-Short Baseline Attitude Determination System. Sensors 2018, 18, 2114. [Google Scholar] [CrossRef] [PubMed]
- Counselman, C.C.; Gourevitch, S.A. Miniature Interferometer Terminals for Earth Surveying: Ambiguity And Multipath with Global Positioning System. IEEE Trans. Geosci. Remote Sens. 1981, GE-14, 244–252. [Google Scholar] [CrossRef]
- Kautz, H.A.; Selman, B.; Jiang, Y. A general stochastic approach to solving problems with hard and soft constraints. Satisf. Probl. Theory Appl. 1996, 35, 573–586. [Google Scholar]
- Teunissen, P.J.G. A canonical theory for short GPS baselines. Part IV: Precision versus reliability. J. Geod. 1997, 71, 513–525. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G. ADOP in closed form for a hierarchy of multi-frequency single-baseline GNSS models. J. Geod. 2008, 82, 473. [Google Scholar] [CrossRef]
- Renga, A.; Fasano, G.; Simonetti, A.; Accardo, D. Fusion of Multi-Antenna Carrier Phase Differential GPS and Inertial Measurements for Performance Evaluation of High Accuracy Integrated Aircraft Navigation Systems. In Proceedings of the AIAA Infotech at Aerospace Conference and Exhibit, Garden Grove, CA, USA, 19–21 June 2012. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2005. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| s/t | l | ω | ||
|---|---|---|---|---|
| DANOC | DAVEC, k = 0 | DAVEC, k = 1 | ||
| 4 | 12 | 12 | 6 | 7 |
| 6 | 20 | 16 | 8 | 9 |
| 8 | 28 | 20 | 10 | 11 |
| Nsat (r1) | SANT1 | DAVEC | IMPR | ||||
|---|---|---|---|---|---|---|---|
| Non | Iden | Total | Non | Iden | Total | ||
| ≤3 | - | - | - | 355 | - | 355 | - |
| 4 | 335 | 329 | 664 | 543 | 481 | 1024 | 54.2% |
| 5 | 294 | 748 | 1042 | 1216 | 1876 | 3092 | 196.7% |
| 6 | 121 | 1568 | 1689 | 498 | 4461 | 4959 | 193.6% |
| 7 | - | 987 | 987 | - | 1111 | 1111 | 12.6% |
| Total | 750 | 3632 | 4382 | 2612 | 7929 | 10,541 | 140.6% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, P.; Li, W.; Cui, X.; Lu, M. Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration. Sensors 2019, 19, 3586. https://doi.org/10.3390/s19163586
Fan P, Li W, Cui X, Lu M. Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration. Sensors. 2019; 19(16):3586. https://doi.org/10.3390/s19163586
Chicago/Turabian StyleFan, Peirong, Wenyi Li, Xiaowei Cui, and Mingquan Lu. 2019. "Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration" Sensors 19, no. 16: 3586. https://doi.org/10.3390/s19163586
APA StyleFan, P., Li, W., Cui, X., & Lu, M. (2019). Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration. Sensors, 19(16), 3586. https://doi.org/10.3390/s19163586