1. Introduction
With the rapid development of China’s electric power industry, various types of electrical equipment have become indispensable in people’s living and production practices, but the problem of electricidal safety cannot be ignored. According to statistics from the Fire Department of the Ministry of Public Security, 237,000 fires occurred in 2018, resulting in a total loss of 3.675 billion yuan. In terms of the causes of the fires, 82,000 fires were caused by electricity, accounting for 34.6% of the total. Electrical fires are the main cause of fires [
1]. In general, short-circuit fault, overload fault, earth leakage fault, and arc fault are the primary causes of electrical fire emergencies. The first three types of faults can be detected and protected against by circuit breakers, and fuse and leakage protectors, respectively [
2,
3,
4]. However, these devices often cannot detect arc faults completely.
According to the Standard IEC 62606-2017, an arc is defined as the phenomenon of luminous discharge across an insulating medium, which is usually accompanied by partial volatilization of the electrodes. An arc fault is defined as a dangerous unintentional arc [
5]. Generally, arc faults can be classified into three types: earth arc fault, parallel arc fault, and series arc fault [
5,
6]. Since the current increases rapidly when the first two types of faults occur, the protection devices can easily detect these faults and remove the fault section. Due to the limitation of load impedance, when a series arc fault occurs, the arc current is not much different from the normal operating current, which means that conventional power protection devices cannot provide protection [
2,
3,
4]. Studies have shown that the temperature of a series fault arc can reach 5000 to 15,000 °C. Aging electrical equipment wiring, damaged electrical insulation, and poor contact can cause arcing faults that cause electrical fires due to the release of large amounts of heat. Therefore, effective and reliable series arc fault detection of power systems is of great significance to prevent the occurrence of electrical fires and protect people’s lives and property.
In early studies, some scholars put forward improved arc models and simplified arc models [
7,
8,
9]. However, since the arc process is a multi-physics coupling process, the situation is extremely complex. Therefore, the arc mathematical model is suitable for theoretical analysis, but it is not practical in arc fault detection.
An arc is a gas discharge phenomenon accompanied by changes in sound, light, heat, electromagnetic fields, and temperature. In Reference [
10], a pressure zone microphone, an infrared receiver, and a loop antenna were used to detect changes in pressure, temperature, and electromagnetic fields, respectively. In Reference [
11], a stick antenna and loop antenna were used to detect electromagnetic radiation signals generated by arc faults. References [
12,
13] used both electric field sensors and magnetic field sensors to capture abnormal electric and magnetic signals generated by arc faults. These methods are suitable in cases where the arc fault location is determined. However, due to the randomness of the arc location, these methods are not applicable in practice.
At present, the development of machine learning (ML) and artificial intelligence (AI) has made many excellent artificial intelligence algorithms the focus of people’s research, such as artificial neural networks (ANNs) and support vector machines (SVMs). Reference [
14] proposed a comprehensive approach of complex load recognition and series arc detection based on a principle component analysis and support vector machine (PCA-SVM) combination model. Reference [
15] developed deep neural networks (DNNs) taking Fourier coefficients, Mel-frequency cepstrum data, and Wavelet features as input for differentiating normal from malignant current measurements. Reference [
16] used the approach of a radial basis function neural network (DRBFNN) to identify the occurrence of series arc faults. However, these intelligent algorithms are complex and require a large amount of computer software and hardware resources, so it is difficult to implement actual product applications at present, and they are mostly in the stage of theoretical analysis and research.
The research methods for current time–frequency, frequency–domain, and time–frequency domain signals are still the focus of AC arc fault detection methods. In Reference [
17], a high-resolution low-frequency harmonic analysis method based on chirp zeta transform (CZT) and a series of indicators were proposed to detect arc faults. Reference [
18] proposed a multi-index arc detection method by summarizing the volt-ampere characteristics of arc under different loads. Reference [
19] designed a band-pass filter with a frequency of 2.4 to 39 kHz to extract the arc signal based on the elimination of low-frequency power signals and high-frequency load noise.
The current waveforms of two common low-voltage appliances in non-arc and arc states are shown in
Figure 1. When an arc fault occurs in the circuit, the current waveform in the line will be significantly distorted [
20]. The detection and analysis of the current signals can effectively identify the AC series arc faults. Many tests have shown that the typical characteristics of arc faults are the flat shoulder and high-frequency noise of the current waveform [
21,
22,
23]. For resistive loads, their flat shoulders are more obvious, and it is easy to distinguish the fault signal. However, for inductive and non-linear loads, such as an air compressor, halogen lamp, vacuum cleaner, and microwave oven, their waveform distortion is severe, and it is easy to cause misjudgment and missed judgment from the characteristics of the flat shoulder [
24]. In addition, if the high-power branch is connected in parallel with the low-power fault branch, the fault signal is easily submerged, and it is difficult to determine the arc fault [
20]. High-frequency noise, which is one of the typical features of arc faults, is often considered to be one of the effective arc fault detection methods [
21,
23,
24]. In previous papers and tests, the arc fault current is rich in high-frequency noise, and its frequency can reach hundreds of kHz or even tens of MHz [
24,
25]. Therefore, the high-frequency noise of the arc current can be used as the basis for the occurrence of arc faults. The key to arc fault detection lies in the acquisition of high-frequency current signals.
A current transformer (CT) with a silicon steel core can collect low-frequency signals. The low-frequency signal of the current reflects the overall trend of the current and there are many signal waveforms in the power systems that approximate arc faults. Due to the wide variety of electrical appliances and new innovations, it is difficult to find the universally applicable feature quantities (such as slope and variance) of low-frequency signals, which makes it difficult to distinguish the normal state and arc fault state of the circuit from the low-frequency waveform. Currently, air core coils (Rogowski coils) are usually used to measure broadband, transient currents. [
26,
27]. In order to increase the magnitude of the output response and make the sensor operating frequency in the high-frequency band, some scholars have proposed using high-frequency magnetic materials such as the core of the air-core coil. These types of sensors are called high-frequency current transformer (HFCT) sensors. In the high-frequency band, the magnetic permeability of the core material of the HFCT sensor is several hundred times or even several thousand times larger than the vacuum magnetic permeability, which can improve the output response and effectively collect high-frequency signals. However, the high-frequency core has a non-linear change in magnetic permeability under alternating high current conditions, which limits the application of the HFCT sensor. [
28,
29,
30,
31]. If the core is saturated, the magnetic permeability will decrease rapidly, close to the permeability of the air. The smaller the measured current or the magnetic field strength of the core material, the closer the magnetic permeability is to the initial permeability (the initial permeability is a constant) [
30,
31]. That is to say, under low-magnetic flux density, the non-linearity of the high-frequency magnetic material is low, and the magnetic permeability is relatively constant.
Due to the limitation of the load impedance, the current value of the series arc fault ranges from 5 Amperes to 30 Amperes [
32]. For HFCT sensors, large currents produce large fluxes that cause the core to operate away from the linear working area. As the current changes, the magnetic permeability of the core changes non-linearly, causing severe distortion of the output waveform. Therefore, few papers have proposed the use of HFCT for arc fault detection. A common measure is to process the acquired analog signal through a complex algorithm (wavelet decomposition algorithm) or a filter circuit.
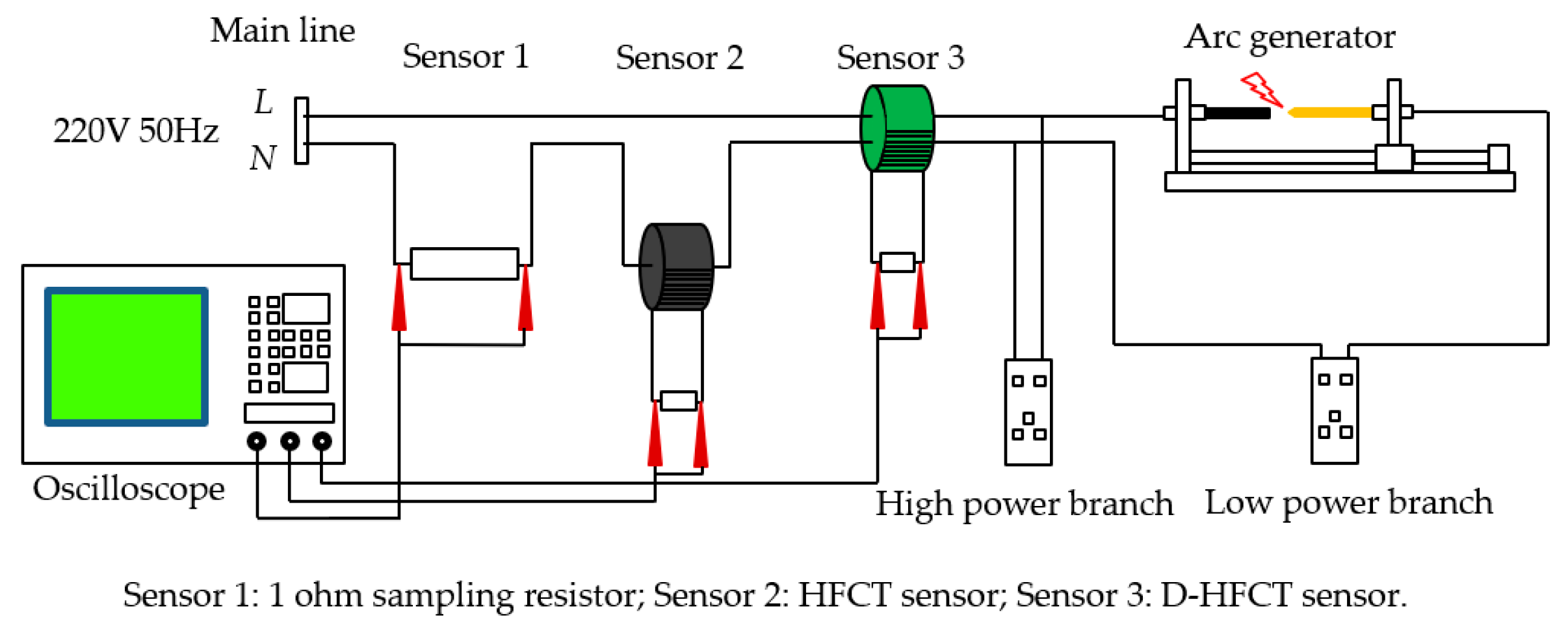
Suppose there are two parallel branches, one is a low-power arc fault branch and the other is a high-power normal branch. The current flowing through the main road is the sum of the currents of the two parallel branches. However, it is difficult to detect an arc fault on the main road because the current of the small power arc fault branch is negligible compared to the current of the high-power normal branch. We call this phenomenon the shielding effect of the high-power branch. The sensor placed on the main line cannot detect the occurrence of an arc fault and causes a missed judgment. However, it is uneconomical to place sensors on all branches to detect arc faults, and we expect sensors placed on the main line to detect all branch arc faults within its protection range.
In this paper, a novel high-frequency current sensor based on the differential threading method was put forward and used in low-voltage series arc fault detection. In Reference [
33], the residual magnetic flux caused by the asymmetry of the position of the live line and the neutral line was proposed as the measured physical quantity. However, the limitation of this method is that the asymmetry of the live and neutral lines is based on the fact that the secondary windings are not evenly wound around the entire core. Although that any winding method is not perfect is a well-known fact. In Reference [
33], no detailed analysis and explanation of the structure and material of the current transformer was made, but the key to this method lays in the structure of the transformer and the core material. In this paper, a non-uniform current sensor with differential threading method is proposed, which is a further improvement of the sensor used in Reference [
33]. Through numerical analysis, the influence of the structure of the sensor and the core material on the transmission characteristics of the sensor was quantitatively studied. The actual arc detection effect of the sensor was tested by self-made sensors and different single-load experiments and high-power shielding load experiments on the established arc experiment platform.
The differential threading method of HFCT proposed in this paper has two advantages:
- (1)
The amplitude of the equivalent magnetic flux induced by the high-frequency magnetic core is reduced, so that the core material works in the linear working area, and the waveform is hardly distorted. In this way, the sensor can acquire the high-frequency arc fault signal.
- (2)
For the fault signal shielding problem of the low-power fault branch caused by the high-power branch, the sensor placed on the main line can extract the low-power arc current signal because of the attenuation effect of the high-frequency core material on the low-frequency signal and the offset effect of the differential threading method on the magnetic flux.
This article is divided into five sections.
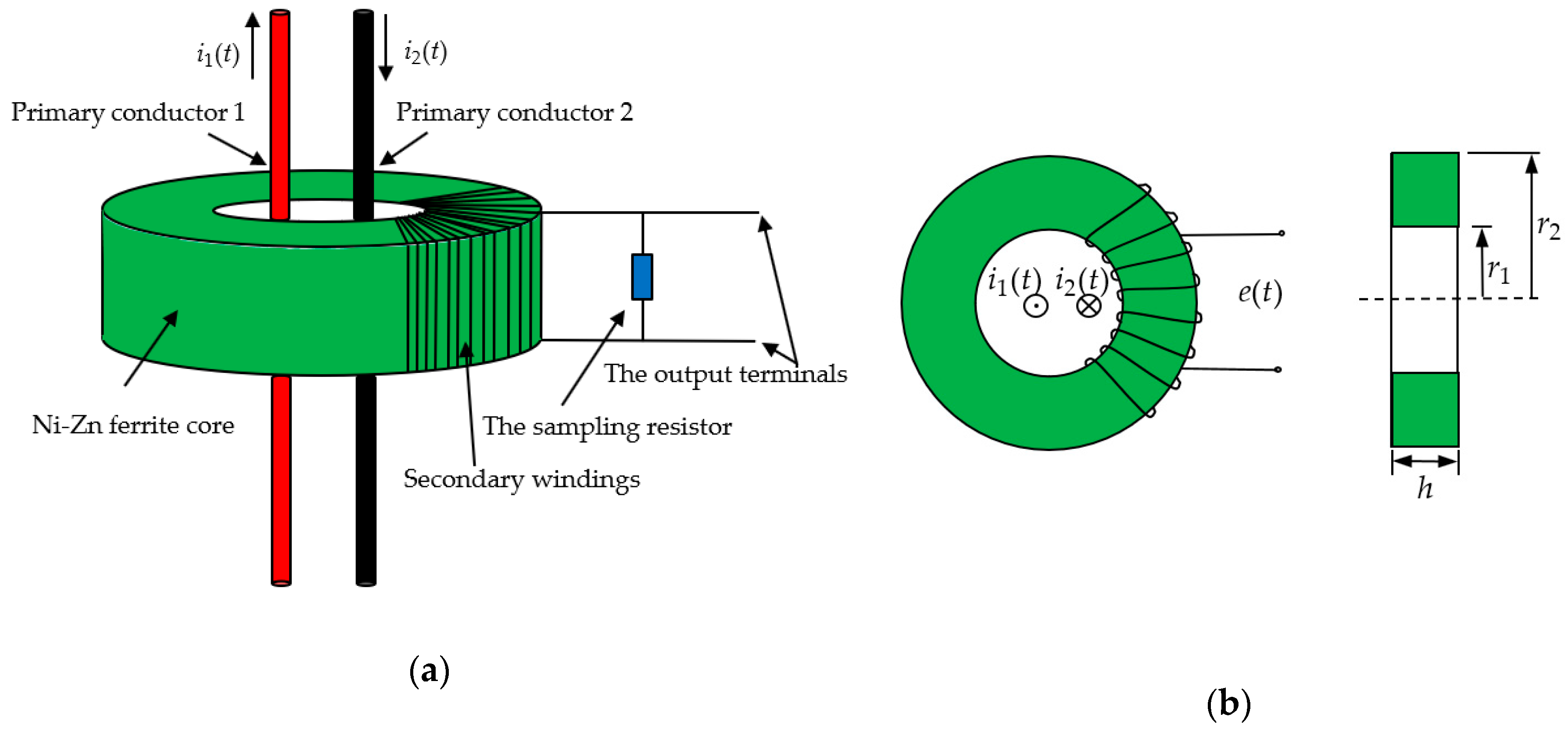
Section 2 illustrates the structural characteristics and working principle of the D-HFCT sensor;
Section 3 presents the equivalent circuit and transmission characteristics of the D-HFCT sensor and numerically analyzes the influence of the eccentricity of the primary conductor and the secondary windings parameters on the sensitivity of the sensor by means of commercial data software (matrix laboratory);
Section 4 verifies the D-HFCT sensor and designs a series arc fault simulation experiment system and various load experiments were carried out to test the practicability of the D-HFCT sensor. Finally, the conclusions and prospects of this paper are given in
Section 5.
3. Equivalent Circuit and Transmission Characteristics of the D-HFCT Sensor
3.1. Equivalent Circuit
The equivalent circuit of the D-HFCT sensor is shown in
Figure 8.
,
, and
are the internal resistance, self-inductance, and stray capacitance of the sensor, respectively.
is the measured current flowing through the primary conductors.
is the induced current flowing through the secondary windings.
is the mutual inductance.
is the induced voltage.
is the sampling resistor connected to the output terminals.
and
are currents flowing through
and
, respectively.
is the sampling voltage across the sampling resistor.
According to Kirchhoff’s law, the following expression can be derived from
Figure 8:
The ferrite core makes the sensor’s self-inductance larger, and the current flowing through the stray capacitance is much smaller than that flowing through the sampling resistor. Therefore, the sensor’s self-integration conditions (22) and (23) are easily satisfied.
Simplify Equations (19)–(23) to obtain Equation (24):
The output voltage collected by the sampling resistor is proportional to the current being measured, which is the same as the principle of measuring current with a shunt or a voltage divider resistor. It can also be seen from Equation (24) that the output voltage and the measured current are the same in frequency, but this does not mean that the frequency of the measured current can be arbitrary.
First, the sensor senses the measured current by the law of electromagnetic induction, so the measured current must be an alternating current, not a direct current. Secondly, the magnetization characteristics of the high-frequency magnetic material limit the allowable frequency band of the current to be measured. Finally, the actual operating frequency band is determined by the frequency response of the sensor.
3.2. Frequency Response
The most important characteristic of the D-HFCT sensor is the frequency response. The most important parameters are the cutoff frequency, bandwidth, and sensitivity of the sensor. These parameters depend on the structural parameters of the coil, and the specific parameter values of the sensor can be obtained through actual measurement.
Simplify Equations (19)–(21) to obtain Equation (25):
In order to derive the transfer function of the entire sensor measurement system, the time domain model of
Figure 8 needs to be converted into the
S domain model of
Figure 9 by means of the Laplace transform method. Performing a Laplace transform on Equation (25) yields:
Considering that the initial state of the system is zero, Equation (26) can be simplified to:
The transfer function of the D-HFCT sensor is:
According to the filter circuit, the transfer function of the second-order filter circuit is:
when
, the circuit is a second-order low-pass filter; when
, the circuit is a second-order high-pass filter; when
, the circuit is a second-order band-pass filter; when
, the circuit is a second-order band-stop filter. Therefore, one can determine that Equation (28) is a second-order band-pass filter circuit.
Taking the
in Equation (28), the amplitude-frequency response can be obtained as follows:
Analysis 1: When
, the corresponding resonant frequency and sensitivity are:
Analysis 2: When
or
, the corresponding amplitude-frequency responses are:
according to the −3 dB principle, the upper cutoff frequency, lower cutoff frequency, and bandwidth of the sensor can be determined.
It can be seen from Equations (32),(33), and (38)–(40) that the upper cutoff frequency, lower cutoff frequency, bandwidth and sensitivity of the sensor are determined by the coil parameters , , and and the sampling resistor of the sensor. Select the appropriate coil parameters and sampling resistor to adjust the frequency response of the sensor.
3.3. Influence of Conductor Eccentricity and Coil Parameters on Sensitivity
Equation (24) gives the output response of the sensor. The output voltage is proportional to the measured current, and the proportional coefficient (sensitivity) is approximately the ratio of the product of the mutual inductance and the sampling resistance to the self-inductance. Equation (24) can be rewritten as:
According to Equation (41), the factors affecting the sensitivity of the sensor include: (the coil turns of the secondary windings); (the angle occupied by the secondary windings); and (the eccentricities of the primary conductors); and (inner radius and outer radius of the core); (height of the core); (relative permeability of the core); (sampling resistor).
This section used Matrix Laboratory to simulate and analyze the influence of the eccentricities (, ) of the conductors and the structural parameters (, ) of the coil on the sensitivity of the sensor when the core parameters (, , ) and sampling resistor were fixed.
The parameters selected for the simulation were as follows: , , , , , , , , and the above geometrical dimensions were in millimeters. In the following analysis, when one of the parameters changed, the other parameters kept the above values unchanged.
3.3.1. The Number of Turns of the Secondary Windings
The number of turns of the coil directly affected the total flux linkage of the coil, thus affecting the mutual inductance and self-inductance of the coil. The following values were taken as the value of
: 10, 20, 30, 40, 50, 60, 70, 80, 90, 100. The corresponding sensitivities are shown in
Table 1.
When increased and did not change (the coil density increased), the sensitivity of the sensor gradually decreased, where coil density was the ratio of to .
The functional relationship derived from the power function approximation method based on the above calculation results was:
. The corresponding fitting curve is shown in
Figure 10. It can be seen that the relationship between the number of turns of the coil
and the sensitivity of the sensor was close to the inverse proportional function. As the number of turns of the coil increased, the corresponding sensitivity became smaller, and the response of the output also became smaller. The reason for exhibiting the above characteristics was that the increase in the number of turns of the coil had a greater influence on the self-inductance than on the mutual inductance. The self-inductance was proportional to the square of the turns of the coil, and the mutual inductance was proportional to the number of turns of the coil. It is worth noting that reducing the number of turns can increase the output response, but a decrease in the number of turns can cause a sharp decrease in the sensor’s self-inductance. Since the premise of Equation (24) is Equation (22), the sensor’s self-inductance is reduced to a certain extent, and Equation (22) will not be satisfied, which means that the number of turns cannot be chosen too small.
3.3.2. Distribution Angle of the Secondary Windings
The effect of the angle
occupied by the secondary windings on the sensitivity is shown in
Table 2, and the step of the angle changes was
. When
increased and
did not change, the coil density and the sensitivity decreased.
The functional relationship obtained by least squares fitting based on the above results was:
. The corresponding fitting curve is shown in
Figure 11. The angle occupied by the secondary winding was inversely related to the sensitivity of the sensor. In order to ensure that the output response of the sensor was large enough, the angle
should be small, but it should be noted that the angle
should not be extremely small. The closer the coil distance, the larger the inter-turn capacitance of the sensor, and the smaller the upper cutoff frequency of the sensor.
It can be seen from Equations (24) and (41) that the distribution angle of the secondary windings is only related to the mutual inductance of the sensor. The relationship between the coil distribution angle and the sensitivity can also be regarded as the relationship between the coil distribution angle and the mutual inductance, because the self-inductance did not change with the coil distribution angle. The effect of the angle
occupied by the secondary windings on the mutual inductance is shown in
Figure 12, and the step of the angle changes is
.
3.3.3. Eccentricities of the Primary Conductors
The previous discussions assumed that the eccentricities of the two primary conductors were the same. In this section, the three cases shown in
Figure 13 will be analyzed.
Case 1: The primary conductor 2 was fixed (eccentricity ), the eccentricity of primary conductor 1 changed from to , and the step of eccentricity change was 0.1.
Case 2: The primary conductor 1 was fixed (eccentricity ), the eccentricity of primary conductor 2 changed from to , and the step of eccentricity change was 0.1.
Case 3: The eccentricities of the primary conductors 1 and 2 changed from 0.1 to 0.9 at the same time, and the step size of the change was 0.1.
The eccentricity of the primary conductor was independent of the sensor’s self-inductance and only affected the mutual inductance of the sensor. According to Equation (24), the influence of the eccentricity of the primary conductor on the mutual inductance was the same as its influence on the sensitivity.
The mutual inductance values in the above cases are given in
Table 3.
As can be seen from the above table data, the positions of the primary conductors had an effect on the mutual inductance of the sensor, which is the sacrifice one has to make in order to make the core work in the linear working area. It can be seen from the calculation data that when the eccentricity of the primary conductor increased, the residual magnetic field of the two differential primary conductors gradually increased, and the corresponding mutual inductance gradually increased. A large eccentricity was needed to achieve greater mutual inductance and sensitivity. It is worth considering that if the eccentricity of a conductor is too large, it means that the conductor is closer to the core, which will cause local saturation of the core and affect the normal measurement of the sensor. Therefore, in the subsequent experimental part, the eccentricity was selected at a medium level (,).




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}