An Approach to Dynamic Sensing Data Fusion


Abstract
:1. Introduction
2. Dynamic Acquisition and Fusion
2.1. Data Change Decision
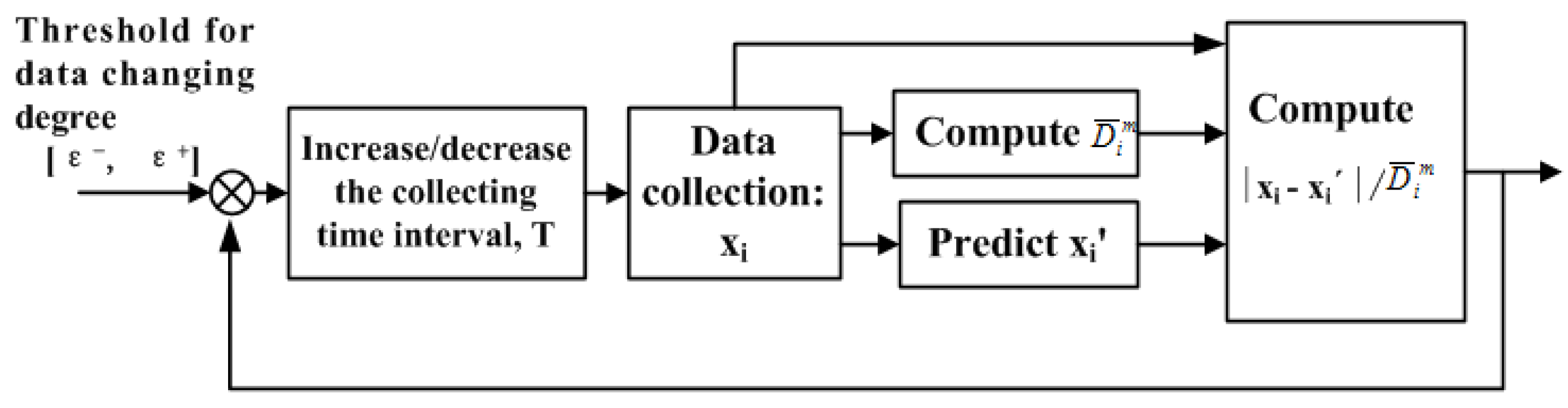
2.2. Dynamic Regulation
- First step: Initialize system and define the size of the collection window, data changing degree threshold, and size of the acquisition time slice.
- Second step: Start the timer and make the timeinterval of the timer equal to the acquisition timeinterval.
- Third step: Conduct the data acquisition.
- Fourth step: Collect the data in the acquisition window and compute the variance and predict the value of the next acquisition point.
- Fifth step: Collect the next data point and conduct comparison with the predicted value and compute the relative changing degree.
- Sixth step: Judge according to the changing degree, i.e., if the changing degree is larger than the given maximum threshold, decrease the current collection timeinterval; if the changing degree is smaller than the given minimum threshold, increase the current acquisition timeinterval.
- Seventh step: Modify the current timeinterval of the timer and make it equal to the new acquisition timeinterval.
- Eighth step: Execute steps 3–7 repeatedly until the end of data collection.
| Algorithm 1. Dynamic Adjustment Algorithm of Acquisition Time Interval |
| Input: m, size of acquisition window; [ε−, ε+], threshold of data changing degree; T, acquisition timeinterval; Δτ, acquisition time slice; alpha, threshold of confidence; |
| Output: S, acquisition dataset; |
| Design of algorithm: |
| (1) Initialization (m, [ε−, ε+], Δτ); //System initialization |
| (2) Start the timer with T; //Start the timer with collection timeinterval T |
| (3) while (acquisition is not terminated) { //data acquisition loop |
| (4) S ← conduct collection; |
| (5) W ← get data (S, m); //get the collect data to W |
| (6) Wvar = var(W); //compute the variance of the dataset W |
| (7) x’←regress_predict(W, alpha); //predict by regress method |
| (8) x ← sampling(S); //collect the value of the next point |
| (9) if(|x - x’| / Wvar> ε+) { |
| (10) T = T – Δτ; //Decrease the acquisition timeinterval |
| (11) }else if(|x - x’| / War < ε−) { |
| (12) T = T + Δτ; //Increase the acquisition timeinterval |
| (13) } |
| (14) } //The system converges or runs the prescribed iteration steps |
3. Sensor Data Acquisition System
3.1. System Composition
3.2. Sensing Data Acquisition
- (1)
- Location identification: data obtained from the sensor of the global positioning system (GPS) receiver
- (2)
- Number of satellites: data obtained from the sensor of the GPS receiver
- (3)
- Control pattern: data obtained from the ground control station
- (4)
- Type of reception: data obtained from the ground control station
- (5)
- Identification of reception: data obtained from the sensor of the RC receiver
- (6)
- Mark of automatic aerial photography: data obtained from the ground control station
- (7)
- Mark of cycling route: data obtained from the ground control station
- (8)
- Flight mode: data obtained from the sensor of the RC remote controller and the ground control station
- (9)
- Types of taking off and landing: data obtained from the sensor of the RC remote controller and ground control station
- (10)
- Longitude and latitude: data obtained from the sensor of the GPS receiver
- (11)
- Heading: data obtained from the sensor of the autopilot
- (12)
- Speed: data obtained from the sensor of the autopilot
- (13)
- GPS altitude: data obtained from the sensor of the GPS receiver
- (14)
- Barometric height: data obtained from the sensor of the autopilot
- (15)
- Distance to the destination waypoint: data obtained from the sensor of the autopilot
- (16)
- Lateral deviation distance: data obtained from the sensor of the autopilot
4. Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kumar, N.; Dash, D. Mobile data sink-based time-constrained data collection from mobile sensors: A heuristic approach. IET Wirel. Sens. Syst. 2018, 8, 129–135. [Google Scholar] [CrossRef]
- Tukiran, Z.; Ahmad, A. Exploiting LabVIEW FPGA in Implementation of Real-Time Sensor Data Acquisition for Rowing Monitoring System. In Proceedings of the 3rd International Conference on Soft Computing and Data Mining (SCDM), Johor, Malaysia, 6–7 February 2018; Volume 8, pp. 272–281. [Google Scholar]
- Shi, C.; Zou, B.; Cai, M.; Meng, Z.; Chen, Z. Adaptive Asynchronous Sampling Based Motion Data Compression. Acta Electron. Sin. 2012, 40, 128–133. [Google Scholar]
- Silvestri, E.E.; Yund, C.; Taft, S. Considerations estimating microbial environmental data concentrations collected from a field setting. J. Expo. Sci. Environ. Epidemiol. 2017, 27, 141–151. [Google Scholar] [CrossRef] [PubMed]
- Vidya, T.N.C. Large, secondarily collected data in biological and environmental sciences. Curr. Sci. 2014, 106, 802–803. [Google Scholar]
- Kenny, L.C.; Thorpe, A.; Stacey, P. A collection of experimental data for aerosol monitoring cyclones. Aerosol Sci. Technol. 2017, 51, 1190–1200. [Google Scholar] [CrossRef] [Green Version]
- Finke, A.D.; Panepucci, E.; Vonrhein, C. Advanced Crystallographic Data Collection Protocols for Experimental Phasing. Methods Mol. Biol. 2016, 1320, 175–191. [Google Scholar] [PubMed]
- Bosse, J.D.; Leblanc, R.G.; Jackman, K. Benefits of Implementing and Improving Collection of Sexual Orientation and Gender Identity Data in Electronic Health Records. Comput. Inform. Nurs. 2018, 36, 267–274. [Google Scholar] [CrossRef] [PubMed]
- Naven, L.; Inglis, G.; Harris, R. Right Here Right Now (RHRN) pilot study: Testing a method of near-real-time data collection on the social determinants of health. Evid. Policy 2018, 14, 301–321. [Google Scholar] [CrossRef]
- Parvardeh, A.; Balakrishnan, N. On Mixed Delta-Shock Models. Stat. Probab. Lett. 2015, 102, 51–60. [Google Scholar] [CrossRef]
- Liu, W.; Zhan, B.; Zhang, Z.W. Model Selection in Finite Mixture of Regression Models: A Bayesian Approach with Innovative Weighted G Priors and Reversible Jump Markov Chain Monte Carlo Implementation. J. Stat. Comput. Simul. 2015, 85, 2456–2478. [Google Scholar] [CrossRef]
- Shiravi, A.; Shiravi, H.; Tavallaee, M.; Ghorbani, A.A. Toward Developing a Systematic Approach to Generate Benchmark Datasets for Intrusion Detection. Comput. Secur. 2012, 31, 357–374. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Y.F.; Lamont, L.; Yu, F.R.; Rabbath, C.A. Swarm Mobility and Its Impact on Performance of Routing Protocols in MANETs. Comput. Commun. 2012, 35, 709–719. [Google Scholar] [CrossRef]
- Zou, Z.Y. Non-Singular Fixed-Time Terminal Sliding Mode Control of Non-Linear Systems. IET Control Theory Appl. 2015, 9, 545–552. [Google Scholar]
- Hens, A.B.; Tiwari, M.K. Computational Time Reduction for Credit Scoring: An Integrated Approach Based on Support Vector Machine and Stratified Sampling Method. Expert Syst. Appl. 2012, 39, 6774–6781. [Google Scholar] [CrossRef]
- Guttman, M.M.; Roberts, G.W. Sampled-Data Iir Filtering via Time-Mode Signal Processing. Analog Integr. Circuits Signal Process. 2012, 71, 495–506. [Google Scholar] [CrossRef]
- Yin, Y.F.; Wang, X.N.; Guan, H.C.; Zeng, Y.F. Online Joint Control Approach to Formation Flying Simulation. IEEE Aerosp. Electron. Syst. 2014, 29, 24–36. [Google Scholar]
- Byun, S.-W.; Lee, S.-P. Hand Gesture Recognition Suitable for Wearable Devices using Flexible Epidermal Tactile Sensor Array. J. Electr. Eng. Technol. 2018, 13, 1731–1738. [Google Scholar]
- Farley, B.; Bullock, A.; Kaul, I. Validation of a Wearable Device for Continuous Tremor Measurement in Parkinson’s Disease and Essential Tremor. Mov. Disord. 2018, 33, S66–S67. [Google Scholar]
- Kuan, J.-Y.; Pasch, K.A.; Herr, H.M. A High-Performance Cable-Drive Module for the Development of Wearable Devices. IEEE/ASME Trans. Mechatron. 2018, 23, 1238–1248. [Google Scholar] [CrossRef]
- Liu, L.; Wang, S.; Hu, B.; Qiong, Q.Y.; Wen, J.H.; Rosenblum, D.S. Learning structures of interval-based Bayesian networks in probabilistic generative model for human complex activity recognition. Pattern Recognit. 2018, 81, 545–561. [Google Scholar] [CrossRef]
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: State-of-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [Google Scholar] [CrossRef]
- Fortino, G.; Galzarano, S.; Gravina, R.; Li, W.F. A framework for collaborative computing and multi-sensor data fusion in body sensor networks. Inf. Fusion 2016, 22, 50–70. [Google Scholar] [CrossRef]
- Fortino, G.; Parisi, D.; Pirrone, V.; Di Fatta, G. BodyCloud: A SaaS approach for community Body Sensor Networks. Future Gener. Comput. Syst. 2014, 35, 62–79. [Google Scholar] [CrossRef] [Green Version]
- Fortino, G.; Giannantonio, R.; Gravina, R.; Kuryloski, P.; Jafari, R. Enabling Effective Programming and Flexible Management of Efficient Body Sensor Network Applications. IEEE Trans. Hum. Mach. Syst. 2013, 43, 115–133. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Content | Fixed Acquisition Interval | Dynamic TimeInterval | Improvement (%) | ||
|---|---|---|---|---|---|
| Sampling Interval (ms) | Deviation to the Desired Value | Sampling Interval (ms) | Deviation to the Desired Value | ||
| Heading experiment | 10 | 512.0 | Dynamic | 125.0 | 309.6 |
| Speed experiment | 10 | 51.4 | Dynamic | 41.2 | 24.8 |
| GPS altitude | 10 | 37.6 | Dynamic | 27.8 | 35.3 |
| Barometer height | 10 | 41.7 | Dynamic | 39.2 | 6.4 |
| Distance to waypoint | 10 | 682.7 | Dynamic | 122.8 | 455.9 |
| Lateral deviation Distance experiment | 10 | 75.4 | Dynamic | 23.4 | 222.2 |
| Locating identification | 10 | 450 | Dynamic | 180 | 150.0 |
| Number of satellites | 10 | 0 | Dynamic | 0 | 0 |
| Control mode | 10 | 0 | Dynamic | 0 | 0 |
| Reception types | 10 | 0 | Dynamic | 0 | 0 |
| Reception identification | 10 | 0 | Dynamic | 0 | 0 |
| Automatic photography | 10 | 0 | Dynamic | 0 | 0 |
| Cycling route identification | 10 | 0 | Dynamic | 0 | 0 |
| Flight pattern | 10 | 0 | Dynamic | 0 | 0 |
| Types of taking off and landing | 10 | 0 | Dynamic | 0 | 0 |
| Longitude and latitude | 10 | 5.8 | Dynamic | 1.2 | 383.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Y.; Guan, L.; Zheng, C. An Approach to Dynamic Sensing Data Fusion. Sensors 2019, 19, 3668. https://doi.org/10.3390/s19173668
Yin Y, Guan L, Zheng C. An Approach to Dynamic Sensing Data Fusion. Sensors. 2019; 19(17):3668. https://doi.org/10.3390/s19173668
Chicago/Turabian StyleYin, Yunfei, Liufa Guan, and Chengen Zheng. 2019. "An Approach to Dynamic Sensing Data Fusion" Sensors 19, no. 17: 3668. https://doi.org/10.3390/s19173668
APA StyleYin, Y., Guan, L., & Zheng, C. (2019). An Approach to Dynamic Sensing Data Fusion. Sensors, 19(17), 3668. https://doi.org/10.3390/s19173668