Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon using Time Lapse Photogrammetry


 ,
,
Abstract
:1. Introduction
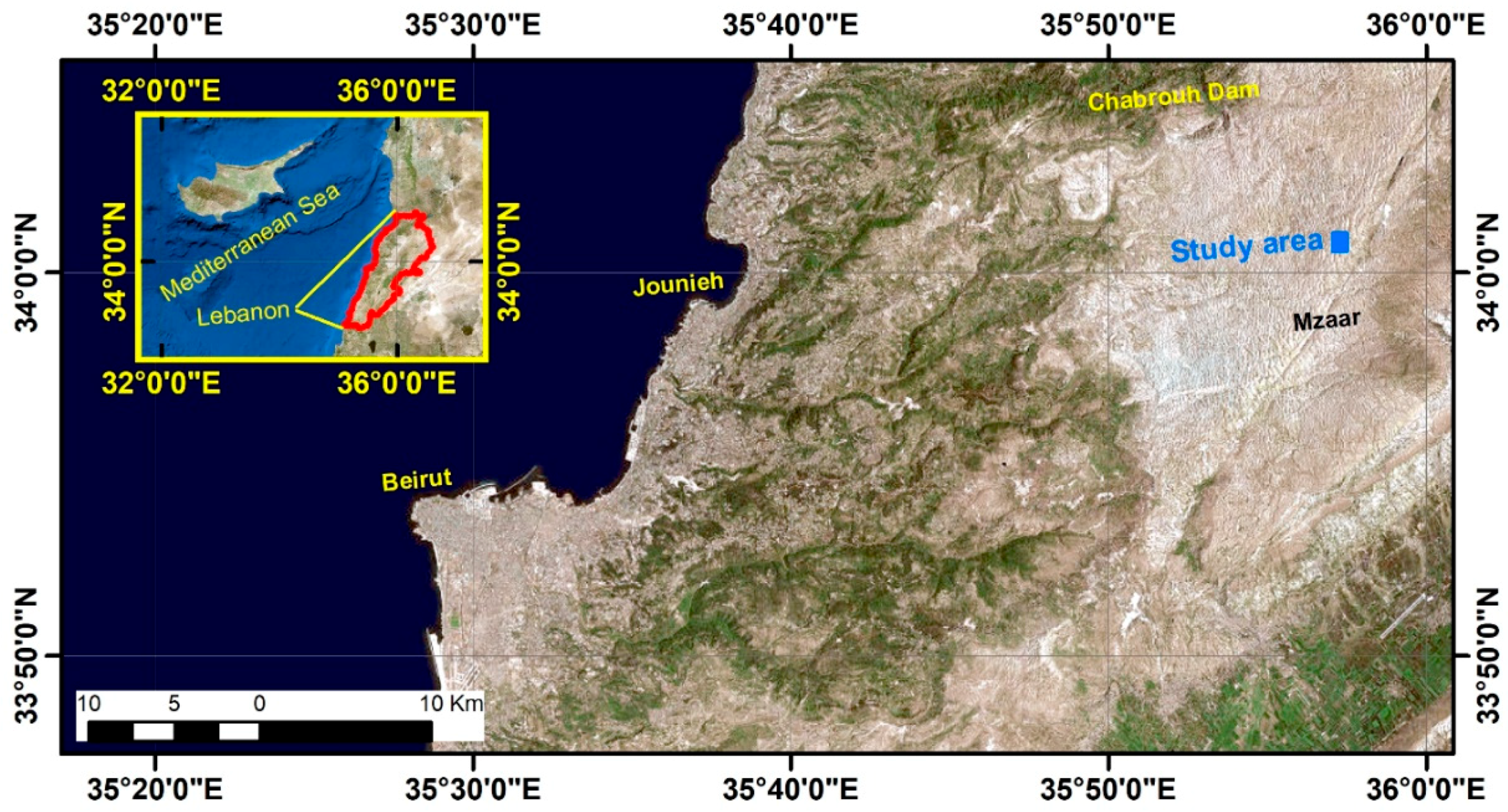
2. Study Area
3. Method
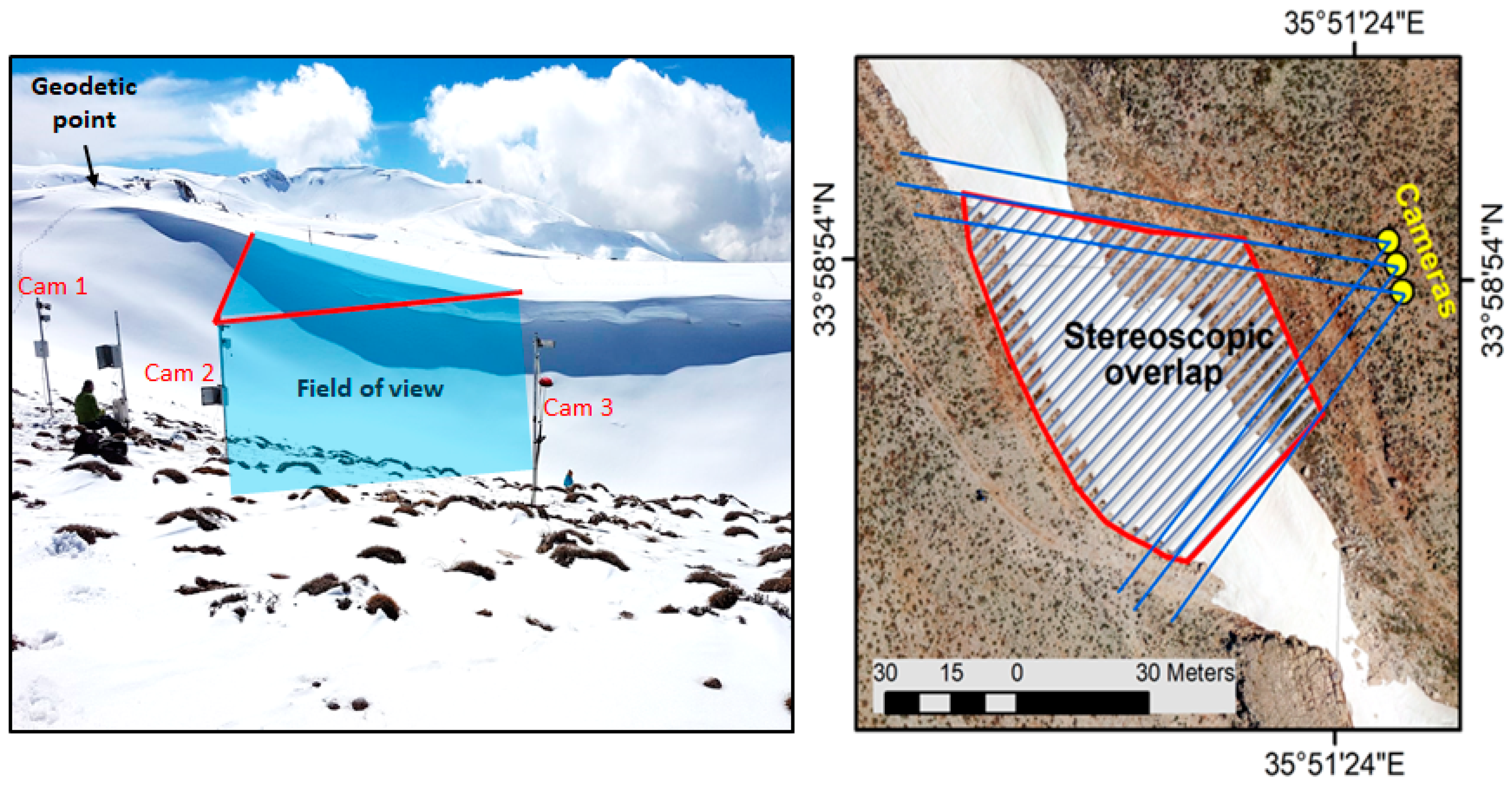
3.1. System Setup
3.2. Photogrammetric Processing
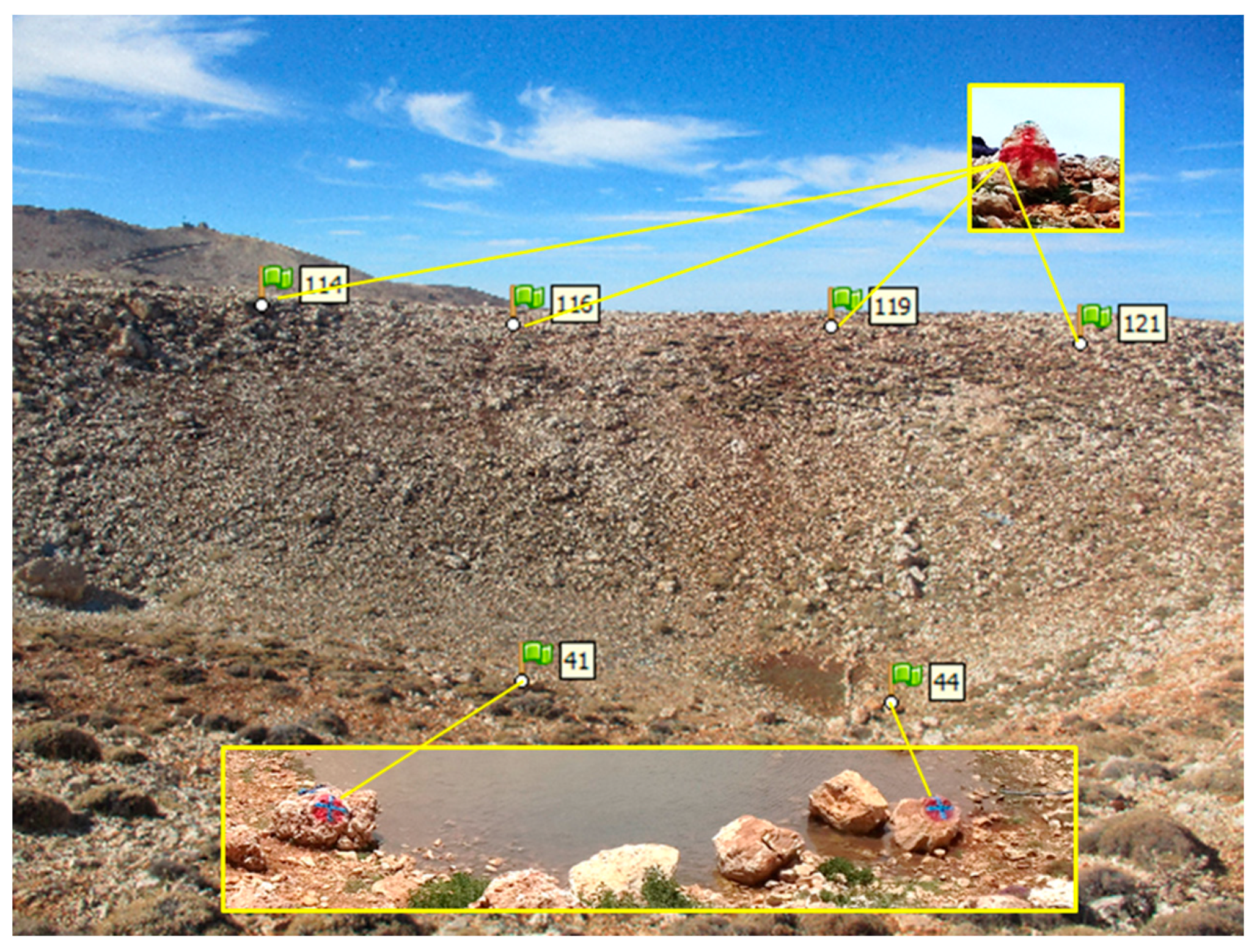
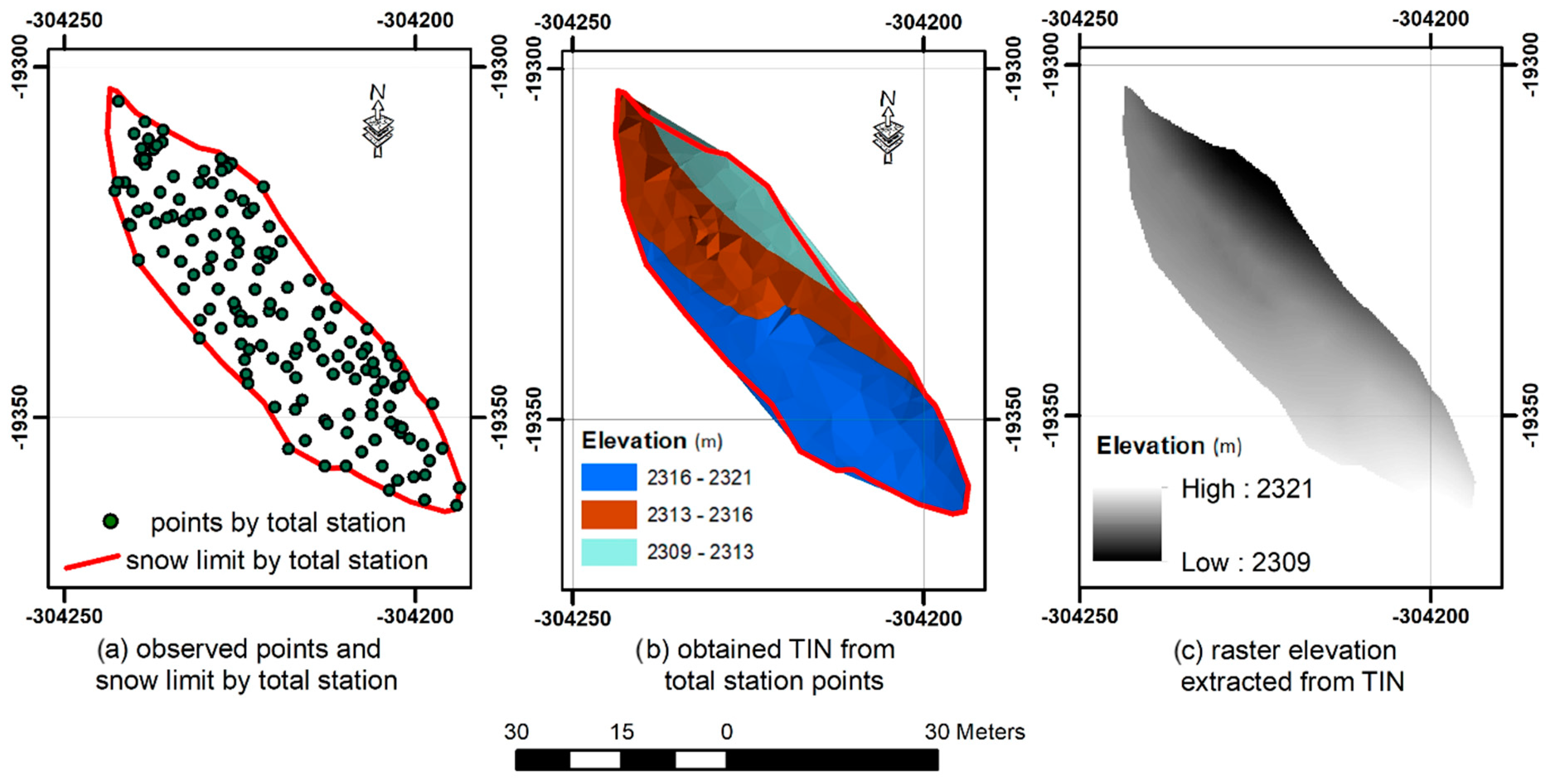
3.3. Ground Truth Measurements
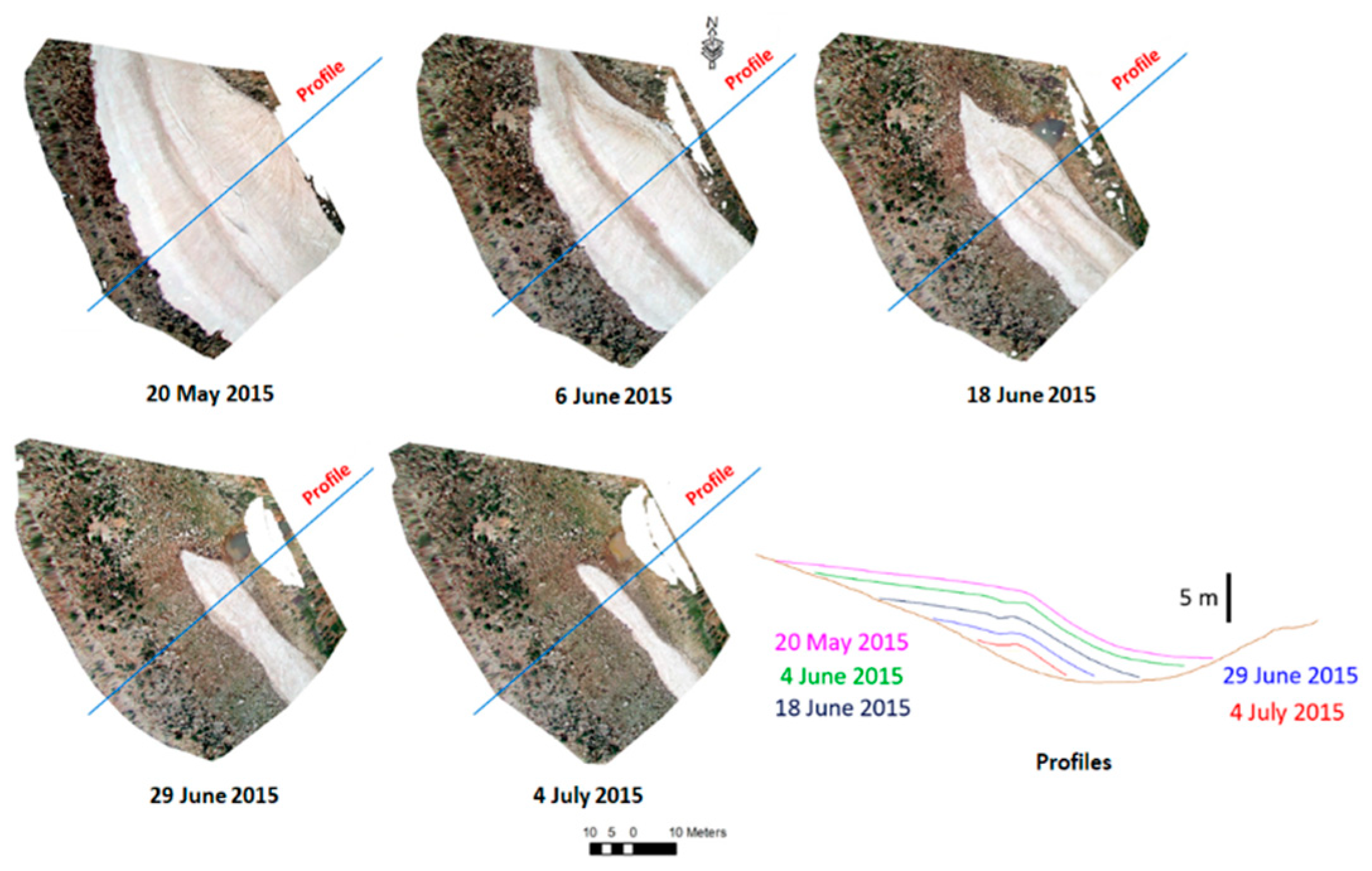
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A



References
- Baylouny, A.M.; Klingseis, S.J. Water thieves or Political catalysts? syrian refugees in Jordan and Lebanon. Middle east Policy 2018, 25, 104–123. [Google Scholar] [CrossRef]
- Shaban, A.; Faour, G.; Khawlie, M.; Abdallah, C. Remote sensing application to estimate the volume of water in the form of snow on Mount Lebanon/Application de la télédétection à l’estimation du volume d’eau sous forme de neige sur le Mont Liban. Hydrol. Sci. J. 2004, 49, 37–41. [Google Scholar] [CrossRef]
- Shaban, A.; Dariwich, T. Investigating snow characteristics on mountain chains of Lebanon. In Proceedings of the First CIGR Inter-regional Conference on Land and Water Challenges, Bari, Italy, 10–14 September 2013. [Google Scholar]
- Telesca, L.; Shaban, A.; Gascoin, S.; Darwich, T.; Drapeau, L.; El Hage, M.; Faour, G. Characterization of the time dynamics of monthly satellite snow cover data on Mountain Chains in Lebanon. J. Hydrol. 2014, 519, 3214–3222. [Google Scholar] [CrossRef]
- Mhawej, M.; Faour, G.; Fayad, A.; Shaban, A. Towards an enhanced method to map snow cover areas and derive snow-water equivalent in Lebanon. J. Hydrol. 2014, 513, 274–282. [Google Scholar] [CrossRef]
- Somma, J.; Drapeau, L.; Abou Chakra, C. Caractérisation de la capacité de rétention de neige d’un plateau karstique. Essai méthodologique pour le plateau du Jabal Jraid (Liban). Revue internationale de géomatique 2014, 24, 87–99. [Google Scholar] [CrossRef]
- Fayad, A.; Gascoin, S.; Faour, G.; Fanise, P.; Drapeau, L.; Somma, J.; Fadel, A.; Al Bitar, A.; Escadafal, R. Snow observations in Mount Lebanon (2011–2016). Earth Syst. Sci. Data 2017, 9, 573–587. [Google Scholar] [CrossRef]
- Dubertret, L. Carte Géologique du Liban. Available online: https://www.worldcat.org/title/carte-geologique-du-liban/oclc/21747724 (accessed on 9 September 2019).
- Edgell, H.S. Karst and hydrogeology of Lebanon. Carbonates Evaporites 1997, 12, 220. [Google Scholar] [CrossRef]
- Fayad, A.; Gascoin, S.; Faour, G.; López-Moreno, J.I.; Drapeau, L.; Le Page, M.; Escadafal, R. Snow hydrology in Mediterranean mountain regions: A review. J. Hydrol. 2017, 551, 374–396. [Google Scholar] [CrossRef]
- Jonas, T.; Marty, C.; Magnusson, J. Estimating the snow water equivalent from snow depth measurements in the Swiss Alps. J. Hydrol. 2009, 378, 161–167. [Google Scholar] [CrossRef]
- López-Moreno, J.I.; Fassnacht, S.R.; Heath, J.T.; Musselman, K.N.; Revuelto, J.; Latron, J.; Morán-Tejeda, E.; Jonas, T. Small scale spatial variability of snow density and depth over complex alpine terrain: Implications for estimating snow water equivalent. Adv. Water Resour. 2013, 55, 40–52. [Google Scholar] [CrossRef]
- Sturm, M.; Taras, B.; Liston, G.E.; Derksen, C.; Jonas, T.; Lea, J.; Sturm, M.; Taras, B.; Liston, G.E.; Derksen, C.; et al. Estimating Snow Water Equivalent Using Snow Depth Data and Climate Classes. J. Hydrol. 2010, 11, 1380–1394. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Bösch, R.; Stoffel, A. Mapping snow depth in alpine terrain with unmanned aerial systems (UASs): Potential and limitations. Cryosphere 2016, 10, 1075–1088. [Google Scholar] [CrossRef]
- Marti, R.; Gascoin, S.; Berthier, E.; De Pinel, M.; Houet, T.; Laffly, D. Mapping snow depth in open alpine terrain from stereo satellite imagery. Cryosphere 2016, 10, 1361–1380. [Google Scholar] [CrossRef] [Green Version]
- Deems, J.S.; Painter, T.H.; Finnegan, D.C. Lidar measurement of snow depth: A review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef]
- Garvelmann, J.; Pohl, S.; Weiler, M. From observation to the quantification of snow processes with a time-lapse camera network. Hydrol. Earth Syst. Sci. 2013, 17, 1415–1429. [Google Scholar] [CrossRef] [Green Version]
- Lui, J.; Chen, R.; Wang, G. Snowline and snow cover monitoring at high spatial resolution in a mountainous river basin based on a time-lapse camera at a daily scale. J. Mt Sci. 2015, 12, 60–69. [Google Scholar]
- Kępski, D.; Luks, B.; Migała, K.; Wawrzyniak, T.; Westermann, S.; Wojtuń, B. Terrestrial Remote Sensing of Snowmelt in a Diverse High-Arctic Tundra Environment Using Time-Lapse Imagery. Remote Sens. 2017, 9, 733. [Google Scholar] [CrossRef]
- Parajka, J.; Haas, P.; Kirnbauer, R.; Jansa, J.; Blöschl, G. Potential of time-lapse photography of snow for hydrological purposes at the small catchment scale. Hydrol. Processes 2012, 26, 3327–3337. [Google Scholar] [CrossRef]
- Revuelto, J.; Jonas, T.; López-Moreno, J.I. Backward snow depth reconstruction at high spatial resolution based on time-lapse photography. Hydrol. Processes 2016, 30, 2976–2990. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Processes Landforms 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Structure from Motion (SfM) Photogrammetry. In Geomorphological Techniques (Online Edition); Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2015; Chap. 2. [Google Scholar]
- Morgan, J.A.; Brogan, D.J.; Nelson, P.A. Application of Structure-from-Motion photogrammetry in laboratory flumes. Geomorphology 2017, 276, 125–143. [Google Scholar] [CrossRef] [Green Version]
- Balaguer-Puig, M.; Marqués-Mateu, Á.; Lerma, J.L.; Ibáñez-Asensio, S. Estimation of small-scale soil erosion in laboratory experiments with Structure from Motion photogrammetry. Geomorphology 2017, 295, 285–296. [Google Scholar] [CrossRef]
- Mertes, J.R.; Gulley, J.D.; Benn, D.I.; Thompson, S.S.; Nicholson, L.I. Using structure-from-motion to create glacier DEMs and orthoimagery from historical terrestrial and oblique aerial imagery. Earth Surf. Processes Landforms 2017, 42, 2350–2364. [Google Scholar] [CrossRef]
- Cimoli, E. Determining Snow Depth Distribution from Unmanned Aerial Vehicles and Digital Photogrammetry. Master’s Thesis, Technical University of Denmark, Kongens Lyngby, Denmark, August 2015. [Google Scholar]
- Brunier, G.; Fleury, J.; Anthony, E.J.; Gardel, A.; Dussouillez, P. Close-range airborne Structure-from-Motion Photogrammetry for high-resolution beach morphometric surveys: Examples from an embayed rotating beach. Geomorphology 2016, 261, 76–88. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy assessment of digital surface models from Unmanned Aerial Vehicles’ imagery on glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- Nissen, E.; Krishnan, A.K.; Arrowsmith, J.R.; Saripalli, S. Three-dimensional surface displacements and rotations from differencing pre-and post-earthquake LiDAR point clouds. Geophys. Res. Lett. 2012, 39, 1–6. [Google Scholar] [CrossRef]
- He, Y.; Liang, B.; Yang, J.; Li, S.; He, J. An Iterative Closest Points Algorithm for Registration of 3D Laser Scanner Point Clouds with Geometric Features. Sensors 2017, 17, 1862. [Google Scholar] [CrossRef]
- Teza, G.; Galgaro, A.; Zaltron, N.; Genevois, R. Terrestrial laser scanner to detect landslide displacement fields: A new approach. Int. J. Remote Sens. 2007, 28, 3425–3446. [Google Scholar] [CrossRef]
- Shean, D.; Alexandrov, O.; Moratto, Z.; Smith, B.; Joughin, I. An automated, open-source pipeline for mass production of digital elevation models (DEMs) from very-high-resolution commercial stereo satellite imagery. ISPRS J. Photogramm. Remote Sens. 2016, 116, 101–117. [Google Scholar] [CrossRef] [Green Version]
- Lavine, A.; Gardner, J.N.; Reneau, S.L. Total station geologic mapping: An innovative approach to analyzing surface-faulting hazards. Eng. Geol. 2003, 70, 71–91. [Google Scholar] [CrossRef]
- Wolf, D.G.P.R. Elementary Surveying; Pearson: Essex, UK, 2014. [Google Scholar]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the accuracy of high resolution digital surface models computed by PhotoScan® and MicMac® in sub-optimal survey conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Snow-off DEM Source Imagery | Snow-on DEM Source Imagery | Method to Register Snow-on DEM | |
|---|---|---|---|
| Exp. 1 | cameras | cameras | GCP |
| Exp. 2 | cameras | cameras | ICP |
| Exp. 3 | drone | cameras | ICP |
| Date | Number of Points |
|---|---|
| 8 May 2019 | 210 |
| 20 May 2019 | 250 |
| 4 June 2019 | 219 |
| 18 June 2019 | 140 |
| 29 June 2019 | 168 |
| 4 July 2019 | 92 |
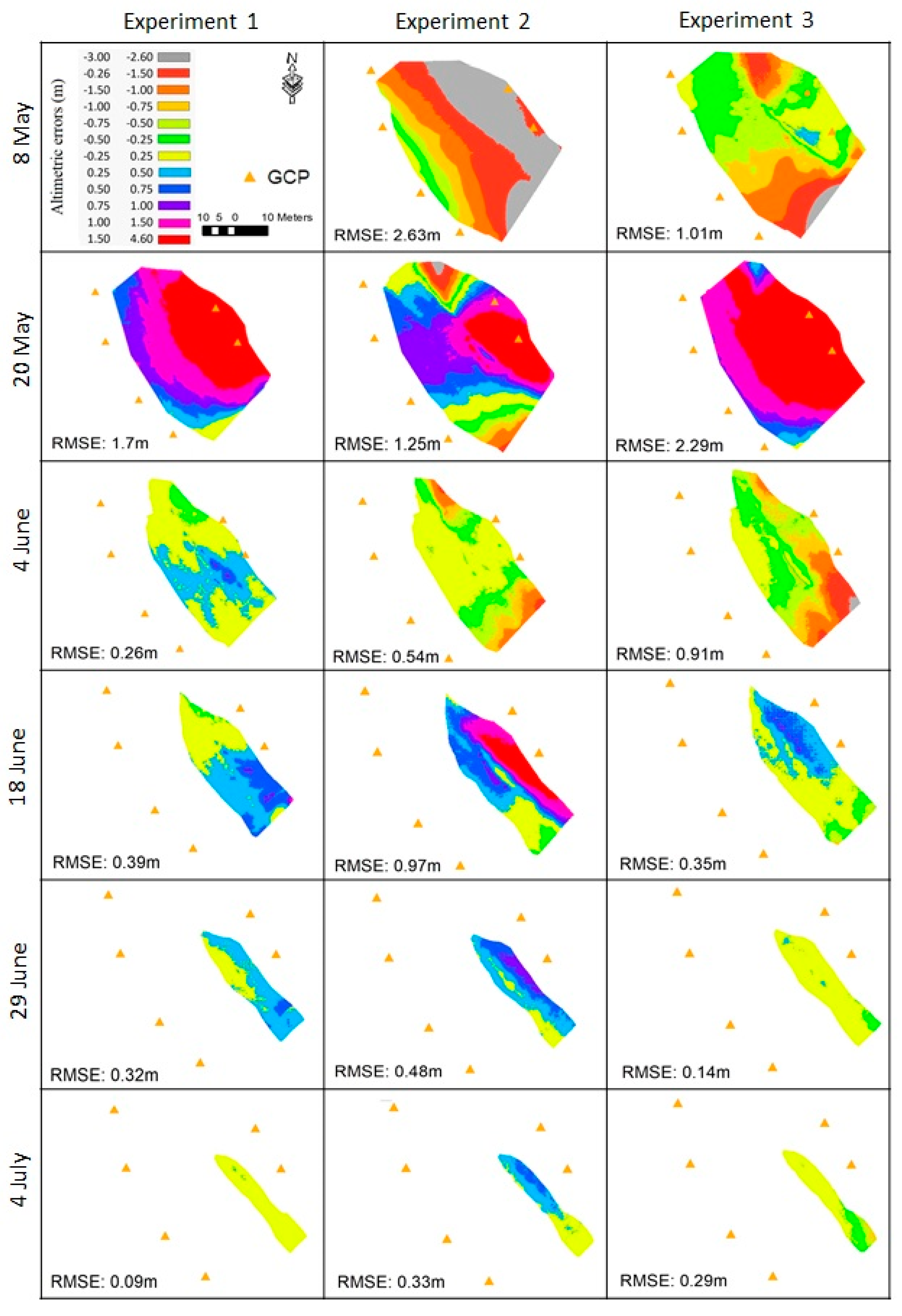
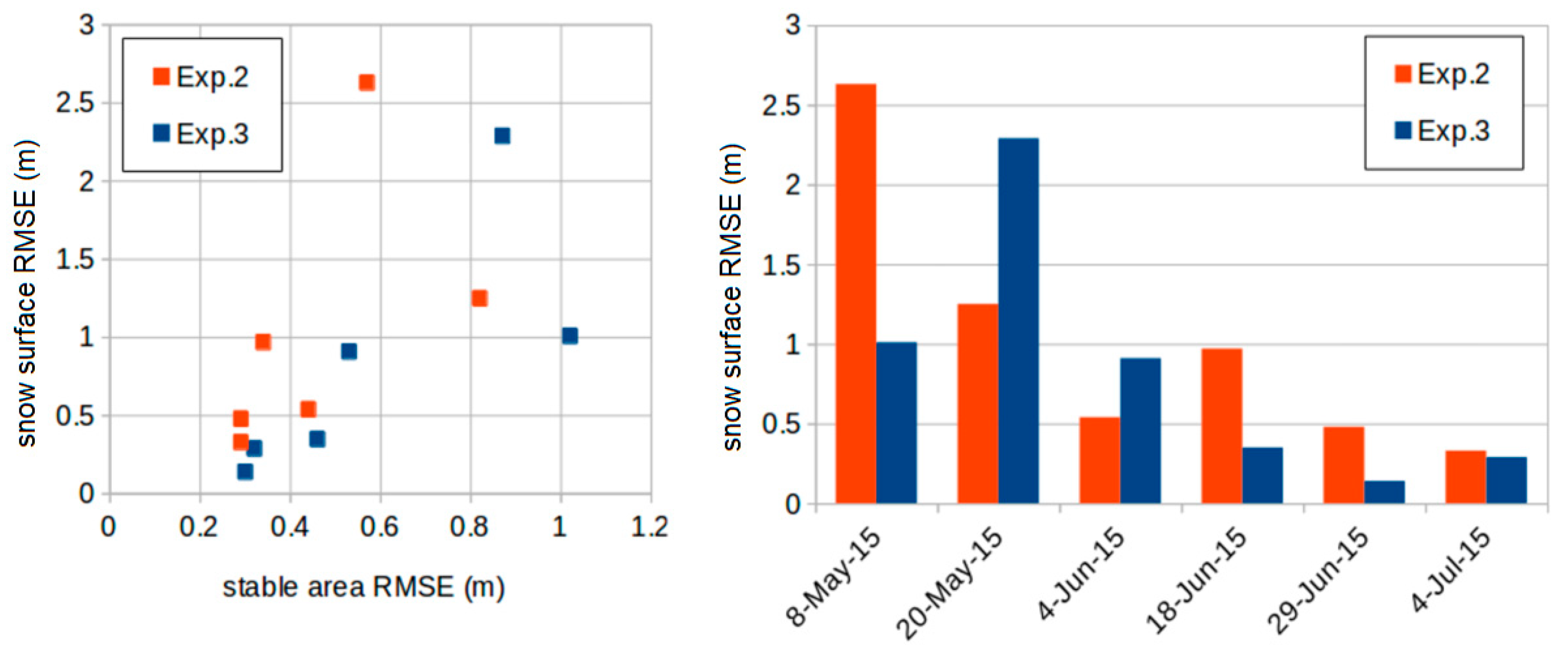
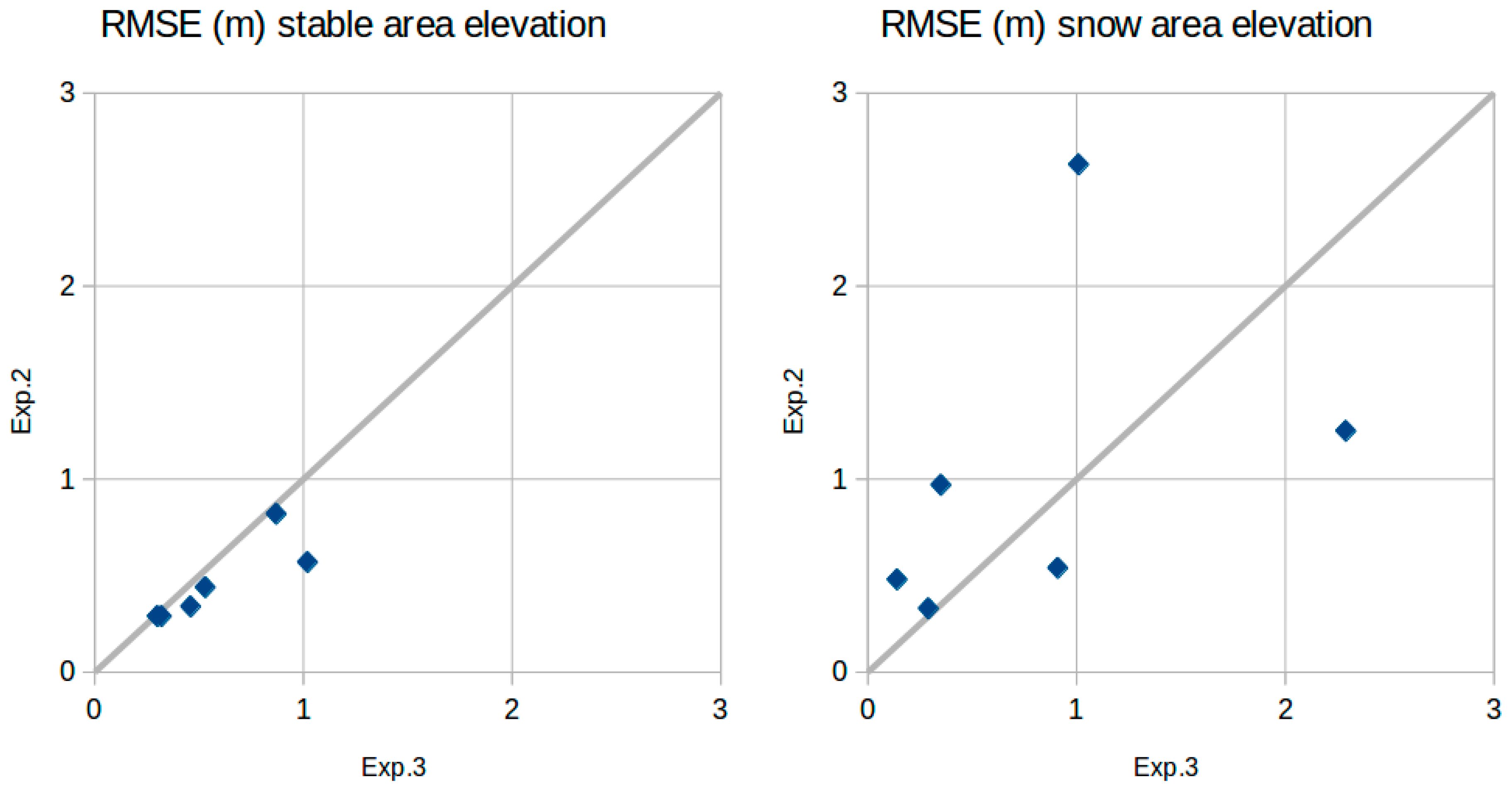
| Date | Exp. | Min (m) | Max (m) | Mean (m) | Std (m) | RMSE (m) | Stable Area RMSE (m) |
|---|---|---|---|---|---|---|---|
| 8-May-2015 | 1 | N/A | N/A | N/A | N/A | N/A | N/A |
| 2 | −6.78 | 0.09 | −2.23 | 1.40 | 2.63 | 0.57 | |
| 3 | −3.32 | 0.53 | −0.79 | 0.63 | 1.01 | 1.02 | |
| 20-May-2015 | 1 | −0.21 | 3.39 | 1.50 | 0.81 | 1.70 | |
| 2 | −3.10 | 3.35 | 0.66 | 1.06 | 1.25 | 0.82 | |
| 3 | −0.06 | 4.45 | 2.05 | 1.03 | 2.29 | 0.87 | |
| 4-Jun-2015 | 1 | −0.57 | 0.81 | 0.17 | 0.20 | 0.26 | |
| 2 | −1.86 | 0.32 | −0.35 | 0.41 | 0.54 | 0.44 | |
| 3 | −3.12 | 0.11 | −0.73 | 0.54 | 0.91 | 0.53 | |
| 18-June-2015 | 1 | −0.46 | 1.44 | 0.28 | 0.27 | 0.39 | |
| 2 | −0.54 | 2.2 | 0.74 | 0.63 | 0.97 | 0.34 | |
| 3 | −0.94 | 1.00 | 0.17 | 0.31 | 0.35 | 0.46 | |
| 29-June-2015 | 1 | −0.03 | 0.77 | 0.30 | 0.12 | 0.32 | |
| 2 | −0.10 | 0.91 | 0.43 | 0.21 | 0.48 | 0.29 | |
| 3 | −0.48 | 0.33 | 0.02 | 0.14 | 0.14 | 0.30 | |
| 4-July-2015 | 1 | −0.18 | 0.33 | 0.03 | 0.08 | 0.09 | |
| 2 | −0.22 | 0.68 | 0.27 | 0.19 | 0.33 | 0.29 | |
| 3 | −0.96 | 0.27 | −0.15 | 0.25 | 0.29 | 0.32 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chakra, C.A.; Gascoin, S.; Somma, J.; Fanise, P.; Drapeau, L. Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon using Time Lapse Photogrammetry. Sensors 2019, 19, 3890. https://doi.org/10.3390/s19183890
Chakra CA, Gascoin S, Somma J, Fanise P, Drapeau L. Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon using Time Lapse Photogrammetry. Sensors. 2019; 19(18):3890. https://doi.org/10.3390/s19183890
Chicago/Turabian StyleChakra, Charbel Abou, Simon Gascoin, Janine Somma, Pascal Fanise, and Laurent Drapeau. 2019. "Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon using Time Lapse Photogrammetry" Sensors 19, no. 18: 3890. https://doi.org/10.3390/s19183890
APA StyleChakra, C. A., Gascoin, S., Somma, J., Fanise, P., & Drapeau, L. (2019). Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon using Time Lapse Photogrammetry. Sensors, 19(18), 3890. https://doi.org/10.3390/s19183890