A Wi-Fi-Based Wireless Indoor Position Sensing System with Multipath Interference Mitigation


Abstract
:1. Introduction
- The mechanism of the position sensing accuracy loss due to the multipath interference effect is analyzed theoretically, and the multipath strength indicator is defined to measure the interference quantitatively.
- A novel RSSI-assisted TDoA method is proposed to mitigate the impact of the multipath interference. Especially, the proposed method is capable of handling the circumstances with small propagation delay difference.
- The prototype of an RSSI-assisted TDoA position sensing (RTPS) system has been implemented in a software defined radio (SDR) platform. The prototype system shows advantages of high accuracy, high robustness, and low computational complexity compared to other methods in the literature.
2. RSSI-Assisted TDoA Method with Multipath Interference Mitigation
2.1. Conventional TDoA Method for Position Sensing
2.2. Proposed RSSI-Assisted TDoA Method
- If , it is surmised that both and are negative, and the compensation signal and will be found and added to and , respectively.
- If , it is surmised that either or is negative, and the compensation will be applied to the one selected from or which has larger .
- If and there is large difference between and (specifically two conditions: i. the polarity of is different from that of ; ii. and have the same polarities, but / is less than a threshold, i.e., 0.1), the compensation will be applied to the one selected from or which has larger .
- No compensation will be applied for all the other conditions.
3. Prototype System for Method Validation
3.1. Prototype System Hardware and Firmware
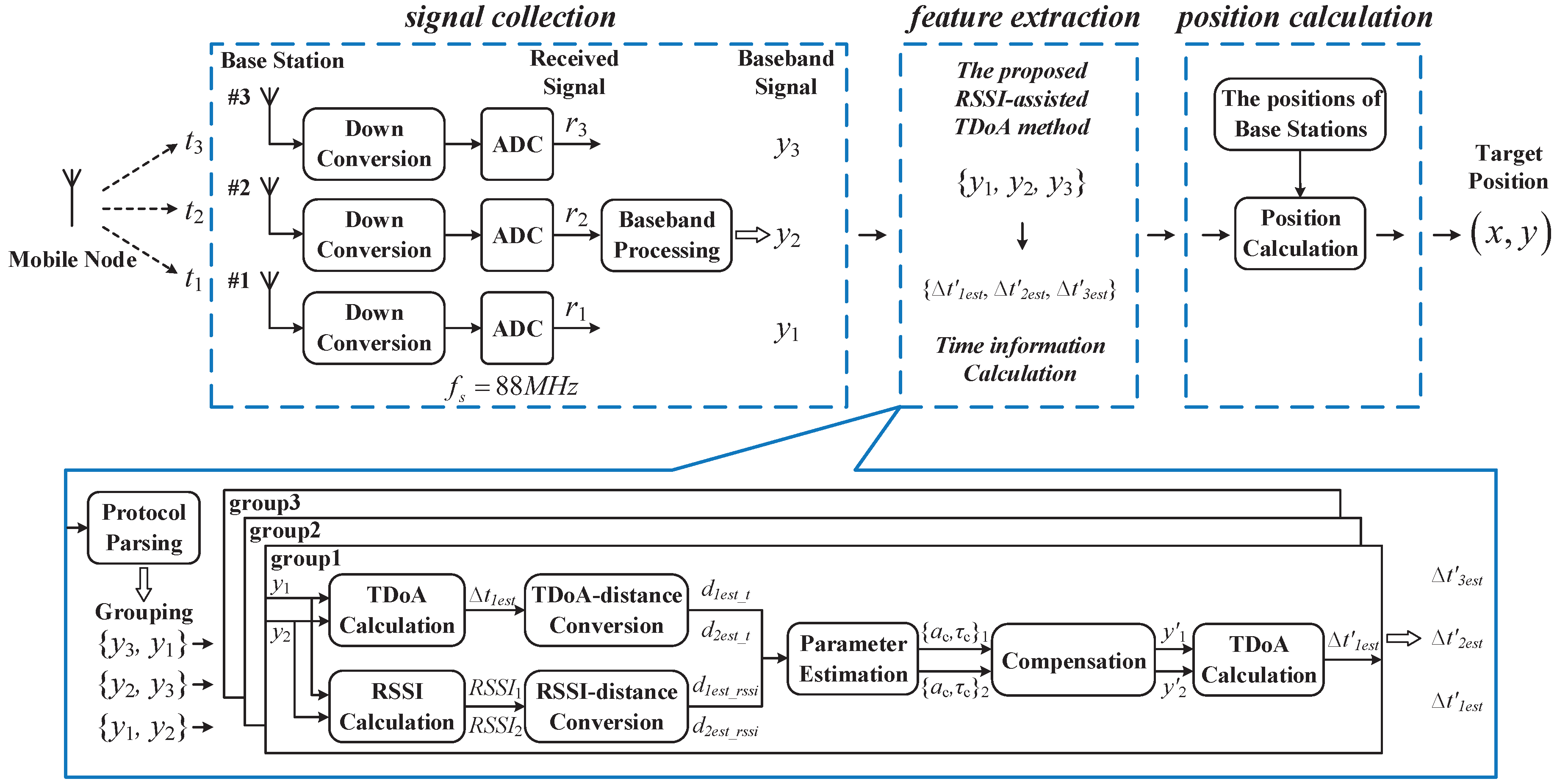
3.2. Signal Processing Flow for Position Sensing
4. Simulation and Experimental Results
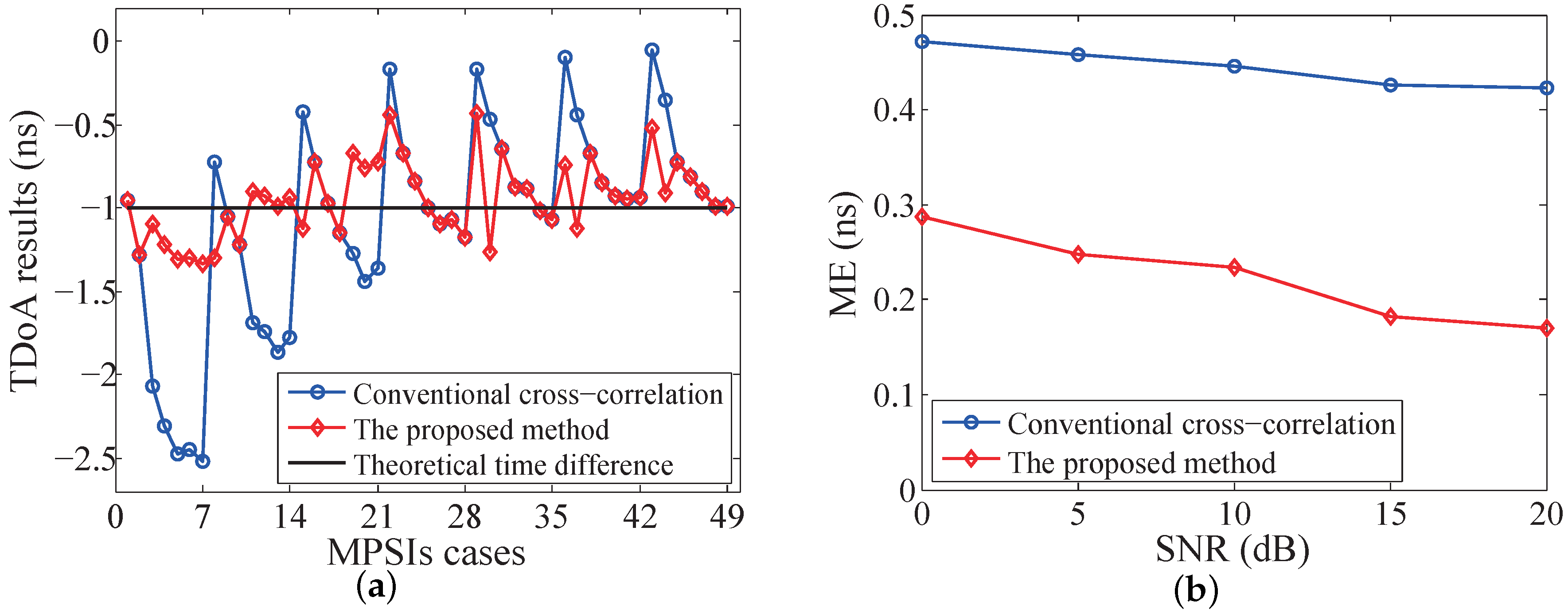
4.1. Simulation Results
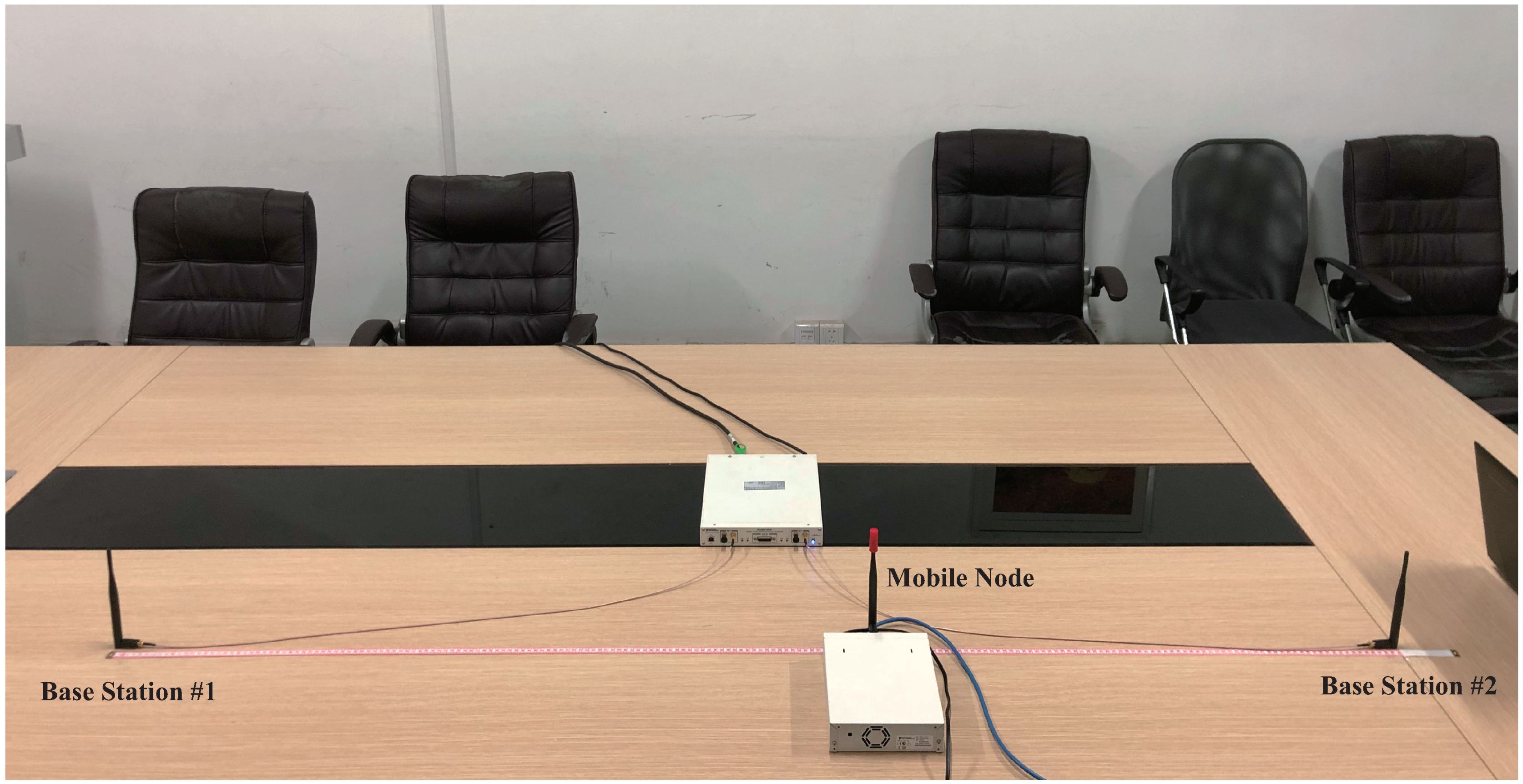
4.2. 1D Position Sensing Experiment
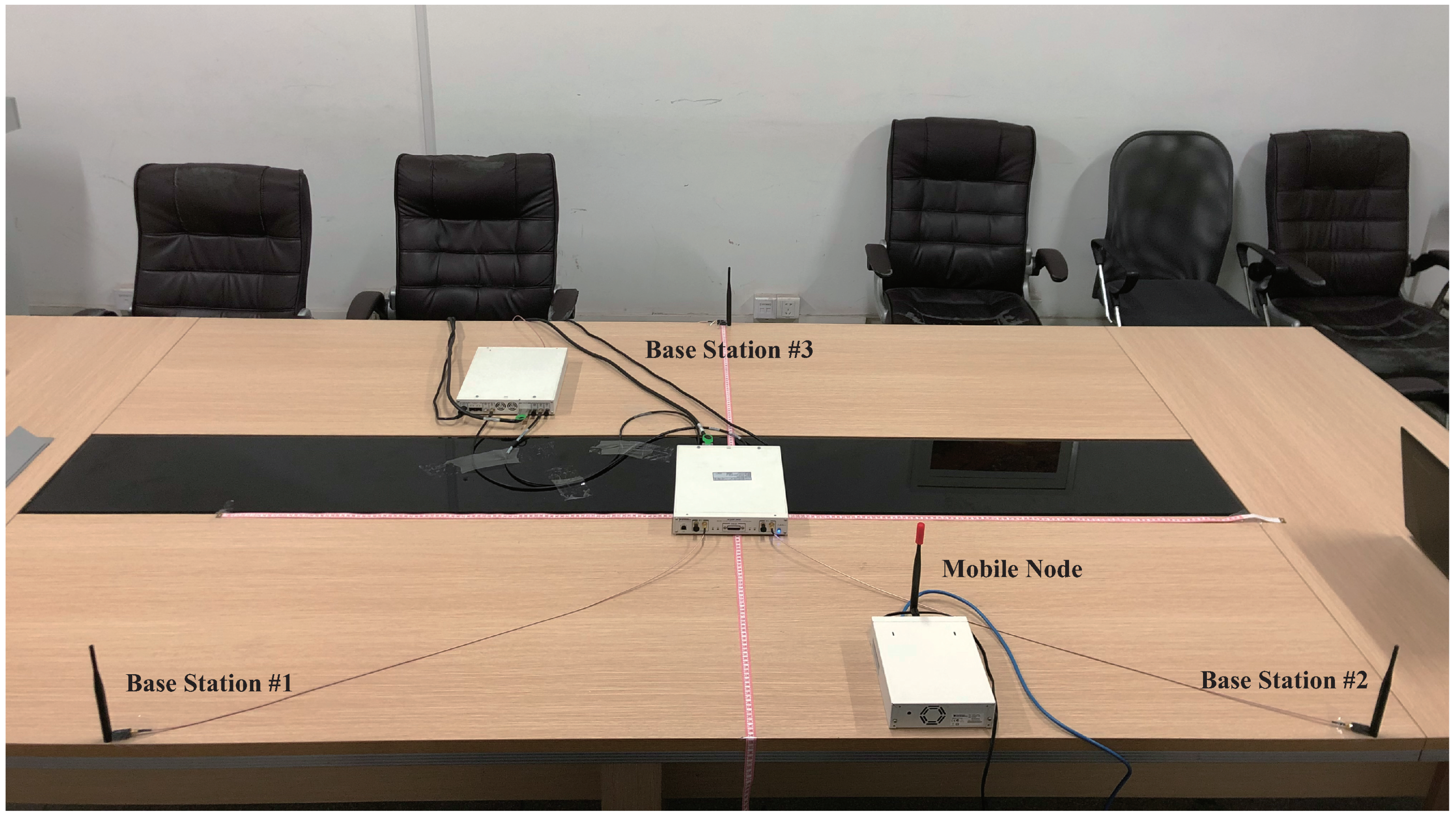
4.3. 2D Position Sensing Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Buchli, B.; Sutton, F.; Beutel, J. GPS-equipped wireless sensor network node for high-accuracy positioning applications. In Proceedings of the European Conference on Wireless Sensor Networks, Trento, Italy, 15–17 February 2012; pp. 179–195. [Google Scholar]
- Aman, M.S.; Quint, C.D.; Abdelgawad, A.; Yelamarthi, K. Sensing and classifying indoor environments: An Iot based portable tour guide system. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutorials 2018, 20, 3607–3644. [Google Scholar] [CrossRef]
- Lopes, B.; Pereira, R.L. ShopAssist—A unified location-aware system for shopping. In Proceedings of the 2016 Global Information Infrastructure and Networking Symposium (GIIS), Porto, Portugal, 19–21 October 2016; pp. 1–6. [Google Scholar]
- Tang, Y.; Wang, J.; Li, C. Short-range indoor localization using a hybrid Doppler-UWB System. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honololu, HI, USA, 4–9 June 2017; pp. 1011–1014. [Google Scholar]
- Moon, G.B.; Chun, S.; Hur, M.B.; Jee, G.I. A robust indoor positioning system using two-stage EKF SLAM for first responders in an emergency environment. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 707–711. [Google Scholar]
- Huang, G.; Hu, Z.; Cai, H. Wi-fi and vision integrated localization for reverse vehicle-searching in underground parking lot. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 1067–1071. [Google Scholar]
- Gupta, G.; Kejriwal, N.; Pallav, P.; Hassan, E.; Kumar, S.; Hebbalaguppe, R. Indoor Localisation and Navigation on Augmented Reality Devices. In Proceedings of the 2016 IEEE International Symposium on Mixed and Augmented Reality (ISMAR-Adjunct), Merida, Mexico, 19–23 September 2016; pp. 107–112. [Google Scholar]
- Zhang, Z.; Gao, X.; Biswas, J.; Wu, J.K. Moving targets detection and localization in passive infrared sensor networks. In Proceedings of the 2007 10th International Conference on Information Fusion, Quebec, QC, Canada, 9–12 July 2007; pp. 1–6. [Google Scholar]
- Runge, A.; Baunach, M.; Kolla, R. Precise self-calibration of ultrasound based indoor localization systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar]
- Wang, Y.; Ye, Q.; Cheng, J.; Wang, L. RSSI-based bluetooth indoor localization. In Proceedings of the 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 16–18 December 2015; pp. 165–171. [Google Scholar]
- Boontrai, D.; Jingwangsa, T.; Cherntanomwong, P. Indoor localization technique using passive RFID tags. In Proceedings of the 2009 9th International Symposium on Communications and Information Technology, Icheon, Korea, 28–30 September 2009; pp. 922–926. [Google Scholar]
- Zhang, S.; Han, R.; Huang, W.; Wang, S.; Hao, Q. Linear Bayesian Filter Based Low-Cost UWB Systems for Indoor Mobile Robot Localization. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutorials 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; pp. 205–218. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Wu, C.L.; Fu, L.C.; Lian, F.L. WLAN location determination in e-home via support vector classification. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, 21–23 March 2004; Volume 2, pp. 1026–1031. [Google Scholar]
- Guo, X.; Ansari, N.; Li, L.; Li, H. Indoor localization by fusing a group of fingerprints based on random forests. IEEE Internet Things J. 2018, 5, 4686–4698. [Google Scholar] [CrossRef]
- Madigan, D.; Einahrawy, E.; Martin, R.P.; Ju, W.H.; Krishnan, P.; Krishnakumar, A. Bayesian indoor positioning systems. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; Volume 2, pp. 1217–1227. [Google Scholar]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Vehicular Technology. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Soro, B.; Lee, C. Performance Comparison of Indoor Fingerprinting Techniques Based on Artificial Neural Network. In Proceedings of the TENCON 2018—2018 IEEE Region 10 Conference, Jeju, Korea, 28–31 October 2018; pp. 0056–0061. [Google Scholar]
- Le, D.V.; Meratnia, N.; Havinga, P.J. Unsupervised Deep Feature Learning to Reduce the Collection of Fingerprints for Indoor Localization Using Deep Belief Networks. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–7. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. DeepFi: Deep learning for indoor fingerprinting using channel state information. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1666–1671. [Google Scholar]
- Cai, X.; Li, X.; Yuan, R.; Hei, Y. Identification and mitigation of NLOS based on channel state information for indoor WiFi localization. In Proceedings of the 2015 International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S. CSI phase fingerprinting for indoor localization with a deep learning approach. IEEE Internet Things J. 2016, 3, 1113–1123. [Google Scholar] [CrossRef]
- Bisio, I.; Lavagetto, F.; Marchese, M.; Sciarrone, A. Energy efficient WiFi-based fingerprinting for indoor positioning with smartphones. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 4639–4643. [Google Scholar]
- Bisio, I.; Lavagetto, F.; Marchese, M.; Sciarrone, A. Smart probabilistic fingerprinting for WiFi-based indoor positioning with mobile devices. Pervasive Mob. Comput. 2016, 31, 107–123. [Google Scholar] [CrossRef]
- Nur, K.; Feng, S.; Ling, C.; Ochieng, W. Application of the improved FOCUSS for arrival time estimation (IFATE) algorithm to WLAN high accuracy positioning services. In Proceedings of the 2012 Ubiquitous Positioning, Indoor Navigation, and Location Based Service (UPINLBS), Helsinki, Finland, 3–4 October 2012; pp. 1–8. [Google Scholar]
- Makki, A.; Siddig, A.; Saad, M.M.; Bleakley, C.; Cavallaro, J. High-resolution time of arrival estimation for OFDM-based transceivers. Electron. Lett. 2015, 51, 294–296. [Google Scholar] [CrossRef]
- Fang, B.T. Simple solutions for hyperbolic and related position fixes. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 748–753. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Foy, W.H. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, 187–194. [Google Scholar] [CrossRef]
- König, S.; Schmidt, M.; Hoene, C. Precise time of flight measurements in IEEE 802.11 networks by cross-correlating the sampled signal with a continuous Barker code. In Proceedings of the 7th IEEE International Conference on Mobile Ad-hoc and Sensor Systems (IEEE MASS 2010), San Francisco, CA, USA, 8–12 November 2010; pp. 642–649. [Google Scholar]
- Exel, R.; Gaderer, G.; Loschmidt, P. Localisation of wireless LAN nodes using accurate TDoA measurements. In Proceedings of the 2010 IEEE Wireless Communication and Networking Conference, Sydney, NSW, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar]
- Saarnisaari, H. TLS-ESPRIT in a time delay estimation. In Proceedings of the 1997 IEEE 47th Vehicular Technology Conference, Technology in Motion, Phoenix, AZ, USA, 4–7 May 1997; Volume 3, pp. 1619–1623. [Google Scholar]
- Dumont, L.; Fattouche, M.; Morrison, G. Super-resolution of multipath channels in a spread spectrum location system. Electron. Lett. 1994, 30, 1583–1584. [Google Scholar] [CrossRef]
- Keunecke, K.; Scholl, G. IEEE 802.11 n-based TDOA performance evaluation in an indoor multipath environment. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), Hague, The Netherlands, 6–11 April 2014; pp. 2131–2135. [Google Scholar]
- Gaber, A.; Omar, A. Sub-nanosecond accuracy of TDOA estimation using Matrix Pencil algorithms and IEEE 802.11. In Proceedings of the 2012 International Symposium on Wireless Communication Systems (ISWCS), Paris, France, 28–31 August 2012; pp. 646–650. [Google Scholar]
- IEEE Standard for Information Technology–Telecommunications and Information Exchange Between Systems–Local and Metropolitan Networks–Specific Requirements–Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications: Higher Speed Physical Layer (PHY) Extension in the 2.4 GHz Band; IEEE: New York, NY, USA, 2000; Std 802.11b-1999.
- Su, C.; Liu, Y.; Liu, L.; Yang, M.; Zhao, H.; Yin, X. Experimental Evaluation of Multipath Mitigation in TDOA-Based Indoor Passive Localization System Using A Beam Steering Broadband Circular Polarization Antenna. Electronics 2018, 7, 362. [Google Scholar] [CrossRef]
- Jacovitti, G.; Scarano, G. Discrete time techniques for time delay estimation. IEEE Trans. Signal Process. 1993, 41, 525–533. [Google Scholar] [CrossRef]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Schmidl, T.M.; Cox, D.C. Robust frequency and timing synchronization for OFDM. IEEE Trans. Commun. 1997, 45, 1613–1621. [Google Scholar] [CrossRef] [Green Version]
- Lategahn, J.; Muller, M.; Rohrig, C. Tdoa and rss based extended kalman filter for indoor person localization. In Proceedings of the 2013 IEEE 78th Vehicular Technology Conference (VTC Fall), Las Vegas, NV, USA, 2–5 September 2013; pp. 1–5. [Google Scholar]
- Sadowski, S.; Spachos, P. Rssi-based indoor localization with the internet of things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Li, S.; Hedley, M.; Bengston, K.; Johnson, M.; Humphrey, D.; Kajan, A.; Bhaskar, N. TDOA-based passive localization of standard WiFi devices. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–5. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, T.; Jiang, H.; Zhao, X.; Zhang, C. A Wi-Fi-Based Wireless Indoor Position Sensing System with Multipath Interference Mitigation. Sensors 2019, 19, 3983. https://doi.org/10.3390/s19183983
Xie T, Jiang H, Zhao X, Zhang C. A Wi-Fi-Based Wireless Indoor Position Sensing System with Multipath Interference Mitigation. Sensors. 2019; 19(18):3983. https://doi.org/10.3390/s19183983
Chicago/Turabian StyleXie, Tuo, Hanjun Jiang, Xijin Zhao, and Chun Zhang. 2019. "A Wi-Fi-Based Wireless Indoor Position Sensing System with Multipath Interference Mitigation" Sensors 19, no. 18: 3983. https://doi.org/10.3390/s19183983