Proposal of a Geometric Calibration Method Using Sparse Recovery to Remove Linear Array Push-Broom Sensor Bias


Abstract
:1. Introduction
2. Sensor Geometric Calibration Model
2.1. Sensor Geometric Calibration Modeling
2.2. Error Modeling
3. Geometric Calibration by Using Sparse Recovery
3.1. Compressive Sensing
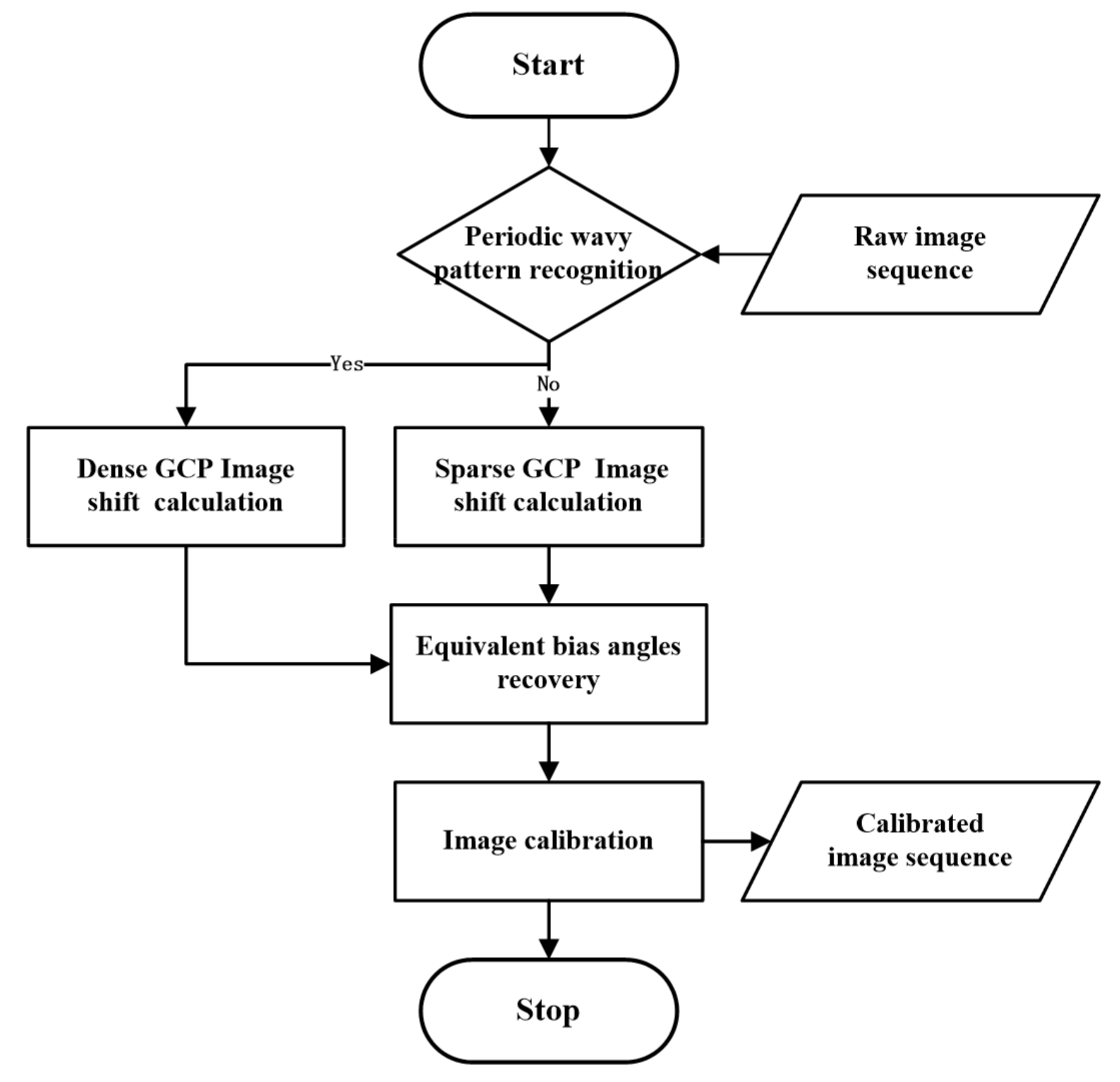
3.2. Procedure of Proposed Method
3.2.1. Periodic Wavy Pattern Recognition
3.2.2. Sparse GCP Image Shift Calculation
3.2.3. Dense GCP Image Shift Calculation
3.2.4. Equivalent Bias Angle Recovery
3.2.5. Image Calibration
3.3. Criticism of the Proposed Method
3.3.1. Measurement Matrix and Measurement Equation
- The upper limit of the equivalent bias angles , the increment in each step, and the cycle index are determined;
- The first parameter of nth equivalent bias angles is set to and the other parameters are set to zero;
- The image positions of the mth GCP by using the imaging parameters and the equivalent bias angles are calculated’
- After obtaining the image positions ,, and , the variations of image positions and are calculated using
- and are calculated as follows. The other elements of can be calculated in the same way
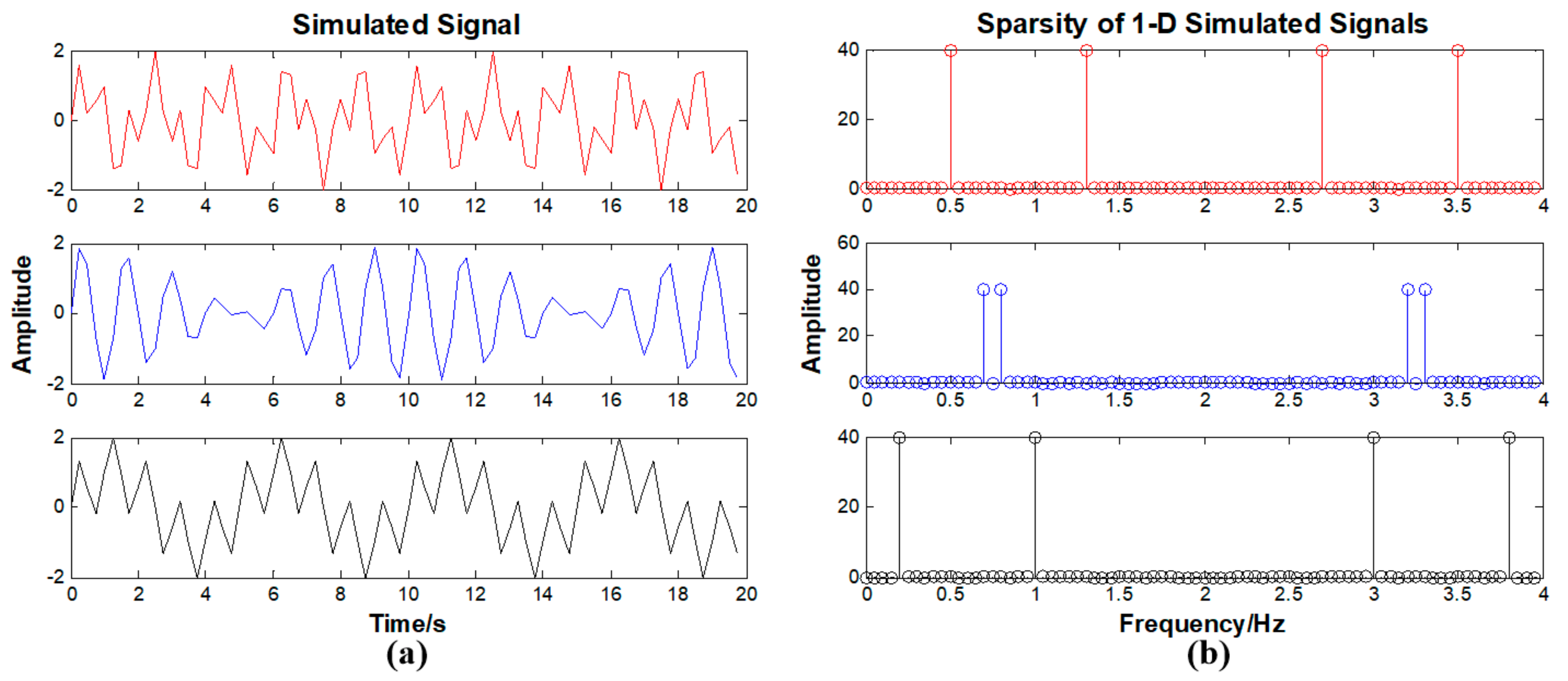
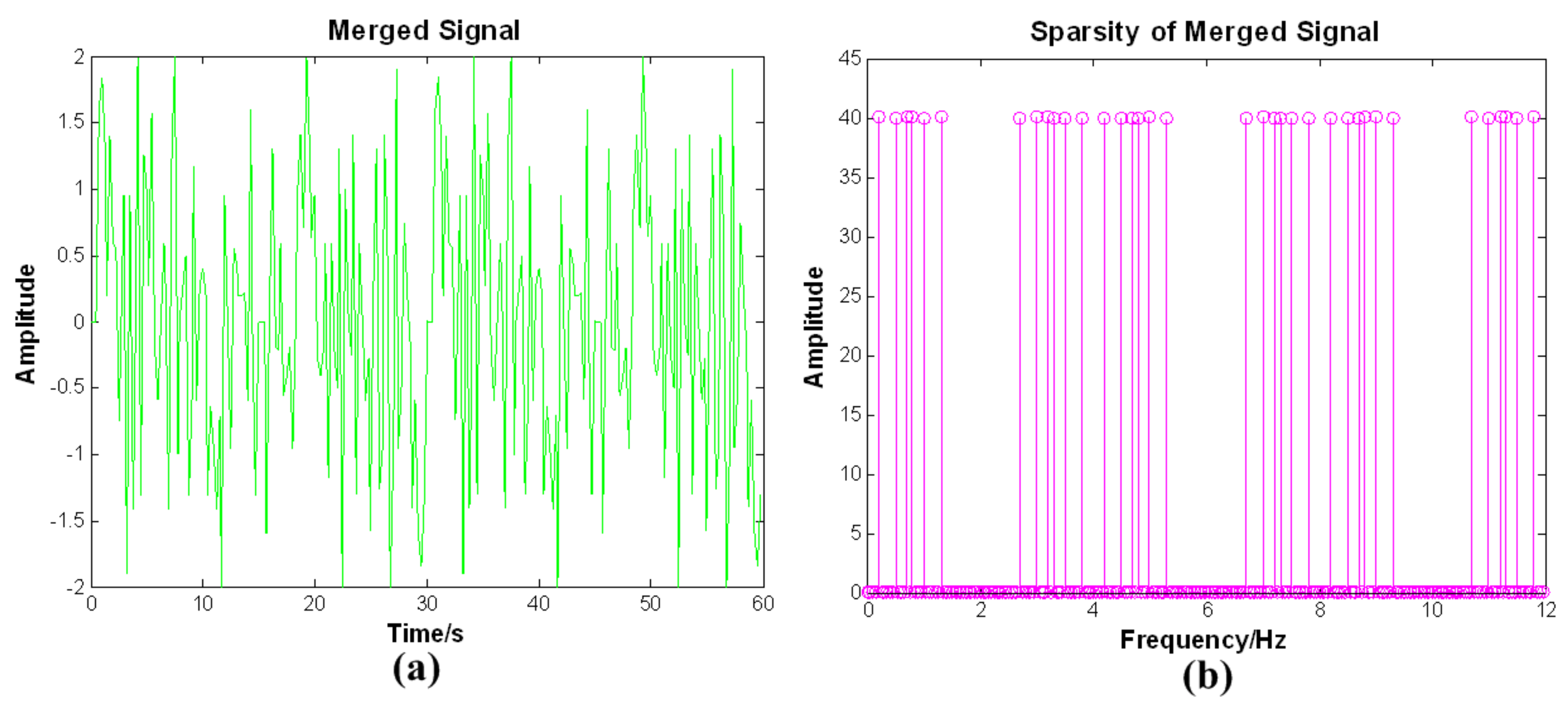
3.3.2. Sparse Basis and Sparse Representation
3.3.3. Signal Recovery
4. Experiments and Analysis
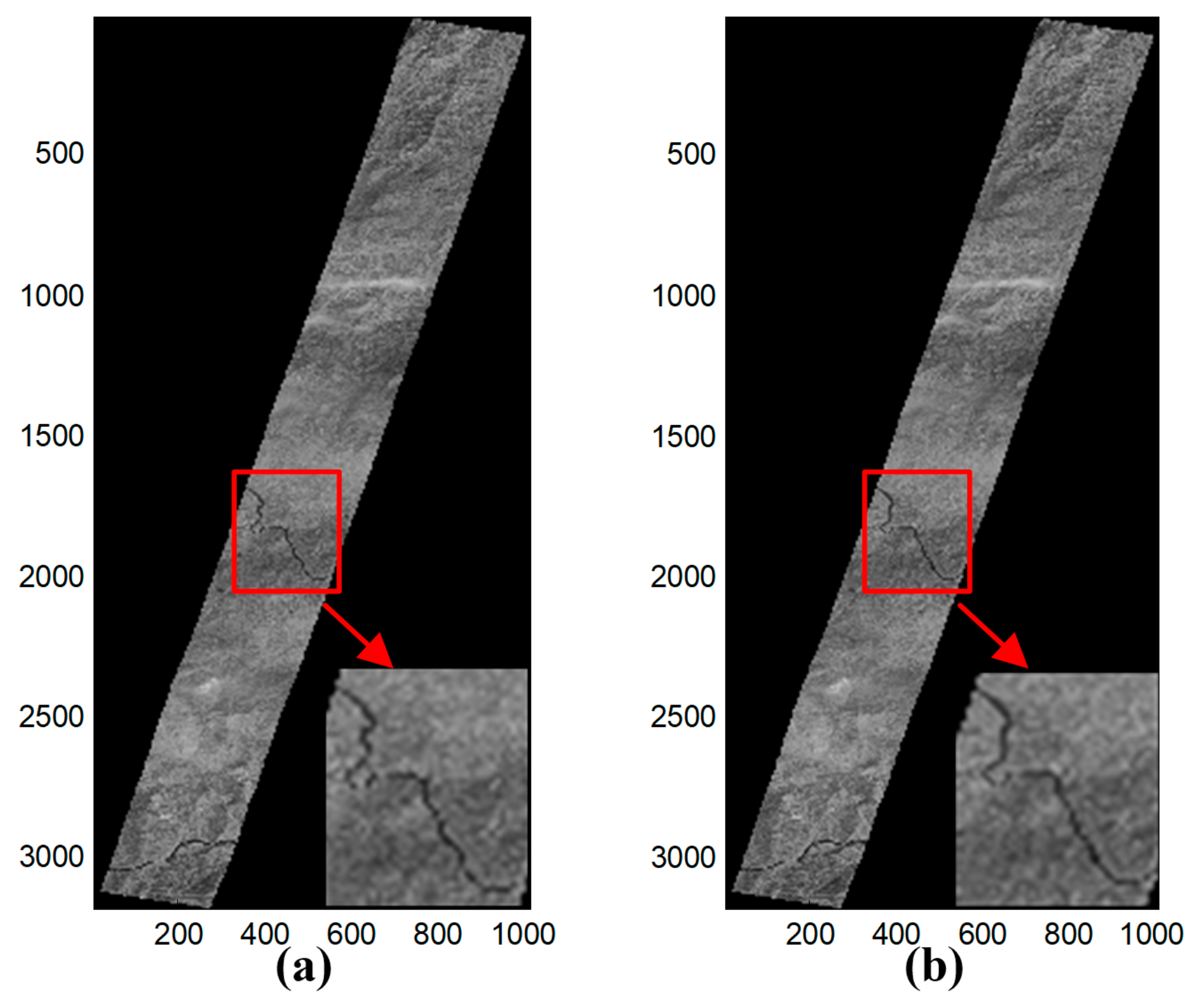
4.1. Hyperion Data Experiment
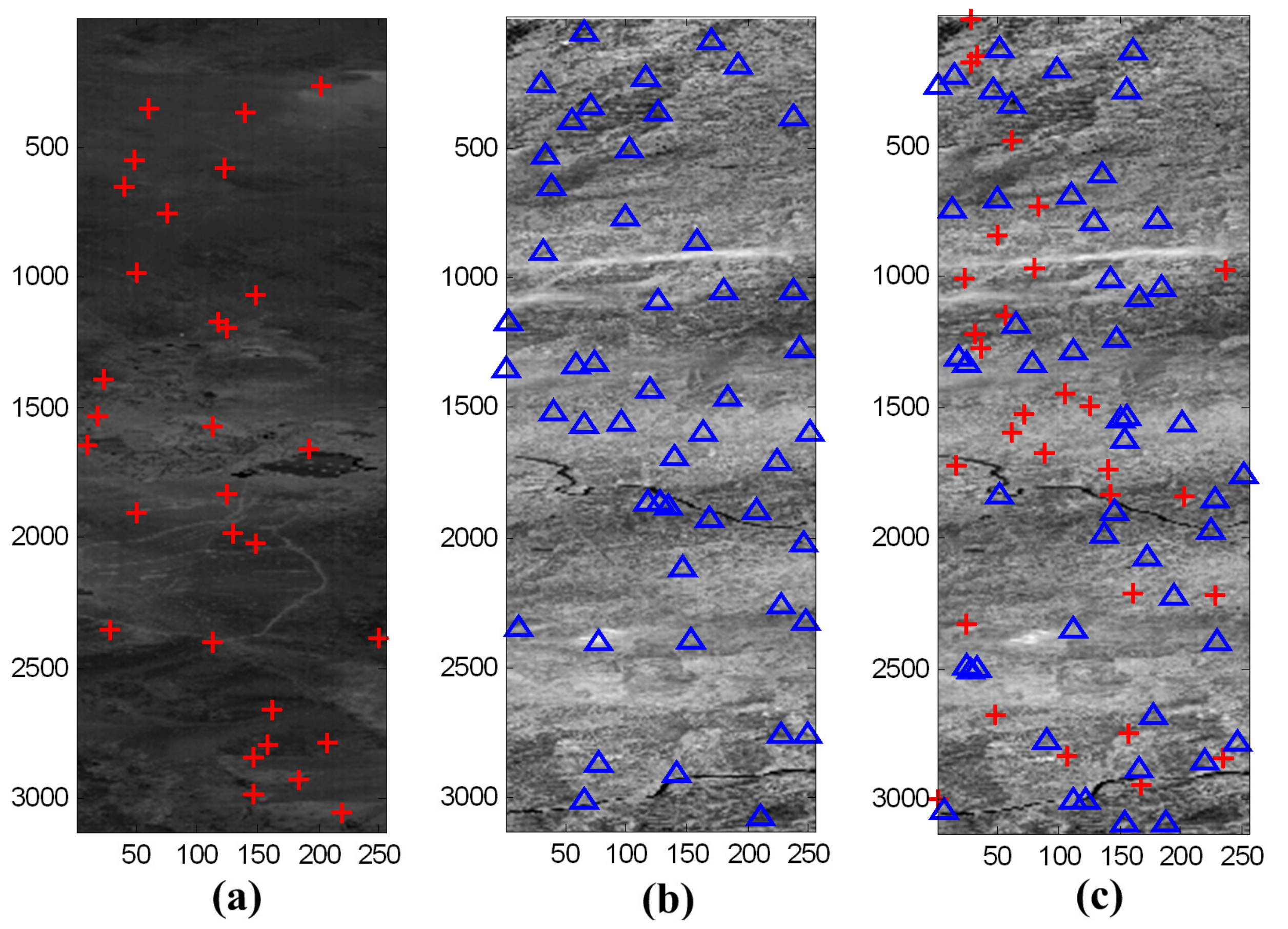
4.1.1. Data Description
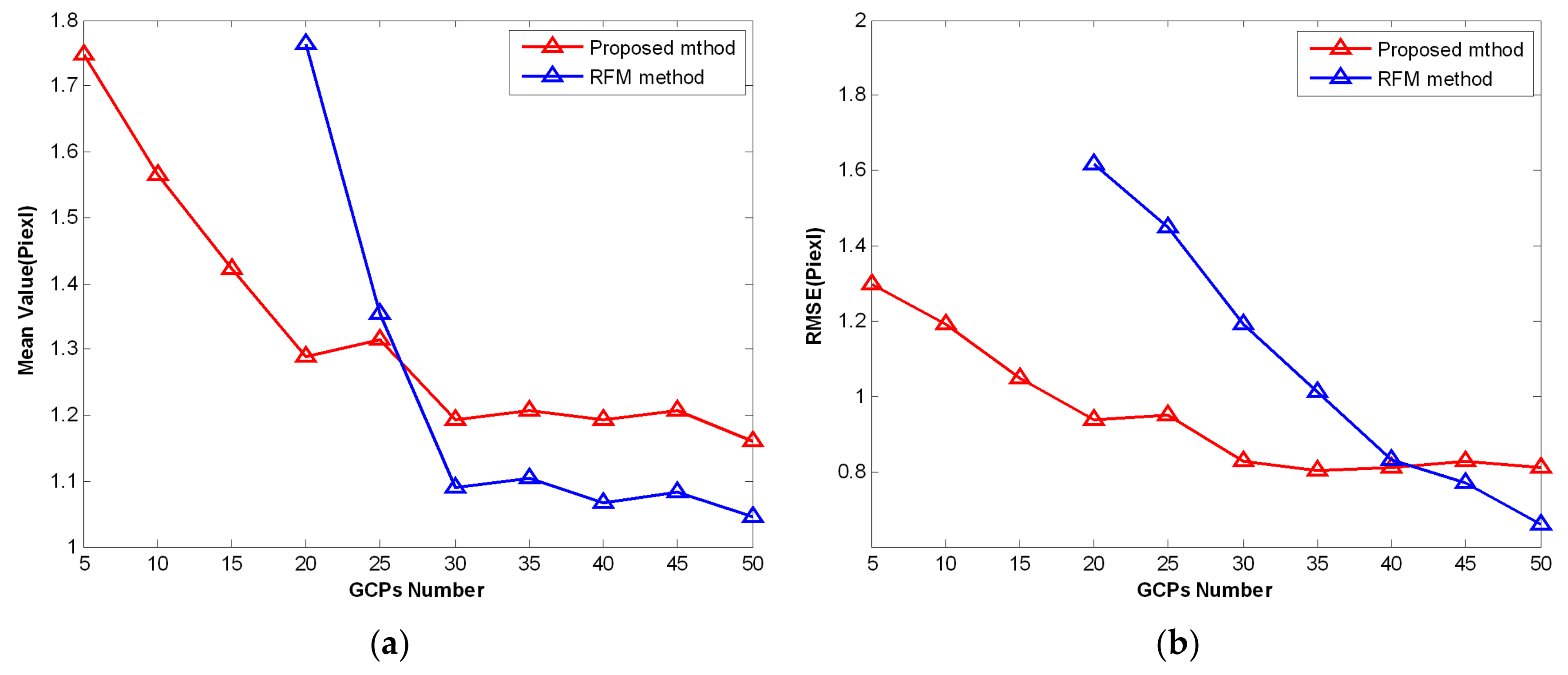
4.1.2. Experimental Results
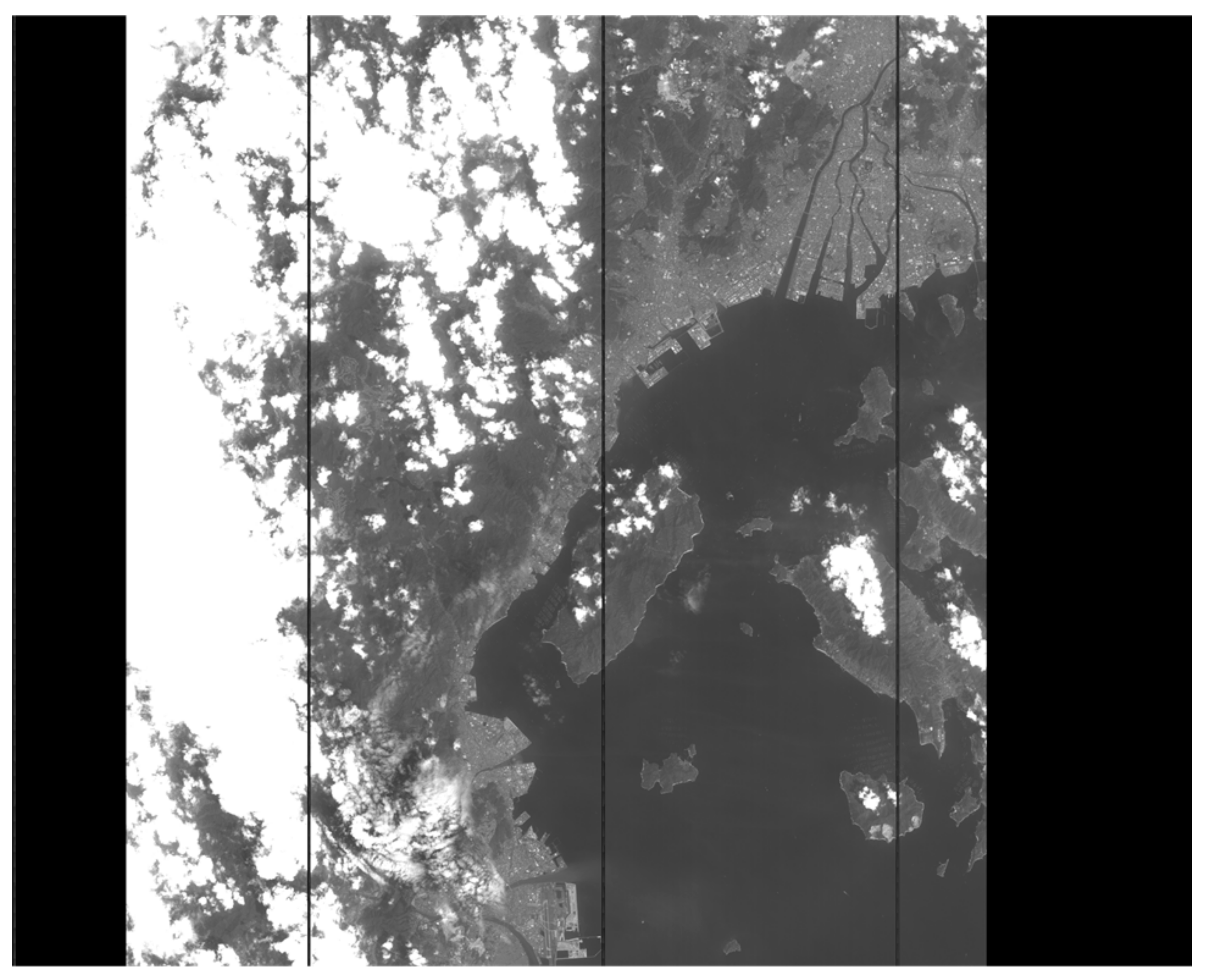
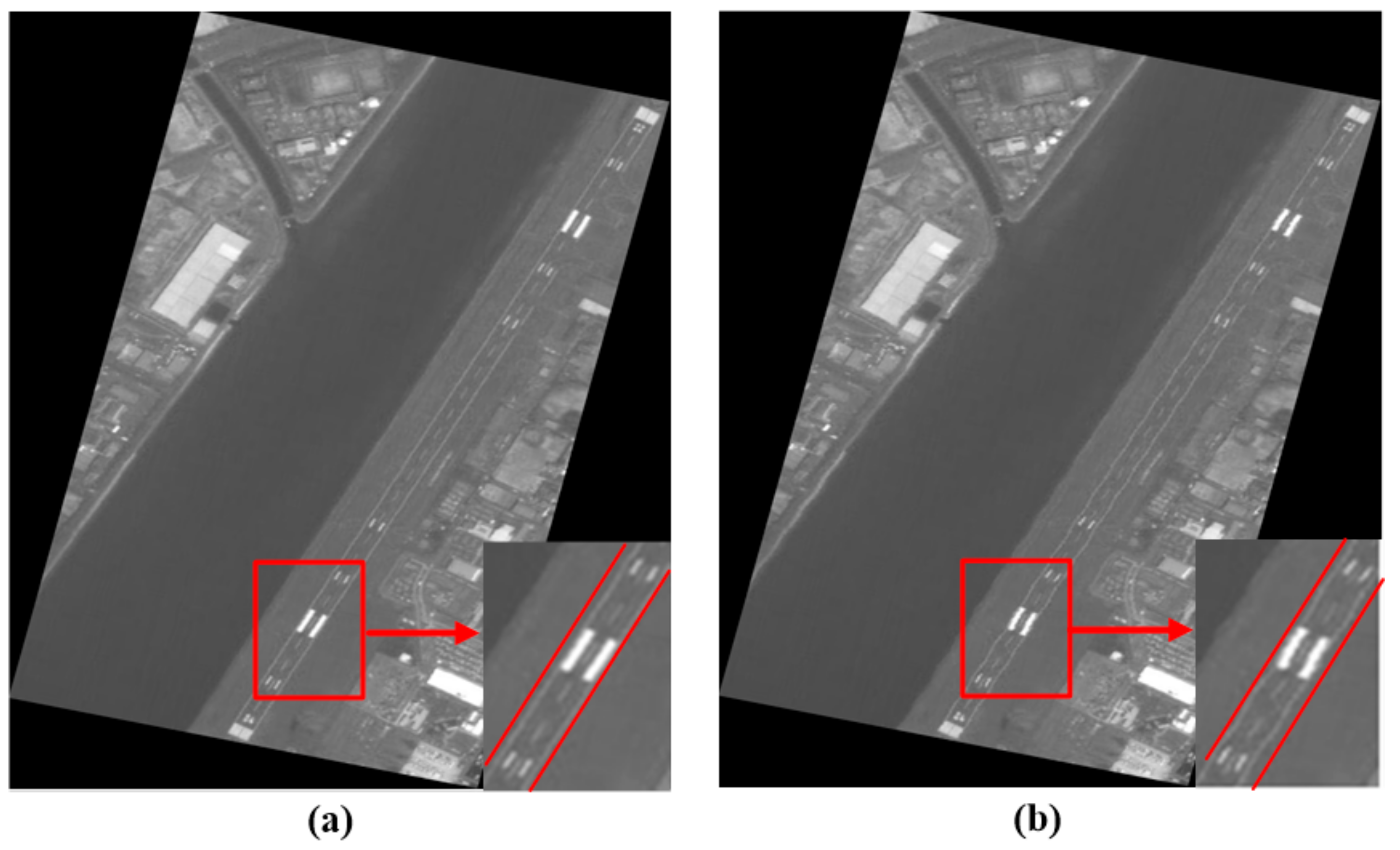
4.2. Experiment on ALOS Data
4.2.1. Data Description
4.2.2. Experimental Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Iwasaki, A.; Fujisada, H. ASTER geometric performance. IEEE Trans. Geosci. Remote. Sens. 2005, 43, 2700–2706. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T. PRISM on-orbit geometric calibration and DSM performance. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 4060–4073. [Google Scholar] [CrossRef]
- Clemons, T.M.; Chang, K.C. Sensor calibration using in-situ celestial observations to estimate bias in space-based missile tracking. IEEE Trans. AES 2012, 48, 1403–1427. [Google Scholar] [CrossRef]
- Xue, Y.H.; An, W. A novel target LOS calibration method for IR scanning sensor based on control points. In Proceedings of the SPIE, Beijing, China, 5 December 2012; pp. 314–318. [Google Scholar]
- Sun, J.B.; Ni, L.; Zhou, J.Q. Principle and Applications of Remote Sensing; Wuhan University Press: Wuhan, China, 2009; pp. 123–137. [Google Scholar]
- Poli, D.; Toutin, T. Review of developments in geometric modeling for high resolution satellite pushbroom sensors. Photogramm. Rec. 2012, 27, 58–73. [Google Scholar] [CrossRef]
- Chen, Y.F.; Xie, Z.; Qiu, Z.; Zhang, Q.; Hu, Z. Calibration and validation of ZY-3 optical sensors. IEEE Trans. Geosci. Remote. Sens. 2015, 53, 4616–4626. [Google Scholar] [CrossRef]
- Wang, P.; An, W.; Deng, X.P.; Ma, C. Geometric correction method to correct influence of attitude jitter on remote sensing imagery using compressive sampling. J. Appl. Remote Sens. 2015, 9, 095077. [Google Scholar] [CrossRef]
- Tong, X.H.; Xu, Y.S.; Ye, Z.; Liu, S.J.; Tang, X.M.; Li, L.Y.; Xie, H.; Xie, J.F. Attitude oscillation detection of the ZY-3 satellite by using multispectral parallax images. IEEE Trans. Geosci. Remote. Sens. 2015, 53, 3522–3534. [Google Scholar] [CrossRef]
- Chen, J.; An, W.; Yang, J.G.; Wang, P. Geometric correction method for linear array pushroom infrared imagery using compressive sampling. J. Appl. Remote Sens. 2016, 10, 042010. [Google Scholar] [CrossRef]
- Jiang, Y.H.; Zhang, G.; Tang, X.M.; Li, D.R.; Huang, W.C.; Pan, H.B. Geometric calibration and accuracy assessment of ZiYuan-3 multispectral images. IEEE Trans. Geosci. Remote. Sens. 2014, 52, 4161–4172. [Google Scholar] [CrossRef]
- Kistosturian, H.G. On-orbit calibration of satellite antenna-pointing errors. IEEE Trans. AES. 1990, 26, 88–1121. [Google Scholar] [CrossRef]
- Candès, E.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal. Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Donoho, D.; Huo, X. Uncertainty principle and ideal atomic decomposition. IEEE Trans. Inf. Theory. 2001, 47, 2845–2862. [Google Scholar] [CrossRef]
- Jensen, R.R.; Jackson, M.W.; Lulla, V. Single line correction method to remove aircraft roll errors in hyperspectral imagery. J. Appl. Remote Sens. 2008, 2, 023529. [Google Scholar] [CrossRef]
- Eppler, W.G.; Paglieroni, D.W. GOES landmark positioning system. In Proceedings of the SPIE, Denver, CO, USA, 18 October 1996; pp. 789–804. [Google Scholar]
- Rudelson, M.; Vershynin, R. Sparse reconstruction by convex relaxation: Fourier and Gaussian measurements. In Proceedings of the Conference on Information Sciences & Systems, Princeton, NJ, USA, 22–24 March 2006; pp. 207–212. [Google Scholar]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Ling, Q.; Guo, Y.L.; Ling, Z.P.; An, W. A constrained sparse representation model for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote. Sens. 2019, 57, 2358–2371. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Value (urad) | RMSE (Pixels) | |
| Proposed Method | 0.43 | 0.68 |
| RFM Method | 1.67 | 2.03 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Sha, Z.; Yang, J.; An, W. Proposal of a Geometric Calibration Method Using Sparse Recovery to Remove Linear Array Push-Broom Sensor Bias. Sensors 2019, 19, 4003. https://doi.org/10.3390/s19184003
Chen J, Sha Z, Yang J, An W. Proposal of a Geometric Calibration Method Using Sparse Recovery to Remove Linear Array Push-Broom Sensor Bias. Sensors. 2019; 19(18):4003. https://doi.org/10.3390/s19184003
Chicago/Turabian StyleChen, Jun, Zhichao Sha, Jungang Yang, and Wei An. 2019. "Proposal of a Geometric Calibration Method Using Sparse Recovery to Remove Linear Array Push-Broom Sensor Bias" Sensors 19, no. 18: 4003. https://doi.org/10.3390/s19184003
APA StyleChen, J., Sha, Z., Yang, J., & An, W. (2019). Proposal of a Geometric Calibration Method Using Sparse Recovery to Remove Linear Array Push-Broom Sensor Bias. Sensors, 19(18), 4003. https://doi.org/10.3390/s19184003