A High-Precision Method for Dynamically Measuring Train Wheel Diameter Using Three Laser Displacement Transducers



Abstract
:1. Introduction
2. Measurement Method
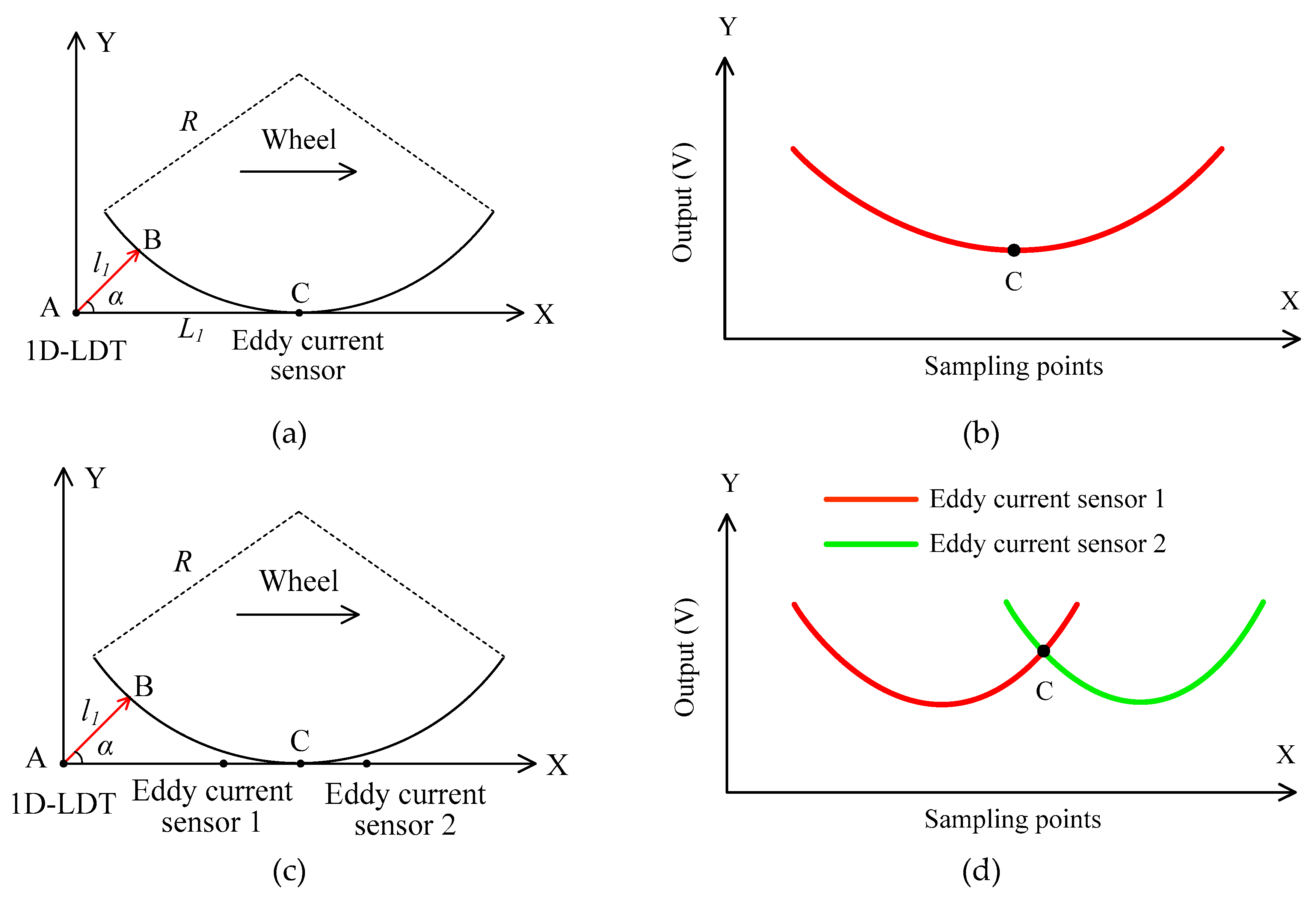
2.1. Measurement Method Based on One 1D-LDT
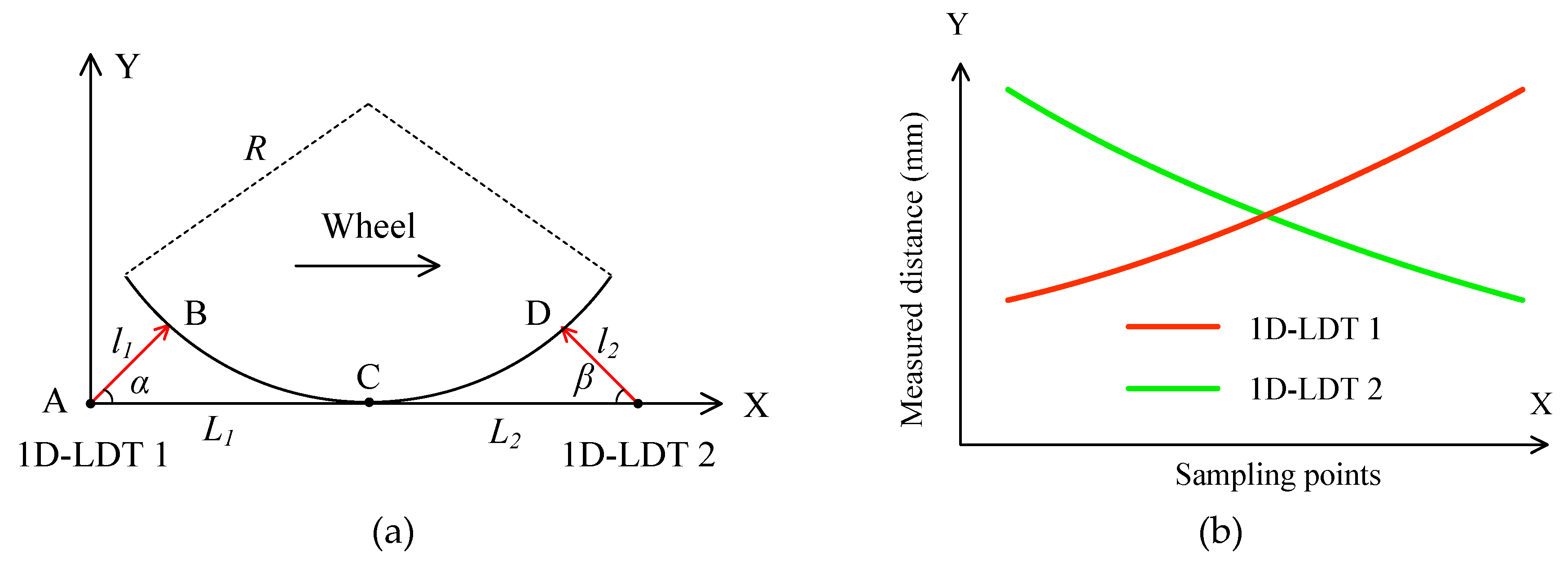
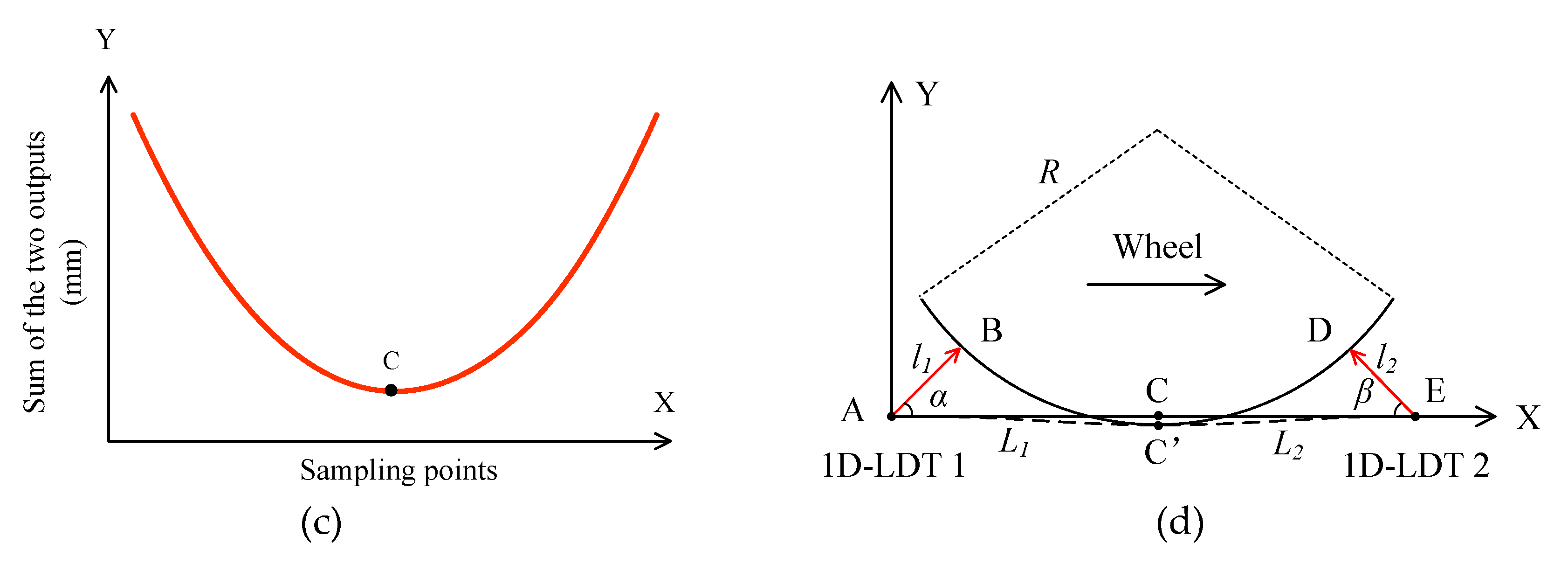
2.2. Measurement Method Based on Two 1D-LDTs
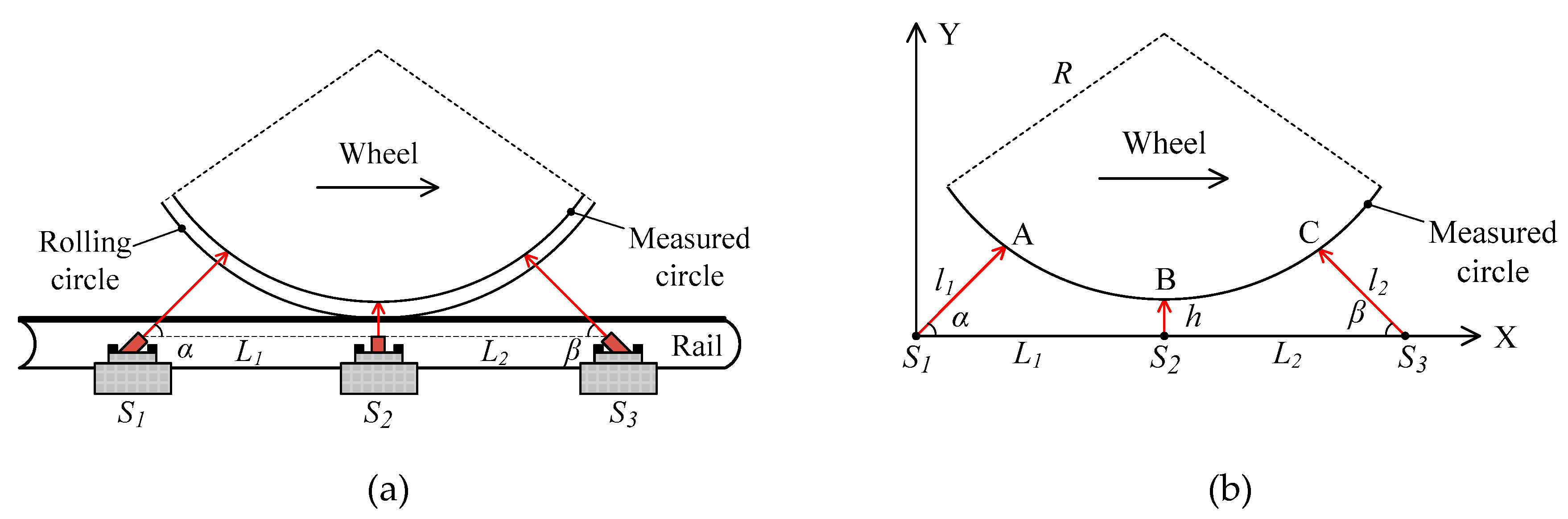
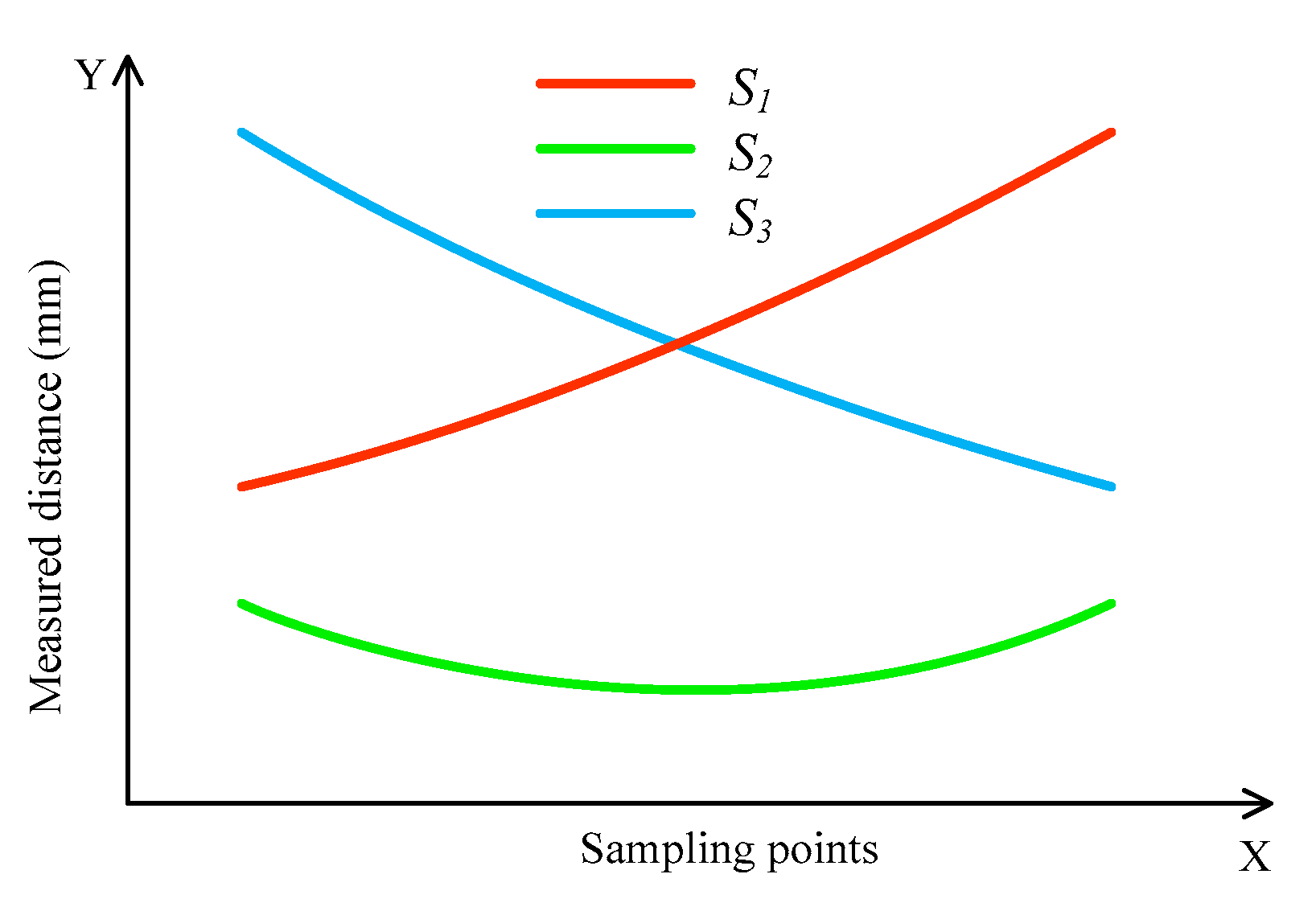
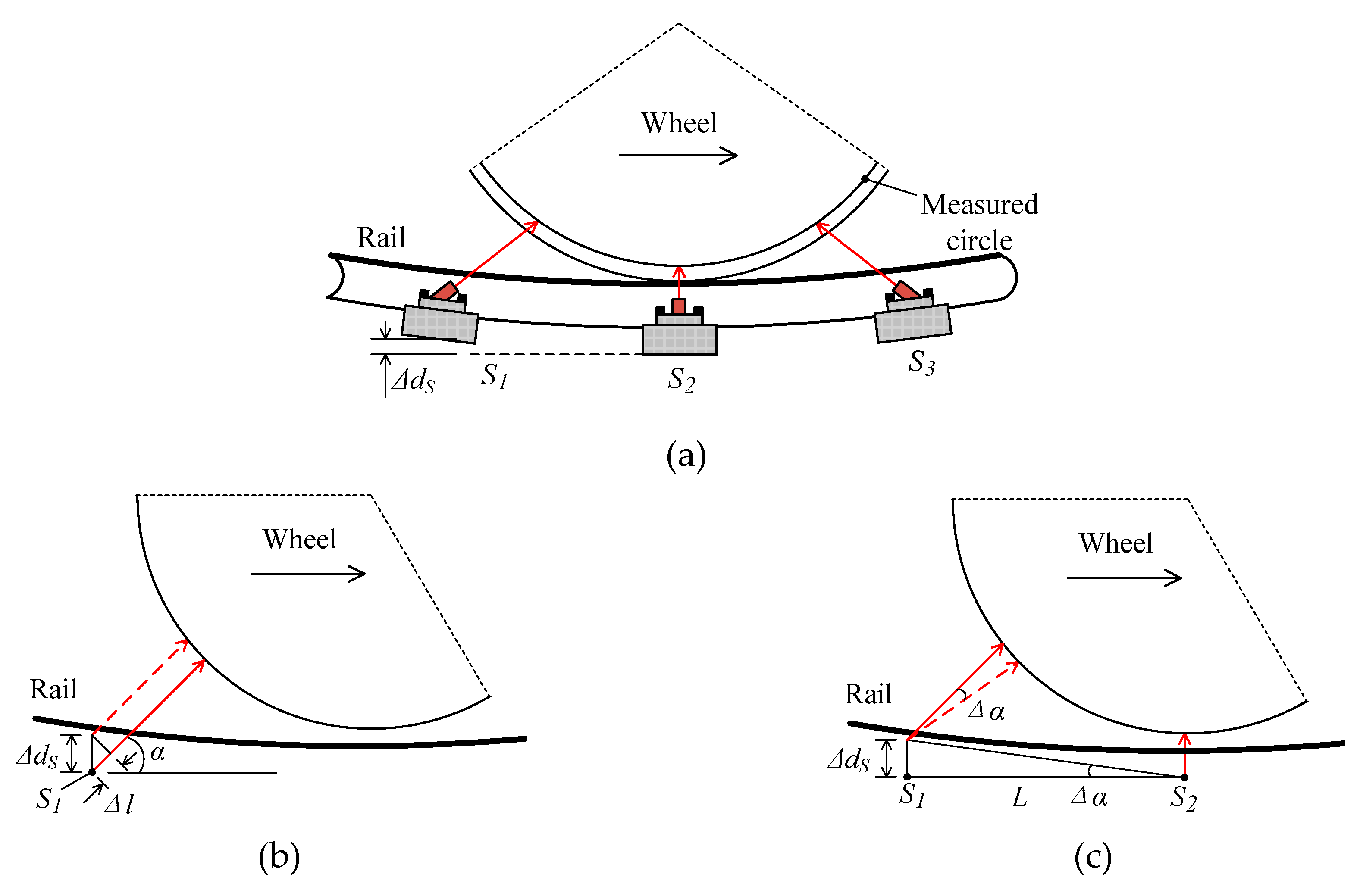
2.3. Measurement Method Based on Three 1D-LDTs
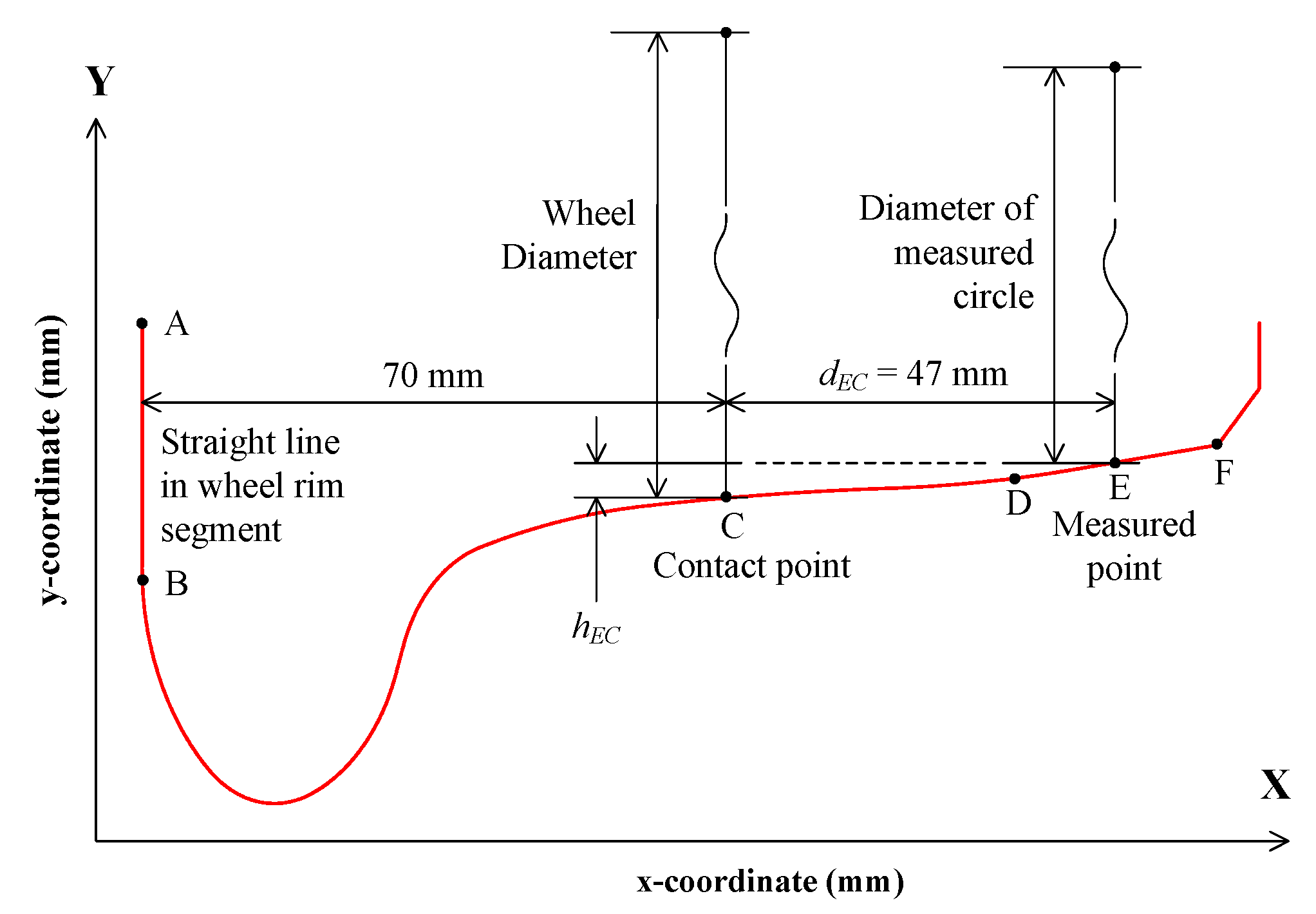
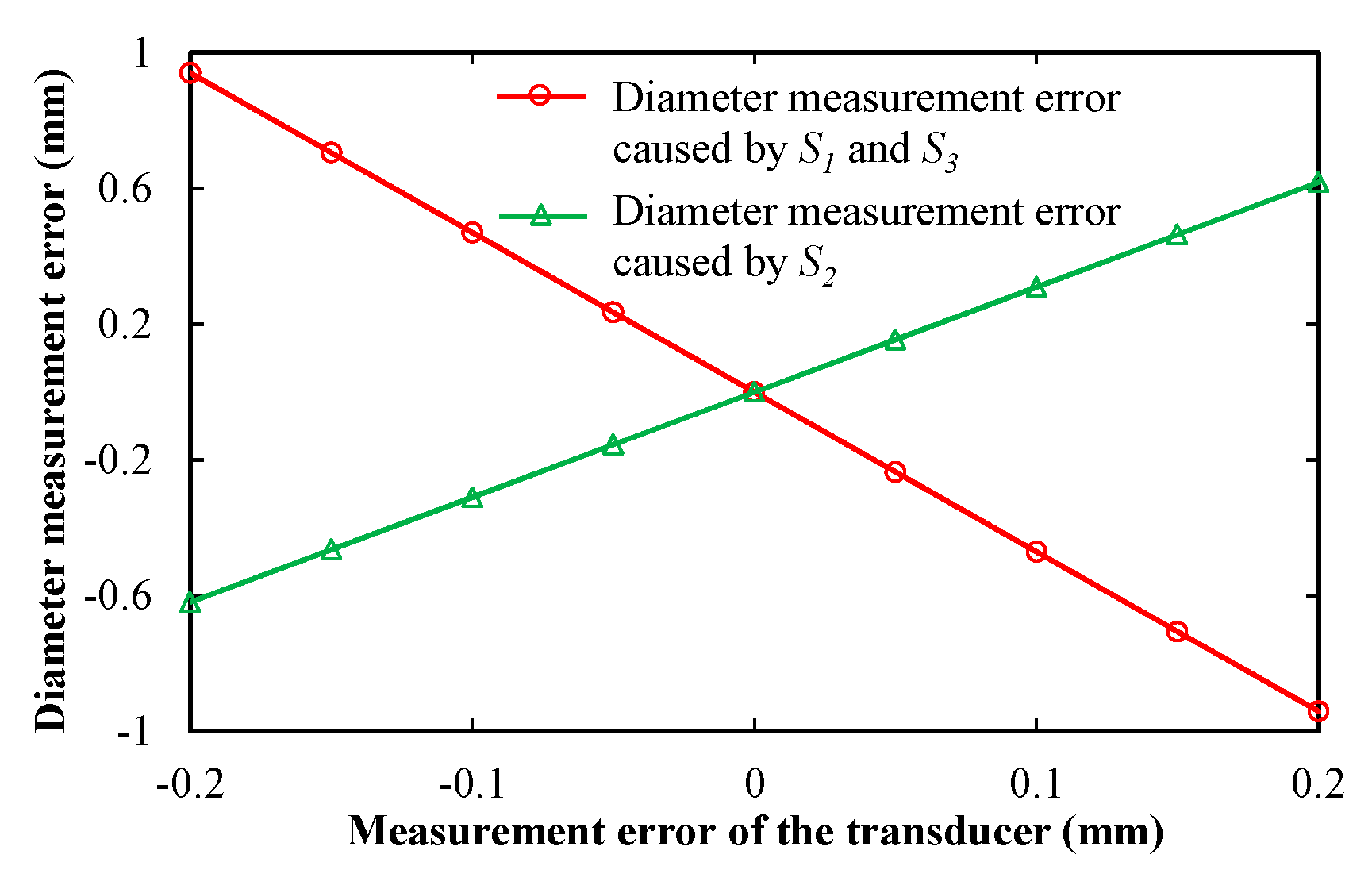
3. Measurement Error Analysis
3.1. Measurement Error of the Transducer
3.2. Positioning Error of the Wheel
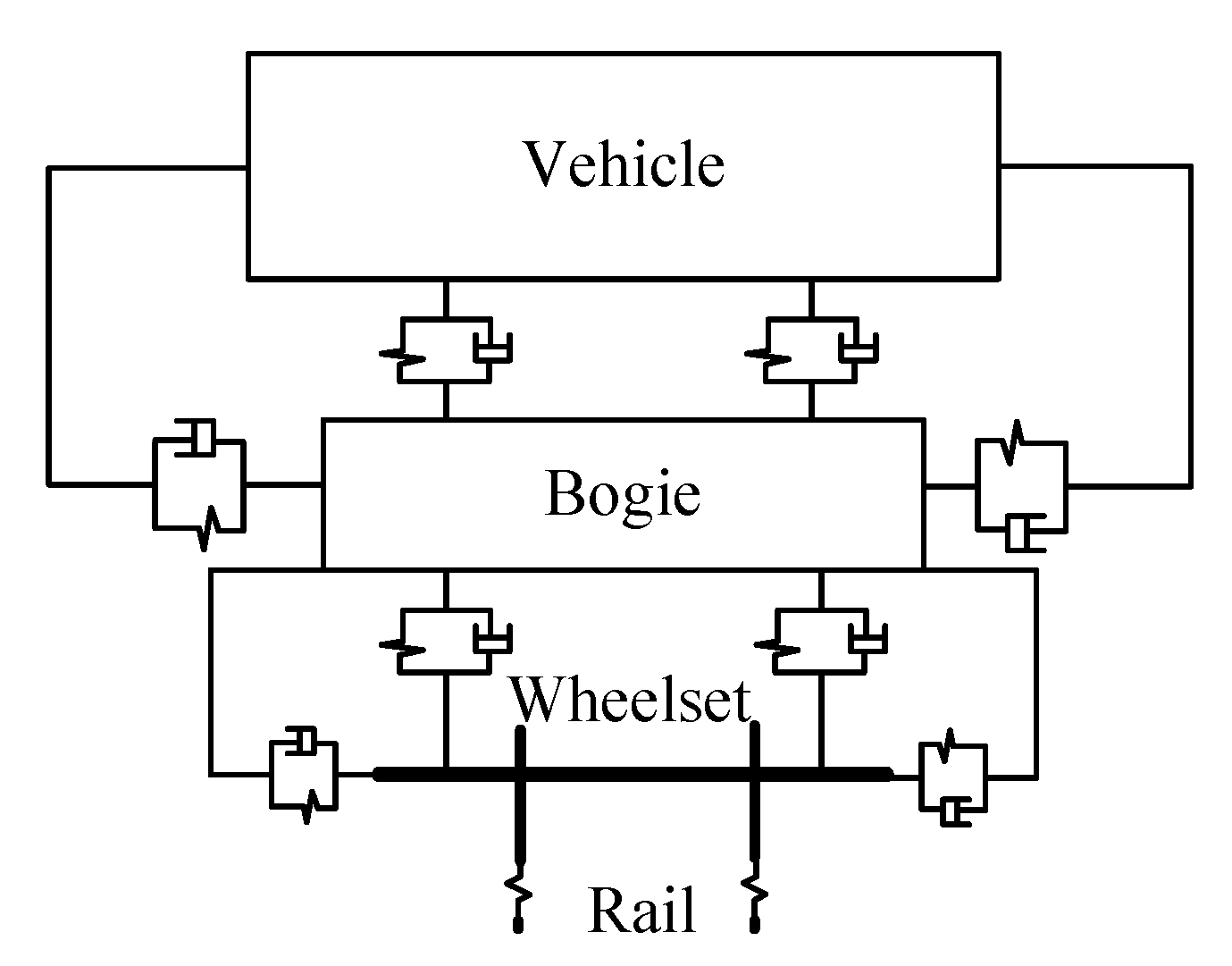
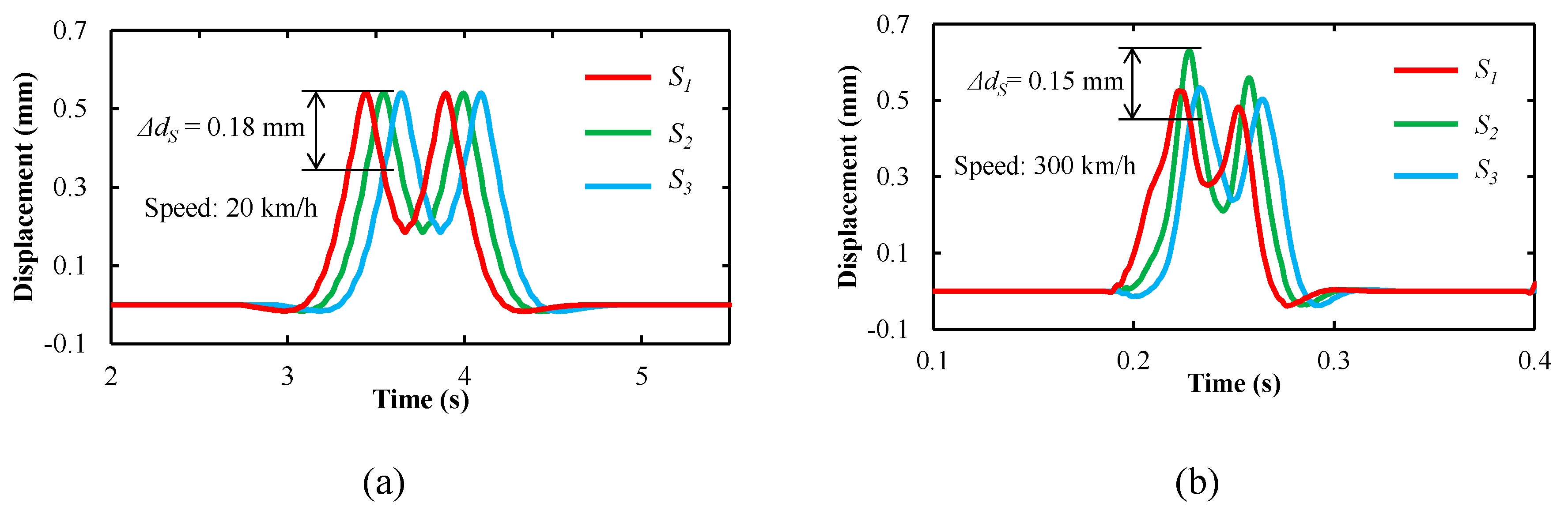
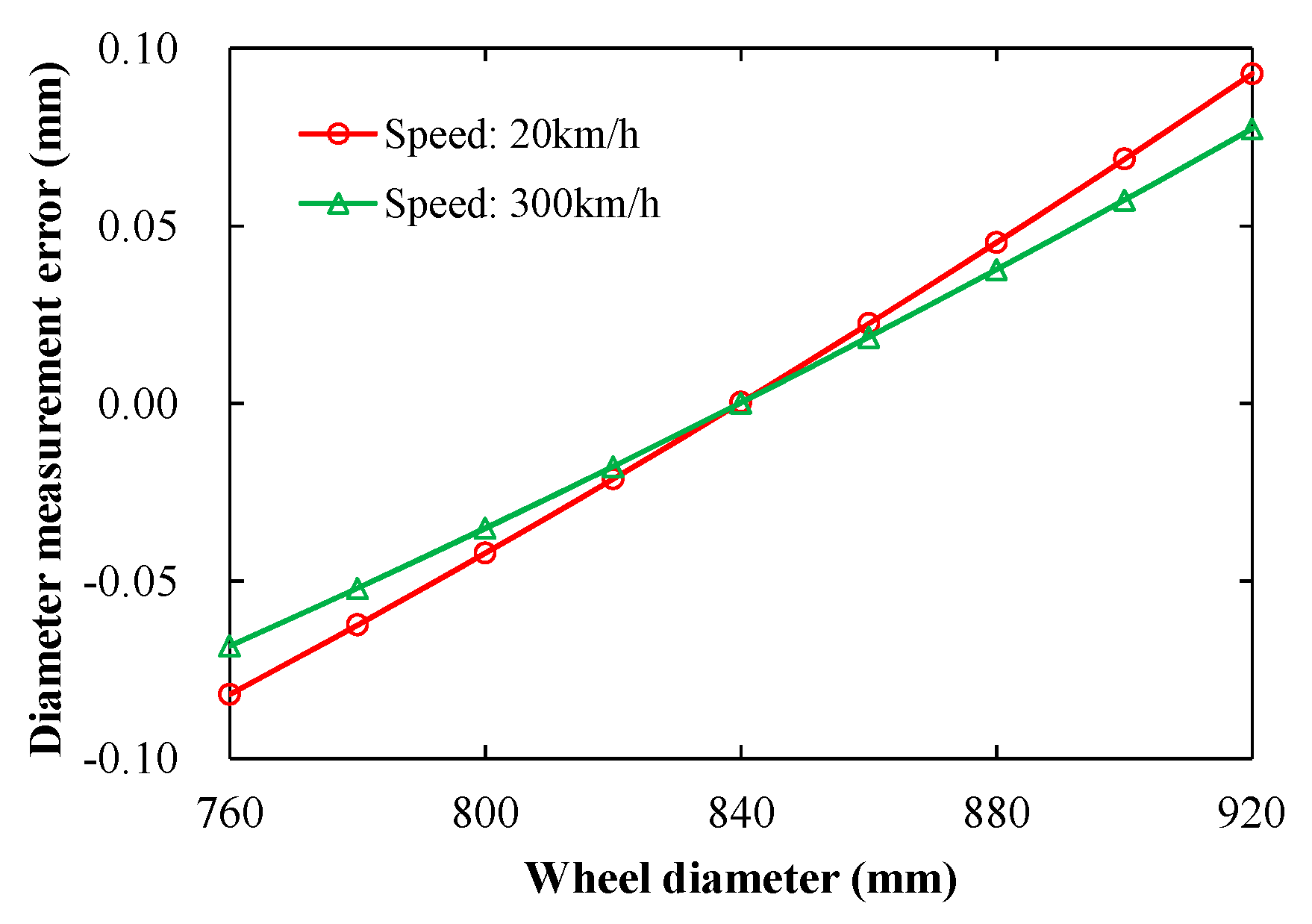
3.3. S-Shaped Motion of the Wheel
3.4. Rail Deformation
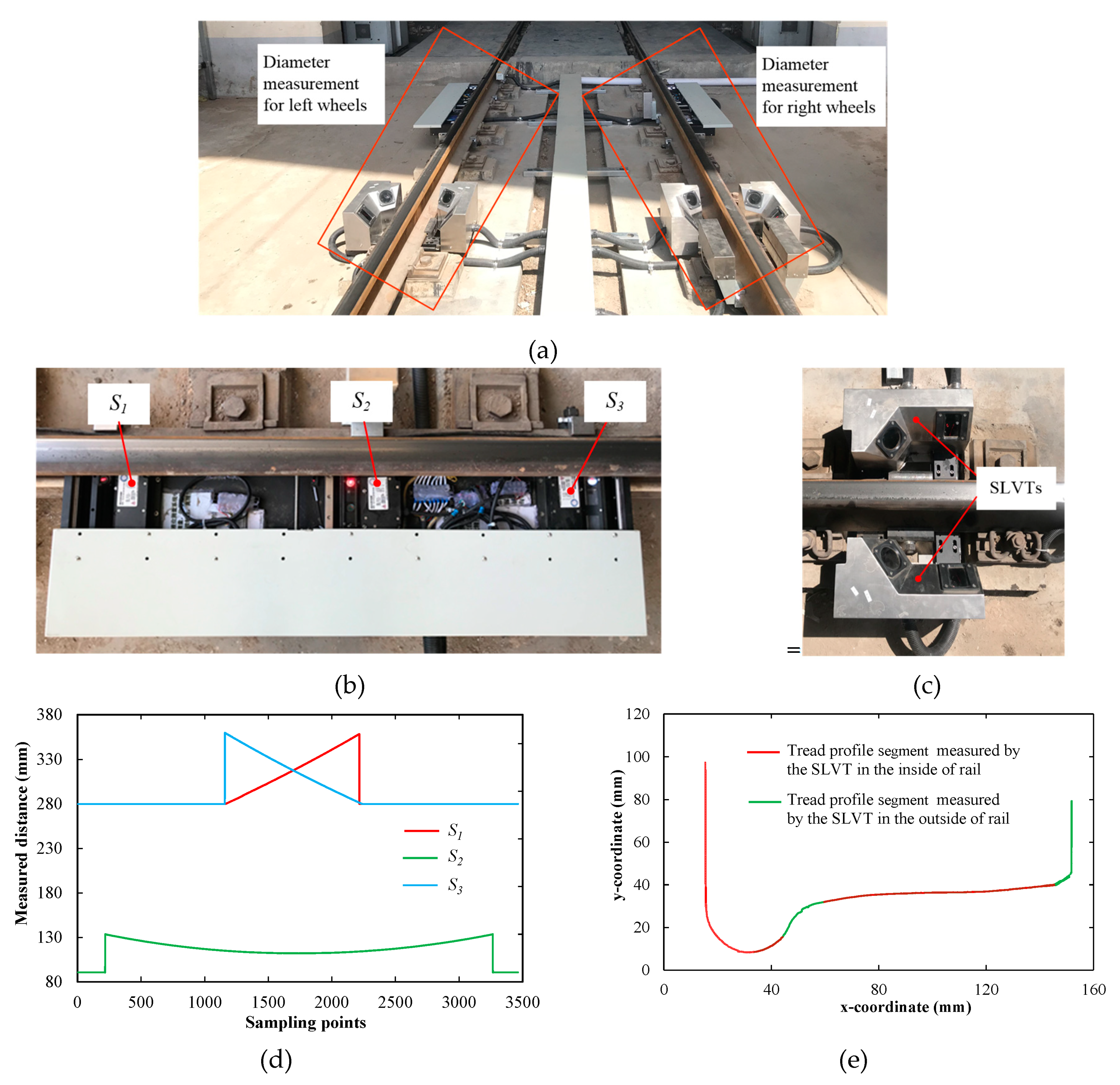
4. Field Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhong, W.; Hu, J.J.; Shen, P.; Wang, C.Y.; Lius, Q.Y. Experimental investigation between rolling contact fatigue and wear of high-speed and heavy-haul railway and selection of rail material. Wear 2011, 271, 2485–2493. [Google Scholar] [CrossRef]
- British Standard. Railway Applications. In-Service Wheelset Operation Requirements. In-Service and off-Vehicle Wheelset Maintenance; BS EN 15313; British Standards Institution: London, Britain, 2016. [Google Scholar]
- Riftek. Wheel Diameter Measuring Gauge. Available online: https://riftek.com/eng/products/~show/instruments/railway-devices/wheel-diameter-measuring-gauge-idk (accessed on 10 August 2019).
- Torabi, M.; Mousavi, S.G.M.; Younesian, D. A High Accuracy Imaging and Measurement System for Wheel Diameter Inspection of Railroad Vehicles. IEEE Trans. Ind. Electron. 2018, 65, 8239–8249. [Google Scholar] [CrossRef]
- Qibo, F.; Shinqian, C. A new method for automatically measuring geometric parameters of wheel-sets by laser. Proc. SPIE 2003, 5253, 110–113. [Google Scholar]
- Wu, K.; Wang, A.; Zhang, J.; Zhang, Y.; Ishii, Y.; Yan, K. Online measuring method of the wheel set wear based on CCD and image processing. Int. Soc. Opt. Photonics 2005, 5633, 409–415. [Google Scholar]
- Hegenscheidt-MFD. Machines Used in Wheelset Machining. Available online: https://www.hegenscheidt-mfd.com/en/railway-technology/machines-used-in-wheelset-machining/ (accessed on 10 August 2019).
- Cheng, X.; Chen, Y.; Xing, Z.; Li, Y.; Qin, Y. A Novel Online Detection System for Wheelset Size in Railway Transportation. J. Sens. 2016, 2016, 9507213. [Google Scholar] [CrossRef]
- Xing, Z.; Chen, Y.; Wang, X.; Qin, Y.; Chen, S. Online detection system for wheel-set size of rail vehicle based on 2D laser displacement sensors. Opt. -Int. J. Light Electron Opt. 2016, 127, 1695–1702. [Google Scholar] [CrossRef]
- IEM. Wheel Profile System. Available online: http://www.iem.net/products?id=150 (accessed on 10 August 2019).
- KLD Labs, Inc. Wheel Profile Measurement. Available online: http://www.kldlabs.com/index.php?s=%20wheel+profile+measurement (accessed on 10 August 2019).
- MERMEC. Profile and Diameter. Available online: http://www.mermecgroup.com/%20diagnosticsolutions/trainmonitoring/87/wheelprofile-and-diameter.php (accessed on 10 August 2019).
- Chinese Standard. Temporary Technical Requirements of On-Line Fault Detection System for Passenger Train; TJ/CL405-2014; China Railway: Beijing, China, 2014. [Google Scholar]
- Naumann, H.J. Wheelset Sensing System. U.S. Patent 5,767,973, 16 June 1998. [Google Scholar]
- Qibo, F.; Zhifeng, Z.; Shiqian, C.; Yan, G.; Jianying, C. A Novel Method for Dynamically Measuring Diameters of Train Wheels Using Laser Displacement Transducers. Chin. J. Lasers 2008, 35, 1059–1062. [Google Scholar] [CrossRef]
- Gao, Y.; Feng, Q.; Cui, J. A simple method for dynamically measuring the diameters of train wheels using a one-dimensional laser displacement transducer. Opt. Lasers Eng. 2014, 53, 158–163. [Google Scholar] [CrossRef]
- Chen, X.; Sun, J.; Liu, Z.; Zhang, G. Dynamic tread wear measurement method for train wheels against vibrations. Appl. Opt. 2015, 54, 5270–5280. [Google Scholar] [CrossRef] [PubMed]
- Gong, Z.; Sun, J.; Zhang, G. Dynamic Measurement for the Diameter of a Train Wheel Based on Structured-Light Vision. Sensors 2016, 16, 564. [Google Scholar] [CrossRef]
- Micro-Epsilon. Optoncdt 2300. Available online: https://www.micro-epsilon.com/displacement-position-sensors/laser-sensor/optoNCDT_2300_basic/ (accessed on 13 September 2019).
- Dassault Systemes. Abaqus CAE. Available online: https://www.3ds.com/products-services/simulia/products/abaqus/abaquscae/ (accessed on 13 September 2019).
- Dassault Systemes. Simpack. Available online: https://www.3ds.com/products-services/simulia/products/simpack/ (accessed on 13 September 2019).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Mass of car body | 3.43 × 104 kg | Pitch moment of inertia of bogie | 1205 kg∙m2 |
| Mass of bogie | 2235 kg | Yaw moment of inertia of bogie | 2792 kg∙m2 |
| Mass of wheel | 1200 kg | Stiffness of primary suspension system | 9.198 × 105 N/m |
| Roll moment of inertia of car body | 9.25 × 104 kg∙m2 | Stiffness of secondary suspension system | 1.33 × 105 N/m |
| Pitch moment of inertia of car body | 1.756 × 105 kg∙m2 | Damping of primary suspension system | 1 × 104 N∙s/m |
| Yaw moment of inertia of car body | 1.728 × 105 kg∙m2 | Damping of secondary suspension system | 8400 N∙s/m |
| Roll moment of inertia of bogie | 1846 kg∙m2 |
| Number | Data and Time | Train Speed (km/h) | Temperature (°) | Wheel No. | |||
|---|---|---|---|---|---|---|---|
| 1 (mm) | 2 (mm) | 3 (mm) | 4 (mm) | ||||
| 1 | 18:21, 4 June, 2019 | 3.1 | 26.6 | 891.10 | 881.64 | 887.67 | 889.12 |
| 2 | 18:22, 5 June, 2019 | 3.5 | 28.4 | 890.68 | 881.45 | 887.59 | 889.09 |
| 3 | 23:08, 22 June, 2019 | 3.9 | 20.3 | 891.22 | 881.45 | 887.32 | 889.27 |
| Average value (mm) | 891.00 | 881.51 | 887.53 | 889.16 | |||
| Repeatability error (mm) | 0.27 | 0.09 | 0.17 | 0.09 | |||
| Result of the lathe (mm) | 889.38 | ||||||
| Deviation (mm) | 0.22 | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, F.; Zhang, B.; Gao, R.; Feng, Q. A High-Precision Method for Dynamically Measuring Train Wheel Diameter Using Three Laser Displacement Transducers. Sensors 2019, 19, 4148. https://doi.org/10.3390/s19194148
Zheng F, Zhang B, Gao R, Feng Q. A High-Precision Method for Dynamically Measuring Train Wheel Diameter Using Three Laser Displacement Transducers. Sensors. 2019; 19(19):4148. https://doi.org/10.3390/s19194148
Chicago/Turabian StyleZheng, Fajia, Bin Zhang, Run Gao, and Qibo Feng. 2019. "A High-Precision Method for Dynamically Measuring Train Wheel Diameter Using Three Laser Displacement Transducers" Sensors 19, no. 19: 4148. https://doi.org/10.3390/s19194148