Design and Implementation of a Self-Powered Smart Water Meter



Abstract
:1. Introduction
2. Related Work
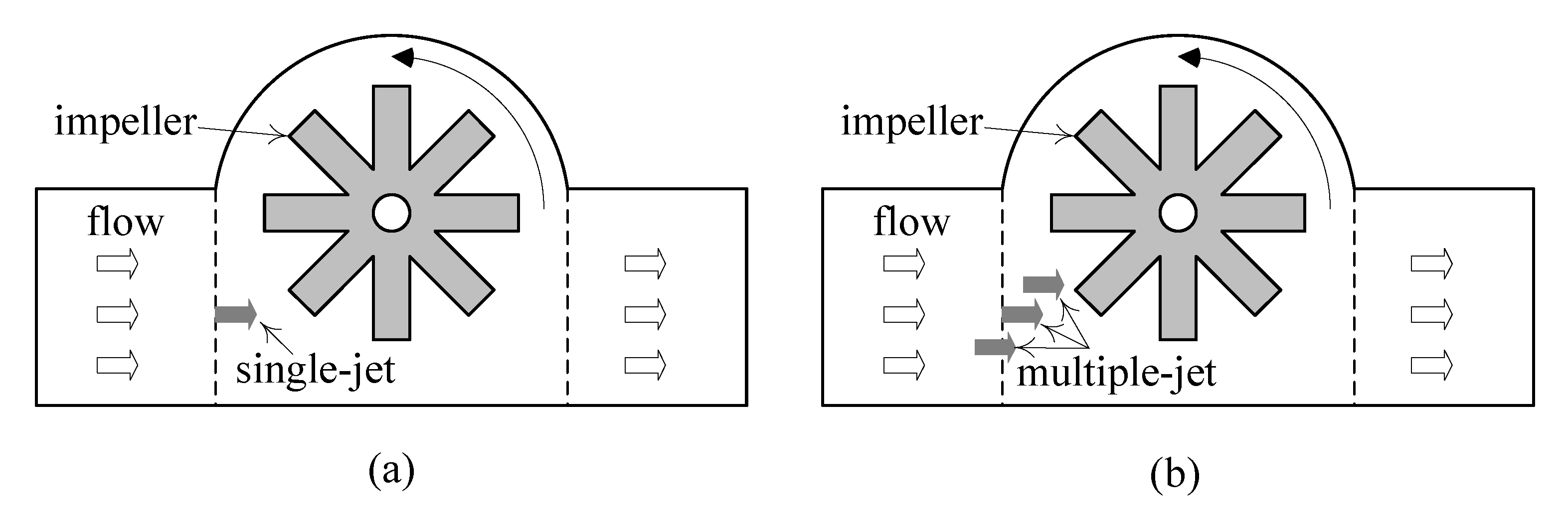
2.1. Velocity Measurement Meters
2.2. Positive Displacement Meters
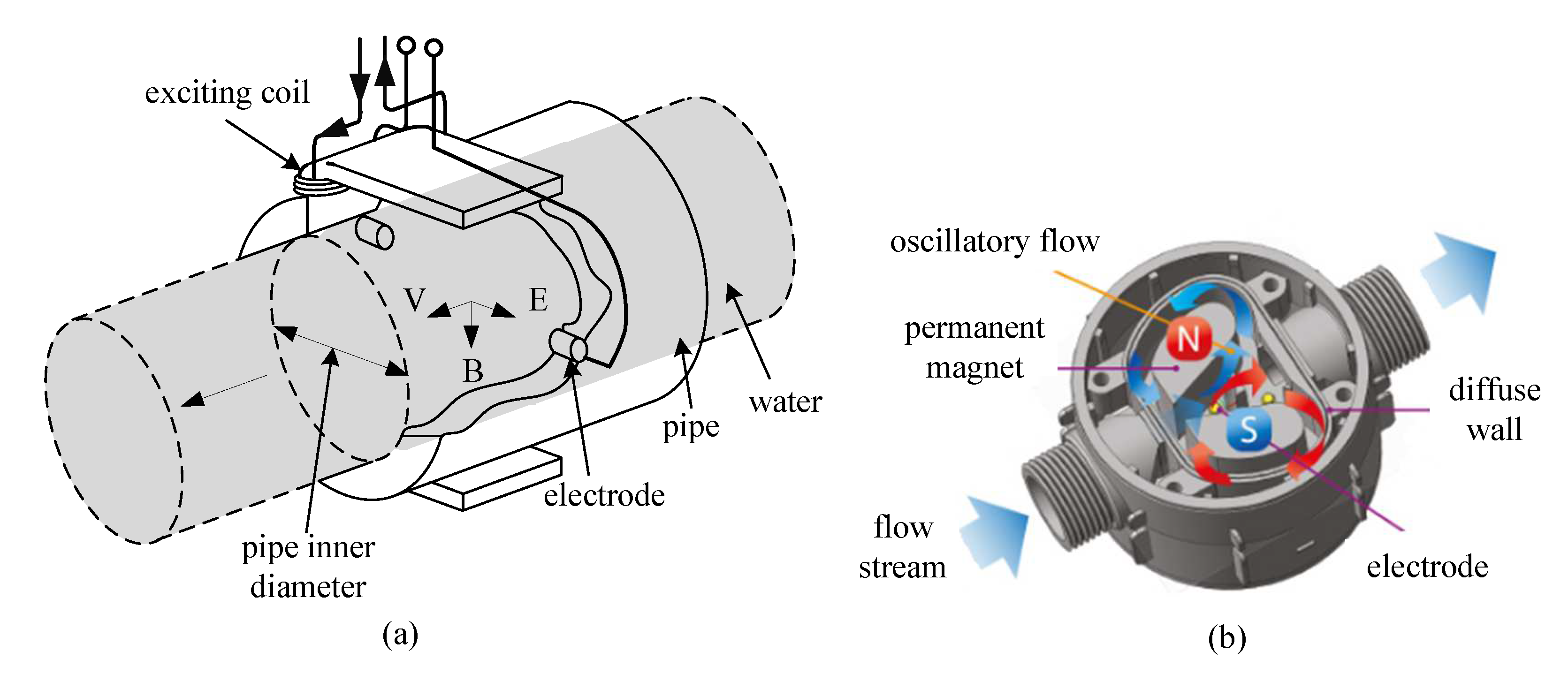
2.3. Electronic Meters
2.4. Smart Water Meters
3. Design of a Self-Powered Smart Water Meter
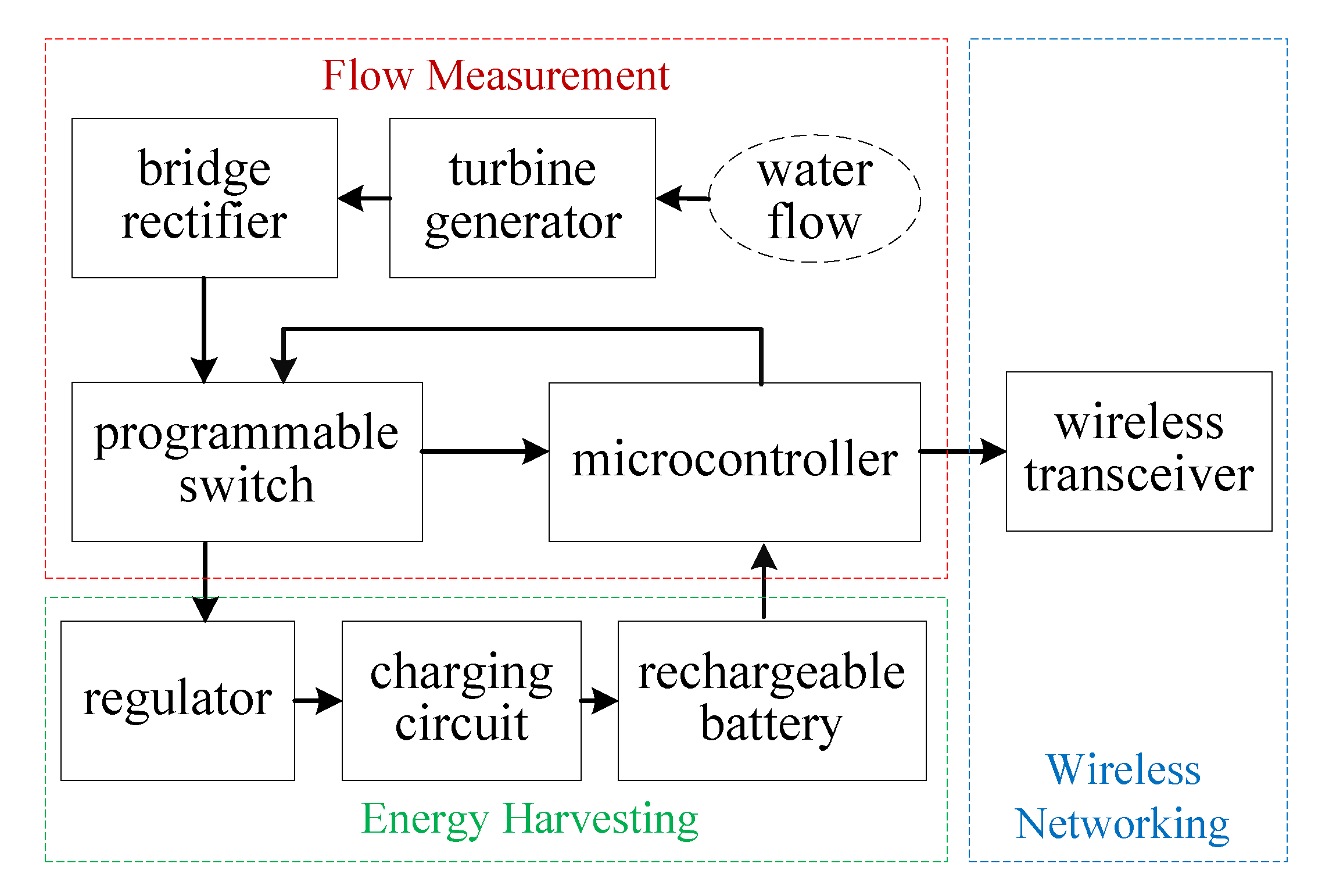
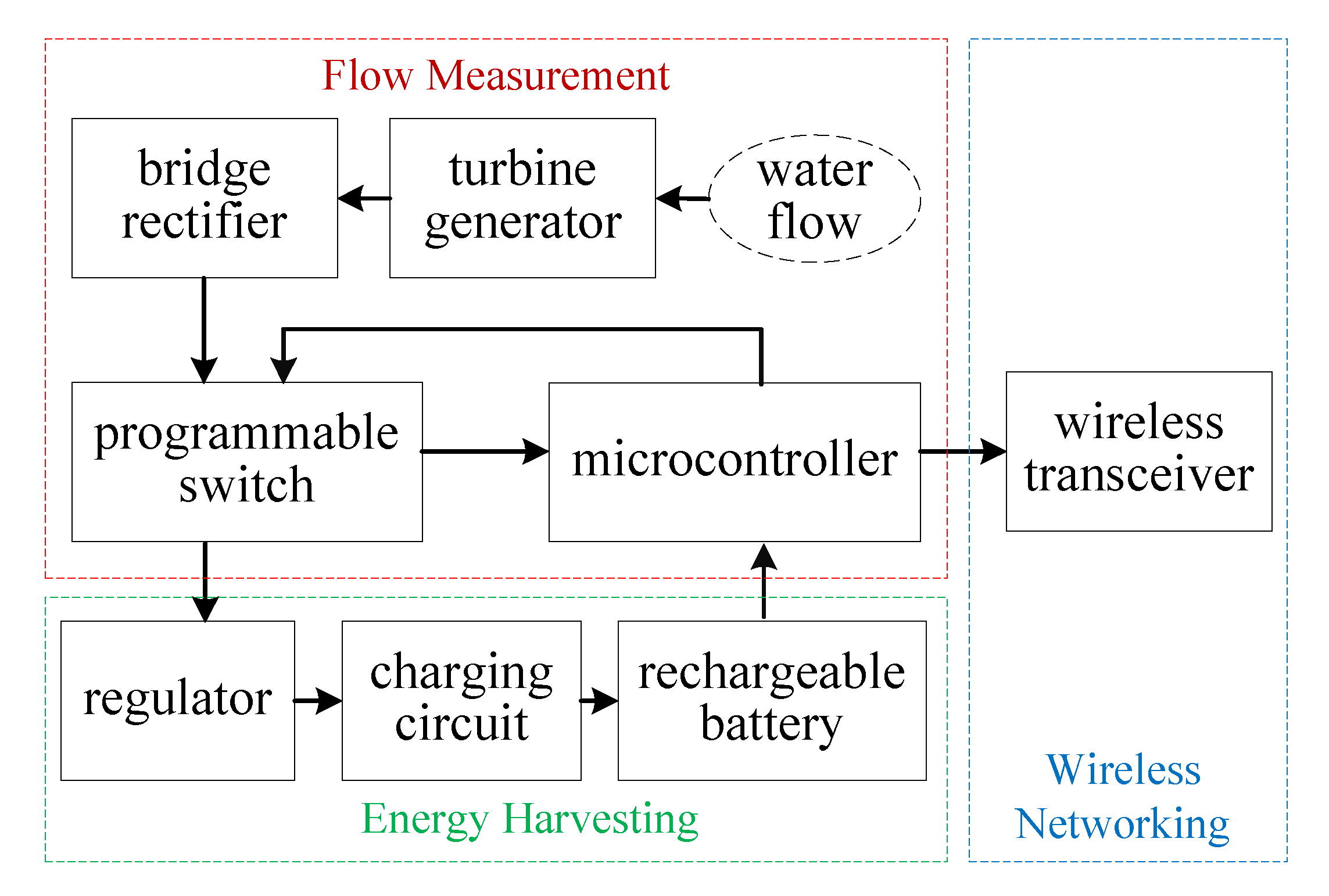
3.1. Block Diagram
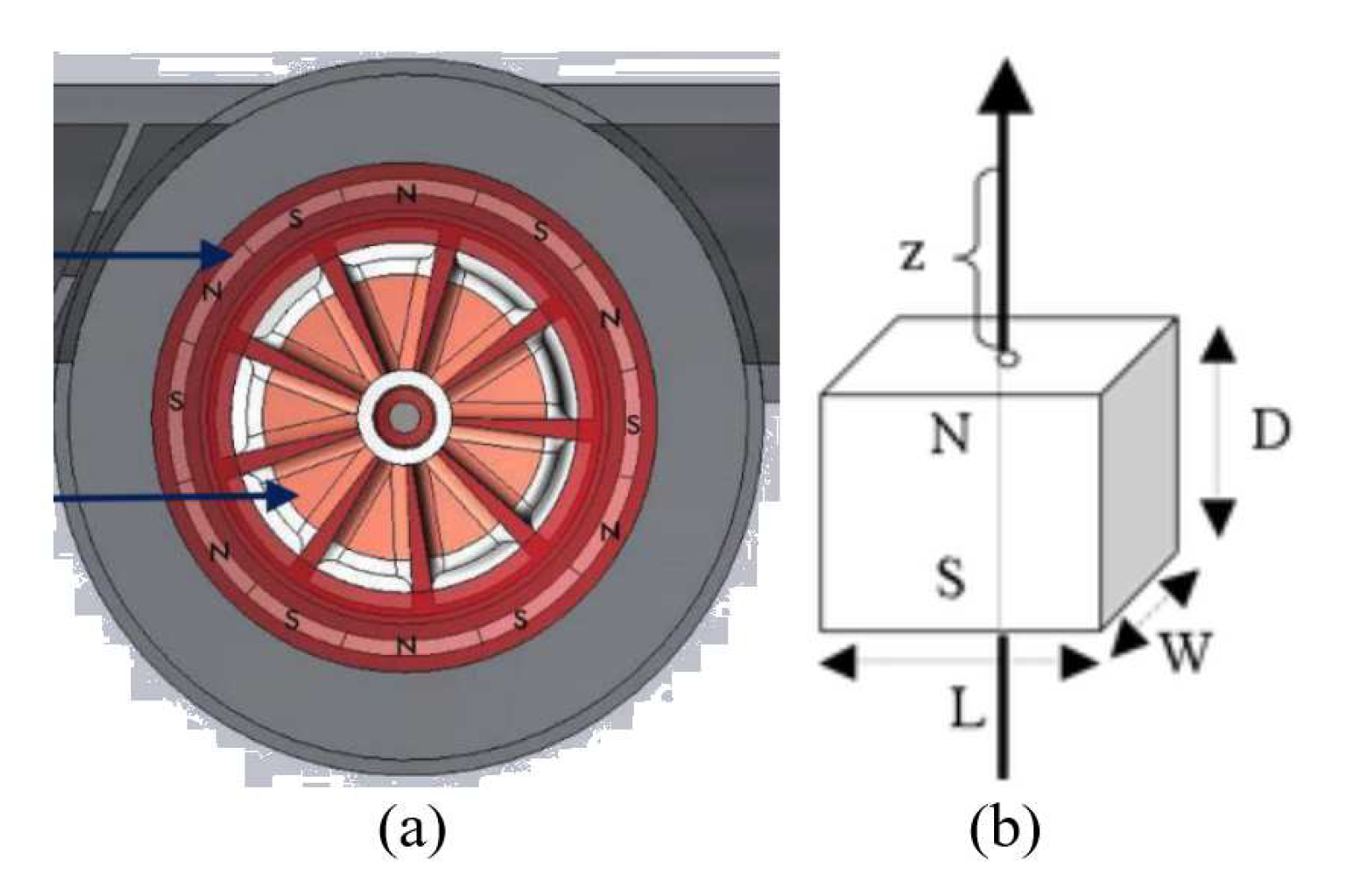
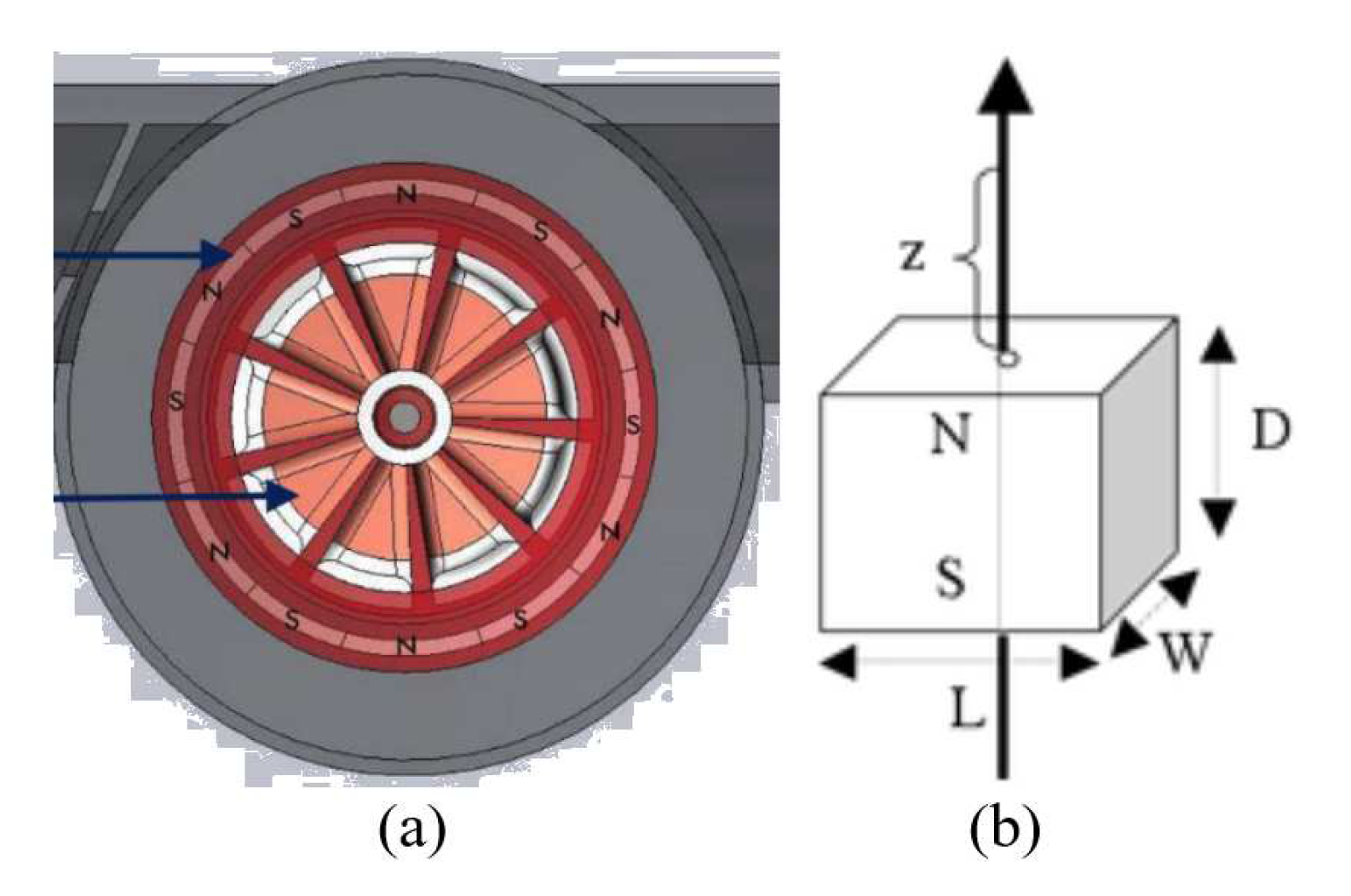
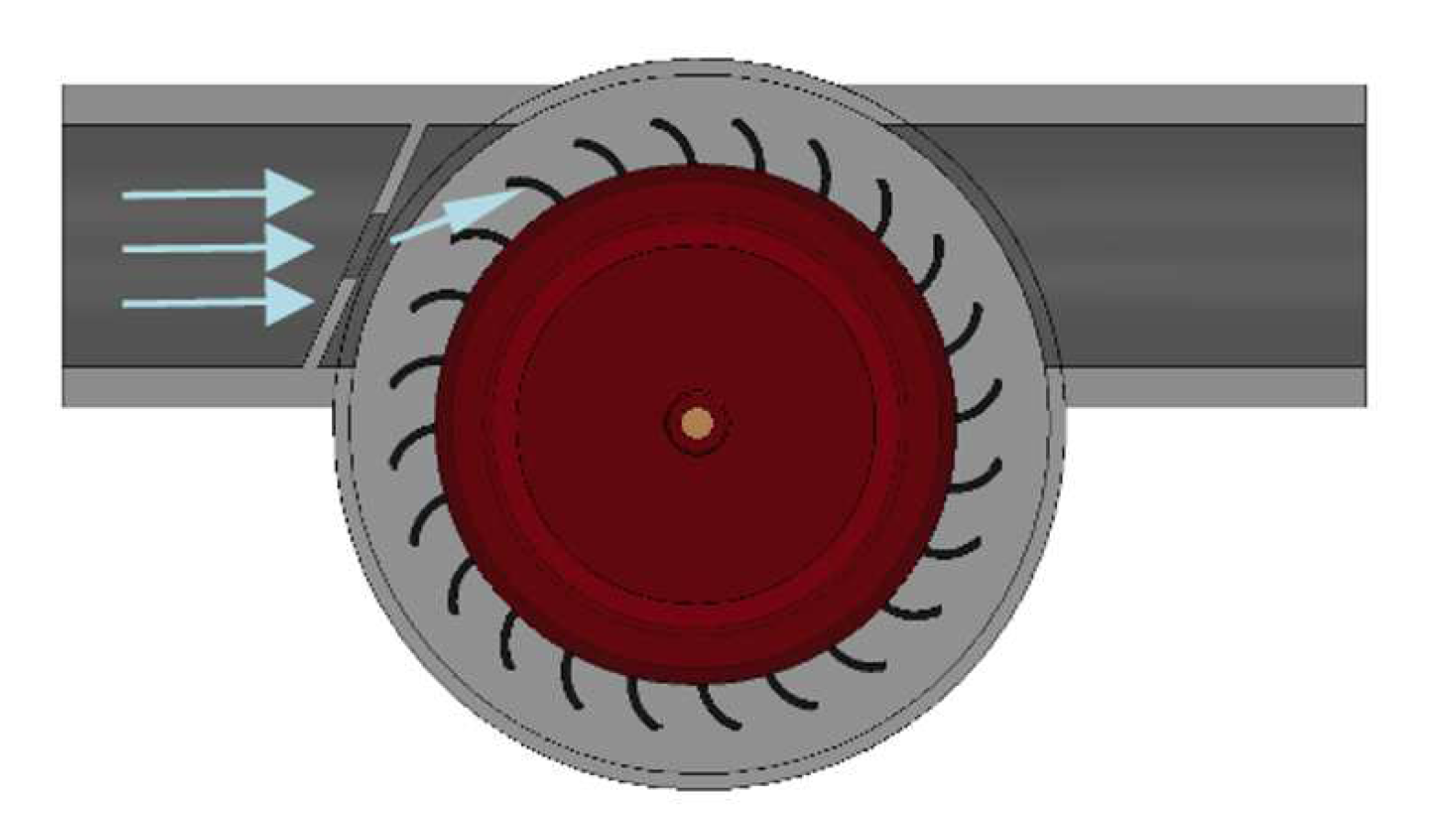
3.2. Water Turbine Generator
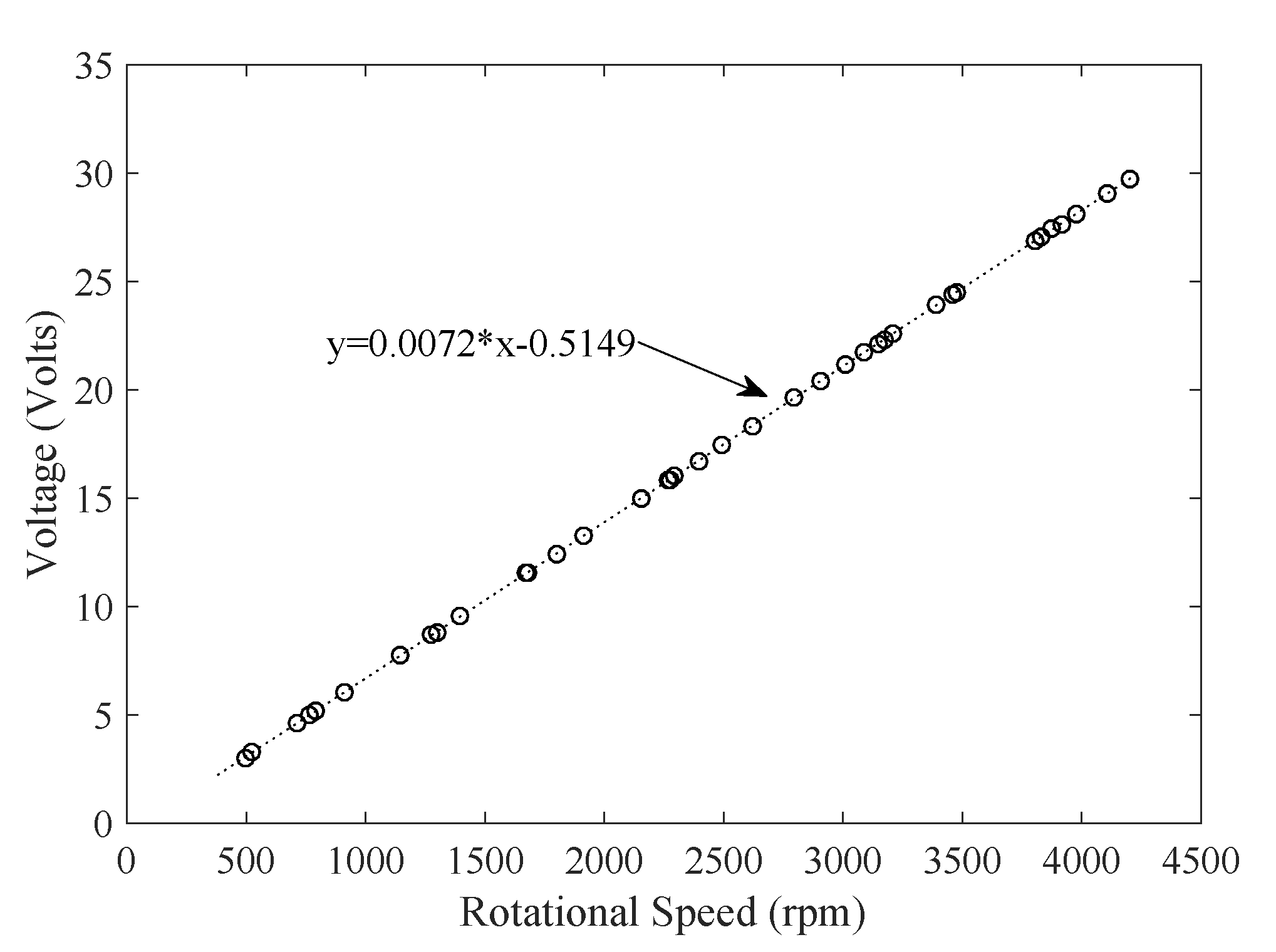
3.3. Voltage Generation
3.4. Rechargable Battery
3.5. Full-Wave Three Phase Rectifier
3.6. Signal Processing
3.7. PCB Design
3.8. Wireless Networking
4. Experiments and Results
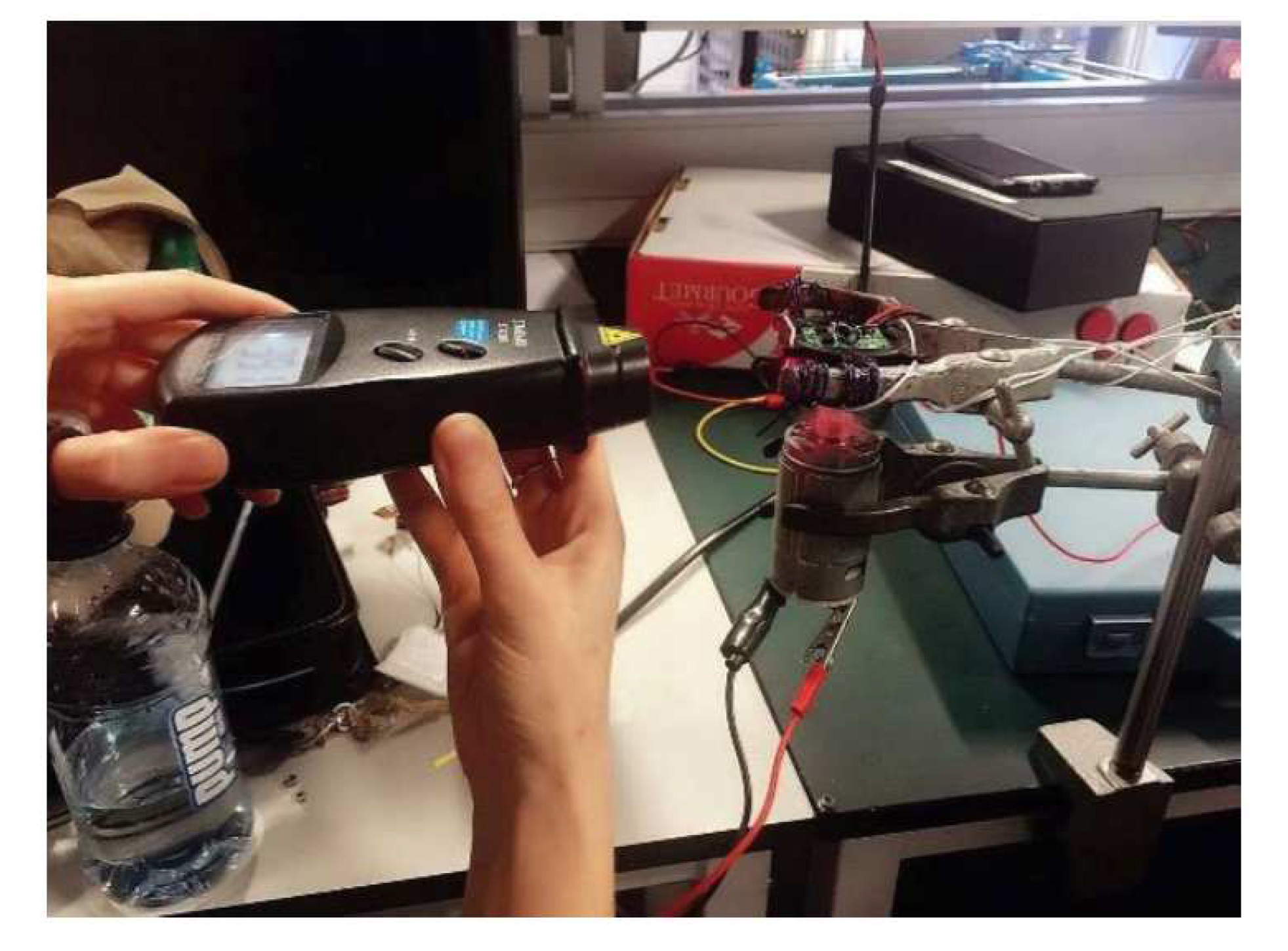
4.1. Test Apparatus
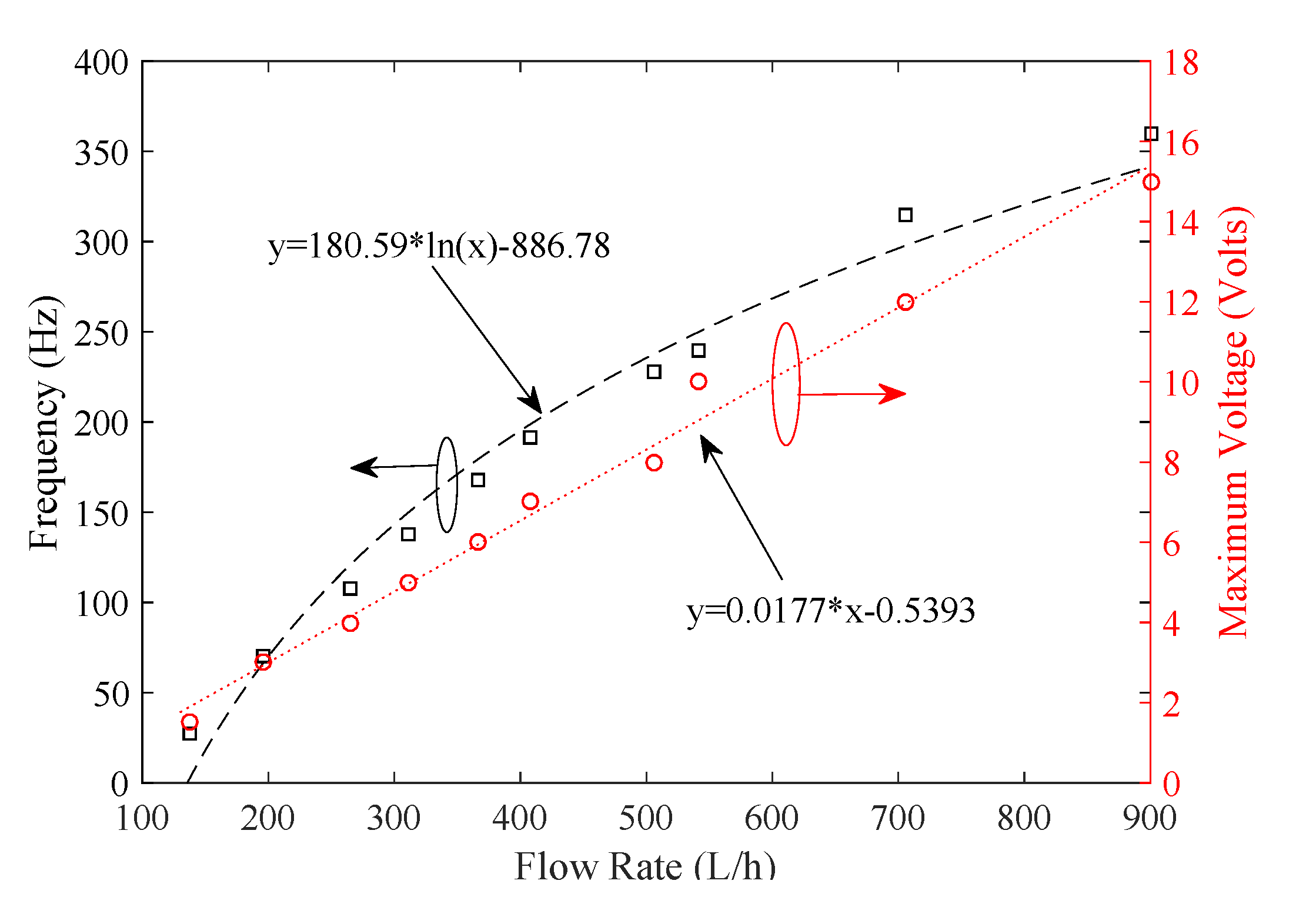
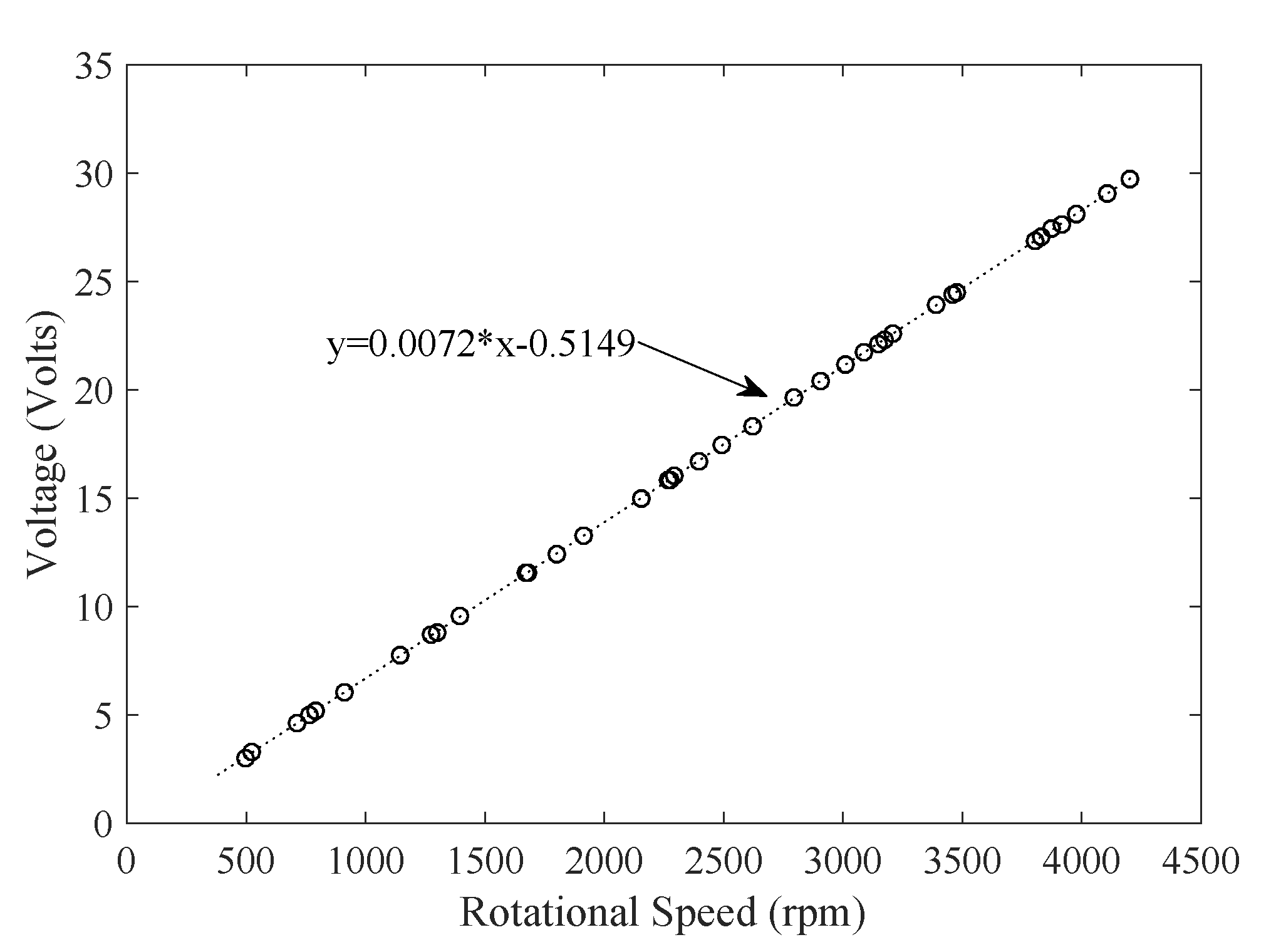
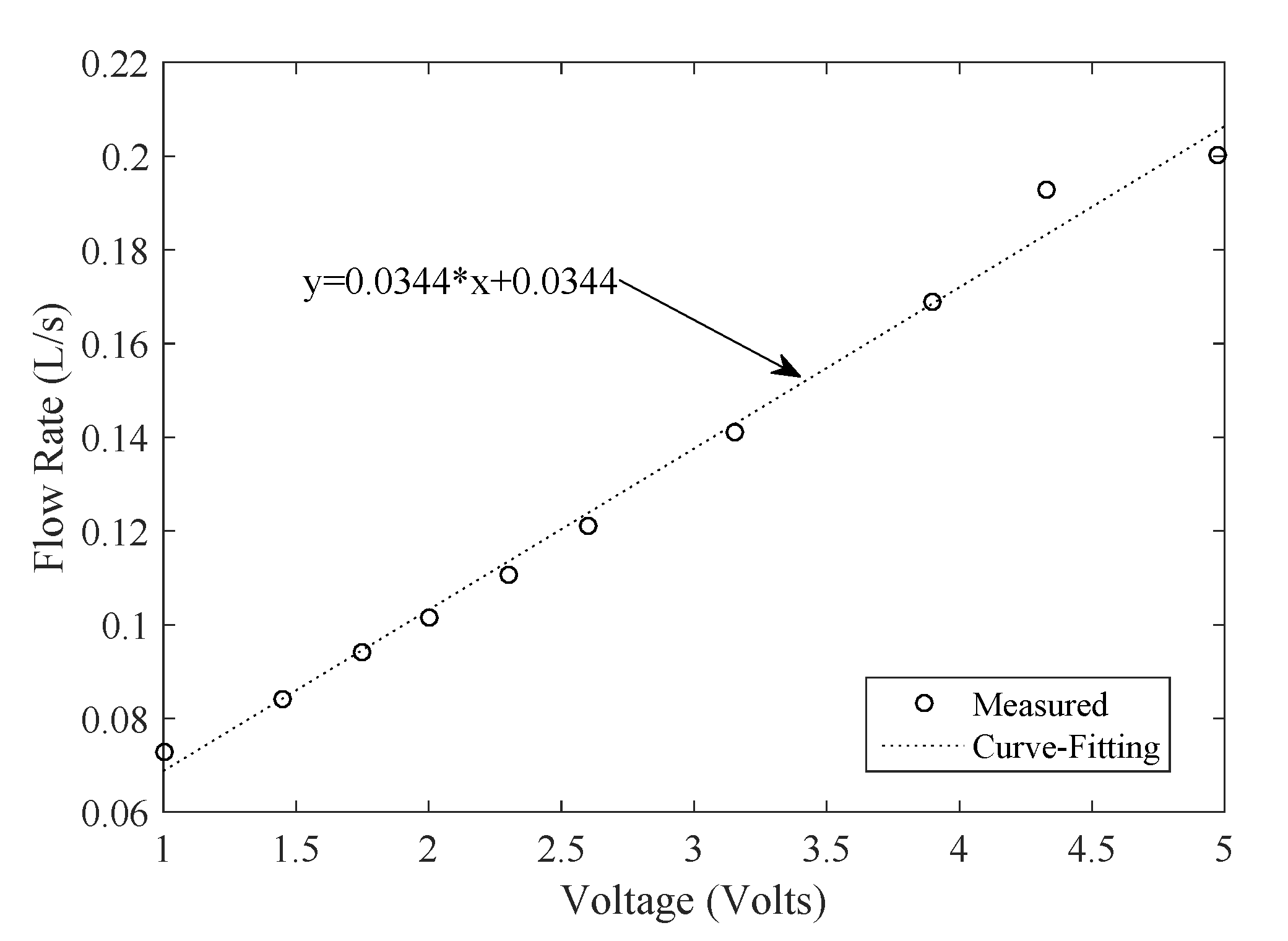
4.2. Meter Calibration
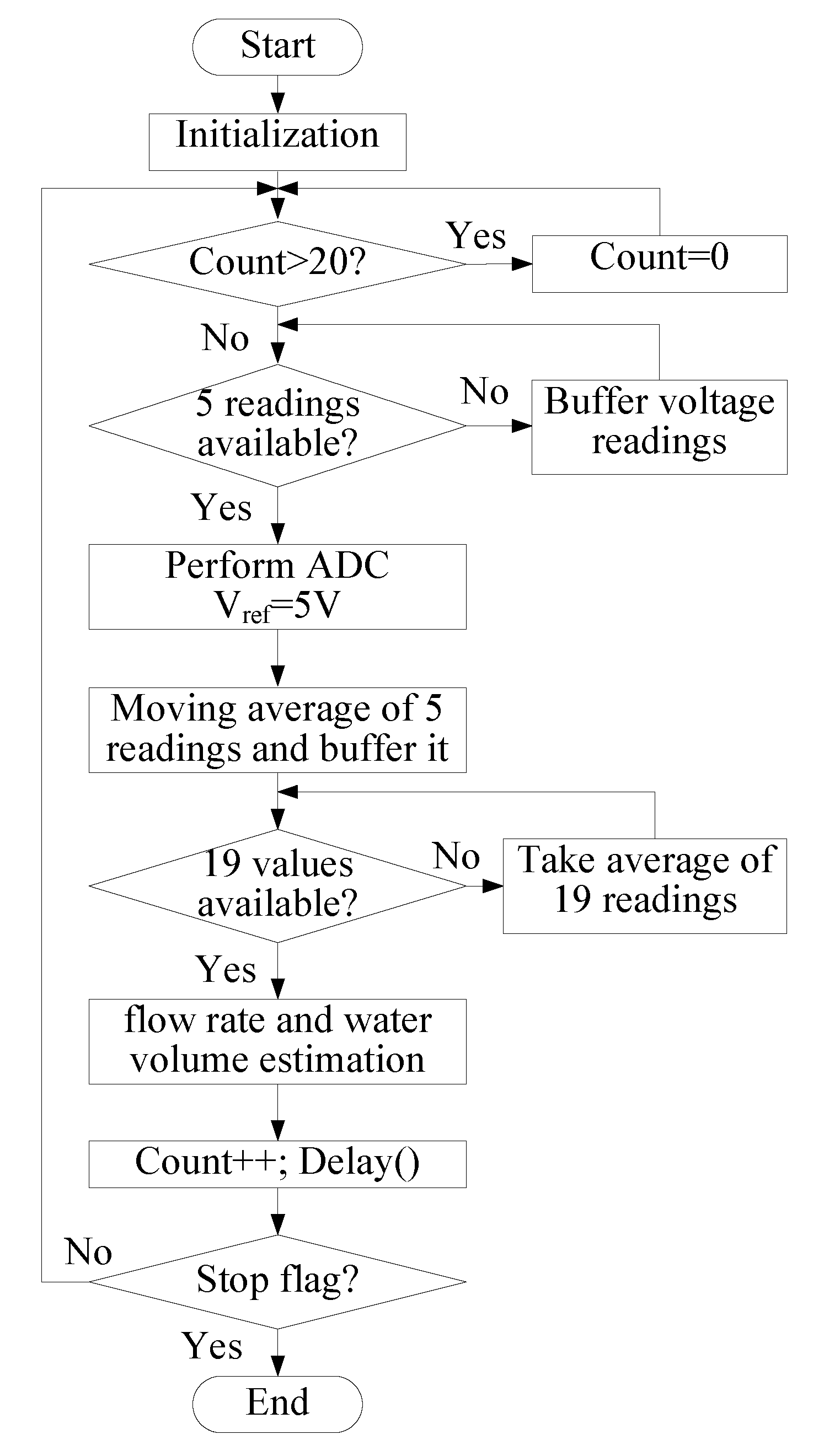
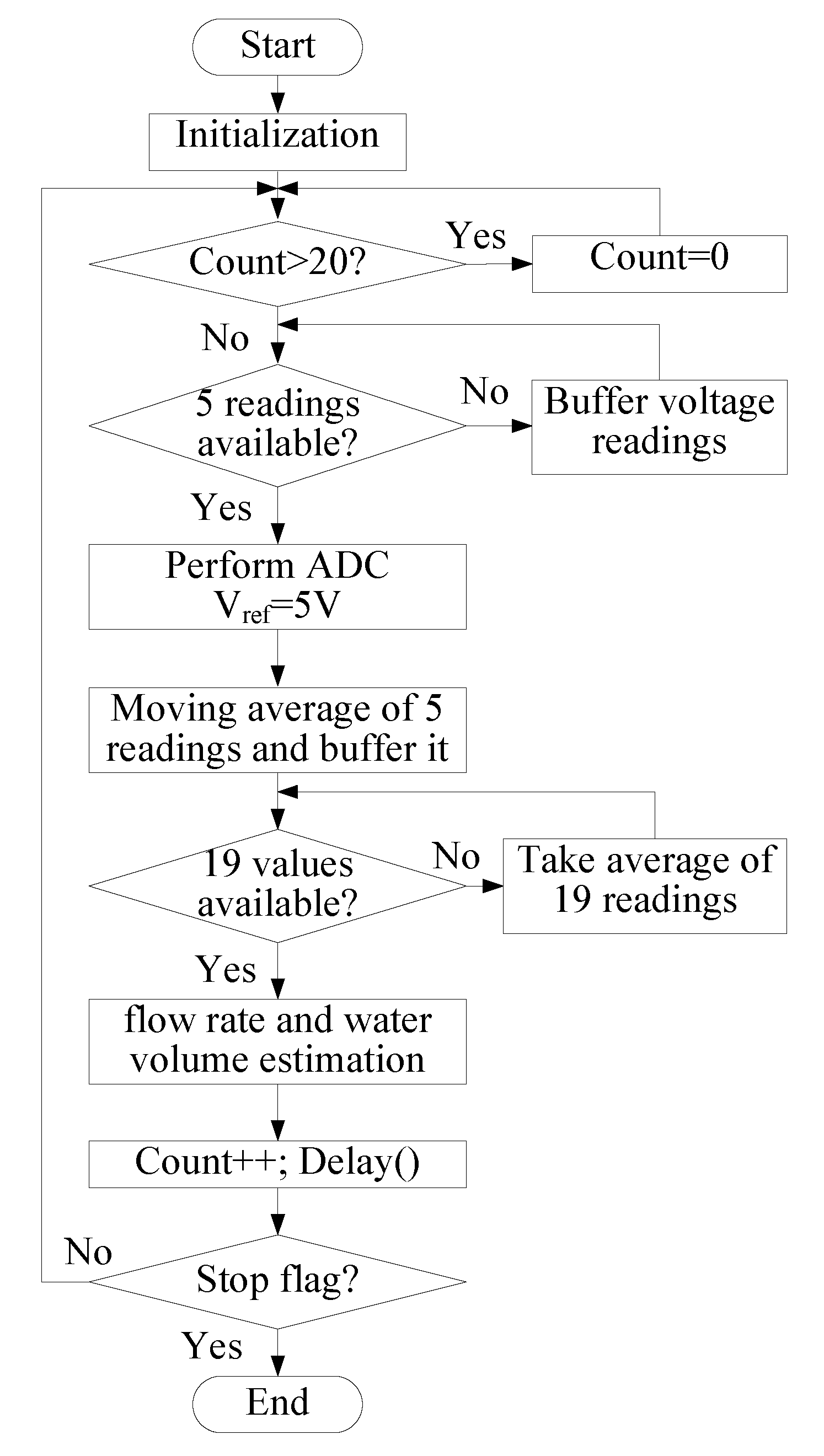
4.3. Smart Metering Algorithm
4.4. Comparison with Existing Smart Meters and Mechanical Water Meters
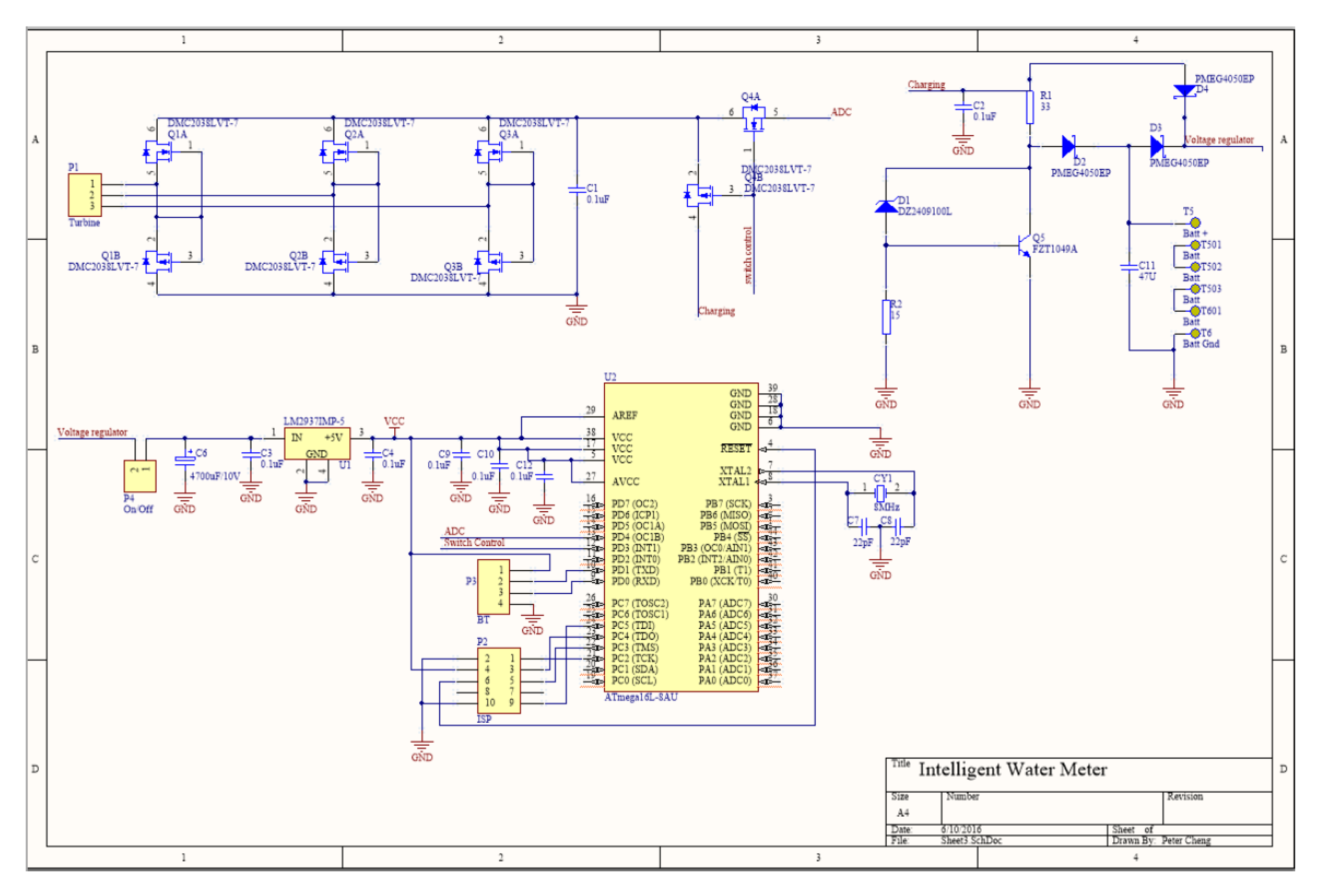
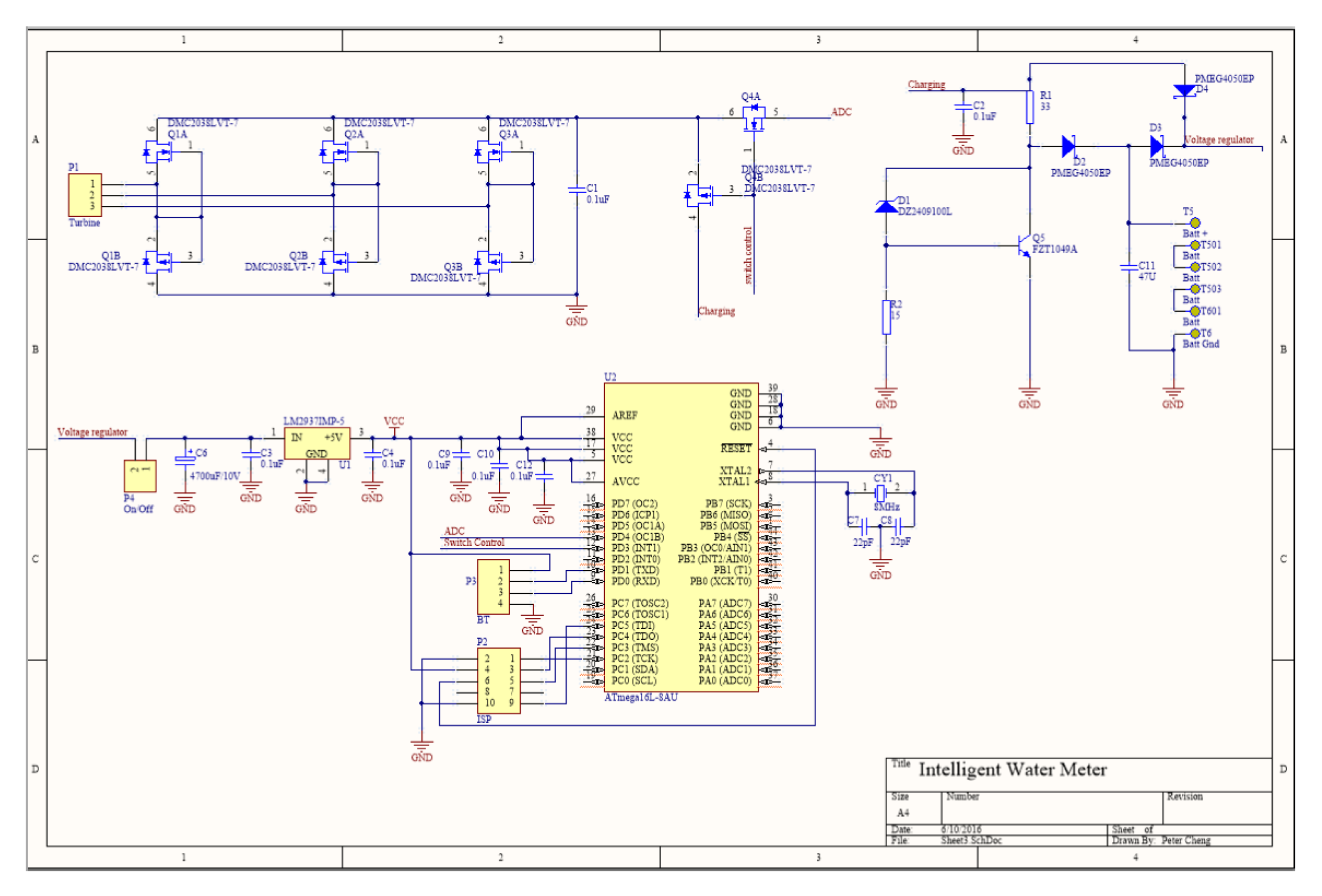
- We presented a complete design of the smart meter, including a customized printed circuit board using a microcontroller, a digital signal processing algorithm, and analysis of the design of a water turbine generator, while, in [30], the authors presented their design using the off-the-shelf products without alteration, such as a micro hydro turbine with DC output, charging module, battery, single-board computer (Raspberry Pi 3 Model B), Data Acquisition System (DATAQ instrument unit).
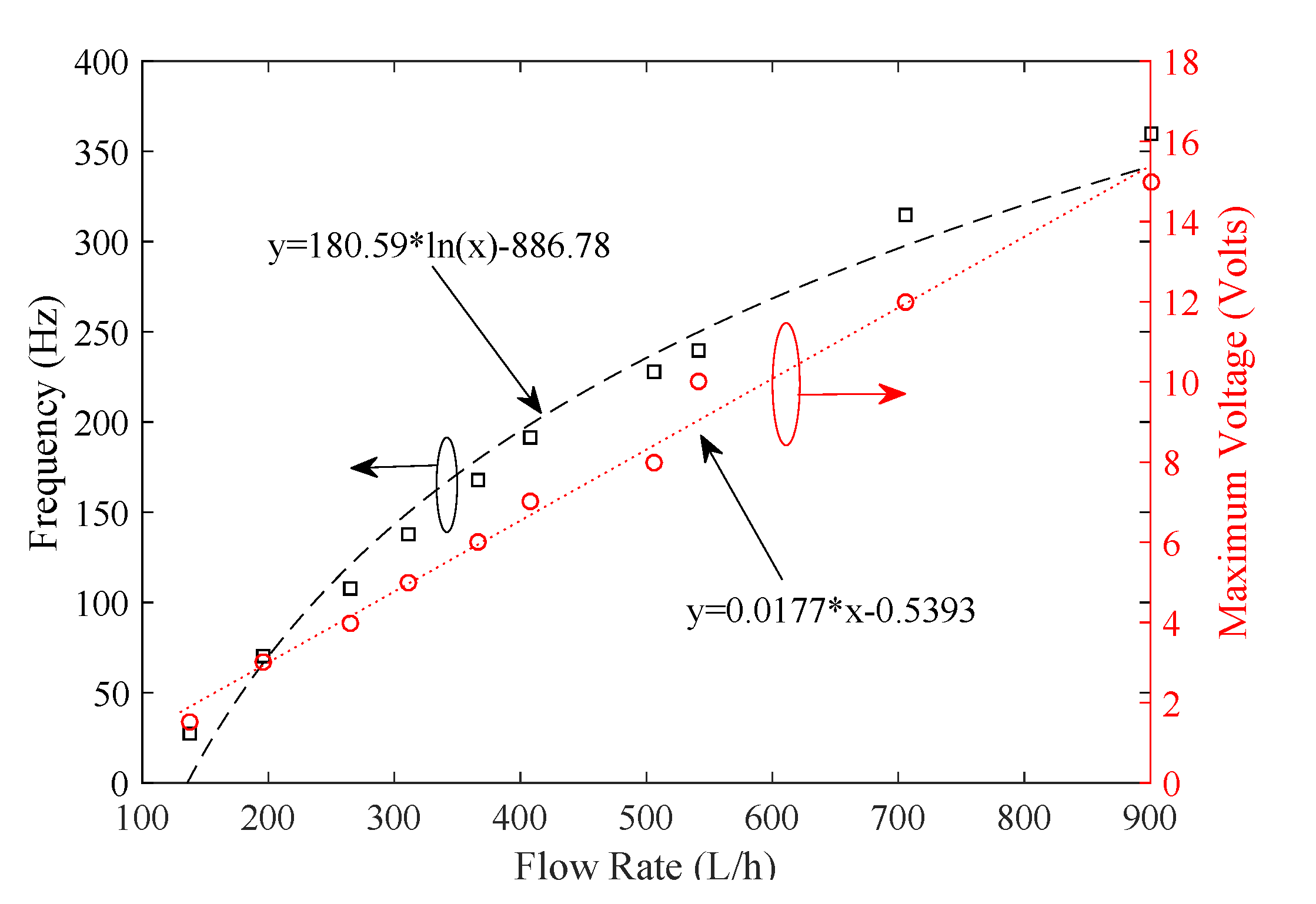
- We did not directly use the off-the-shelf water turbine generator. Instead, we removed its internal circuit board, used the existing coil windings and collected the generated AC signal to feed our customised PCB for signal processing and energy harvesting. However, the authors in [30] used the generated DC signal from an off-the-shelf micro hydro turbine. Therefore, we derived empirical formulas between the amplitude (and the frequency) of the generated voltage and water flow rate. However, no such information is provided in [30].
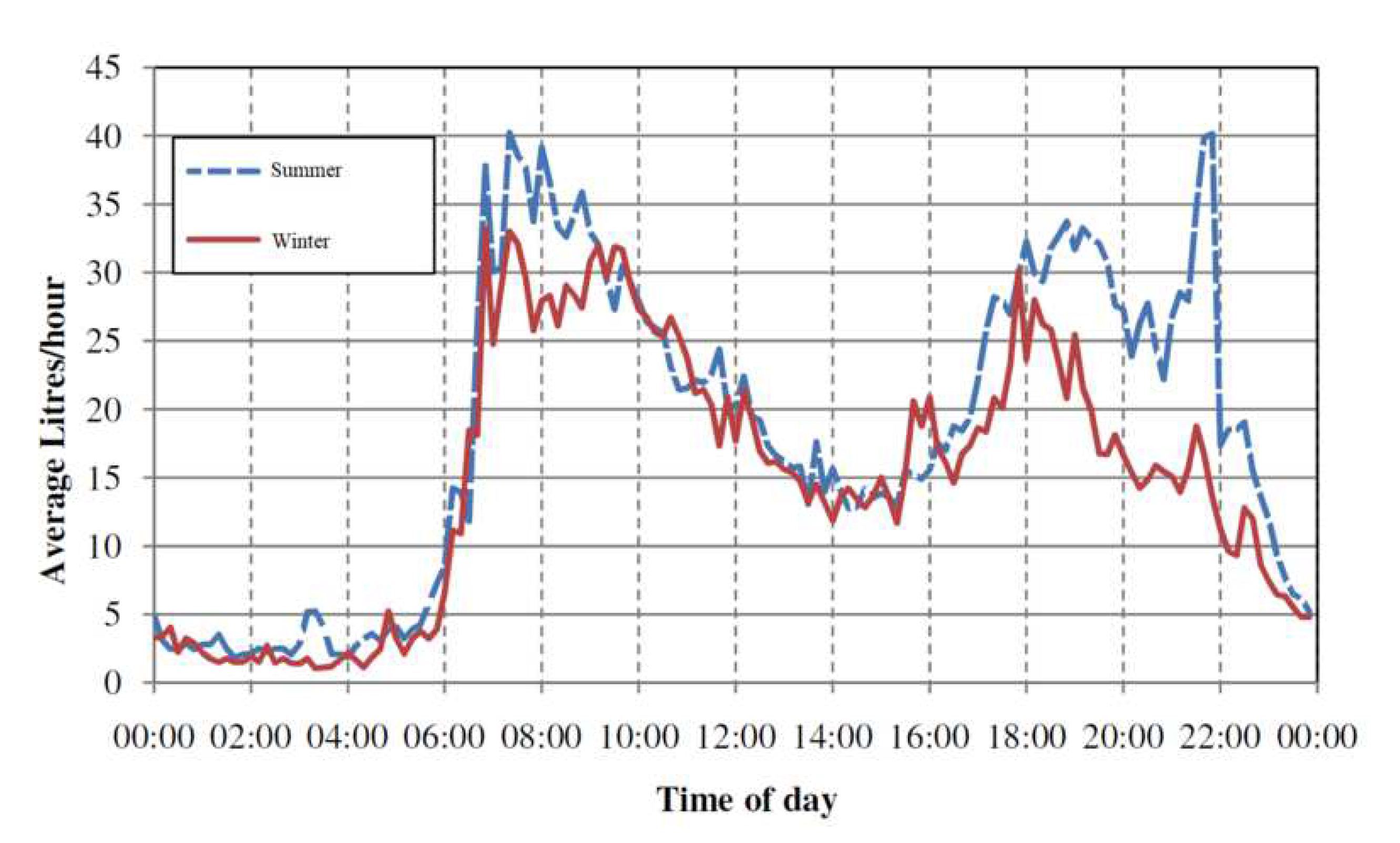
- We presented the analysis of water usage of a typical New Zealand house to show that the amount of energy to be harvested is adequate to power the smart meter. However, in [30], there is no such analysis.
- Our design is based on a 10 W–12 V water turbine generator with an inlet/outlet diameter of 15 mm, while, in [30], they used a 10 W–80 V water turbine generator with inlet/outlet diameter of 12.7 mm. The resulted measurement range is different. For our work, the measurement range is [200 650] L/h, and, for [30], it is [200 350] L/h.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deakin, M. Smart Cities: Governing, Modeling and Analysing the Transition; Routledge: New York, NY, USA, 2014. [Google Scholar]
- Difallah, D.E.; C.-Mauroux, P.; McKenna, S.A. Scalable anomaly detection for smart city infrastructure networks. IEEE Internet Comput. 2013, 17, 39–47. [Google Scholar] [CrossRef]
- Mizuki, F.; Mikawa, K.; Kurisu, H. Intelligent water system for smart cities. Hitachi Rev. 2012, 61, 147–150. [Google Scholar]
- Lallana, C. Indicator Fact Sheet: (WQ06) Water Use Efficiency (in Cities): Leakage. European Environment Agency. 2003. Available online: https://www.eea.europa.eu/data-and-maps/indicators/water-use-efficiency-in-cities-leakage/water-use-efficiency-in-cities-leakage (accessed on 8 August 2017).
- Cardell-Oliver, R. Discovering water use activities for smart metering. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 13 June 2013. [Google Scholar]
- Hsia, S.C.; Hsu, S.W.; Chang, Y.J. Remote monitoring and smart sensing for water meter system and leakage detection. IET Wirel. Sensor Syst. 2012, 2, 402–408. [Google Scholar] [CrossRef]
- Griffin, R. The Essex trials (remote water metering). In Proceedings of the IEE Colloquium on Low Power Radio and Metering, London, UK, 6 August 2002. [Google Scholar]
- Stewart, R.A.; Willis, R.; Giurco, D.; Panuwatwanich, K.; Capati, G. Web-based knowledge management system: Linking smart metering to the future of urban water planning. Aust. Planner 2010, 47, 66–74. [Google Scholar] [CrossRef]
- Willis, R.M.; Stewart, R.A.; Panuwatwanich, K.; Jones, S.; Kyriakides, A. Alarming visual display monitors affecting shower end use water and energy conservation in Australian residential households. Resour. Conserv. Recycl. 2010, 54, 1117–1127. [Google Scholar] [CrossRef] [Green Version]
- Hauber-Davidson, G.; Idris, E. Integrated Water Meter Management; IWA Publishing: London, UK, 2006. [Google Scholar]
- Hauber-Davidson, G.; Idris, E. Smart water metering. Water 2006, 33, 38–41. [Google Scholar]
- Lee, Y.W.; Eun, S.; Oh, S.-H. Wireless digital water meter with low power consumption for automatic meter reading. In Proceedings of the 2008 International Conference on Convergence and Hybrid Information Technology, Daejeon, Korea, 28–30 August 2008. [Google Scholar]
- Cushing, V. Electromagnetic water current meter. In Proceedings of the OCEANS ’76, Washington, DC, USA, 13–15 Septmber 1976. [Google Scholar]
- Wright, P.H. The Coanda meter-a fluidic digital gas flowmeter. J. Phys. E Sci. Instrum. 1980, 13, 433. [Google Scholar] [CrossRef]
- Paulsen, R.J.; Smith, C.F.; O’Rourke, D.; Wong, T.-F. Development and Evaluation of an Ultrasonic Ground Water Seepage Meter. Groundwater 2001, 39, 904–911. [Google Scholar] [CrossRef]
- Walter, D.; Mastaller, M.; Klingel, P. Accuracy of single-jet and multi-jet water meters under the influence of the filling process in intermittently operated pipe networks. Water Sci. Technol. Water Supply 2018, 18, 679–687. [Google Scholar] [CrossRef]
- The National Museum of American History. Woltmann Water Current Meter. 2017. Available online: http://americanhistory.si.edu/collections/search/object/nmah_1434230 (accessed on 8 August 2017).
- Pereira, M. Flow meters: Part 1. IEEE Instrum. Meas. Mag. 2009, 12, 18–26. [Google Scholar] [CrossRef]
- Michalski, A.; Starzynski, J.; Wincenciak, S. Optimal design of the coils of an electromagnetic flow meter. IEEE Trans. Magn. 1998, 34, 2563–2566. [Google Scholar] [CrossRef]
- Hofman, J.; Brink, D.; Breure, P.; van der Hoek, J.P. Fouling and accuracy drift of water meters. Water Sci. Technol. Water Supply 2002, 2, 129–136. [Google Scholar] [CrossRef]
- Garmabdari, R.; Shafie, S.; Hassan, W.Z.W.; Garmabdari, A. Study on the effectiveness of dual complementary Hall-effect sensors in water flow measurement for reducing magnetic disturbance. Flow Meas. Instrum. 2015, 45, 280–287. [Google Scholar] [CrossRef]
- Schneider, D. Water stats on tap. IEEE Spectr. 2015, 52, 22–23. [Google Scholar]
- Elster, V. 100 (PSM-T) Volumetric Cold Potable Water Meters: Product Specification. Available online: https://www.elster-americanmeter.com/assets/products/products_elster_files/V100_PSM_T_SML001_SpecSheet.pdf (accessed on 8 August 2017).
- Tasic, V.; Staake, T.; Stiefmeier, T.; Tiefenbeck, V.; Fleisch, E.; Tröster, G. Self-powered water meter for direct feedback. In Proceedings of the 2012 3rd IEEE International Conference on the Internet of Things, Wuxi, China, 24–26 October 2012. [Google Scholar]
- Cho, J.Y.; Choi, J.Y.; Jeong, S.W.; Ahn, J.H.; Hwang, W.S.; Yoo, H.H.; Tae, H.S. Design of hydro electromagnetic and piezoelectric energy harvesters for a smart water meter system. Sens. Actuators A 2017, 261, 261–267. [Google Scholar] [CrossRef]
- Mezzera, L.; Carminati, M.; di Mauro, M.; Turolla, A.; Tizzoni, M.; Antonelli, M. A 7-Parameter Platform for Smart and Wireless Networks Monitoring On-Line Water Quality. In Proceedings of the 2018 25th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Bordeaux, France, 9–12 December 2018. [Google Scholar]
- Heinrich, M.; Roberti, H. Auckland water use study: Monitoring of residential water end uses. In Proceedings of the New Zealand Sustainable Building Conference’10, Wellington, New Zealand, 26–28 May 2010. [Google Scholar]
- MIT App Inventor. 2016. Available online: http://appinventor.mit.edu/explore/index-2.html (accessed on 8 August 2017).
- Botha, S.; Meijsen, L.A.; Hancke, G.P.; Silva, B. Design of a water flow and usage meter. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016. [Google Scholar]
- Alrowaijeh, A.J.S.; Hajj, A.M.R. Autonomous self-powered water meter. Appl. Phys. Lett. 2018, 113, 033902. [Google Scholar] [CrossRef]
- Aqua Robur Technologies Fenix Hub. Available online: https://www.aquarobur.se (accessed on 16 September 2019).
- Becker, P.; Folkmer, B.; Goepfert, R.; Hoffmann, D.; Willmann, A.; Manoli, Y. Energy Autonomous Wireless Water Meter with Integrated Turbine Driven Energy Harvester. J. Phys. Conf. Ser. 2013, 476, 012046. [Google Scholar] [CrossRef]
- Du, J.; Yang, H.; Shen, Z.; Guo, X. Development of an inline vertical cross-flow turbine for hydropower harvesting in urban water supply pipes. Renew. Energy 2018, 127, 386–397. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Advantages | Drawbacks |
|---|---|---|
| Fully Mechanical | simple design, low cost reliable operation | narrow measurement range, reduced accuracy at low flow rates cumulative measurement only, lack of real-time information |
| Electromechanical | real-time information | requires extra protection for the electronic component reduced stability |
| Fully Electronic | high accuracy, real-time information | requires extra waterproof protection and power supply |
| Summer | Winter | |
|---|---|---|
| Average | 179 lpd | 174 lpd |
| Median | 143 lpd | 130 lpd |
| Washing machine | 21% | 24% |
| Shower | 24% | 30% |
| Toilet | 18% | 19% |
| Tap | 11% | 16% |
| Leak | 4% | 2% |
| Outdoor | 17% | 6% |
| Bathtub | 2% | 1% |
| Dishwasher | 1% | 1% |
| Misc | 0% | 1% |
| Feature | Summer | Winter |
|---|---|---|
| Bath | 11.93 | 34.8 |
| Shower | 429.6 | 261 |
| Sink | 98.5 | 92.8 |
| Laundry tub | 35.8 | 17.4 |
| Wishing Machine | 187.95 | 208.8 |
| Dishwasher | 8.95 | 8.7 |
| Toilet | 161.1 | 165.3 |
| Feature | Summer | Winter |
|---|---|---|
| Power | 32.87 W | 37.92 W |
| Energy | 30,698.5 J | 29,841 J |
| Types | Advantages | Disadvantages |
|---|---|---|
| [23] | simple design, reliable operation | customized design, external power supply |
| [24] | self-powered, light-weight | indoor use only, small pipes |
| [25] | self-powered, hybrid energy harvesting | complex design, large pipes only |
| [10] | self-powered, simple design | requires pipe holes, limited reliability |
| [31] | self-powered, IoT connectivity | requires pipe holes, large pipes only |
| [32] | self-powered, realiable operation | complex design, separate energy harvesting unit |
| This Work | self-powered, scalable design | requires water proof, customized design |
| Types | Advantages | Disadvantages |
|---|---|---|
| Mechanical Water Meter | simple design, reliable operation large measurement range | requires manual reading no AMR functionality, no remote monitoring |
| This Work | self-powered, scalable design AMR functionality real-time monitoring | requires moisture protection narrow measurement range |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.J.; Chong, P.H.J. Design and Implementation of a Self-Powered Smart Water Meter. Sensors 2019, 19, 4177. https://doi.org/10.3390/s19194177
Li XJ, Chong PHJ. Design and Implementation of a Self-Powered Smart Water Meter. Sensors. 2019; 19(19):4177. https://doi.org/10.3390/s19194177
Chicago/Turabian StyleLi, Xue Jun, and Peter Han Joo Chong. 2019. "Design and Implementation of a Self-Powered Smart Water Meter" Sensors 19, no. 19: 4177. https://doi.org/10.3390/s19194177
APA StyleLi, X. J., & Chong, P. H. J. (2019). Design and Implementation of a Self-Powered Smart Water Meter. Sensors, 19(19), 4177. https://doi.org/10.3390/s19194177