Noise Estimation for Image Sensor Based on Local Entropy and Median Absolute Deviation

Abstract
:1. Introduction
2. Image Sensor Noise Model
2.1. Additive White Gaussian Noise Model
2.2. Poisson-Gaussian Noise Model
3. Proposed Noise Estimation Algorithm
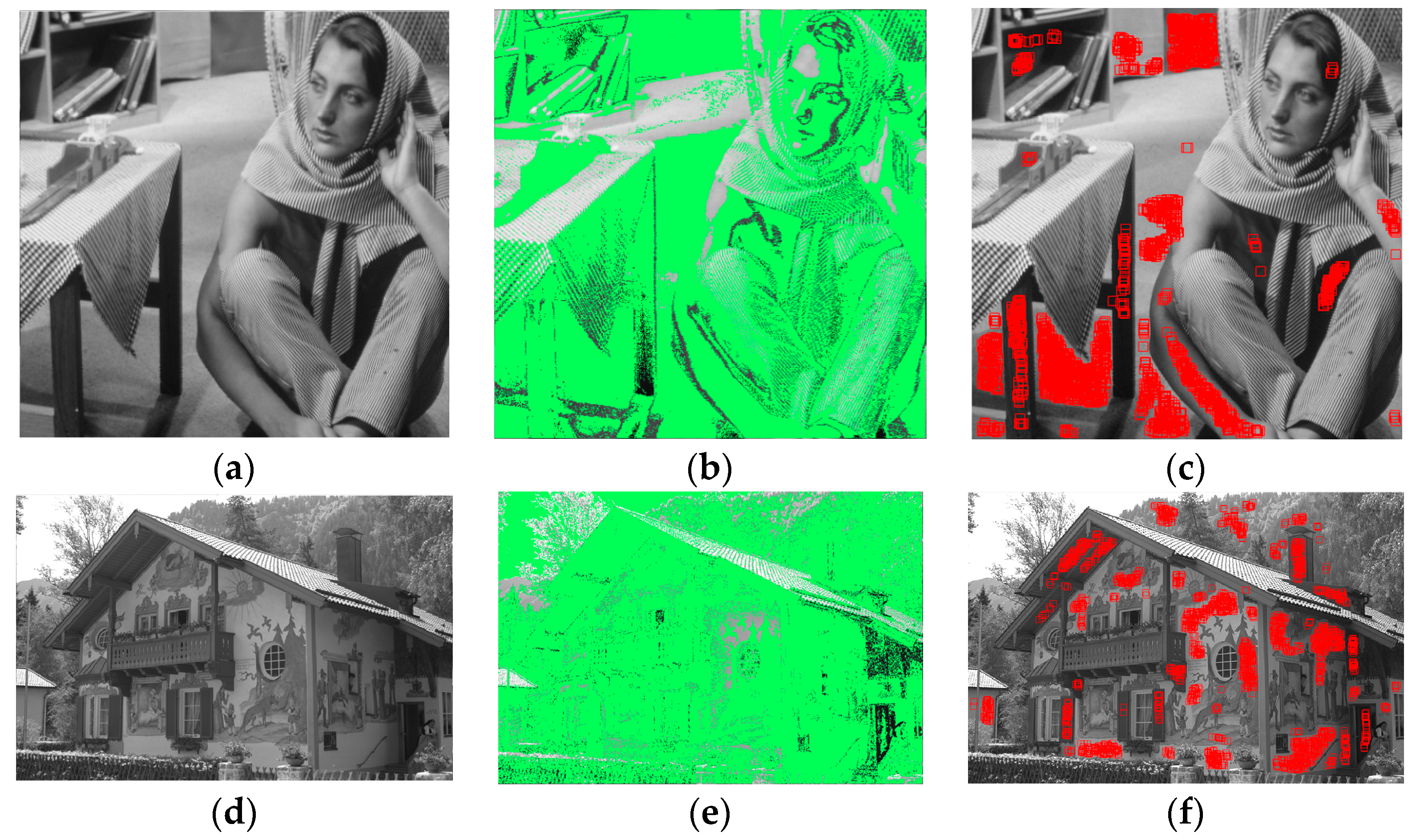
3.1. Proposed Homogenous Blocks Selection Method
3.1.1. Local Gray Statistic Entropy
3.1.2. Homogenous Blocks Selection Based on LGSE with Histogram Constraint Rule
3.2. Haar Wavelet-Based Local Median Absolute Deviation for Local Variance Estimation
3.3. Maximum Likelihood Estimation for Multi-Parameter Estimation
3.4. Proposed Noise Parameter Estimation Algorithm
3.4.1. Proposed Noise Parameter Estimation Algorithm for the AWGN Model
| Algorithm 1. Proposed noise parameter estimation algorithm for the AWGN model |
| Input: Noisy image , window size , blocks selection ratios . |
| Output: Estimated noise standard deviation . |
| Step 1: Group a set of blocks by sliding window pixel-by-pixel: |
| . |
| Step 2: Compute the mean gray value of all pixels at each block. |
| Step 3: for block index k = 1:BN do |
| Compute the LGSE of blocks according to (8) and (9). |
| end for |
| Step 4: Exclude the LGSE of blackest and whitest blocks according to (10) and (11). |
| Step 5: Select homogenous blocks based on selection of residual LGSE using (15). |
| Step 6: for homogenous block index t = 1:T do |
| Obtain the local standard deviation of homogenous block by HLMAD according to (16–18). |
| end for |
| Step 7: Estimate the noise standard deviation via using median estimator derived from (23). |
3.4.2. Proposed Noise Parameter Estimation Algorithm for the PGN Model
| Algorithm 2. Proposed noise parameter estimation algorithm for the PGN model |
| Input: Noisy image , window size , blocks selection ratios . |
| Output: Estimated NLF parameters and . |
| Step 1: Group a set of blocks by sliding window pixel-by-pixel: |
| . |
| Step 2: Compute the mean gray value of all pixels in each block. |
| Step 3: for block index k = 1:BN do |
| Compute the LGSE of blocks according to (8) and (9). |
| end for |
| Step 4: Exclude the LGSE of blackest and whitest blocks according to (10) and (11). |
| Step 5: Utilize the gray level histogram-based constraint rule to remove disorderly blocks, |
| and exclude the LGSE of low frequency gray value according to (12–14). |
| Step 6: Select homogenous blocks based on selection of residual LGSE using (15). |
| Step 7: for homogenous block index t = 1:T do |
| Compute the mean gray value of all pixels in selected block using (7). |
| Obtain the local variance of homogenous block by HLMAD according to (16–18). |
| end for |
| Step 8: Estimate the two parameters and of NLF via processing local mean-variance pair using MLE derived from (19)–(22). |
4. Experimental Results
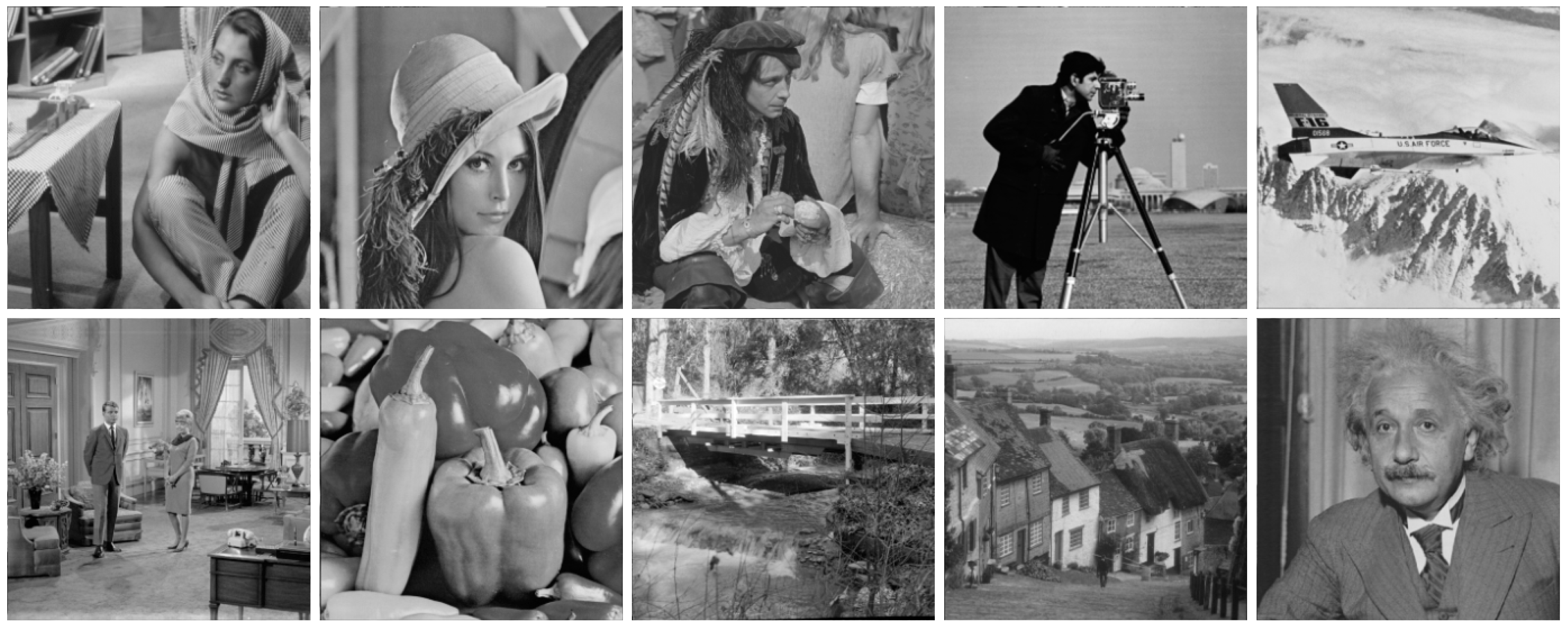
4.1. Test Dataset
4.2. Results of Noise Estimation
4.2.1. Effects of Parameters
4.2.2. Comparison to AWGN Estimation Baseline Methods
4.2.3. Comparison to PGN Estimation Baseline Methods
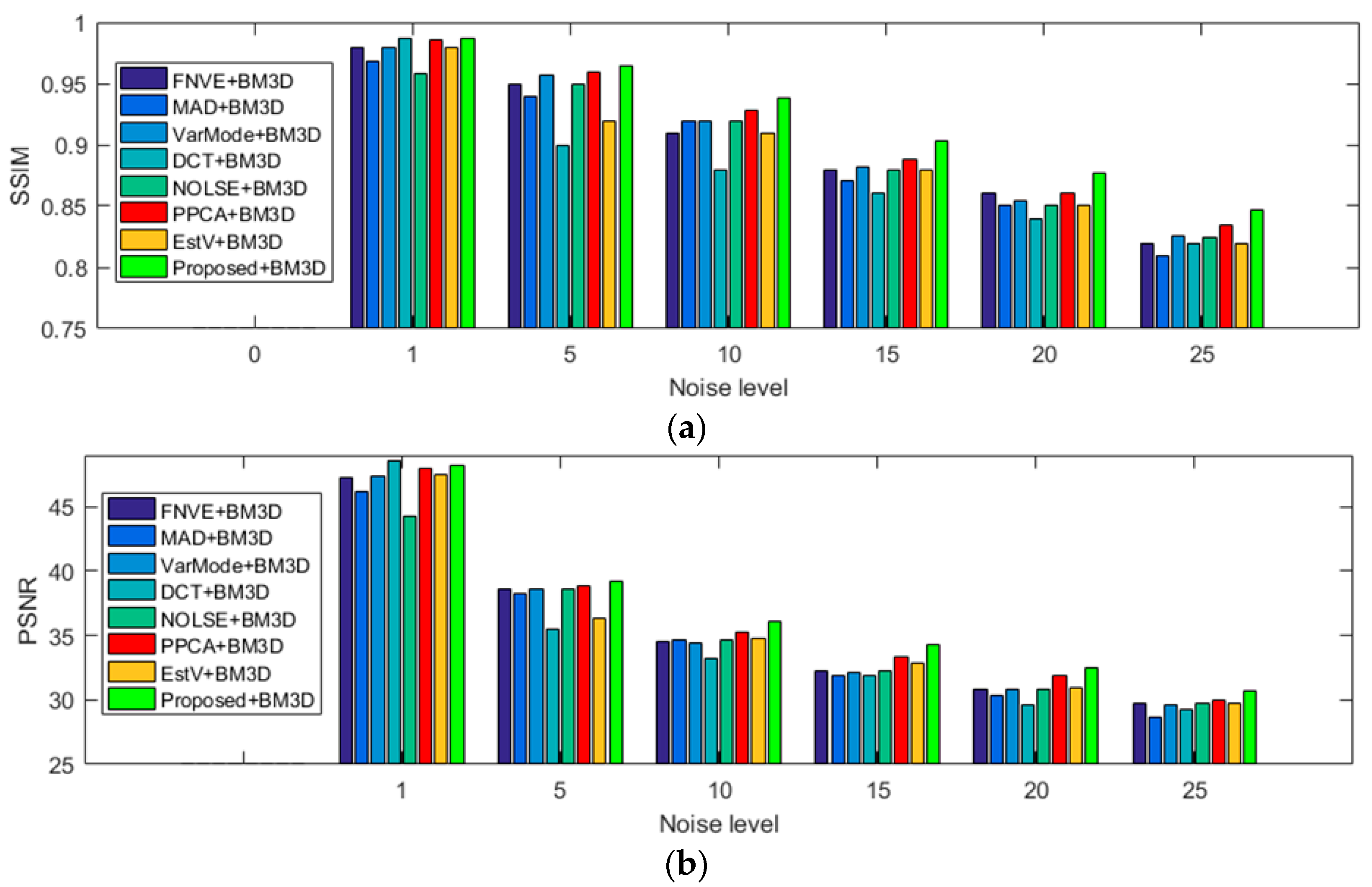
4.3. Noise Estimation Tuned for Blind De-Noising
4.3.1. Quantify the Performance of Blind De-Noising
4.3.2. Noise Estimation Tuned for AWGN Blind De-Noising
4.3.3. Noise Estimation Tuned for PGN Blind De-Noising
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Riutort-Mayol, G.; Marques-Mateu, A.; Segui, A.E.; Lerma, J.L. Grey level and noise evaluation of a Foveon X3 image sensor: A statistical and experimental approach. Sensors 2012, 12, 10339–10368. [Google Scholar] [CrossRef] [PubMed]
- Rakhshanfar, M.; Amer, M.A. Estimation of Gaussian, Poissonian-Gaussian, and Processed Visual Noise and its level function. IEEE Trans. Image Process. 2016, 25, 4172–4185. [Google Scholar] [CrossRef] [PubMed]
- Bosco, A.; Battiato, S.; Bruna, A.; Rizzo, R. Noise reduction for CFA image sensors exploiting HVS behaviour. Sensors 2009, 9, 1692–1713. [Google Scholar] [CrossRef] [PubMed]
- Reibel, Y.; Jung, M.; Bouhifd, M.; Cunin, B.; Draman, C. CCD or CMOS camera noise characterisation. Eur. Phys. J. Appl. Phys. 2002, 21, 75–80. [Google Scholar] [CrossRef]
- Irie, K.; McKinnon, A.E.; Unsworth, K.; Woodhead, I.M. A technique for evaluation of CCD video-camera noise. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 280–284. [Google Scholar] [CrossRef]
- Irie, K.; McKinnon, A.E.; Unsworth, K.; Woodhead, I.M. A model for measurement of noise in CCD digital-video cameras. Meas. Sci. Technol. 2008, 19, 045207. [Google Scholar] [CrossRef]
- Faraji, H.; MacLean, W.J. CCD noise removal in digital images. IEEE Trans. Image Process. 2006, 15, 2676–2685. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Szeliski, R.; Kang, S.B.; Zitnick, C.L.; Freeman, W.T. Automatic estimation and removal of noise from a single image. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 299–314. [Google Scholar] [CrossRef] [PubMed]
- Immerkær, J. Fast noise variance estimation. Comput. Vis. Image Underst. 1996, 64, 300–302. [Google Scholar] [CrossRef]
- Yang, S.-C.; Yang, S.M. A fast method for image noise estimation using Laplacian operator and adaptive edge detection. In Proceedings of the 3rd International Symposium on Communications, Control and Signal Processing, St Julians, Malta, 12–14 March 2008. [Google Scholar]
- Laligant, O.; Truchetet, F.; Fauvet, E. Noise estimation from digital step-model signal. IEEE Signal Process. Soc. 2013, 22, 5158–5167. [Google Scholar] [CrossRef]
- Zoran, D.; Weiss, Y. Scale invariance and noise in natural images. In Proceedings of the IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009. [Google Scholar]
- Lyu, S.; Pan, X.; Zhang, X. Exposing region splicing forgeries with blind local noise estimation. Int. J. Comput. Vis. 2014, 110, 202–221. [Google Scholar] [CrossRef]
- Dong, L.; Zhou, J.; Tang, Y.Y. Noise level estimation for natural images based on scale-invariant kurtosis and piecewise stationarity. IEEE Trans. Image Process. 2017, 26, 1017–1030. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.L.; Johnstone, I.M. Ideal spatial adaptation by wavelet shrinkage. BIOMETRIKA 1994, 81, 425–455. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef] [Green Version]
- Pyatykh, S.; Hesser, J.; Zheng, L. Image noise level estimation by principal component analysis. IEEE Trans. Image Process. 2013, 22, 687–699. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Tanaka, M.; Okutomi, M. Single-image noise level estimation for blind denoising. IEEE Trans. Image Process. 2013, 22, 5226–5237. [Google Scholar] [CrossRef]
- Yang, J.; Wu, Z.; Hou, C. In estimation of signal-dependent sensor noise via sparse representation of noise level functions. In Proceedings of the 19th IEEE International Conference on Image Processing, 30 September–3 October 2012; pp. 673–676. [Google Scholar]
- Yang, J.; Gan, Z.; Wu, Z.; Hou, C. Estimation of signal-dependent noise level function in transform domain via a sparse recovery model. IEEE Trans. Image Process. 2015, 24, 1561–1572. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.-H.; Chang, H.-H. Superpixel-based image noise variance estimation with local statistical assessment. EURASIP J. Image Video Process. 2015, 2015, 38. [Google Scholar] [CrossRef]
- Fu, P.; Li, C.; Cai, W.; Sun, Q. A spatially cohesive superpixel model for image noise level estimation. Neurocomputing 2017, 266, 420–432. [Google Scholar] [CrossRef]
- Zhu, S.C.; Wu, Y.N.; Mumford, D. Minimax entropy principle and its application to texture modeling. Neural Comput. 1997, 9, 1627–1660. [Google Scholar] [CrossRef]
- Pham, T.D. The Kolmogorov–Sinai entropy in the setting of fuzzy sets for image texture analysis and classification. Pattern Recognit. 2016, 53, 229–237. [Google Scholar] [CrossRef]
- Yin, S.; Qian, Y.; Gong, M. Unsupervised hierarchical image segmentation through fuzzy entropy maximization. Pattern Recognit. 2017, 68, 245–259. [Google Scholar] [CrossRef]
- Shakoor, M.H.; Tajeripour, F. Noise robust and rotation invariant entropy features for texture classification. Multimed. Tools Appl. 2016, 76, 8031–8066. [Google Scholar] [CrossRef]
- Asadi, H.; Seyfe, B. Signal enumeration in Gaussian and non-Gaussian noise using entropy estimation of eigenvalues. Digit. Signal Process. 2018, 78, 163–174. [Google Scholar] [CrossRef]
- Foi, A.; Trimeche, M.; Katkovnik, V.; Egiazarian, K. Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data. IEEE Trans. Image Process. 2008, 17, 1737–1754. [Google Scholar] [CrossRef] [PubMed]
- Zabrodina, V.; Abramov, S.K.; Lukin, V.V.; Astola, J.; Vozel, B.; Chehdi, K. Blind estimation of mixed noise parameters in images using robust regression curve fitting. In Proceedings of the 19th European Signal Processing Conference, Barcelona, Spain, 29 August–2 September 2011; pp. 1135–1139. [Google Scholar]
- Lee, S.; Lee, M.S.; Kang, M.G. Poisson-Gaussian noise analysis and estimation for low-dose X-ray images in the NSCT domain. Sensors 2018, 18, 1019. [Google Scholar]
- Lee, M.S.; Park, S.W.; Kang, M.G. Denoising algorithm for CFA image sensors considering inter-channel correlation. Sensors 2017, 17, 1236. [Google Scholar] [CrossRef]
- Zheng, L.; Jin, G.; Xu, W.; Qu, H.; Wu, Y. Noise Model of a Multispectral TDI CCD imaging system and its parameter estimation of piecewise weighted least square fitting. IEEE Sens. J. 2017, 17, 3656–3668. [Google Scholar] [CrossRef]
- Dong, L.; Zhou, J.; Tang, Y.Y. Effective and fast estimation for image sensor noise via constrained weighted least squares. IEEE Trans. Image Process. 2018, 27, 2715–2730. [Google Scholar] [CrossRef]
- Azzari, L.; Foi, A. Indirect estimation of signal-dependent noise with nonadaptive heterogeneous samples. IEEE Trans. Image Process. 2014, 23, 3459–3467. [Google Scholar] [CrossRef]
- Liu, X.; Tanaka, M.; Okutomi, M. Practical signal-dependent noise parameter estimation from a single noisy image. IEEE Trans. Image Process. 2014, 23, 4361–4371. [Google Scholar] [CrossRef] [PubMed]
- Bruhn, J.; Lehmann, L.E.; Röpcke, H.; Bouillon, T.W.; Hoeft, A. Shannon entropy applied to the measurement of the electroencephalographic effects of desflurane. Am. Soc. Anesthesiol. 2001, 95, 30–35. [Google Scholar] [CrossRef]
- Standard Kodak PCD0992 Test Images. Available online: http://r0k.us/graphics/kodak/ (accessed on 6 March 2018).
- Martin, D.R.; Fowlkes, C.; Tal, D.; Malik, J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proceedings of the 9th International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001. [Google Scholar]
- Khalil, H.H.; Rahmat, R.O.K.; Mahmoud, W.A. Estimation of noise in gray-scale and colored images using median absolute deviation (MAD). In Proceedings of the 3rd International Conference on Geometric Modeling and Imaging, London, UK, 9–11 July 2008; pp. 92–97. [Google Scholar]
- Aja-Fernández, S.; Vegas-Sánchez-Ferrero, G.; Martín-Fernández, M.; Alberola-López, C. Automatic noise estimation in images using local statistics. Additive and multiplicative cases. Image Vis. Comput. 2009, 27, 756–770. [Google Scholar] [CrossRef]
- Jeong, B.G.; Kim, B.C.; Moon, Y.H.; Eom, I.K. Simplified noise model parameter estimation for signal-dependent noise. Signal Process. 2014, 96, 266–273. [Google Scholar] [CrossRef]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Makitalo, M.; Foi, A. Optimal inversion of the generalized Anscombe transformation for Poisson-Gaussian noise. IEEE Trans. Image Process. 2013, 22, 91–103. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ground Truth | Immerkær’s FNVE | Khalil’s MAD | Santiago’s VarMode | Zoran’s DCT | Olivier’s NOLSE | Pyatykh’s PPCA | Lyu’s EstV | Our Proposed |
|---|---|---|---|---|---|---|---|---|
| 3.31 | 3.03 | 2.52 | 1.41 | 3.92 | 1.29 | 1.39 | 1.77 | |
| 3.57 | 3.25 | 2.91 | 1.70 | 4.05 | 1.72 | 1.65 | 1.91 | |
| 6.40 | 6.34 | 6.23 | 5.02 | 6.406 | 5.48 | 5.10 | 5.34 | |
| 10.92 | 10.99 | 10.94 | 9.64 | 10.70 | 10.31 | 9.87 | 10.13 | |
| 15.72 | 15.80 | 15.81 | 14.39 | 15.42 | 15.25 | 14.74 | 15.11 | |
| 20.59 | 20.67 | 20.56 | 19.21 | 20.27 | 20.13 | 19.57 | 19.88 | |
| 25.57 | 25.60 | 25.58 | 24.12 | 25.22 | 25.11 | 24.42 | 25.01 |
| Ground Truth | Immerkær’s FNVE | Khalil’s MAD | Santiago’s VarMode | Zoran’s DCT | Olivier’s NOLSE | Pyatykh’s PPCA | Lyu’s EstV | Our Proposed |
|---|---|---|---|---|---|---|---|---|
| 3.43 | 3.16 | 2.67 | 1.32 | 3.96 | 1.32 | 1.48 | 1.18 | |
| 3.58 | 3.13 | 2.50 | 1.34 | 4.53 | 1.45 | 1.43 | 1.75 | |
| 6.47 | 6.49 | 5.75 | 4.53 | 6.67 | 5.21 | 4.39 | 5.14 | |
| 11.01 | 11.18 | 10.69 | 9.51 | 10.88 | 10.08 | 9.57 | 10.11 | |
| 15.79 | 16.00 | 15.61 | 14.37 | 15.56 | 15.15 | 14.56 | 15.10 | |
| 20.67 | 20.85 | 20.64 | 19.23 | 20.38 | 19.87 | 19.51 | 20.04 | |
| 25.61 | 25.74 | 25.59 | 24.12 | 25.30 | 24.89 | 24.44 | 25.00 |
| Ground Truth | Immerkær’s FNVE | Khalil’s MAD | Santiago’s VarMode | Zoran’s DCT | Olivier’s NOLSE | Pyatykh’s PPCA | Lyu’s EstV | Our Proposed |
|---|---|---|---|---|---|---|---|---|
| 3.12 | 2.37 | 1.56 | 0.58 | 4.40 | 0.78 | 1.75 | 0.66 | |
| 3.49 | 2.86 | 2.05 | 0.94 | 4.49 | 1.32 | 1.77 | 1.37 | |
| 6.51 | 6.49 | 5.86 | 4.55 | 6.62 | 5.31 | 4.49 | 5.19 | |
| 11.06 | 11.21 | 10.63 | 9.37 | 10.83 | 10.29 | 9.47 | 10.17 | |
| 15.85 | 16.03 | 15.75 | 14.26 | 15.50 | 15.18 | 14.42 | 15.05 | |
| 20.74 | 20.85 | 20.54 | 19.19 | 20.34 | 20.15 | 19.33 | 19.98 | |
| 25.70 | 25.77 | 25.66 | 24.18 | 25.26 | 25.09 | 24.21 | 24.96 |
| Ground Truth | Foi’s CPG | Zabrodina’s RCF | Jeong’s SPGN | Liu’s LPCA | Our Proposed |
|---|---|---|---|---|---|
| 0.136 | 0.124 | 0.126 | 0.108 | 0.091 | |
| 0.02 | 2.14 | 0.35 | 0.03 | 1.18 | |
| 0.131 | 0.135 | 0.130 | 0.052 | 0.088 | |
| 5.36 | 7.73 | 5.42 | 5.98 | 5.32 | |
| 0.142 | 0.159 | 0.136 | 0.064 | 0.073 | |
| 10.61 | 14.52 | 9.81 | 10.62 | 10.16 | |
| 0.518 | 0.612 | 0.607 | 0.456 | 0.481 | |
| 1.25 | 2.67 | 1.63 | 1.35 | 1.24 | |
| 0.521 | 0.618 | 0.587 | 0.479 | 0.462 | |
| 5.44 | 7.09 | 6.00 | 5.18 | 5.21 | |
| 0.522 | 0.601 | 0.561 | 0.525 | 0.517 | |
| 10.86 | 13.65 | 10.53 | 8.97 | 9.61 |
| Ground Truth | Foi’s CPG | Zabrodina’s RCF | Jeong’s SPGN | Liu’s LPCA | Our Proposed |
|---|---|---|---|---|---|
| 0.157 | 0.143 | 0.146 | 0.061 | 0.076 | |
| 0.01 | 1.72 | 1.57 | 1.50 | 1.35 | |
| 0.145 | 0.183 | 0.158 | 0.123 | 0.081 | |
| 5.63 | 6.22 | 4.69 | 5.65 | 5.66 | |
| 0.142 | 0.182 | 0.166 | 0.121 | 0.079 | |
| 10.50 | 10.54 | 10.89 | 9.33 | 10.06 | |
| 0.538 | 0.661 | 0.596 | 0.470 | 0.479 | |
| 1.23 | 1.63 | 1.31 | 1.26 | 1.27 | |
| 0.547 | 0.627 | 0.558 | 0.481 | 0.482 | |
| 5.25 | 5.98 | 5.71 | 5.34 | 5.13 | |
| 0.534 | 0.607 | 0.572 | 0.533 | 0.526 | |
| 10.91 | 10.86 | 9.22 | 9.16 | 9.54 |
| Ground Truth | Foi’s CPG | Zabrodina’s RCF | Jeong’s SPGN | Liu’s LPCA | Our Proposed |
|---|---|---|---|---|---|
| 0.127 | 0.138 | 0.136 | 0.092 | 0.086 | |
| 0.20 | 1.50 | 0.27 | 0.08 | 1.39 | |
| 0.137 | 0.146 | 0.143 | 0.082 | 0.083 | |
| 4.63 | 6.01 | 5.46 | 6.03 | 5.95 | |
| 0.139 | 0.167 | 0.157 | 0.071 | 0.065 | |
| 9.75 | 10.32 | 10.88 | 10.16 | 10.18 | |
| 0.514 | 0.652 | 0.583 | 0.486 | 0.481 | |
| 1.13 | 1.83 | 1.42 | 1.13 | 1.04 | |
| 0.516 | 0.639 | 0.565 | 0.472 | 0.485 | |
| 5.18 | 5.72 | 5.23 | 5.12 | 5.11 | |
| 0.521 | 0.618 | 0.593 | 0.509 | 0.491 | |
| 10.22 | 10.49 | 8.64 | 9.62 | 9.73 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, Z.; Wei, K.; Xiong, W.; Yu, J.; Qi, B. Noise Estimation for Image Sensor Based on Local Entropy and Median Absolute Deviation. Sensors 2019, 19, 339. https://doi.org/10.3390/s19020339
Li Y, Li Z, Wei K, Xiong W, Yu J, Qi B. Noise Estimation for Image Sensor Based on Local Entropy and Median Absolute Deviation. Sensors. 2019; 19(2):339. https://doi.org/10.3390/s19020339
Chicago/Turabian StyleLi, Yongsong, Zhengzhou Li, Kai Wei, Weiqi Xiong, Jiangpeng Yu, and Bo Qi. 2019. "Noise Estimation for Image Sensor Based on Local Entropy and Median Absolute Deviation" Sensors 19, no. 2: 339. https://doi.org/10.3390/s19020339
APA StyleLi, Y., Li, Z., Wei, K., Xiong, W., Yu, J., & Qi, B. (2019). Noise Estimation for Image Sensor Based on Local Entropy and Median Absolute Deviation. Sensors, 19(2), 339. https://doi.org/10.3390/s19020339