4.3. Results and Discussion
To validate the proposed method, extraction results for the road edge were quantified using the parameters shown in
Table 1. During the optimum parameter selection process, three factors were considered: 1) Density; 2) the road structure type (i.e., the parameter for parameters with different road structures is different); and 3) the actual road scene, such as vehicle occlusion. The proposed method was calculated using a computer with 8 GB of RAM and an intel(R) Core (TM)i7-8550U CPU @1.80GHz running the VS2010 C/C++ language.
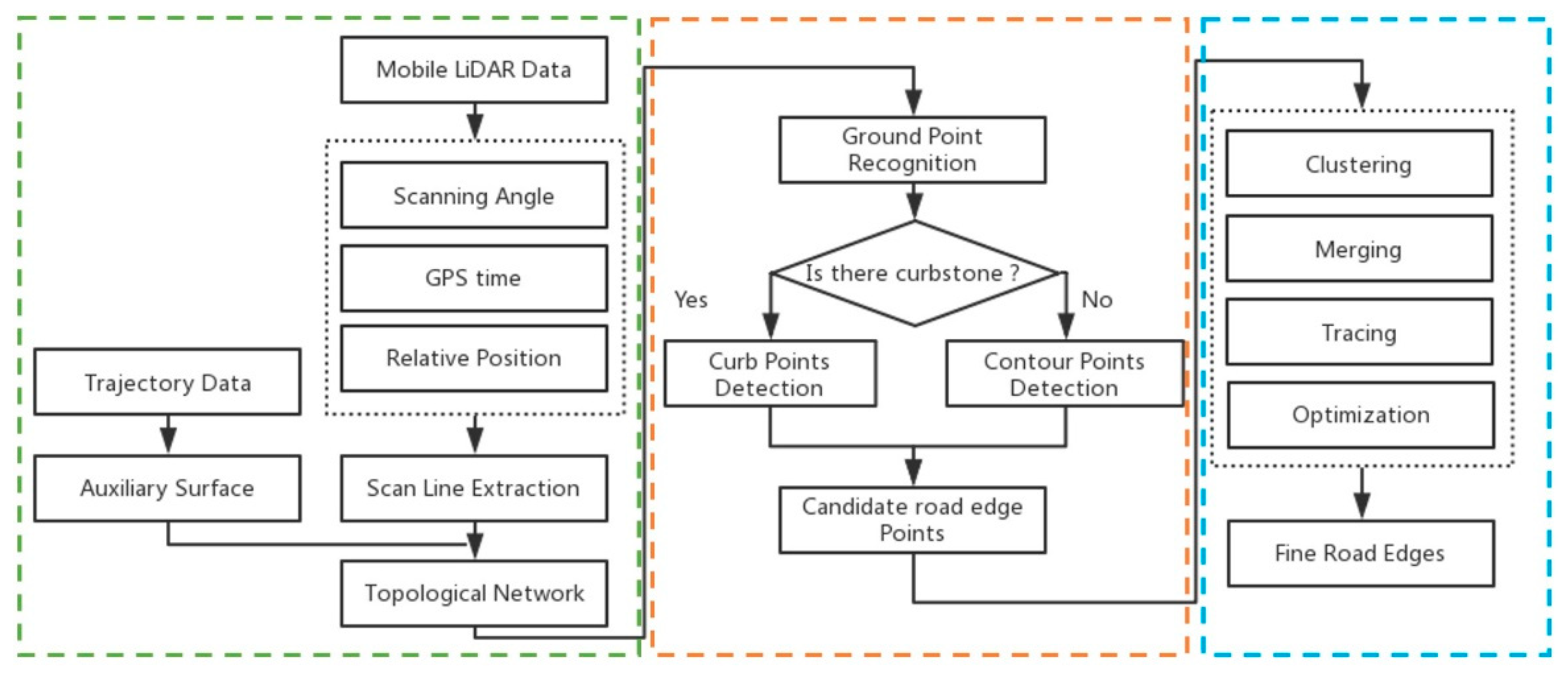
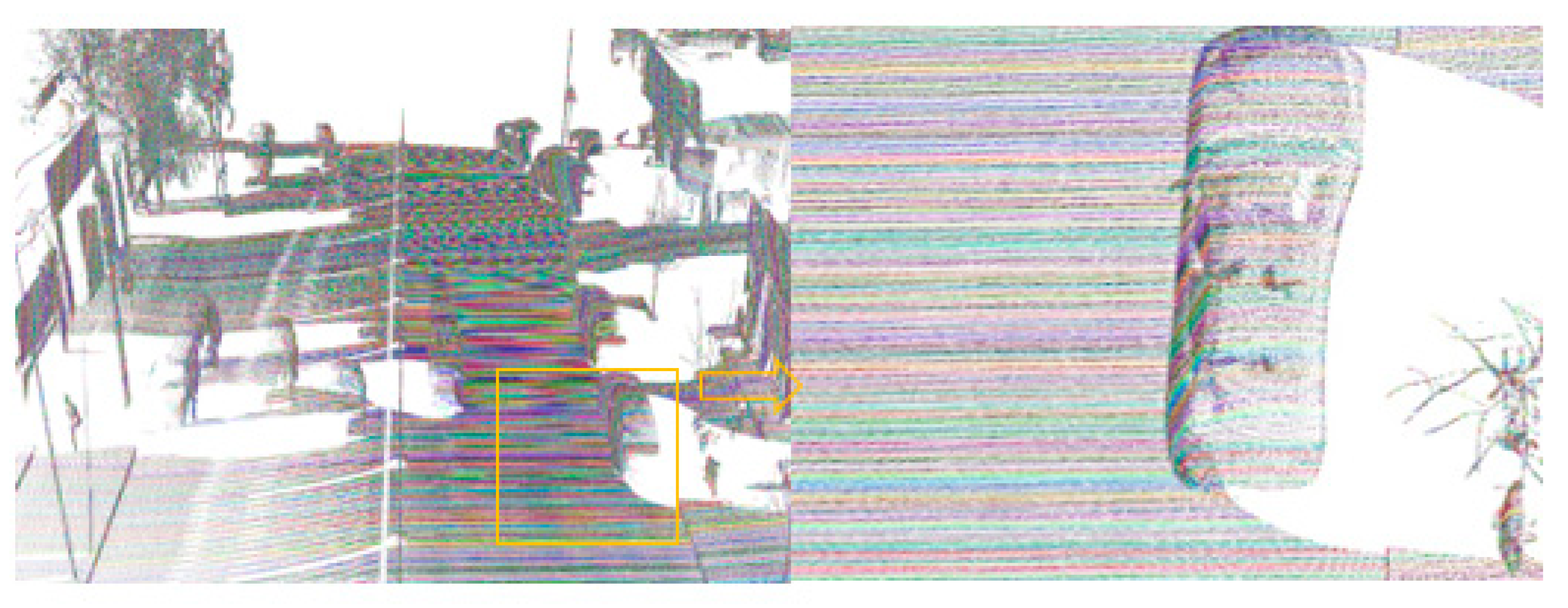
Extraction of the scan line is based on differences in the angles of laser points. The scan angle range of each scan line for these five datasets was 60°–320°, the threshold of ∆θ is 100°. The extraction result of scan lines is shown in
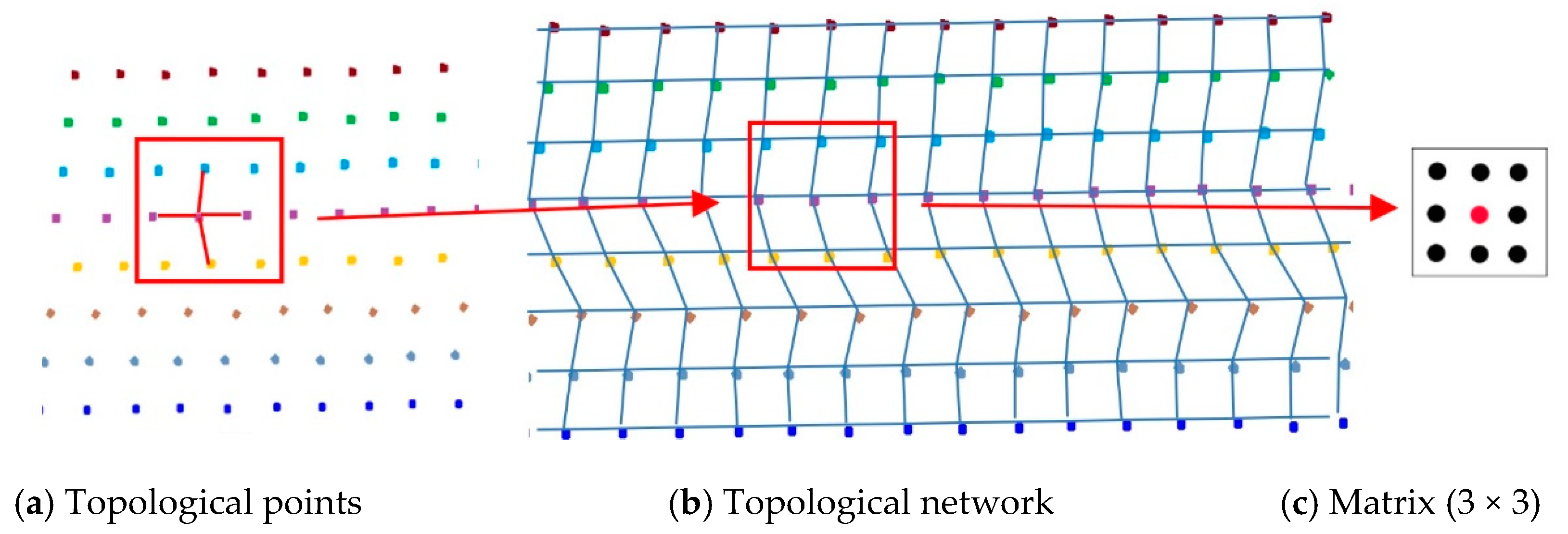
Figure 9. The topological network was constructed based on scan lines.
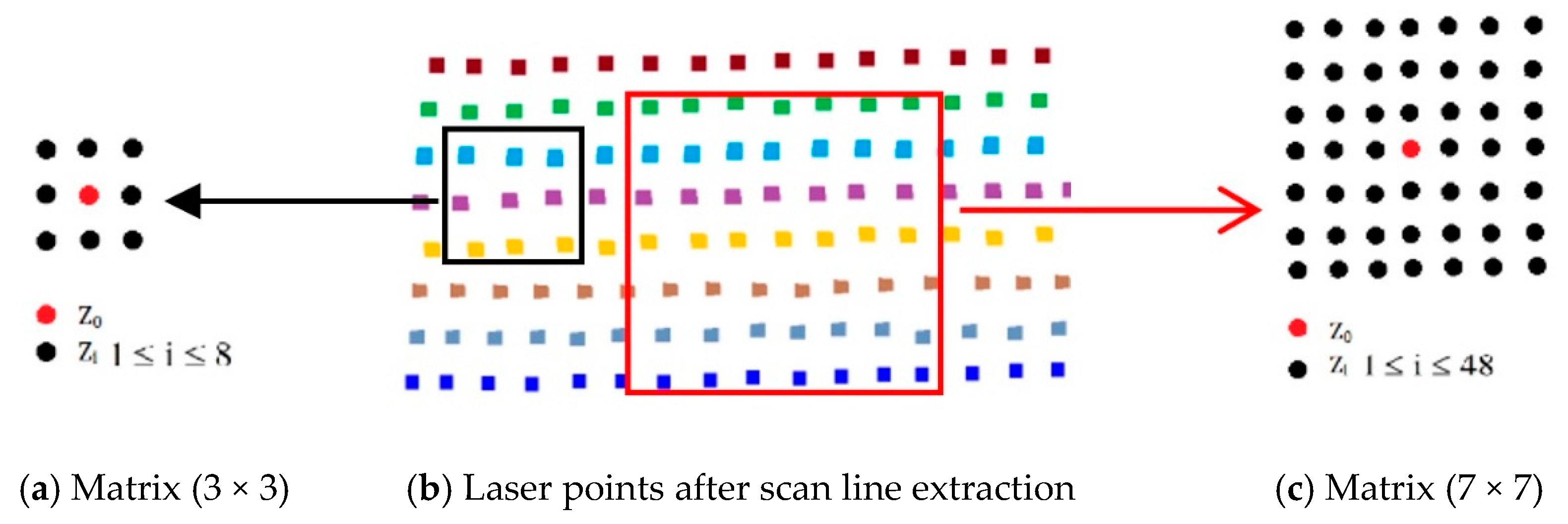
In the extraction process, the extraction of ground points involves two critical thresholds (Δz1 and Δz2) based on the moving window (3 × 3). Similarly, extraction of road curb points also has two critical thresholds (Δd and Δz3) based on the moving window. Emphasis is placed on the critical thresholds in the following discussion. The detailed relationships between the thresholds and the extraction results are shown in
Table 2 and
Table 3, using the arc curb identified by box A in
Figure 8a as an example. To further investigate the relationship between thresholds (Δz1 and Δz2) and extracted ground results, a height amplification factor of 10 was used to amplify the details of the extraction results (
Table 2).
As shown in
Table 2, when Δz2 remains constant, Δz1 continues to increase. This increases the density of the extracted ground points, and the range of ground points grows on both sides of the road. More specifically, when Δz2 is 0.2 and Δz1 is 0.01, the extraction result is a flat set of laser points, with uneven road surface points having been excluded. When Δz2 is 0.2 and Δz1 is 0.1, the extraction result contains uneven road surface points. These trends occur because the threshold of Δz1 is related to the roughness of the extracted surface, and Δz2 defines the maximum elevation plane to restrict the extraction result. The relationship between the extraction results and thresholds for curb points is shown in
Table 3.
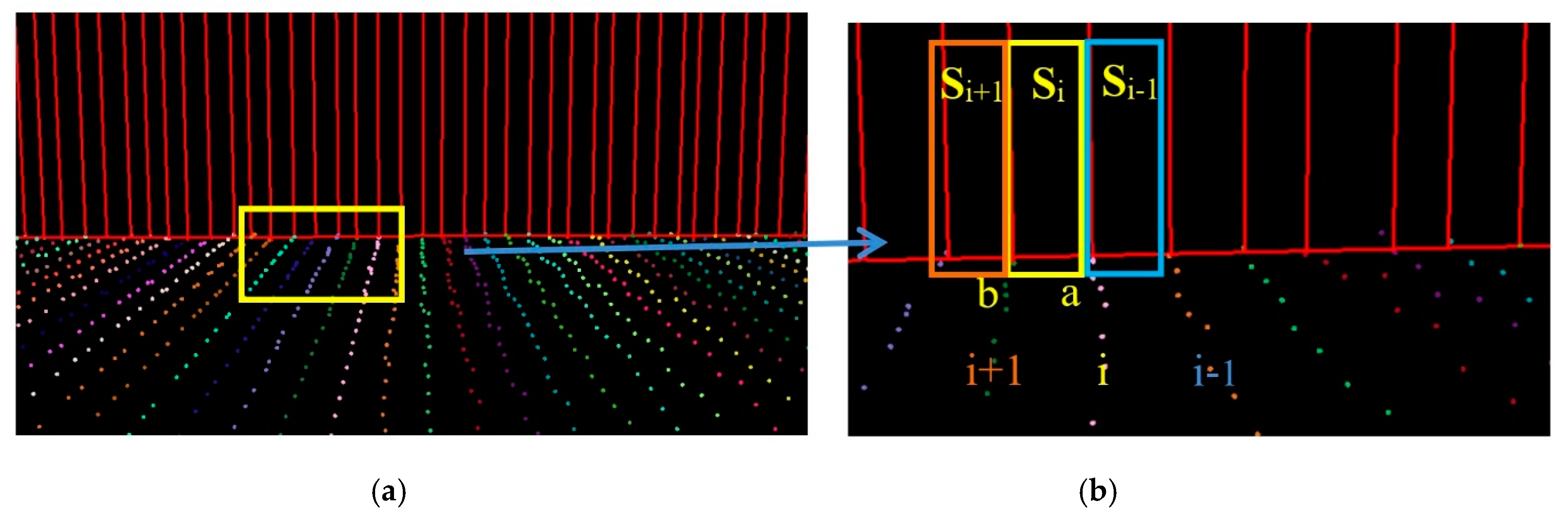
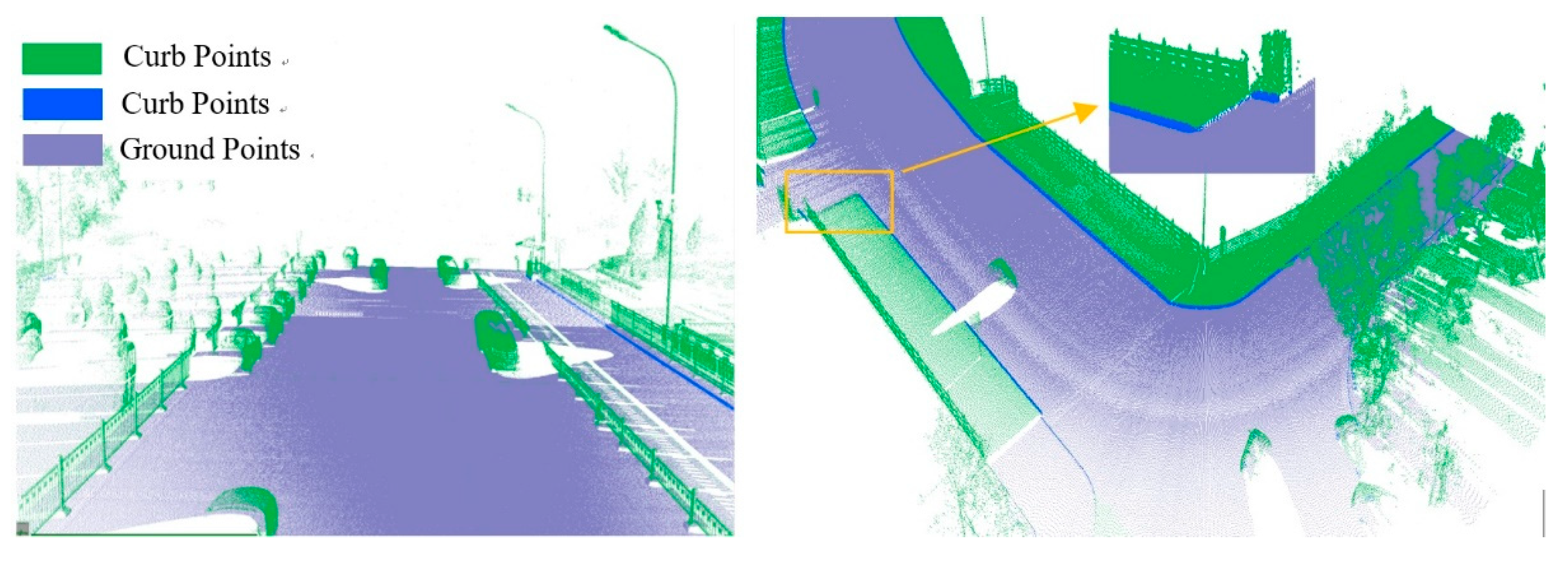
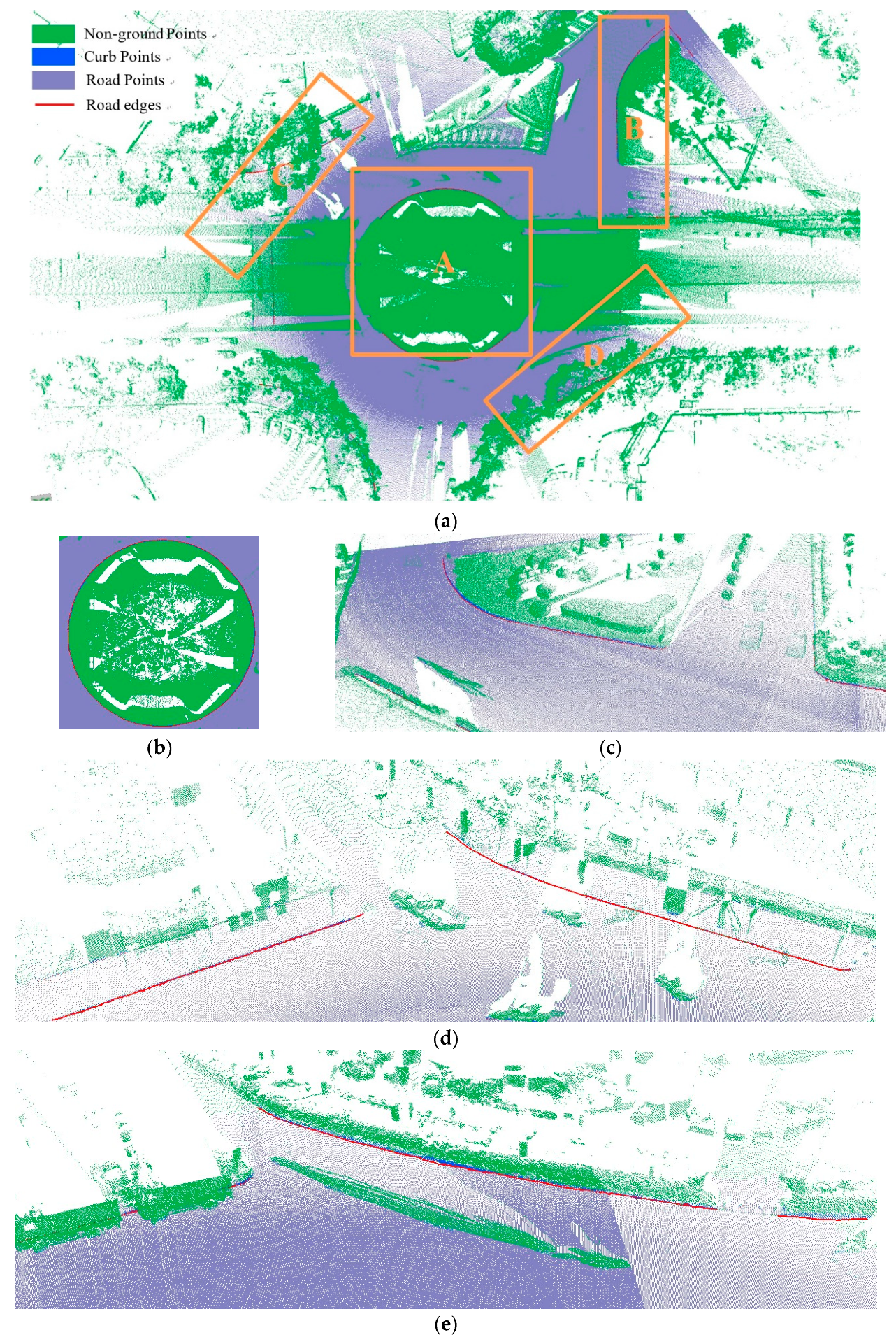
The threshold of Δd has a function similar to the threshold Δz1, and Δz3 is similar to the ground extraction threshold Δz2. The parameter Δd is related to the roughness of the extracted curbstone surface, and Δz3 is used to define the elevation range to restrict the extraction of curb points. The extraction result of the curb points for the structural road type when Δd and Δz3 are 0.3 and 0.1, respectively, is shown in
Figure 10, which is another dataset with many cars and curved curbs. More specifically, the extraction results of Samples A, B, C, and D in
Figure 10a are shown in
Figure 10b–e, respectively. According to
Figure 10, there were five road entrances and occlusions (mainly due to moving cars), which is challenging for road edge extraction. Moreover, the road corners were the main components of the region. Based on our proposed method, we nonetheless obtained better experimental results.
To further verify the extraction results for structured roads, three types of road curbs and three regions within the experimental suburban area were selected. These areas, each of which has a unique type of road curve, are, respectively, denoted by boxes D, E, and F in
Figure 8a. Extraction results for each of the three types of road curbstones are shown in
Table 4 for each region. Results display ground and curb points, road edges, the overlap map, and the local effects. The data suggest that ground points, curb points, and road edges were well extracted.
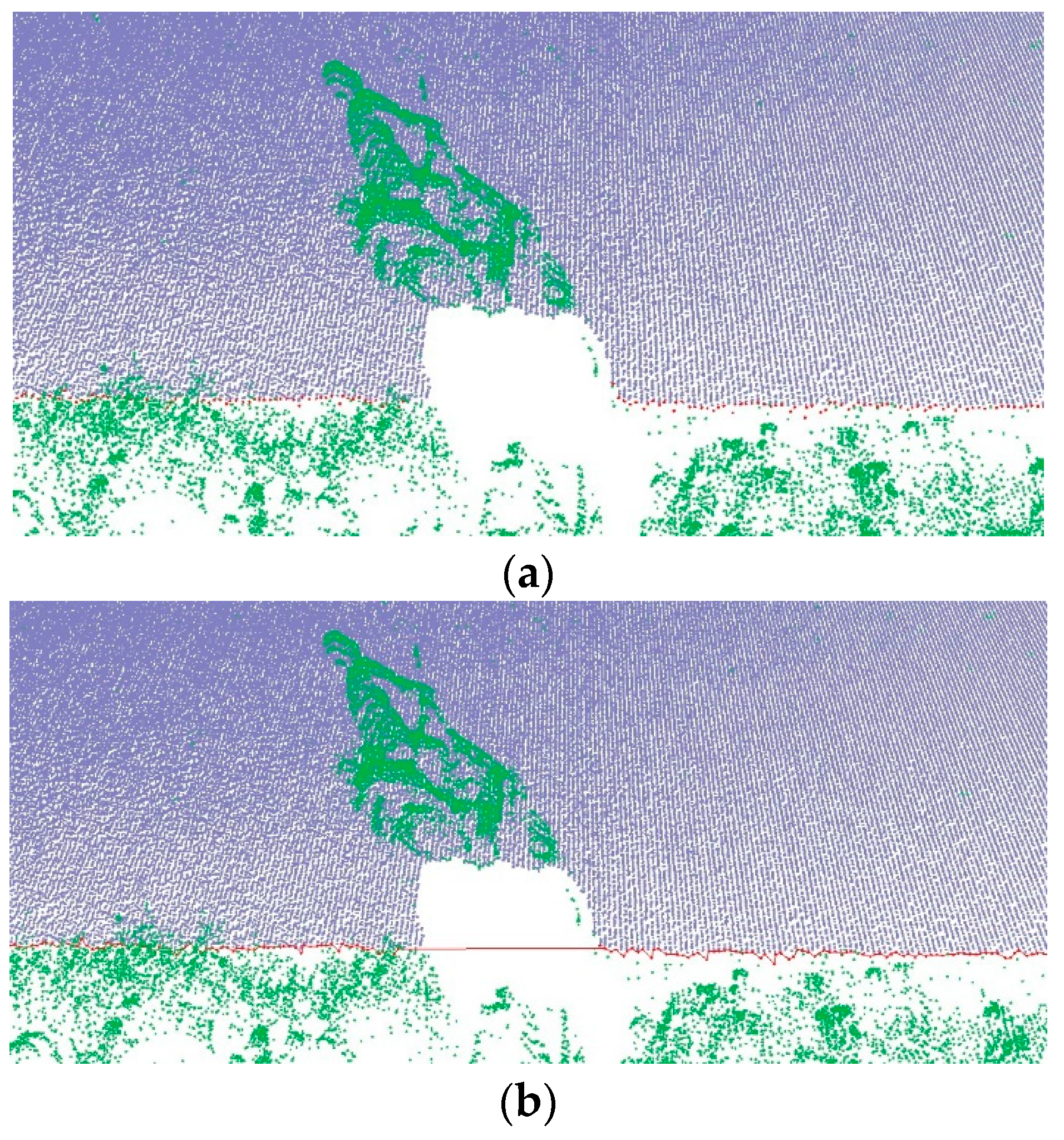
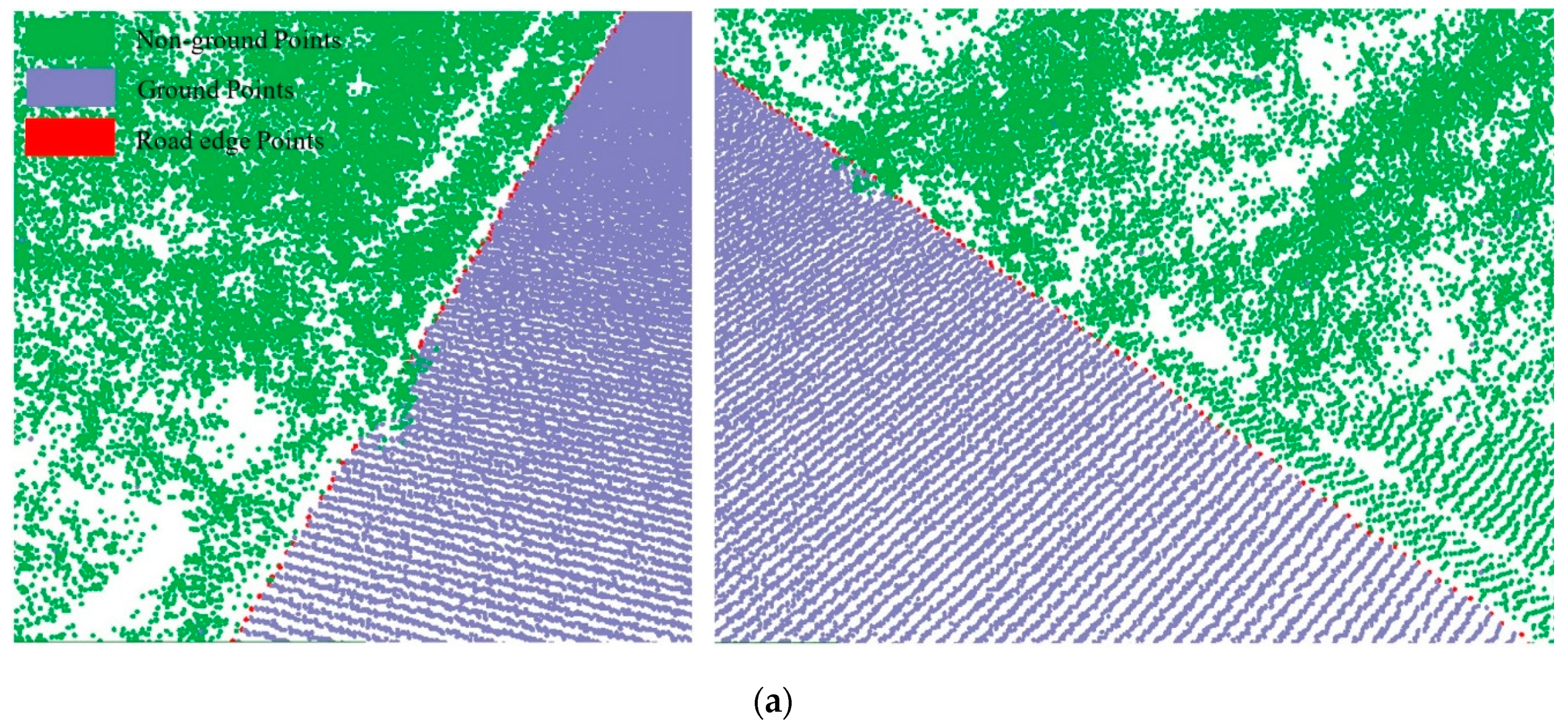
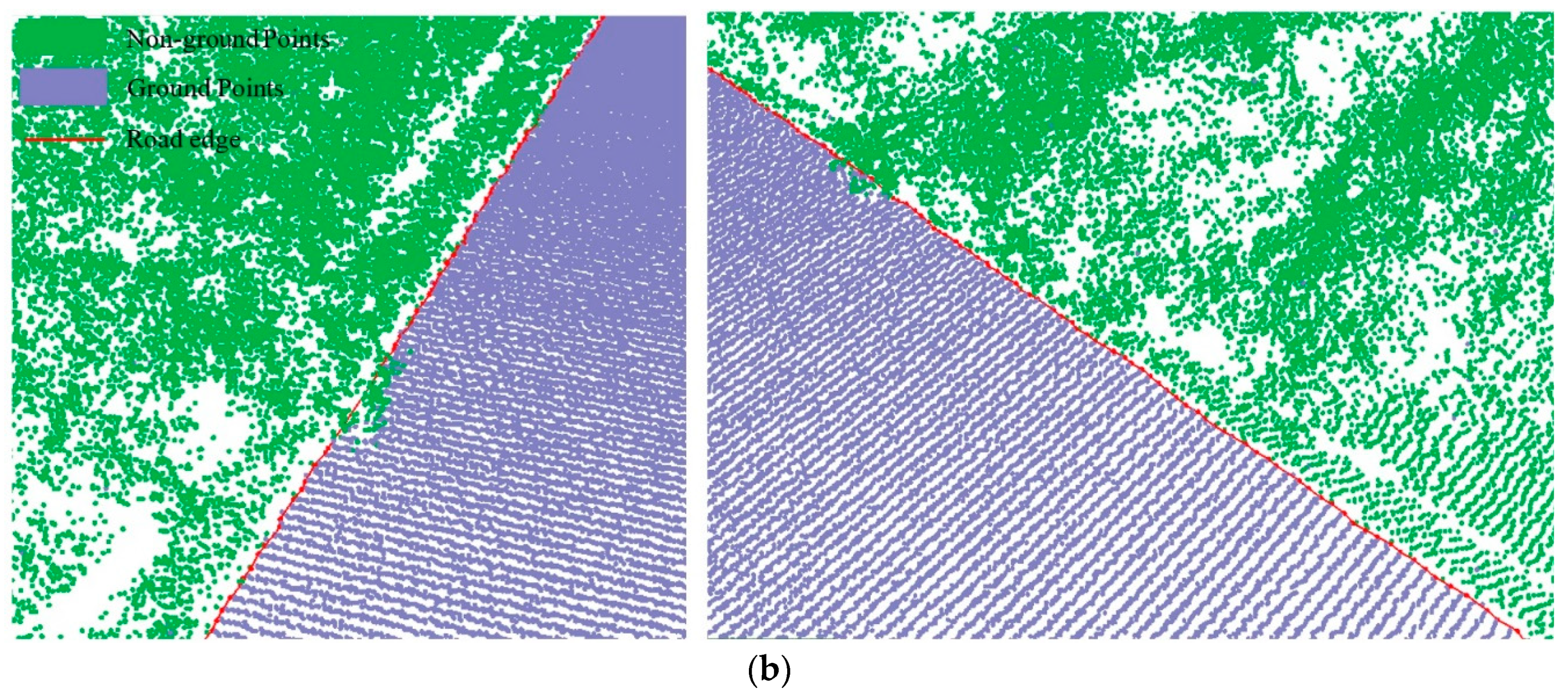
For the non-structural road, we successfully extracted ground points because the roughness of the road surface was significantly different to that of the roadsides. Extraction results for a non-structural curb are illustrated in
Figure 11 and marked by box C in
Figure 8c. The extraction results for the ground points are shown in
Figure 11a, and the road edges are shown in
Figure 11b. The results confirm that the method successfully extracted ground points and the road edge for a non-structural road type.
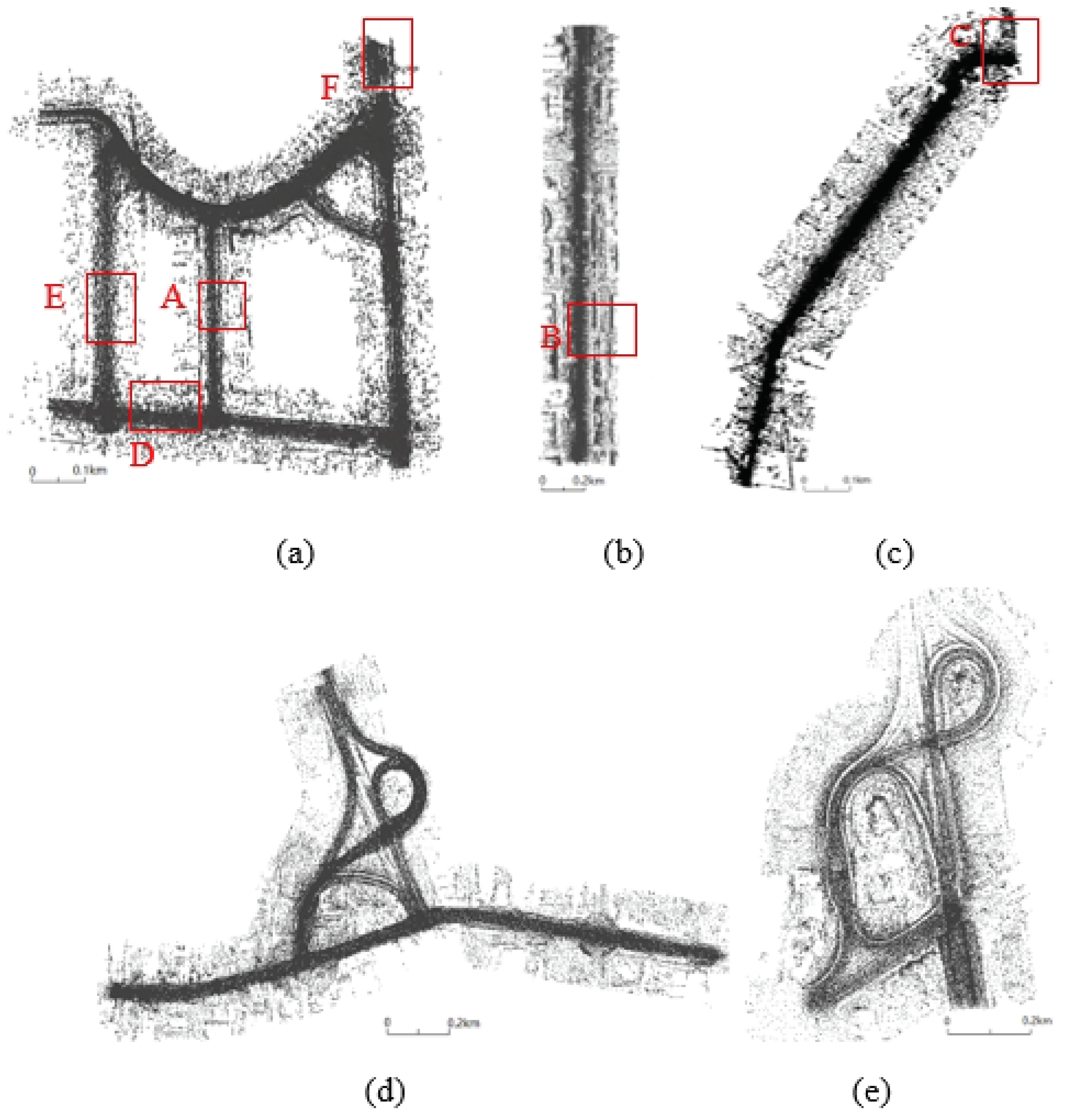
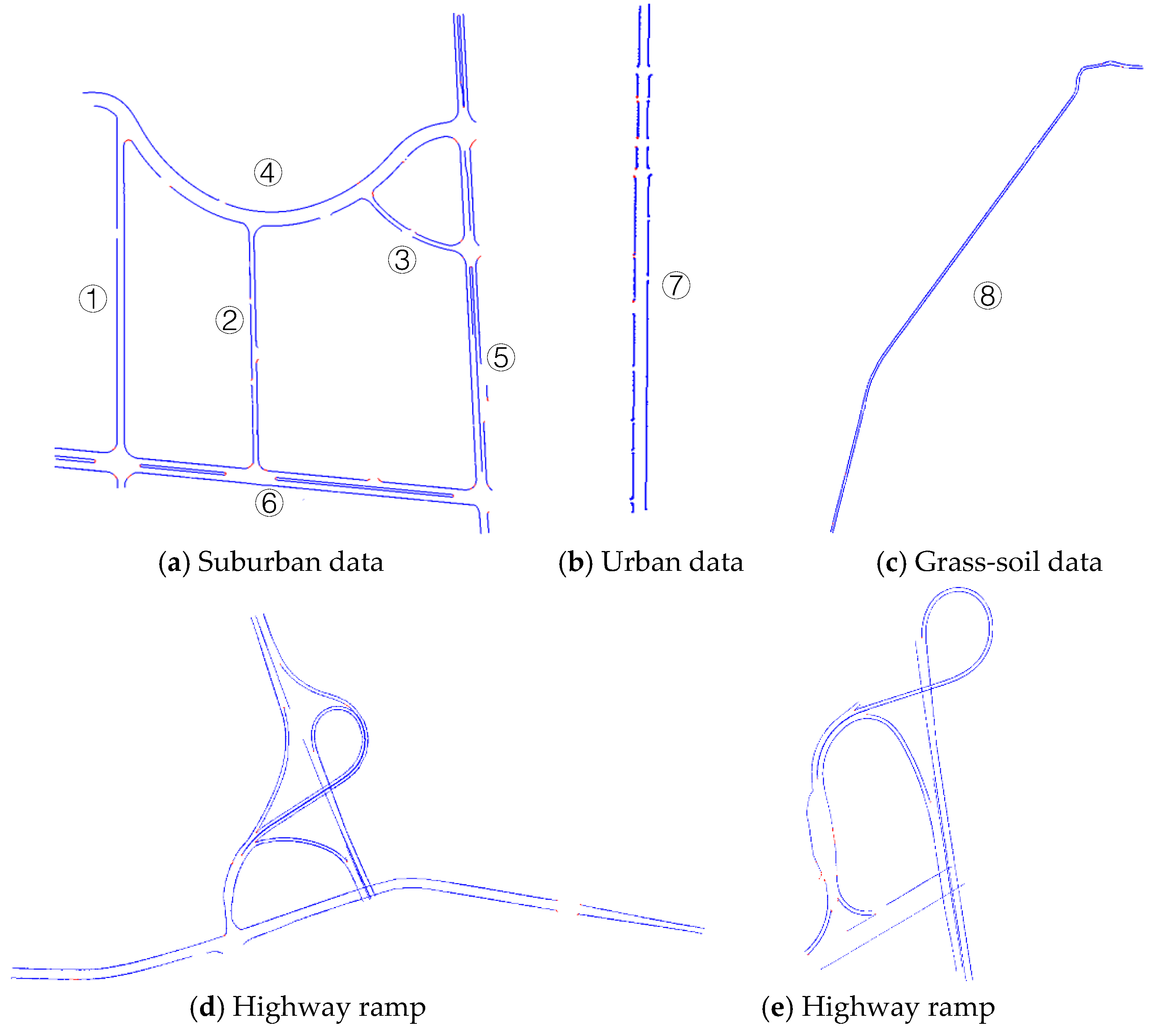
The road edges extracted from these experimental datasets based on the proposed method are shown in
Figure 12. Thresholds in the process of road edge extraction are shown in
Table 1 for all experimental datasets.
Figure 12a shows the extraction results for suburban roads using the proposed method. Non-extracted edges occur at locations with large turn angles.
Figure 12b presents the extraction results from the urban dataset, and
Figure 12c shows extraction results for the road edge in a rural non-structural grass–soil road.
Figure 12d,e shows the extraction results for the road edge of the highway ramp.
The proposed road edge extraction method successfully extracted edges for both sides of the road for all datasets. The completeness, correctness, and quality of results were computed using Equations (7)–(9), respectively, to validate the road boundary extraction results. The assessment results are based on the buffer zone of the manually defined road edge (i.e., a 0.1 m buffer width). The detailed completeness, correctness, and quality results, together with related thresholds for the larger-scale experimental dataset (
Figure 12), are listed in
Table 5. Among the results, road 1–4, 7, and 8 show the results of each side of the road. Road 5 and 6 not only show the result of each edge, but also contain the edge result of the road median. Ramp (d) and (e) show the unified evaluation of the whole road.
Assessment results based on
Table 5 show that the correctness of the extraction results for the structural suburban and urban road data using the proposed method were greater than 97.7%, completeness results were greater than 91.7%, and the quality measure values were greater than 90.9%. Correctness for the non-structural rural road was greater than 95.5%, completeness was greater than 96.2%, and the quality measure value was greater than 94.1%.
A comparison of the assessment results with the previously developed methods [
2] based on the validation method described previously (see
Section 4.2) is listed in
Table 6. For the structural road data (i.e., suburban and urban data), the correctness, completeness, and quality of the assessment results were higher than those obtained using the previous method [
2], except for the completeness of suburban data. For the urban data, in particular, which had complex road conditions (i.e., many obstructions from cars, pedestrians, and fences), the assessment results based on our proposed method were much better than those obtained by the previous method [
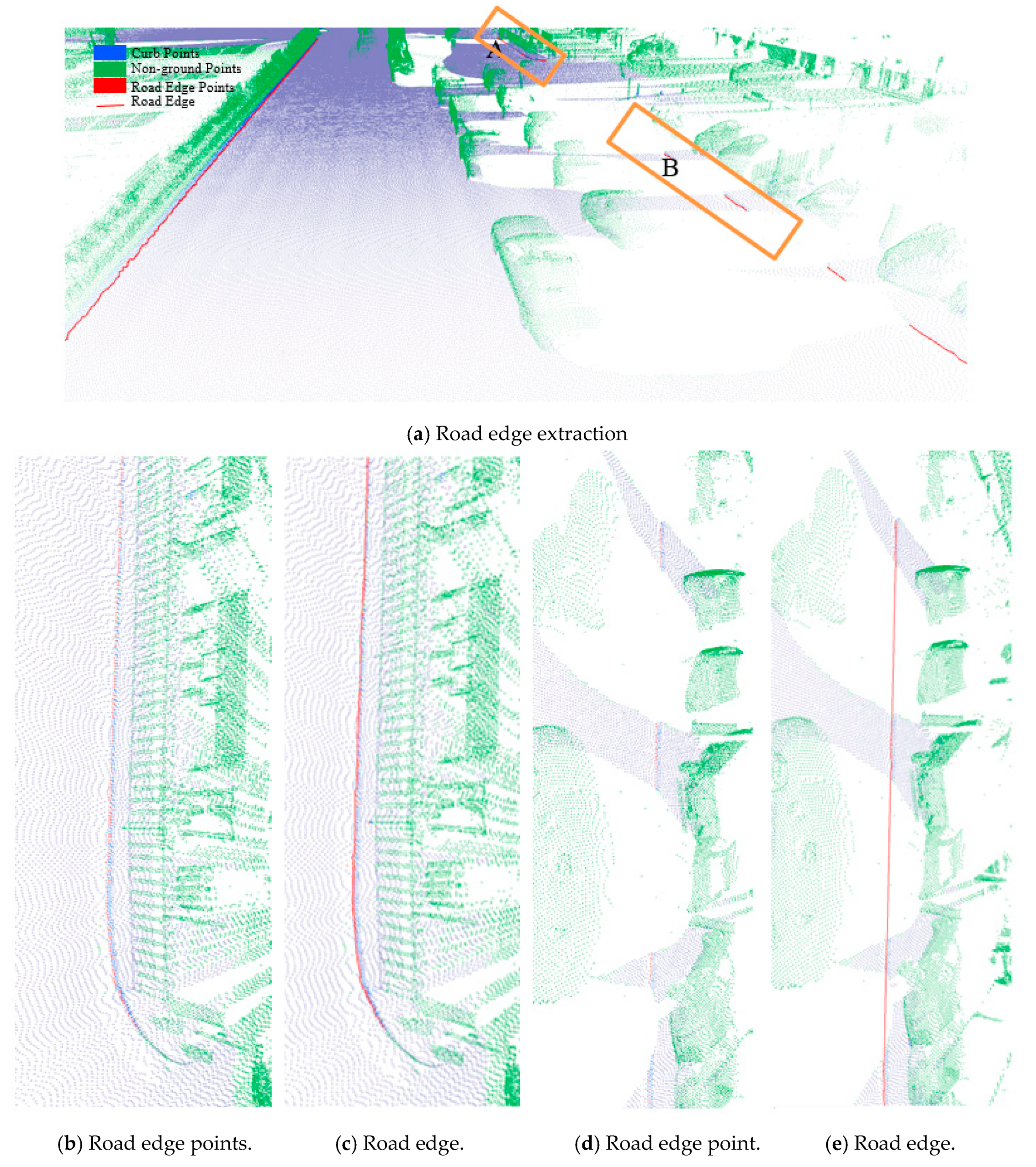
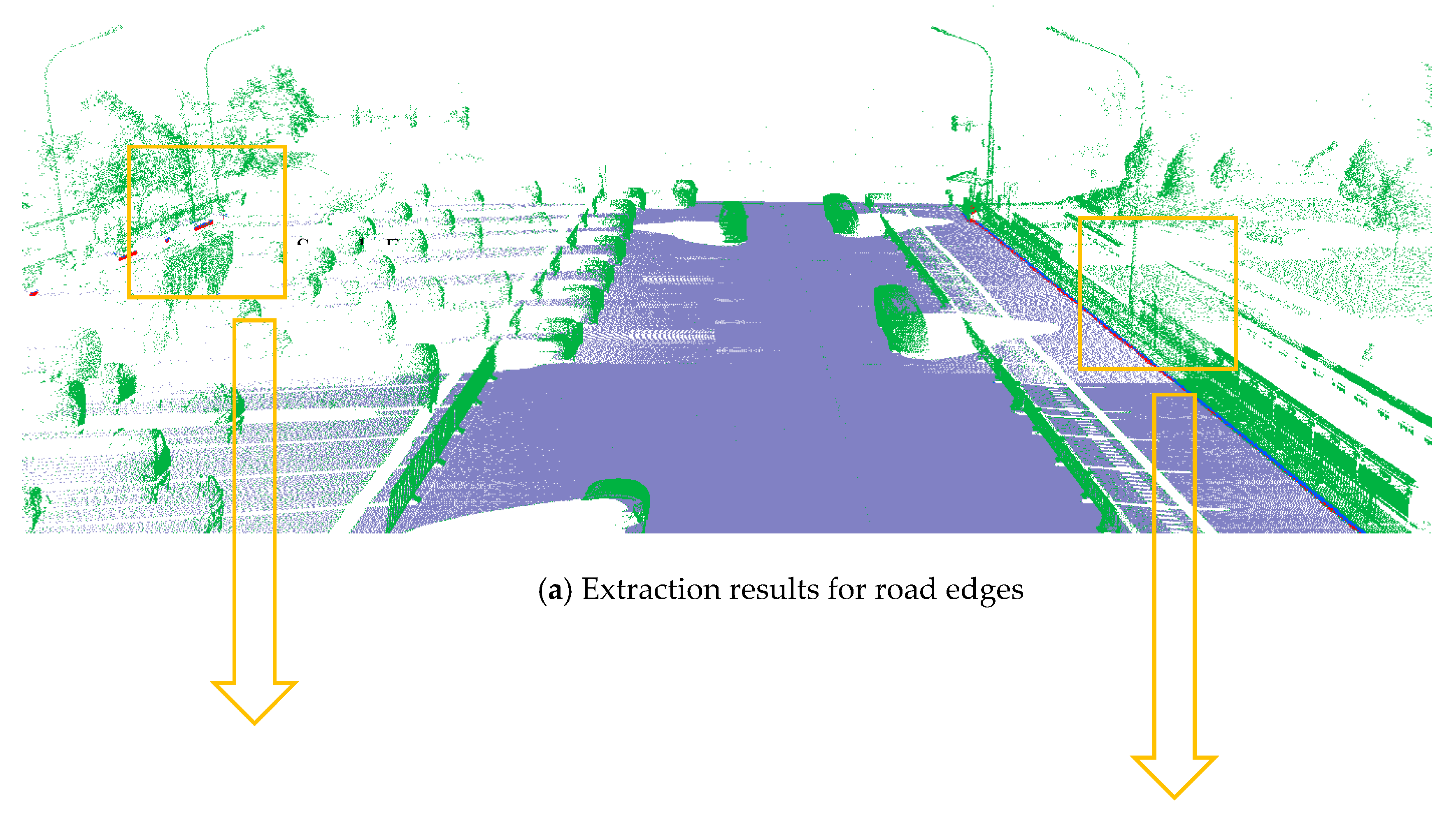
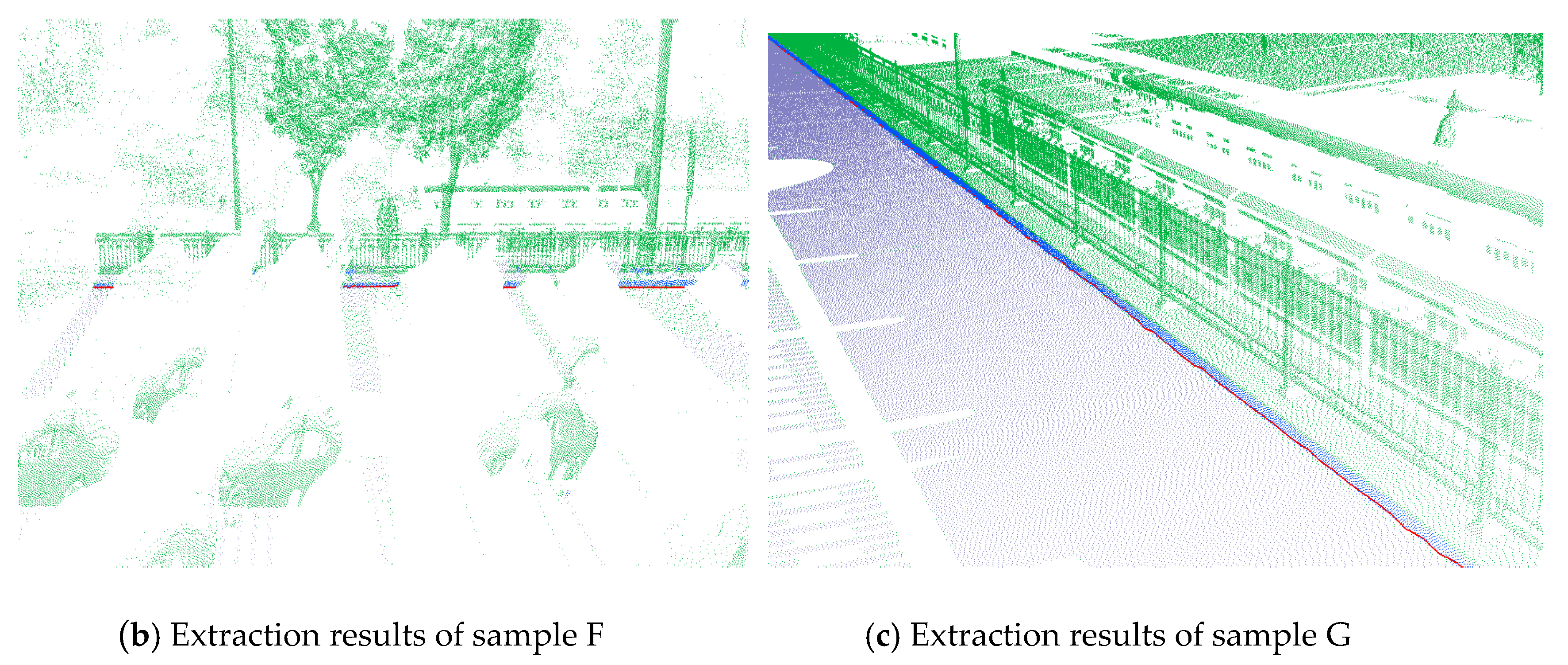
2]. Extracted road edges, denoted by box B in
Figure 8b, are illustrated in
Figure 13. Road points acquired within the road area are based on the extracted road edges. As shown in
Figure 13b, road edges were still successfully extracted by the proposed method despite the influence of cars, pedestrians, or other objects. The entire road edge was easily acquired based on similar geometric road boundaries. For non-structural roads without a curb (i.e., rural data), our proposed method also achieved high assessment results for correctness, completeness, and quality values of 96.3%, 99.9%, and 95.9%, respectively. However, the previous method [
2] is not suitable for road edge extraction on non-structural roads because it is based on the thresholds of height jump, slope, and density to identify road curbstones. In contrast, our proposed method is mainly based on the roughness of the extracted surface.
For our proposed method, correctness values were high because road edges were acquired from curb points located at intersections with ground points for the structural data and from the ground boundary points for non-structural data. The calculation of completeness and quality was related to the non-extracted section, which was primarily concentrated on the larger part of the curved road, such as at road turns and residential entrances. This can be attributed to the fact that the extraction of curb points was not sensitive to road curve. As mentioned in
Section 3.3, the road curve affected the extraction result. However, for
Figure 10, which shows many road curves, road entrances, and occlusions, the extraction result is better. This is because the region depicted in
Figure 10 has a high density. Subsequently, for the road turns, we could achieve high-resolution extraction results. Hence, the density and road curves were closely related to the extraction results. The curbstone points cannot be successfully extracted from road curves with lower density, which leads to failure to extract road edges. If the density increases, the accuracy of extraction results in corners will increase accordingly.
There are two main reasons for road corner extraction failure. The first is the influence of density (i.e., the higher the density, the more the extraction completeness increases). The second is the occurrence of data holes caused by vehicle occlusion during data collection. Point cloud density is influenced by several parameters, such as point frequency, line frequency, and speed, among which the point and line frequencies are influenced by the specific type of equipment, and the speed is a subjective factor that has great influence on the point density during the data acquisition process. If the vehicle slows down, the laser point density increases and the point density decreases. Therefore, to improve the accuracy of corner extraction, the following two points in the data acquisition process require strict accordance with the precision requirements of the actual engineering: 1) Peak periods during mornings and evenings should be avoided, which ensure the absence of occlusion via vehicles and pedestrians; and 2) for road curves, the speed should be appropriately reduced to ensure a relatively high point density at corners, which help enhance the completeness of the road boundary extraction.
In summary, the proposed method has several advantages. First, this method can be used not only in the accurate extraction of large-scale structural road edges, but also large-scale non-structural roads. Second, the method is implemented based on surface roughness without directly computing attributes such as slope, angle, and density. Moreover, it is effective regardless of whether the road width is fixed, the road is regular, or pedestrians and vehicles are present. Fourth, the correctness, completeness, and quality values associated with the extraction results are high and exceed those of previous methods. The assessment results are highly consistent across varying road conditions (i.e., complex road conditions with cars, trees, fences, pedestrians, and different curb types), which demonstrates the stability of our method. However, this method is not sensitive to road bending degree, leading to poor road edge assessment results when the road has a relatively sharp bend. At the same time, based on the extraction results of road edges, the road centerline, road width, cross slope, and longitudinal slope can easily be achieved.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


































