A Novel Method for Estimating Pitch and Yaw of Rotating Projectiles Based on Dynamic Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Definition of Coordinate System and Principle of Zero-Crossing Method
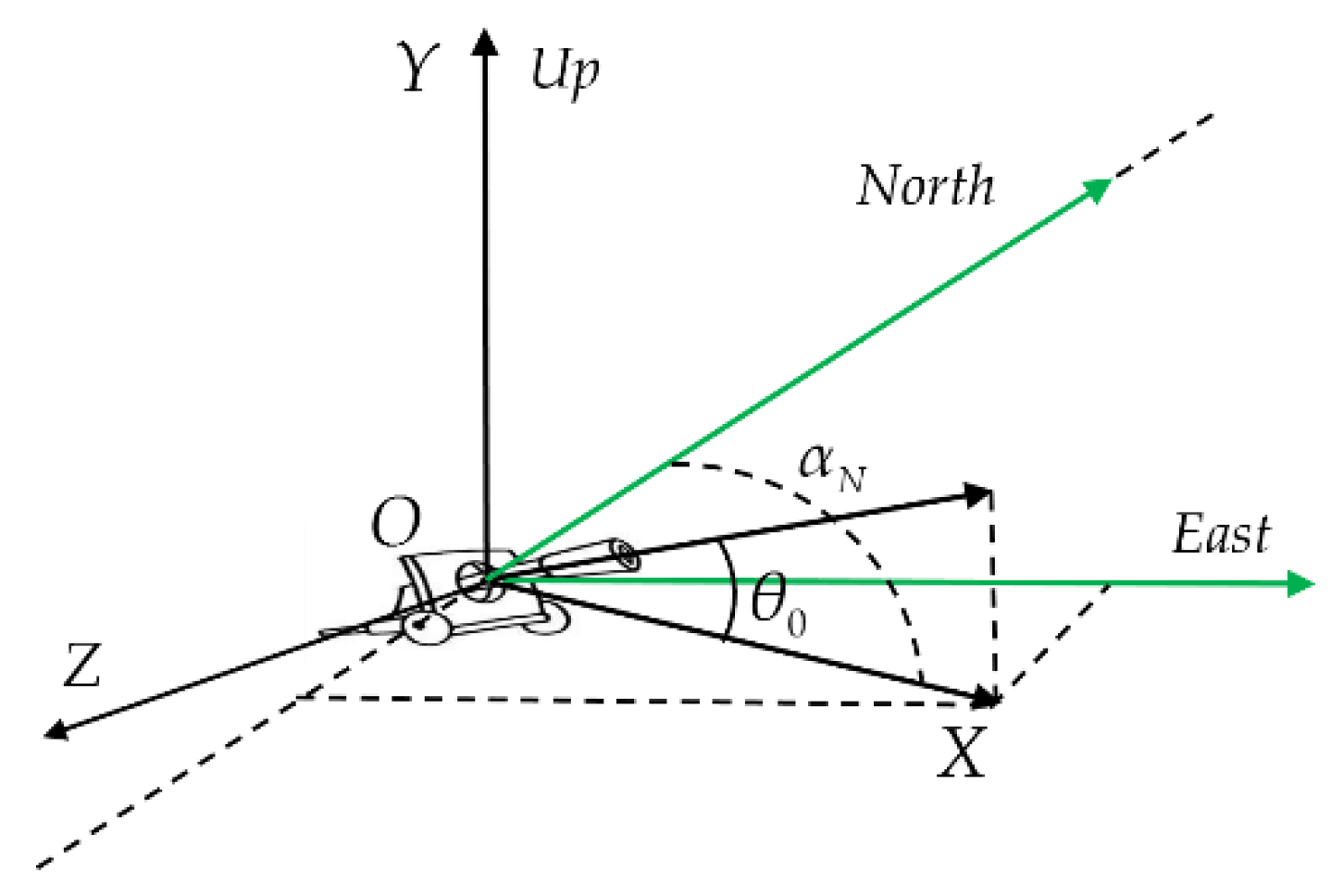
2.1. Coordinate Systems
2.2. Principle of Zero-Crossing Method
3. Method for Estimating Pitch and Yaw
3.1. Dynamics Constraint Equations
3.2. Relationship between Pitch, Yaw Angles and Magnetic Azimuth
3.3. Estimation of Dip and Yaw
4. Design of UKF
- Calculation of the sigma point set
- Prediction phase
- Correction phase
4.1. State Equation
4.2. Measurement Equation
5. Simulation and Experimental Results
5.1. Simulation and Analysis
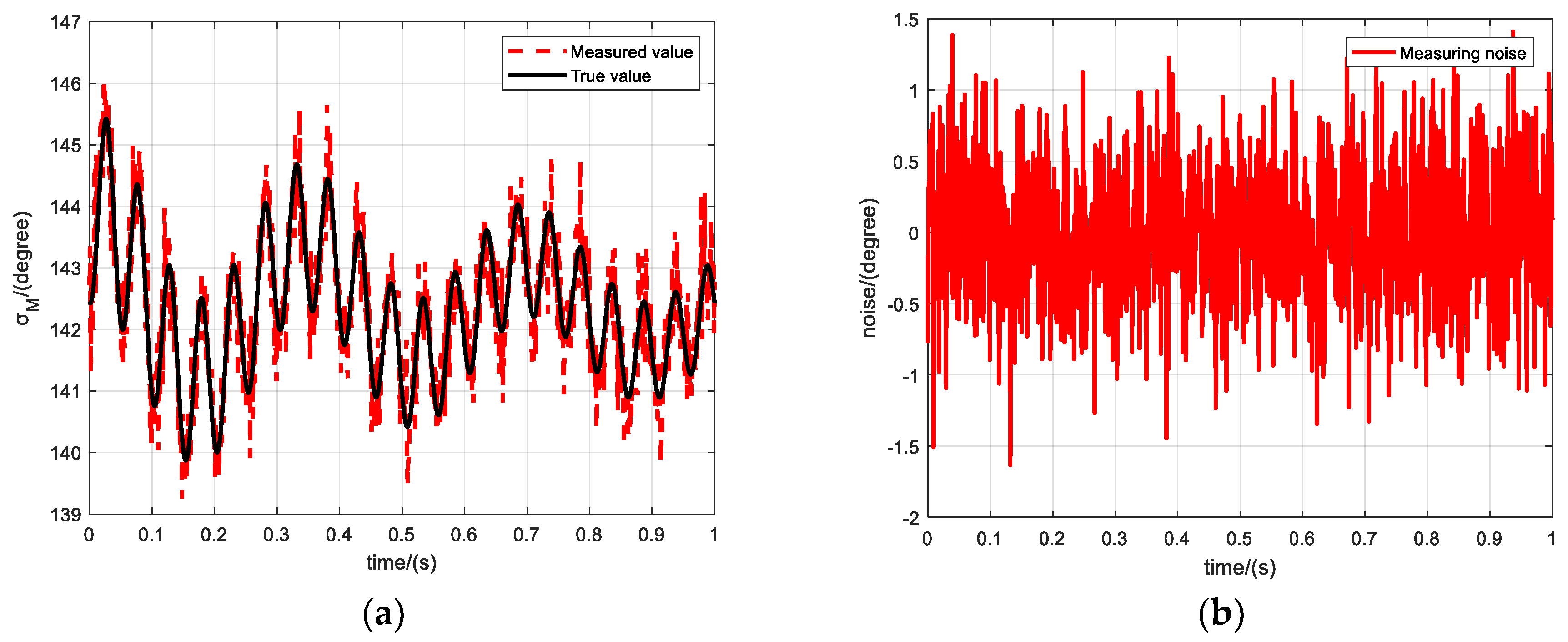
5.1.1. Simulation
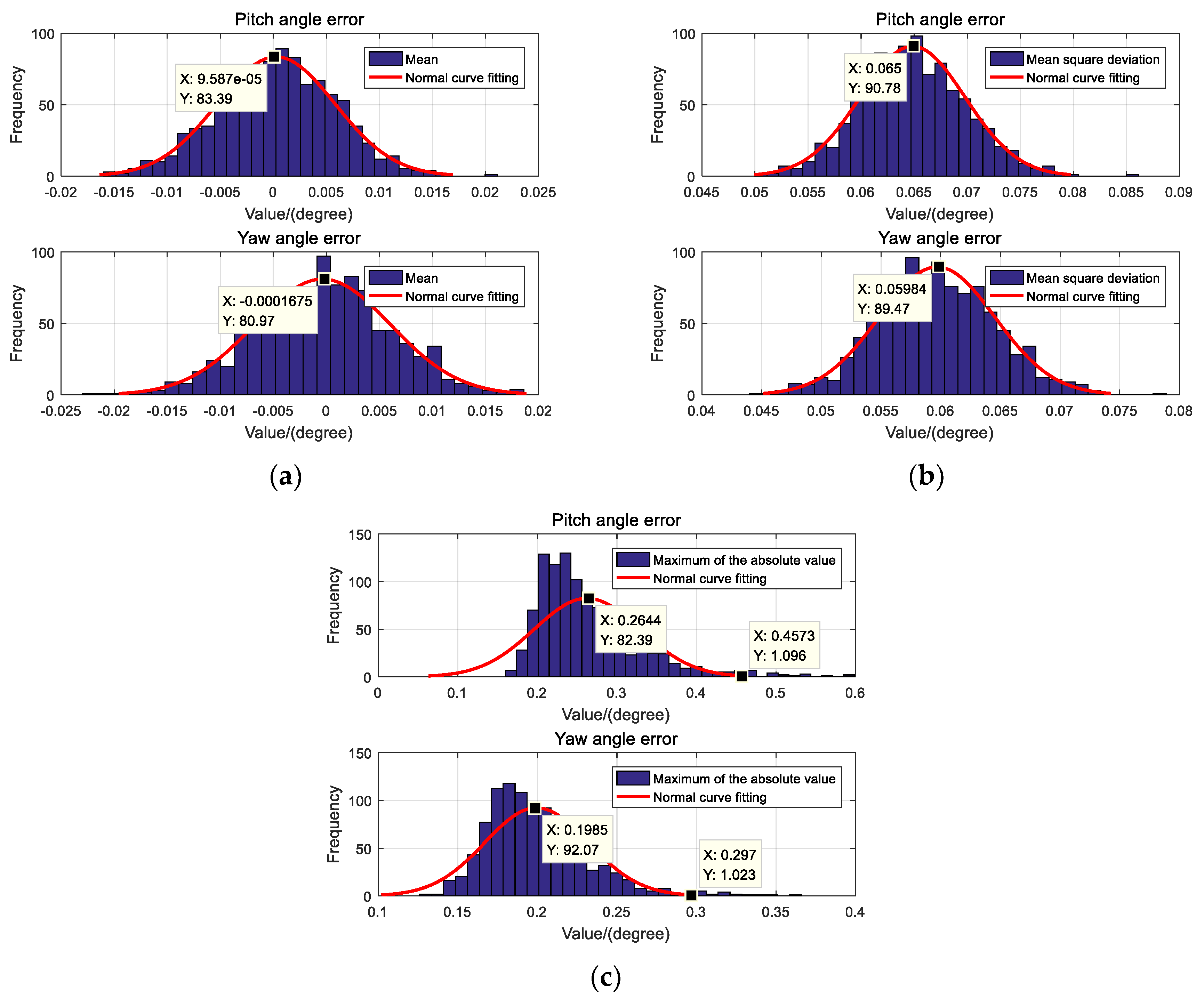
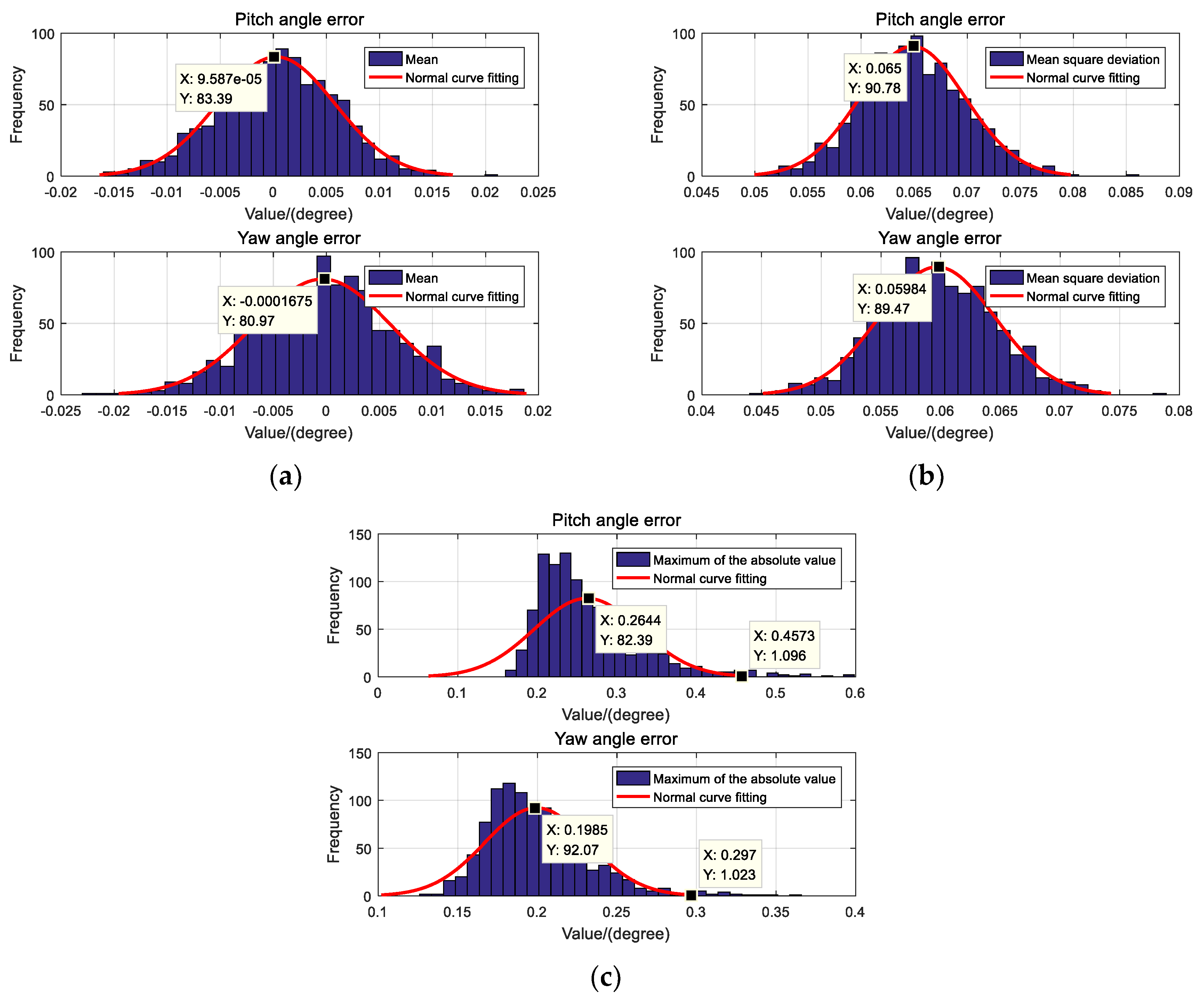
5.1.2. Monte Carlo Simulation
5.1.3. Analysis of simulation results
- When analyzing the moment applied to the projectile during flight, it is assumed that the projectile shape has no eccentricity and there is no wind. Among external moments, only the static and equatorial damping moments are considered, while the smaller Magnus moment is ignored. Moreover, since the attack angle is small, the resulting small ballistic deviation from the firing surface allows approximations of during the state equation derivation process. Thus, there is uncertainty in the adjustment of the state noise parameters.
- Under the same sampling step-size, the fourth-order classical Runge-Kutta discretization method results in smaller discretization errors compared to other method such as the Euler method, and its discrete equations are close to the continuous model.
5.2. Experiment and Analysis
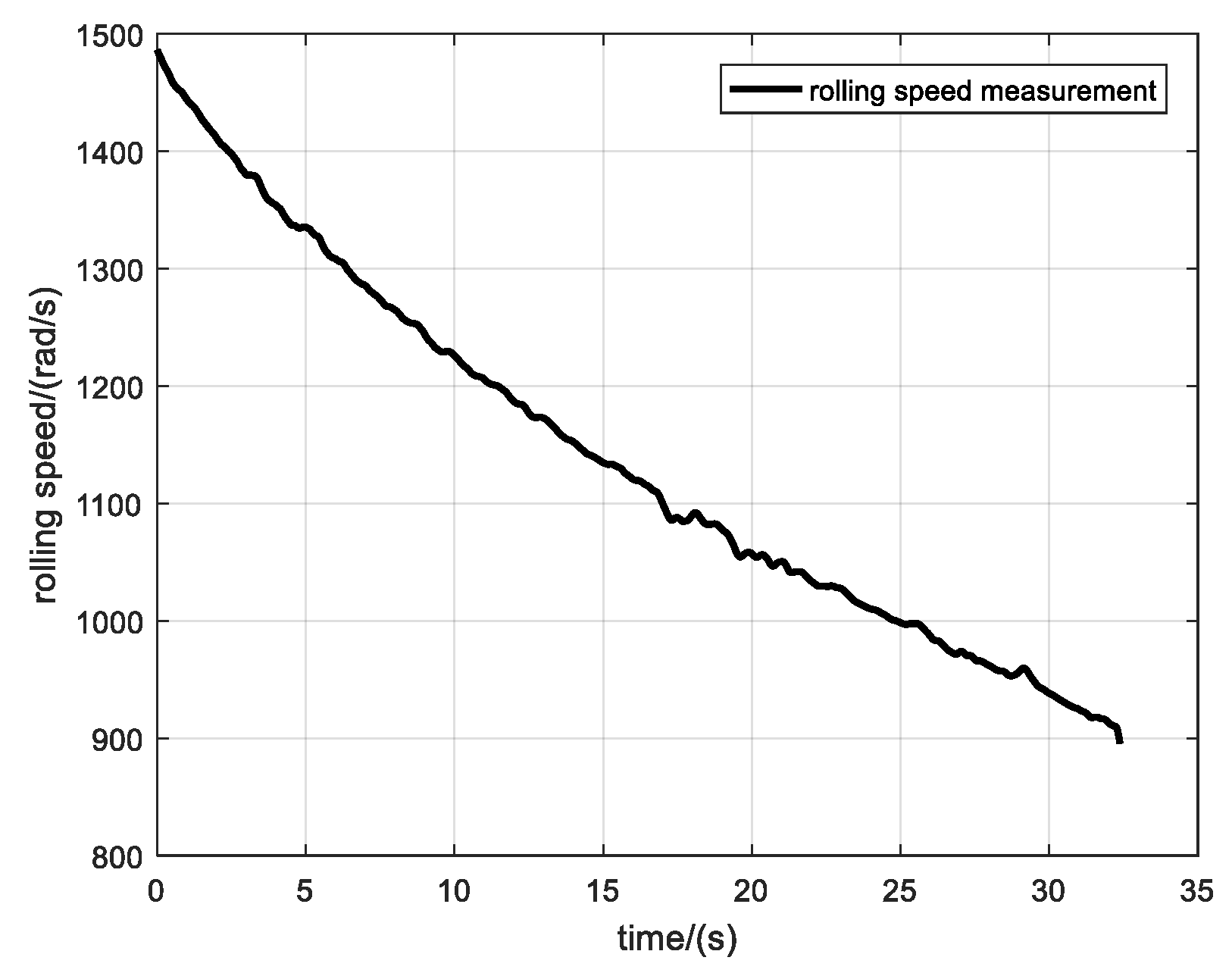
5.2.1. Experiment
5.2.2. Initial Alignment
5.2.3. Estimation of Pitch and Yaw Using RK4-UKF
5.2.4. Discussion on Experimental Results
- In a real-world scenario, the actual static and equatorial damping moment coefficients of the flying projectile often deviated from the theoretical values that were determined based on the projectile design. Therefore, it is necessary to adjust the theoretical moment coefficient when performing the initial alignment based on trajectory simulation.
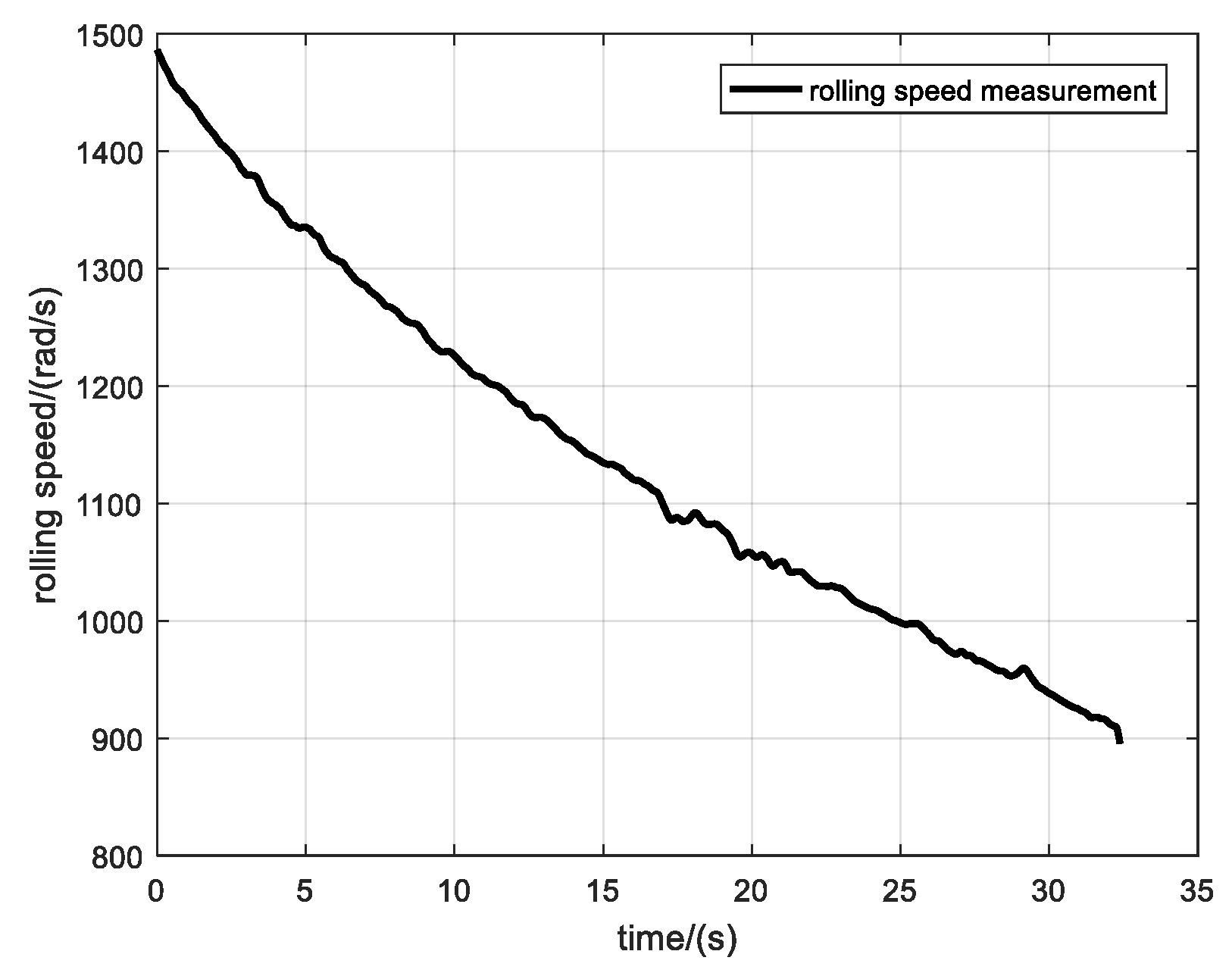
- Oscillation is bound to happen during the descending section of the actual trajectory. The larger the shooting angle, the larger the oscillation amplitude, which is the well-known Mayevsky problem. By contrast, the end section of the theoretical trajectory is free of oscillation. This is because the motion of projectile axis is obtained based on the pure kinematics theory, which assumes that the moment of momentum vector coincides with the projectile axis. Therefore, there is no projectile axis swing problem during the end section of the theoretical trajectory. The oscillation phenomenon that occurs during the descending section of the actual trajectory can be attributed to two factors: (1) A reduction of the gyro stability factor due to decreased rotational speed; (2) The dramatic change of the aerodynamic load that causes the projectile to oscillate when the projectile flight speed is in the transonic region.
- The method for estimating pitch and yaw angels proposed in this paper is based on the constraints of dynamics equations of projectile. Through proper approximations, the relationship between the attitude and velocity angles can be determined, i.e., the slow-motion terms of the lateral attitude of the projectile are consistent with the velocity direction. This is also the basis for determining the rationality of the filtering results.
- Limited by the current attitude measurement technology and experimental conditions, the true value of the projectile attitude cannot be obtained in the field experiment, and the accuracy of the estimation cannot be quantified. The experiment is mainly to verify the feasibility of the method in practical engineering applications. The method is proven to be feasible and effective through the analysis of the flight stability of the projectile. The quantification of estimation error by designing the verification experiment is the focus of the next step in the future.
6. Conclusions
- Although the geomagnetic azimuth used in the proposed method was calculated using the zero-crossing method, any other method can also be used.
- As the proposed method deals with high-spinning projectiles in steady flight, the magnetic declination and dip during the projectile flight can be obtained in two ways: (1) Calculation based on the geomagnetic model; (2) Calculation using the measured launch location based on the assumption that the magnetic declination and dip are constant at each location.
- The object studied in this paper is the idealized projectile, which only considers the static moment and the equatorial damping moment, and assumes that there is no wind. The influence of the wind field model, Magnus moment and the moment caused by the shape asymmetry on the attitude of projectile will be considered in the future works, which makes the simulation model more accurate and improves the accuracy of the estimation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hepner, D.J.; Harkins, T.E. Determining inertial orientation of a spinning body with body-fixed sensors. Proc. SPIE Int. Soc. Opt. Eng. 2000, 4025, 68–78. [Google Scholar]
- Springmann, J.C.; Sloboda, A.J.; Klesh, A.T.; Bennett, M.W.; Cutler, J.W. The attitude determination system of the RAX satellite. Acta Astronaut. 2012, 75, 120–135. [Google Scholar] [CrossRef]
- Lefferts, E.J.; Markley, F.L.; Shuster, M.D. Kalman Filtering for Spacecraft Attitude Estimation. J. Guid. Control. Dyn. 1982, 5, 417–429. [Google Scholar]
- Pittelkau, M.E. Kalman Filtering for Spacecraft System Alignment Calibration. J. Guid. Control. Dyn. 2001, 24, 1187–1195. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L. Three-Axis Attitude Estimation Using Rate-Integrating Gyroscopes. J. Guid. Control. Dyn. 2016, 39, 1513–1526. [Google Scholar] [CrossRef]
- Park, C.G.; Kim, K.; Kang, W.Y. UKF Based In-Flight Alignment Using Low Cost IMU. In Proceedings of the Aiaa Guidance, Navigation, & Control Conference & Exhibit, Keystone, CO, USA, 21–24 August 2006. [Google Scholar]
- Rhudy, M.; Gross, J.; Gu, Y.; Napolitano, M.R. Fusion of GPS and Redundant IMU Data for Attitude Estimation. In Proceedings of the Aiaa Guidance Navigation & Control Conference, Minneapolls, MN, USA, 13–16 August 2012. [Google Scholar]
- Ettl, J.; Schmidt, A.P.; Turner, J.; Kim, D.G. Using data fusion of DMARS-R-IMU and GPS data for improving attitude determination accuracy. In Proceedings of the International Conference on Space Operations, Daejeon, Korea, 16–20 May 2016. [Google Scholar]
- Changey, S.; Beauvois, D.; Fleck, V. A Mixed Extended-Unscented Filter for attitude estimation with magnetometer sensor. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2006; pp. 2892–2897. [Google Scholar]
- Abdelrahman, M.; Park, S.Y. Integrated Attitude Determination and Control System via Magnetic Measurements and Actuation. Acta Astronaut. 2011, 69, 168–185. [Google Scholar] [CrossRef]
- Ivanov, D.S.; Ovchinnikov, M.Y.; Penkov, V.I.; Roldugin, D.S.; Doronin, D.M.; Ovchinnikov, A.V. Advanced Numerical Study of the Three-Axis Magnetic Attitude Control and Determination with Uncertainties. Acta Astronaut. 2017, 132, 103–110. [Google Scholar] [CrossRef]
- Psiaki, M.L.; Oshman, Y. Spacecraft Attitude Rate Estimation from Geomagnetic Field Measurements. J. Guid. Control. Dyn. 2003, 26, 244–252. [Google Scholar] [CrossRef]
- Christin, S.H. Satellite Attitude Determination Using Magnetometer Data Only. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Roberts, T.M.; Lynch, K.A.; Clayton, R.E.; Disbrow, M.E. Magnetometer-Based Attitude Determination for Deployed Spin-Stabilized Spacecraft. J. Guid. Control. Dyn. 2017, 40, 2941–2947. [Google Scholar] [CrossRef]
- Halil Ersin Söken, S.S. Real-Time Attitude-Independent Magnetometer Bias Estimation for Spinning Spacecraft. J. Guid. Control Dyn. 2017, 41, 276–279. [Google Scholar] [CrossRef]
- Celani, F. Spacecraft Attitude Stabilization using Magnetorquers with Separation between Measurement and Actuation. J. Guid. Control Dyn. 2015, 39, 2184–2191. [Google Scholar] [CrossRef]
- Robinson, J.B.; Richie, D.J. Stabilization and Attitude Determination Methods for FalconSAT-3. J. Spacecr. Rocket. 2016, 507–519. [Google Scholar] [CrossRef]
- Rogers, J.; Costello, M.; Harkins, T.; Hamaoui, M. Effective Use of Magnetometer Feedback for Smart Projectile Applications. Navigation 2011, 58, 203–219. [Google Scholar] [CrossRef]
- Sedlak, J.E. Iterative magnetometer calibration. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Keystone, CO, USA, 21–24 August 2006. [Google Scholar]
- Hu, X.; Pang, H.; Fu, L.; Pan, M. Magnetometer calibration improvement using wavelet and genetic algorithm. IEEJ Trans. Electr. Electron. Eng. 2016, 11, S130–S137. [Google Scholar] [CrossRef]
- John, L.C.; Kok-Lam Lai Richard, R.H. Real-Time Attitude-Independent Three-Axis Magnetometer Calibration. J. Guid. Control Dyn. 2005, 28, 115–120. [Google Scholar]
- Wilson, M.J. Onboard Attitude Determination for Gun-Launched Projectiles. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005. [Google Scholar]
- Wilson, M.J. Projectile Navigation and the Application to Magnetometers; Dissertations & Theses—Gradworks; University of Delaware: Newark, DE, USA, 2007. [Google Scholar]
- Changey, S.; Pecheur, E.; Wey, P. Real time Estimation of Supersonic Projectile Roll Angle using Magnetometers: In-lab Experimental Validation. IFAC Proc. Vol. 2009, 42, 123–127. [Google Scholar] [CrossRef]
- Changey, S.; Pecheur, E.; Bernard, L.; Sommer, E. Real time estimation of projectile roll angle using magnetometers: In-flight experimental validation. In Proceedings of the Position Location & Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012. [Google Scholar]
- Maley, J.M. Efficient Attitude Estimation for a Spin-Stabilized Projectile. J. Guid. Control. Dyn. 2015, 39, 339–350. [Google Scholar] [CrossRef]
- Rogers, J.; Costello, M. A Low-Cost Orientation Estimator for Smart Projectiles Using Magnetometers and Thermopiles. Navigation 2012, 59, 9–24. [Google Scholar] [CrossRef]
- Bar-Itzhack, I.Y.; Idan, M. Recursive attitude determination from vector observations Euler angle estimation. J. Guid. Control. Dyn. 1987, 10, 152–157. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of Nonlinear Attitude Estimation Methods. J. Guid. Control Dyn. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- Theil, S.; Appel, P.; Schleicher, A. Low Cost, Good Accuracy—Attitude Determination using Magnetometer and Simple Sun Sensor. In Proceedings of the 17th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 11–14 August 2003. [Google Scholar]
- Teshnizi, M.M.; Shirazi, A. Attitude estimation and sensor identification utilizing nonlinear filters based on a low-cost MEMS magnetometer and sun sensor. Aerosp. Electron. Syst. Mag. IEEE 2015, 30, 20–33. [Google Scholar] [CrossRef]
- Bekkeng, J.K.; Psiaki, M. Attitude Estimation for Sounding Rockets Using Microelectromechanical System Gyros. J. Guid. Control. Dyn. 2008, 31, 533–542. [Google Scholar] [CrossRef]
- Thompson, A.A. A Procedure for Calibrating Magnetic Sensors; Army Research Laboratory (ARL): Adelphi, MD, USA, 2002; Volume 524, pp. 1–2. [Google Scholar]
- Harkins, T.E.; Hepner, D.J. MAGSONDE (patent pending): A device for making angular measurements on spinning projectiles using magnetic sensors. Proc. SPIE Int. Soc. Opt. Eng. 2000, 4025, 60–67. [Google Scholar]
- Li, D.; BU, X. Attitude Measurement on High-spinning Projectile Using Magnetic Sensors and Acceletometers. Trans. Nanjing Univ. Aeronaut. Astronaut. 2008, 25, 106–112. [Google Scholar]
- Zhu, J.; Wu, P.; Bo, Y. A Novel Attitude Estimation Algorithm Based on the Non-Orthogonal Magnetic Sensors. Sensors 2016, 16, 730. [Google Scholar] [CrossRef]
- Zhao, H.; Su, Z.; Liu, F.; Li, C.; Li, Q. Magnetometer-Based Phase Shifting Ratio Method for High Spinning Projectile’s Attitude Measurement. IEEE Access 2019, 7, 22509–22522. [Google Scholar] [CrossRef]
- Boutayeb, M.; Sébastien, C.; Bara, J. A strong tracking extended Kalman observer for projectile attitude and position estimation. Proc SPIE 2007, 6538, 65381G-11. [Google Scholar]
- Allik, B.; Ilg, M.; Zurakowski, R. Ballistic Roll Estimation using EKF Frequency Tracking and Adaptive Noise Cancellation. IEEE Trans. Aerosp. Electron. Syst 2013, 49, 2546–2553. [Google Scholar] [CrossRef]
- Changey, S.; Fleck, V.; Beauvois, D. Projectile attitude and position determination using magnetometer sensor only. Proc. SPIE Int. Soc. Opt. Eng. 2005, 13, 802–806. [Google Scholar]
- Brink, K.M. Unscented Partial-Update Schmidt–Kalman Filter. J. Guid. Control. Dyn. 2018, 41, 929–935. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented Filtering and Nonlinear Estimation. Proc. IEEE 2004, 93, 401–422. [Google Scholar] [CrossRef]
- Lisano, M.E. Nonlinear Consider Covariance Analysis Using a Sigma-Point Filter Formulation. In Proceedings of the Guidance and Control 2006: Proceedings of the 29th Annual AAS Rocky Mountain Guidance and Control Conference, Univelt, San Diego, CA, USA, 4–8 February 2006. [Google Scholar]
- Lisano, M.E. Comparing Consider-Covariance Analysis with Sigma-Point Consider Filter and Linear-Theory Consider Filter Formulas. In Proceedings of the 20th International Symposium on Space Flight Dynamics, Annapolis, MD, USA, 24–28 September 2007. [Google Scholar]
- Stauch, J.; Jah, M. Unscented Schmidt–Kalman Filter Algorithm. J. Guid. Control. Dyn. 2015, 38, 117–123. [Google Scholar] [CrossRef]
- Zingg, D.; Chisholm, T. Runge-Kutta methods for linear problems. In Proceedings of the 12th Computational Fluid Dynamics Conference, San Diego, CA, USA, 19–22 June 1995. [Google Scholar]
- Hempel, P.R. Application of implicit Runge-Kutta methods. In Proceedings of the AIAA & AAS, Astrodynamics Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- Aristoff, J.M.; Poore, A. Implicit Runge-Kutta Methods for Orbit Propagation. In Proceedings of the AIAA & AAS, Astrodynamics Specialist Conference, Minneapolis, MN, USA, 13–16 August 2012; pp. 13–16. [Google Scholar]
- Han, Z. Exterior Ballistics for Projectiles and Rockets; Beijing Institute of Technology Press: Beijing, China, 2008; pp. 127–157. [Google Scholar]
- Pu, F.; Rui, X. Exterior Ballistics; National Defense Industry Press: Beijing, China, 1980; pp. 131–176. [Google Scholar]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, L.; Wang, L.; Liu, N.; Fu, J.; Zhong, Y. A Novel Method for Estimating Pitch and Yaw of Rotating Projectiles Based on Dynamic Constraints. Sensors 2019, 19, 5096. https://doi.org/10.3390/s19235096
An L, Wang L, Liu N, Fu J, Zhong Y. A Novel Method for Estimating Pitch and Yaw of Rotating Projectiles Based on Dynamic Constraints. Sensors. 2019; 19(23):5096. https://doi.org/10.3390/s19235096
Chicago/Turabian StyleAn, Liangliang, Liangming Wang, Ning Liu, Jian Fu, and Yang Zhong. 2019. "A Novel Method for Estimating Pitch and Yaw of Rotating Projectiles Based on Dynamic Constraints" Sensors 19, no. 23: 5096. https://doi.org/10.3390/s19235096
APA StyleAn, L., Wang, L., Liu, N., Fu, J., & Zhong, Y. (2019). A Novel Method for Estimating Pitch and Yaw of Rotating Projectiles Based on Dynamic Constraints. Sensors, 19(23), 5096. https://doi.org/10.3390/s19235096