Flexible Insole Sensors with Stably Connected Electrodes for Gait Phase Detection

 ,
,  and
and 
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
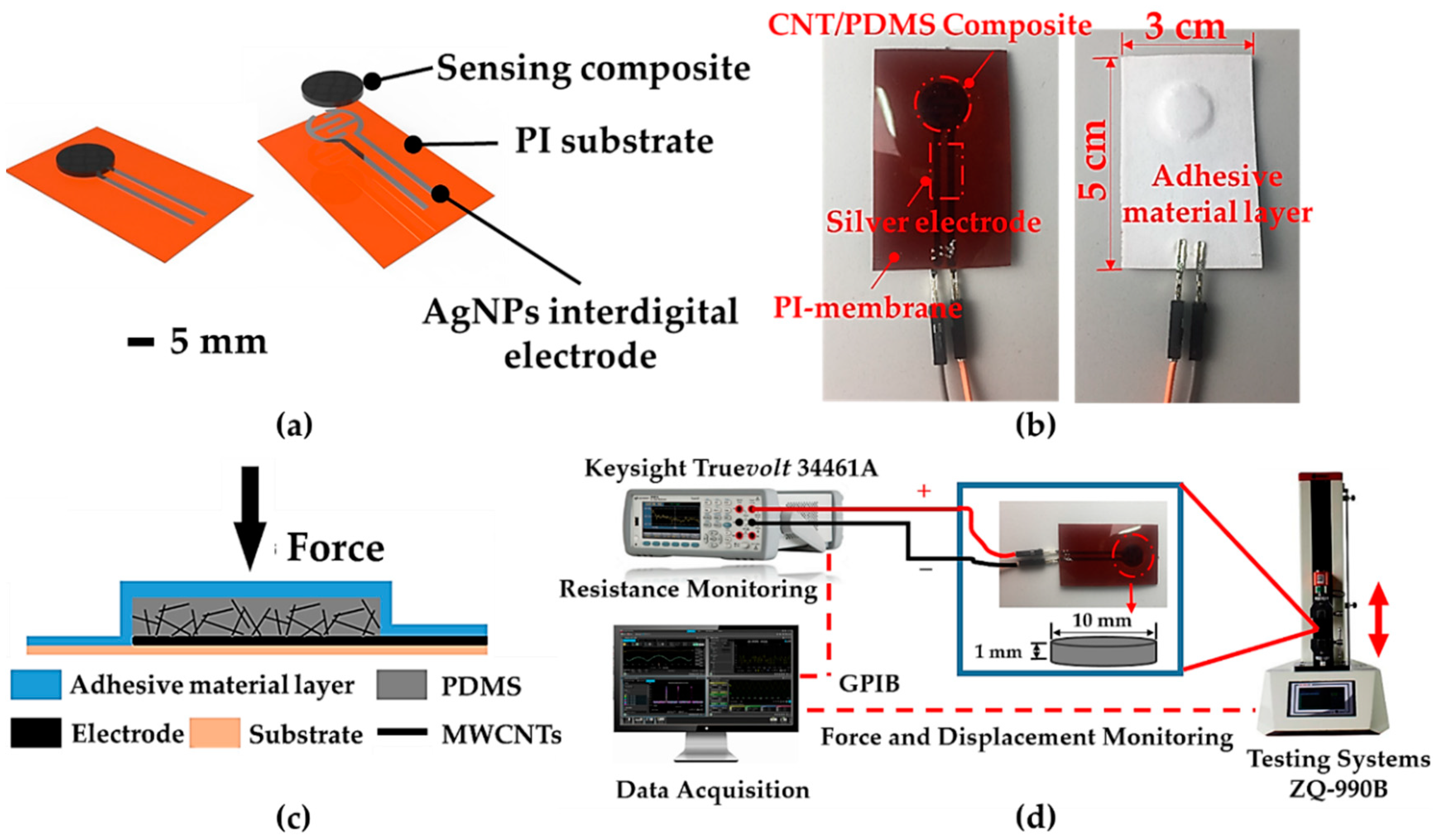
3.1. Structure Design
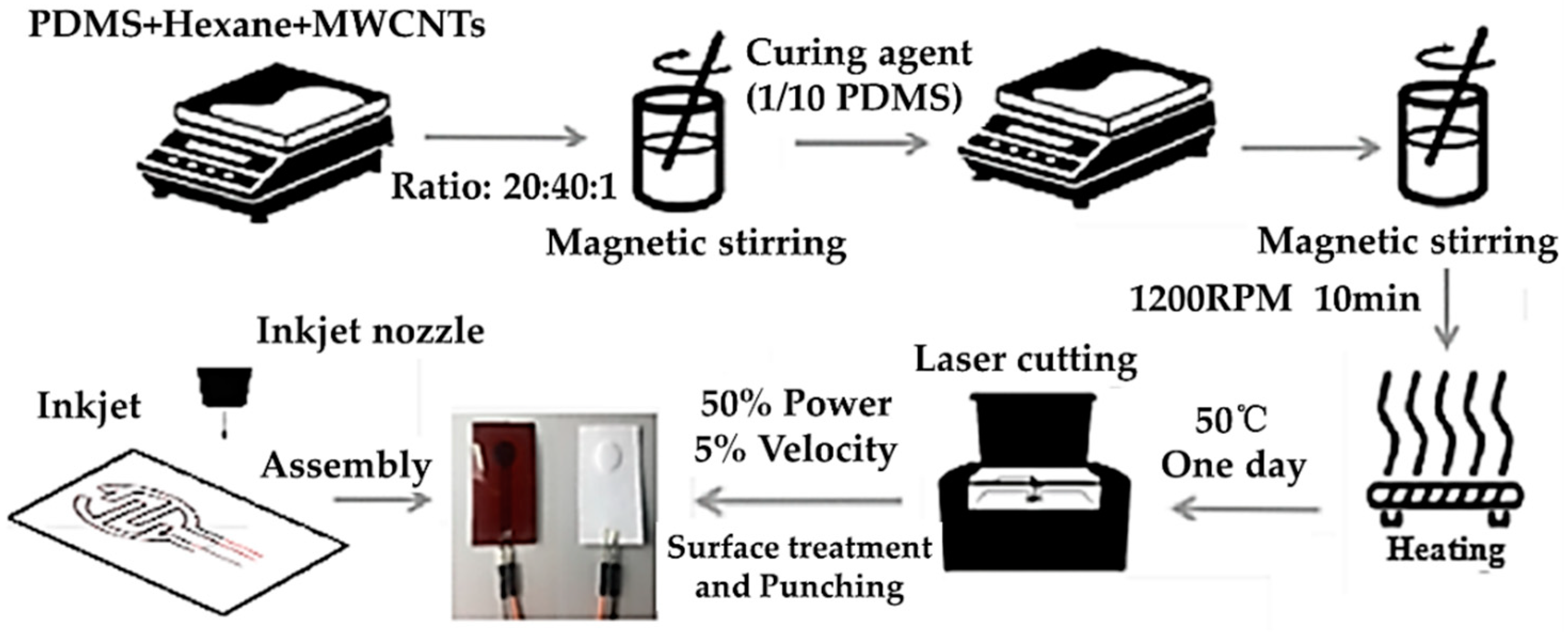
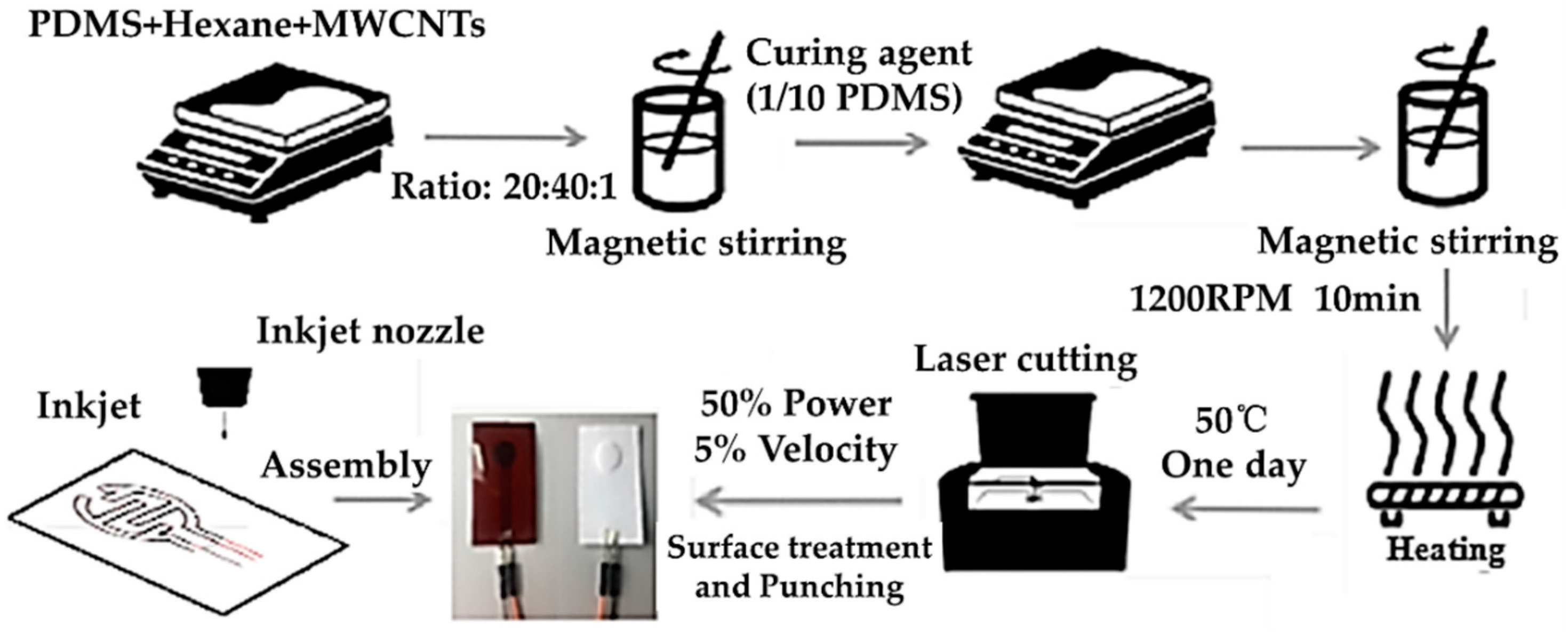
3.2. Fabrication
4. Results and Discussion
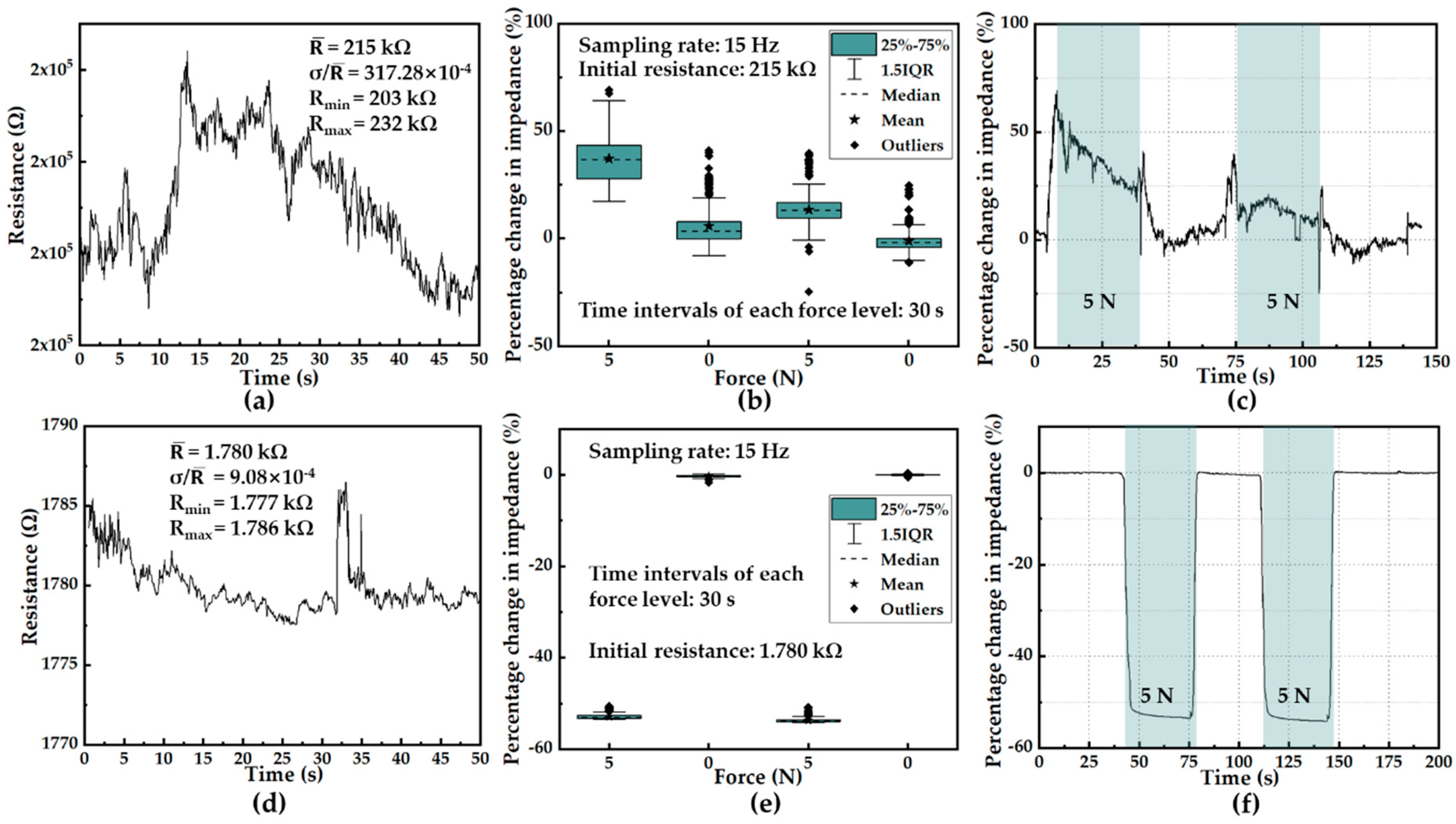
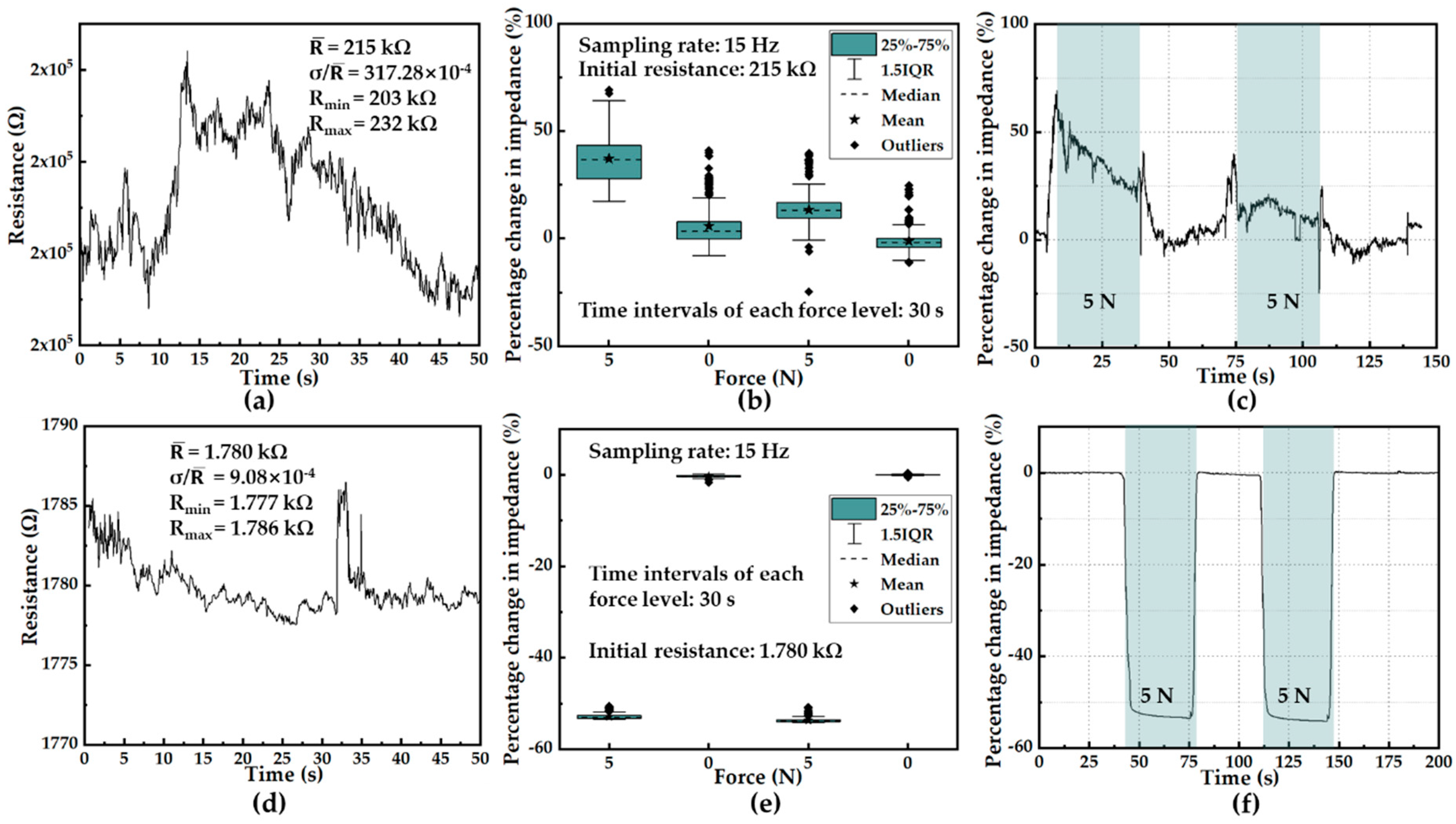
4.1. Sensing Unit Stabilizing
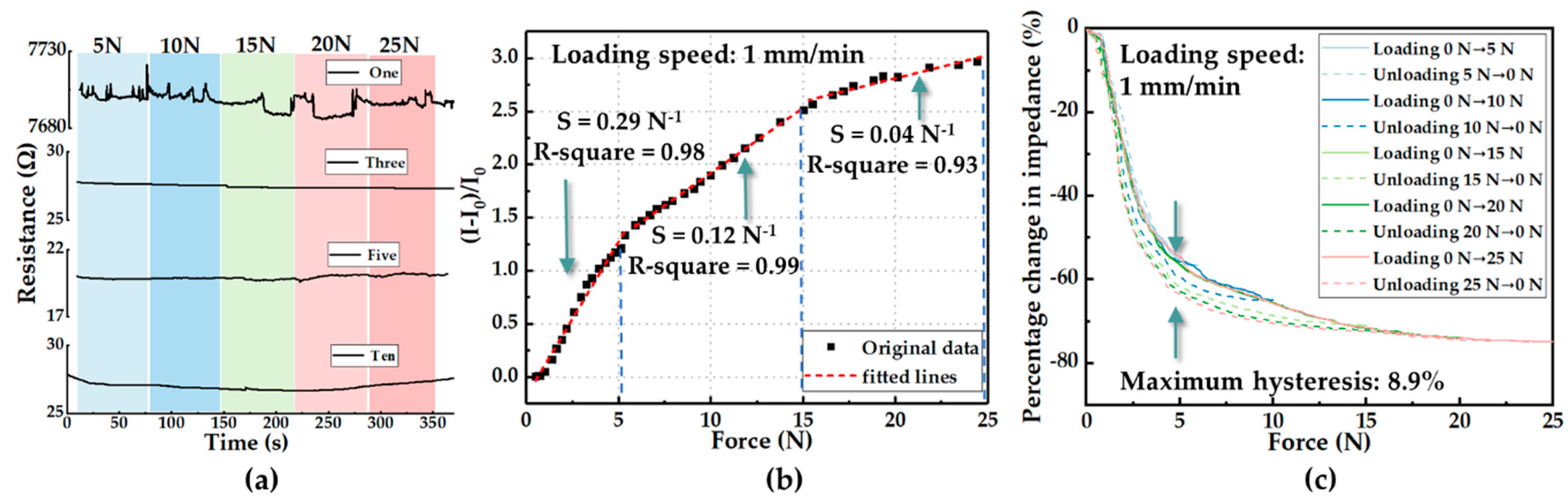
4.2. Sensing Unit Characterization
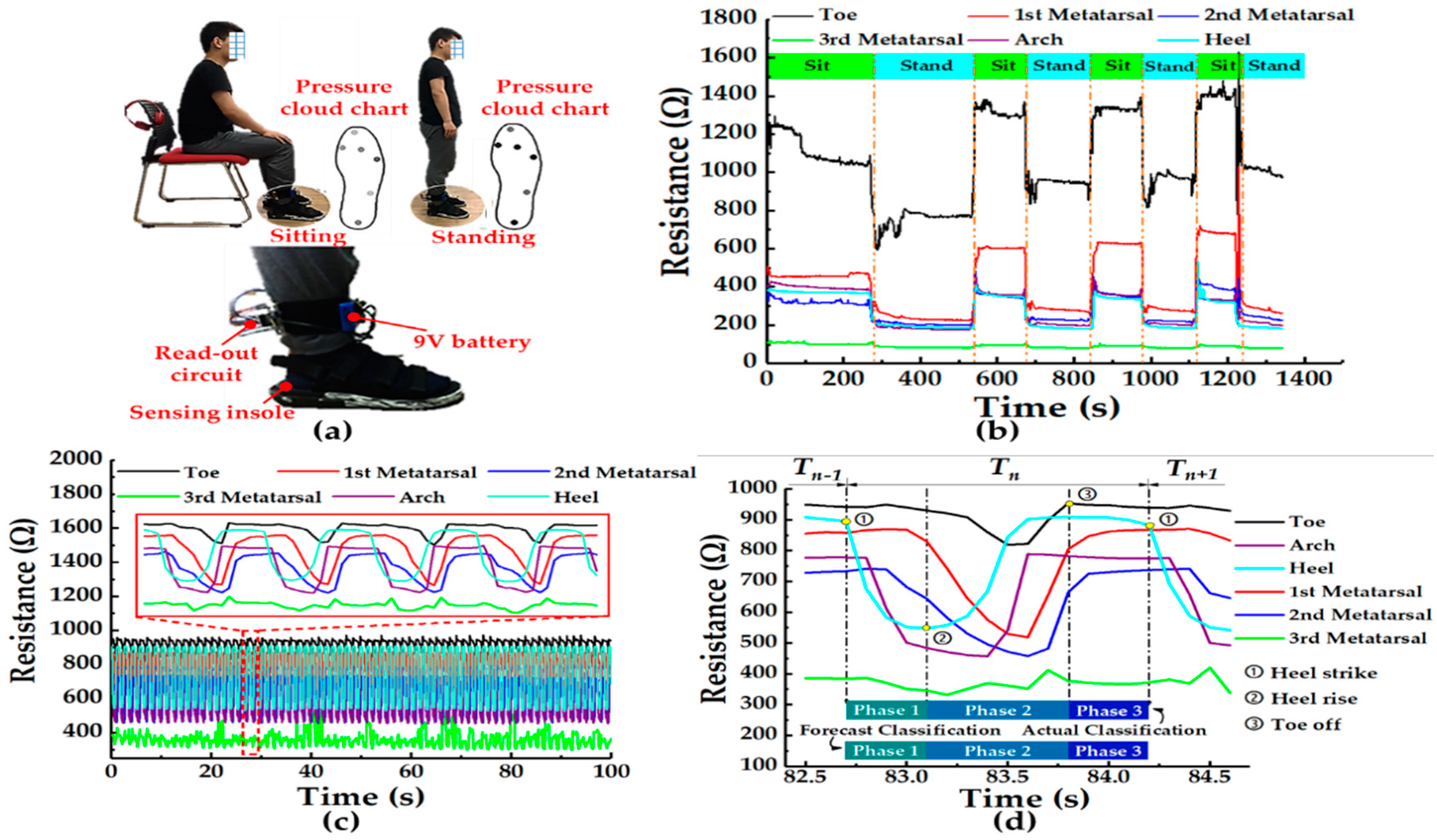
4.3. Integration of Flexible Insole Sensor
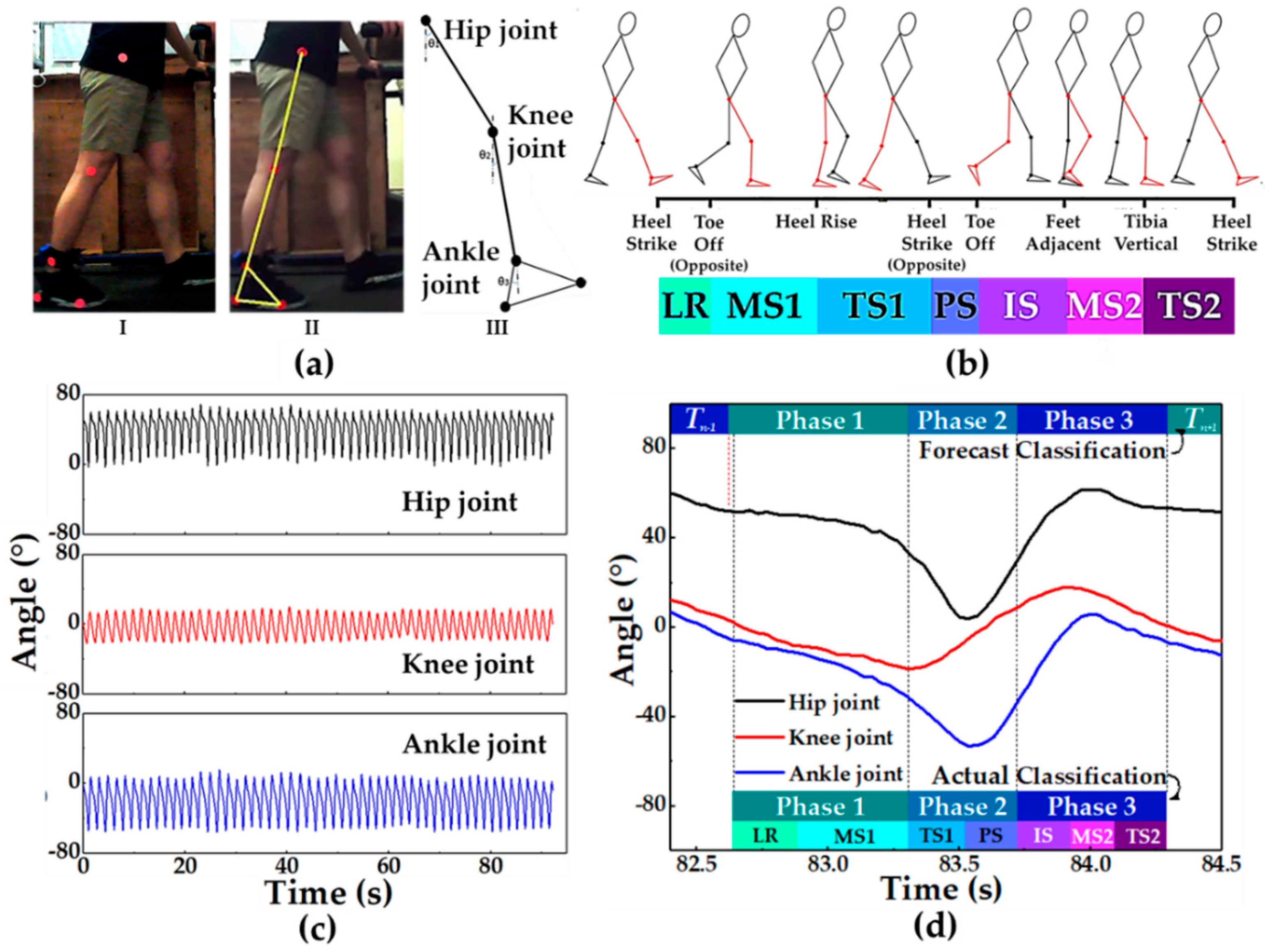
4.4. Gait Reference System Based on Vision
4.5. Validation of Gait Phase Detection based on Flexible Insole Sensor
5. Evaluation and Analysis
5.1. Key Factors of kNN Algorithm and Data Processing
5.2. Performance Evaluation and Comparison of Classifiers
5.3. Statistical Analysis and Comparison of Two Methods
5.4. Adaptability Analysis of Pressure-Sensitive Insole
6. Future Work
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | K = 1 | K = 5 | K = 10 | K = 50 | K = 100 | |
|---|---|---|---|---|---|---|
| Vision systems | Ratio = 0.025 | 91.304 | 92.750 | 94.203 | 95.652 | 97.101 |
| Ratio = 0.1 | 90.614 | 90.614 | 93.502 | 93.863 | 93.501 | |
| Ratio = 0.4 | 91.772 | 92.948 | 93.309 | 93.580 | 93.400 | |
| Pressure sensors | Ratio = 0.025 | 96.774 | 96.774 | 93.548 | 90.323 | 83.871 |
| Ratio = 0.1 | 98.000 | 95.000 | 95.000 | 92.000 | 88.000 | |
| Ratio = 0.4 | 94.000 | 96.250 | 94.750 | 91.500 | 87.000 |
| Methods | Phase | K = 1 | K = 5 | K = 10 | K = 50 | K = 100 | |
|---|---|---|---|---|---|---|---|
| Vision systems | Ratio = 0.025 | 1 | 100.000 | 100.000 | 100.000 | 100.000 | 100.000 |
| 2 | 77.778 | 83.333 | 83.333 | 88.889 | 100.000 | ||
| 3 | 90.909 | 90.910 | 95.455 | 95.455 | 100.000 | ||
| Ratio = 0.1 | 1 | 95.575 | 93.805 | 96.460 | 97.345 | 96.460 | |
| 2 | 79.710 | 84.058 | 88.406 | 89.855 | 88.406 | ||
| 3 | 92.632 | 91.579 | 93.684 | 92.632 | 93.684 | ||
| Ratio = 0.4 | 1 | 92.706 | 93.412 | 94.353 | 93.882 | 94.824 | |
| 2 | 88.104 | 91.450 | 94.052 | 94.052 | 92.937 | ||
| 3 | 93.024 | 93.447 | 91.748 | 92.961 | 92.233 | ||
| Pressure sensors | Ratio = 0.025 | 1 | 100.000 | 100.000 | 100.000 | 100.000 | 100.000 |
| 2 | 88.889 | 88.889 | 88.888 | 77.778 | 77.777 | ||
| 3 | 100.000 | 100.000 | 90.909 | 90.909 | 72.727 | ||
| Ratio = 0.1 | 1 | 100.000 | 100.000 | 100.000 | 100.000 | 100.000 | |
| 2 | 91.667 | 83.333 | 88.888 | 77.778 | 77.777 | ||
| 3 | 100.000 | 97.778 | 95.556 | 91.111 | 80.000 | ||
| Ratio = 0.4 | 1 | 95.763 | 98.305 | 100.000 | 100.000 | 100.000 | |
| 2 | 89.744 | 93.162 | 92.308 | 88.034 | 88.889 | ||
| 3 | 95.758 | 96.970 | 92.727 | 87.879 | 76.364 |
| Methods | Phase | K = 1 | K = 5 | K = 10 | K = 50 | K = 100 | |
|---|---|---|---|---|---|---|---|
| Vision systems | Ratio = 0.025 | 1 | 87.879 | 90.630 | 90.625 | 90.625 | 93.548 |
| 2 | 100.000 | 100.000 | 100.000 | 100.000 | 100.000 | ||
| 3 | 90.909 | 90.910 | 95.455 | 100.000 | 100.000 | ||
| Ratio = 0.1 | 1 | 88.525 | 92.174 | 93.s996 | 92.437 | 92.373 | |
| 2 | 94.828 | 89.231 | 91.045 | 92.537 | 92.424 | ||
| 3 | 90.722 | 89.691 | 94.681 | 96.703 | 95.699 | ||
| Ratio = 0.4 | 1 | 91.628 | 94.076 | 93.692 | 93.662 | 92.644 | |
| 2 | 91.506 | 89.781 | 89.399 | 90.681 | 90.253 | ||
| 3 | 92.086 | 93.092 | 95.696 | 95.511 | 96.447 | ||
| Pressure sensors | Ratio = 0.025 | 1 | 100.000 | 100.000 | 100.000 | 91.667 | 78.571 |
| 2 | 100.000 | 100.000 | 88.888 | 87.500 | 87.500 | ||
| 3 | 91.667 | 91.667 | 90.909 | 90.909 | 88.888 | ||
| Ratio = 0.1 | 1 | 100.000 | 100.000 | 100.000 | 91.176 | 81.579 | |
| 2 | 100.000 | 95.238 | 91.304 | 90.909 | 87.500 | ||
| 3 | 95.745 | 91.667 | 93.478 | 93.182 | 94.737 | ||
| Ratio = 0.4 | 1 | 95.763 | 96.667 | 92.913 | 84.286 | 78.146 | |
| 2 | 95.455 | 97.321 | 93.103 | 95.370 | 88.136 | ||
| 3 | 91.860 | 95.238 | 97.452 | 95.395 | 96.183 |
| Methods | Phase | K = 1 | K = 5 | K = 10 | K = 50 | K = 100 | |
|---|---|---|---|---|---|---|---|
| Vision systems | Ratio = 0.025 | 1 | 0.935 | 0.951 | 0.951 | 0.951 | 0.967 |
| 2 | 0.875 | 0.909 | 0.909 | 0.941 | 0.971 | ||
| 3 | 0.909 | 0.909 | 0.955 | 0.977 | 0.977 | ||
| Ratio = 0.1 | 1 | 0.919 | 0.930 | 0.952 | 0.948 | 0.944 | |
| 2 | 0.866 | 0.866 | 0.897 | 0.912 | 0.904 | ||
| 3 | 0.917 | 0.906 | 0.942 | 0.946 | 0.947 | ||
| Ratio = 0.4 | 1 | 0.922 | 0.937 | 0.940 | 0.938 | 0.937 | |
| 2 | 0.898 | 0.906 | 0.917 | 0.923 | 0.916 | ||
| 3 | 0.926 | 0.937 | 0.937 | 0.942 | 0.943 | ||
| Pressure sensors | Ratio = 0.025 | 1 | 1.000 | 1.000 | 1.000 | 0.957 | 0.880 |
| 2 | 0.941 | 0.941 | 0.889 | 0.824 | 0.824 | ||
| 3 | 0.957 | 0.957 | 0.909 | 0.909 | 0.800 | ||
| Ratio = 0.1 | 1 | 1.000 | 1.000 | 1.000 | 0.954 | 0.899 | |
| 2 | 0.957 | 0.889 | 0.894 | 0.870 | 0.899 | ||
| 3 | 0.978 | 0.946 | 0.945 | 0.921 | 0.867 | ||
| Ratio = 0.4 | 1 | 0.958 | 0.975 | 0.963 | 0.915 | 0.877 | |
| 2 | 0.925 | 0.952 | 0.927 | 0.916 | 0.885 | ||
| 3 | 0.938 | 0.961 | 0.950 | 0.915 | 0.851 |
References
- Pang, Z.; Yang, G.; Khedri, R.; Zhang, Y.T. Introduction to the Special Section: Convergence of automation technology, biomedical engineering, and health informatics toward the Healthcare 4.0. IEEE Rev. Biomed. Eng. 2018, 11, 249–259. [Google Scholar] [CrossRef]
- Verghese, J.; Lipton, R.B.; Hall, C.B.; Kuslansky, G.; Katz, M.J.; Buschke, H. Gait Abnormality and non-Alzheimer’s dementia abnormality of gait as a predictor of non-Alzheimer’s dementia. N. Engl. J. Med. 2002, 347, 1761–1768. [Google Scholar] [CrossRef]
- Tao, W.J.; Liu, T.; Zheng, R.C.; Feng, H.T. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef]
- Chen, K.Y.; Janz, K.F.; Zhu, W.M.; Brychta, R.J. Redefining the roles of sensors in objective physical activity monitoring. Med. Sci. Sports Exerc. 2012, 44, 13–23. [Google Scholar] [CrossRef]
- Yang, G.; Pang, G.; Pang, Z.; Gu, Y.; Mantysalo, M.; Yang, H. Non-invasive flexible and stretchable wearable sensors with nano-based enhancement for chronic disease care. IEEE Rev. Biomed. Eng. 2018, 12, 34–71. [Google Scholar] [CrossRef] [PubMed]
- Li, T.H.S.; Su, Y.T.; Lai, S.W.; Hu, J.J. Walking motion generation, synthesis, and control for biped robot by using PGRL, LPI, and fuzzy logic. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 736–748. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.H.Z.; Chen, M.Z.Q.; Chen, Y. When joggers meet robots: The past, present, and future of research on humanoid robots. Bio Des. Manuf. 2019, 2, 108–118. [Google Scholar] [CrossRef]
- Banala, S.K.; Kim, S.H.; Agrawal, S.K.; Scholz, J.P. Robot assisted gait training with active leg exoskeleton (ALEX). IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 2–8. [Google Scholar] [CrossRef]
- Hassan, M.; Kadone, H.; Suzuki, K.; Sankai, Y. Wearable gait measurement system with an instrumented cane for exoskeleton control. Sensors 2014, 14, 1705–1722. [Google Scholar] [CrossRef]
- Ding, S.; Ouyang, X.; Liu, T.; Li, Z.; Yang, H. Gait event detection of a lower extremity exoskeleton robot by an intelligent IMU. IEEE Sens. J. 2018, 18, 9728–9735. [Google Scholar] [CrossRef]
- Leardini, A.; Benedetti, M.G.; Berti, L.; Bettinelli, D.; Nativo, R.; Giannini, S. Rear-foot, mid-foot and fore-foot motion during the stance phase of gait. Gait Posture 2007, 25, 453–462. [Google Scholar] [CrossRef]
- Howell, A.M.; Kobayashi, T.; Hayes, H.A.; Foreman, K.B.; Bamberg, S.J.M. Kinetic gait analysis using a low-cost insole. IEEE Trans. Biomed. Eng. 2013, 60, 3284–3290. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.A.; Cho, S.H.; Lee, J.W.; Lee, K.H.; Yang, H.K. Wearable accelerometer system for measuring the temporal parameters of gait. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 483–486. [Google Scholar] [CrossRef]
- Lin, Z.; Wu, Z.; Zhang, B.; Wang, Y.C.; Guo, H.; Liu, G.; Chen, C.; Chen, Y.; Yang, J.; Wang, Z.L. A triboelectric nanogenerator-based smart insole for multifunctional gait monitoring. Adv. Mater. Technol. 2019, 4, 1–7. [Google Scholar] [CrossRef]
- Joshi, C.D.; Lahiri, U.; Thakor, N.V. Classification of gait phases from lower limb EMG: Application to exoskeleton orthosis. In Proceedings of the IEEE Point-of-Care Healthcare Technologies, Bangalore, India, 16–18 January 2013; pp. 228–231. [Google Scholar] [CrossRef]
- Zheng, E.; Chen, B.; Wang, X.; Huang, Y.; Wang, Q. On the design of a wearable multi-sensor system for recognizing motion modes and sit-to-stand transition. Int. J. Adv. Robot. Syst. 2014, 11, 30. [Google Scholar] [CrossRef]
- Ko, J.; Lu, C.Y.; Srivastava, M.B.; Stankovic, J.A.; Terzis, A.; Welsh, M. Wireless sensor networks for healthcare. Proc. IEEE 2010, 98, 1947–1960. [Google Scholar] [CrossRef]
- Niu, S.; Matsuhisa, N.; Beker, L.; Li, J.; Wang, S.; Wang, J.; Jiang, Y.; Yan, X.; Yun, Y.; Burnett, W.; et al. A wireless body area sensor network based on stretchable passive tags. Nat. Electron. 2019, 2, 361–368. [Google Scholar] [CrossRef]
- Chen, S.; Lach, J.; Lo, B.; Yang, G.Z. Toward pervasive gait analysis with wearable sensors: A systematic review. IEEE J. Biomed. Heal. Inform. 2016, 20, 1521–1537. [Google Scholar] [CrossRef]
- Najafi, B.; Ron, E.; Enriquez, A.; Marin, I.; Razjouyan, J.; Armstrong, D.G. Smarter sole survival: Will neuropathic patients at high risk for ulceration use a smart insole-based foot protection system? J. Diabetes Sci. Technol. 2017, 11, 702–713. [Google Scholar] [CrossRef] [PubMed]
- Malvade, P.S.; Joshi, A.K.; Madhe, S.P. IoT based monitoring of foot pressure using FSR sensor. In Proceedings of the 2017 IEEE International Conference on Communication and Signal Processing, Chennai, India, 6–8 April 2017; pp. 635–639. [Google Scholar] [CrossRef]
- Paredes-Madrid, L.; Fonseca, J.; Matute, A.; Velasquez, E.I.G.; Palacio, C.A. Self-compensated driving circuit for reducing drift and hysteresis in Force Sensing Resistors. Electronics 2018, 7, 146. [Google Scholar] [CrossRef]
- Ishiguro, Y.; Ishikawa, T.; Kojima, K.; Sugai, F.; Nozawa, S.; Kakiuchi, Y.; Okada, K.; Inaba, M. Online master-slave footstep control for dynamical human-robot synchronization with wearable sole sensor. In Proceedings of the IEEE-RAS 16th International Conference on Humanoid Robots, Cancun, Mexico, 15–17 November 2016; pp. 864–869. [Google Scholar] [CrossRef]
- Yuan, C.; Luo, L.P.; Yuan, Q.; Wu, J.; Yan, R.J.; Kim, H.; Shin, K.S.; Han, C.S. Development and evaluation of a compact 6-axis force/moment sensor with a serial structure for the humanoid robot foot. Measurement 2015, 70, 110–122. [Google Scholar] [CrossRef]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 6, 2345–2352. [Google Scholar] [CrossRef] [PubMed]
- Sanli, A.; Benchirouf, A.; Muller, C.; Kanoun, O. Piezoresistive performance characterization of strain sensitive multi-walled carbon nanotube-epoxy nanocomposites. Sens. Actuators A Phys. 2017, 254, 61–68. [Google Scholar] [CrossRef]
- Wang, L.H. Piezoresistive sensor based on conductive polymer composite with transverse electrodes. IEEE Trans. Electron Devices 2015, 62, 1299–1305. [Google Scholar] [CrossRef]
- Park, H.; Jeong, Y.R.; Yun, J.; Hong, S.Y.; Jin, S.; Lee, S.J.; Zi, G.; Ha, J.S. Stretchable array of highly sensitive pressure sensors consisting of polyaniline nanofibers and Au-coated polydimethylsiloxane micropillars. ACS Nano 2015, 9, 9974–9985. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.; Tinku, S.; Lorenzelli, L.; Dahiya, R.S. Flexible tactile sensors using screen-printed P(VDF-TrFE) and MWCNT/PDMS composites. IEEE Sens. J. 2015, 15, 3146–3155. [Google Scholar] [CrossRef]
- Saito, M.; Nakajima, K.; Takano, C.; Ohta, Y.; Sugimoto, C.; Ezoe, R.; Sasaki, K.; Hosaka, H.; Ifukube, T.; Ino, S.; et al. An in-shoe device to measure plantar pressure during daily human activity. Med. Eng. Phys. 2011, 33, 638–645. [Google Scholar] [CrossRef]
- Krause, A.; Smailagic, A.; Siewiorek, D.P. Context-aware mobile computing: Learning context-dependent personal preferences from a wearable sensor array. IEEE Trans. Mob. Comput. 2006, 5, 113–127. [Google Scholar] [CrossRef] [Green Version]
- LeMoyne, R.; Heerinckx, F.; Aranca, T.; De Jager, R.; Zesicwicz, T.; Saal, H.J. Wearable body and wireless inertial sensors for machine learning classification of gait for people with Friedreich’s ataxia. In Proceedings of the IEEE 13th International Conference on Wearable and Implantable Body Sensor Networks, San Francisco, CA, USA, 14–17 June 2016; pp. 147–151. [Google Scholar] [CrossRef]
- Rawassizadeh, R.; Momeni, E.; Dobbins, C.; Gharibshah, J.; Pazzani, M. Scalable daily human behavioral pattern mining from multivariate temporal data. IEEE Trans. Knowl. Data Eng. 2016, 28, 3098–3112. [Google Scholar] [CrossRef]
- Yu, Z.B.; Niu, X.F.; Liu, Z.T.; Pei, Q.B. Intrinsically stretchable polymer light-emitting devices using carbon nanotube-polymer composite electrodes. Adv. Mater. 2011, 23, 3989–3994. [Google Scholar] [CrossRef]
- Seghir, R.; Arscott, S. Extended PDMS stiffness range for flexible systems. Sens. Actuators A Phys. 2015, 230, 33–39. [Google Scholar] [CrossRef]
- Luo, N.; Dai, W.; Li, C.; Zhou, Z.; Lu, L.; Poon, C.C.Y.; Chen, S.C.; Zhang, Y.; Zhao, N. Flexible piezoresistive sensor patch enabling ultralow power cuffless blood pressure measurement. Adv. Funct. Mater. 2016, 26, 1178–1187. [Google Scholar] [CrossRef]
- Pang, G.; Deng, J.; Wang, F.; Zhang, J.; Pang, Z.; Yang, G. Development of flexible robot skin for safe and natural human-robot collaboration. Micromachines 2018, 9, 576. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crea, S.; Donati, M.; De Rossi, S.M.; Oddo, C.M.; Vitiello, N. A wireless flexible sensorized insole for gait analysis. Sensors 2014, 14, 1073–1093. [Google Scholar] [CrossRef] [Green Version]
- Lind, R.F.; Love, L.J.; Rowe, J.C.; Pin, F.G. Multi-axis foot reaction force/torque sensor for biomedical applications. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2575–2579. [Google Scholar] [CrossRef]
- Chen, G.; Qi, P.; Guo, Z.; Yu, H.Y. Gait-event-based synchronization method for gait rehabilitation robots via a bioinspired adaptive oscillator. IEEE Trans. Biomed. Eng. 2017, 64, 1345–1356. [Google Scholar] [CrossRef]
- Muralidharan, N.; Li, M.Y.; Carter, R.E.; Galioto, N.; Pint, C.L. Ultralow frequency electrochemical-mechanical strain energy harvester using 2D black phosphorus nanosheets. ACS Energy Lett. 2017, 2, 1797–1803. [Google Scholar] [CrossRef]
- Rosenbaum, D.; Becker, H.P. Plantar pressure distribution measurements: Technical background and clinical applications. Foot Ankle Surg. 1997, 3, 1–14. [Google Scholar] [CrossRef]
- Büscher, G.H.; Kõiva, R.; Schürmann, C.; Haschke, R.; Ritter, H.J. Flexible and stretchable fabric-based tactile sensor. Rob. Auton. Syst. 2015, 63, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Muro-de-la-Herran, A.; García-Zapirain, B.; Méndez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [Green Version]
- Perry, J.; Davids, J.R. Gait analysis: Normal and pathological function. J. Pediatr. Orthop. 1992, 12, 815. [Google Scholar] [CrossRef]
- Taborri, J.; Palermo, E.; Rossi, S. Automatic detection of faults in race walking: A comparative analysis of machine-learning algorithms fed with inertial sensor data. Sensors 2019, 19, 1461. [Google Scholar] [CrossRef] [Green Version]
- He, S.B.; Chen, J.M.; Li, X.; Shen, X.M.; Sun, Y.X. Mobility and intruder prior information improving the barrier coverage of sparse sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 1268–1282. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Zhou, Q.; Lei, L.; Zheng, K.; Xiang, W. An IoT-cloud based wearable ECG monitoring system for smart healthcare. J. Med. Syst. 2016, 40, 286. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Ma, Y.; Li, Y.; Wu, D.; Zhang, Y.; Youn, C.-H. Wearable 2.0: Enabling human-cloud integration in next generation healthcare systems. IEEE Commun. Mag. 2017, 55, 54–61. [Google Scholar] [CrossRef]
- Chen, Z.; Klatzky, R.; Siewiorek, D.; Satyanarayanan, M.; Hu, W.; Wang, J.; Zhao, S.; Amos, B.; Wu, G.; Ha, K.; et al. An empirical study of latency in an emerging class of edge computing applications for wearable cognitive assistance. In Proceedings of the Second ACM/IEEE Symposium on Edge Computing, San Jose, CA, USA, 12–14 October 2017; p. 14. [Google Scholar] [CrossRef] [Green Version]
- Rawassizadeh, R.; Pierson, T.J.; Peterson, R.; Kotz, D. NoCloud: Exploring network disconnection through on-device data analysis. IEEE Pervas. Comput. 2018, 17, 64–74. [Google Scholar] [CrossRef]
- Shi, L.; Duan, F.; Yang, Y.; Sun, Z. The effect of treadmill walking on gait and upper trunk through linear and nonlinear analysis methods. Sensors 2019, 19, 2204. [Google Scholar] [CrossRef] [PubMed] [Green Version]


| Sensor Type | Authors | Design Features | References |
|---|---|---|---|
| Optoelectronic sensors | Crea et al. | An insole with shading structures used optoelectronic signal to detect pressure | [38] |
| Inertial sensors | Ding et al. | The inertial measurement unit was attached onto the anterior surface of a shoe and measured the three-axis angular velocity and the acceleration of the foot | [10] |
| Electromyography (EMG) sensors | Joshi et al. | The reflective markers were attached on limbs to detect the EMG signal | [15] |
| Multi-axis force sensors | Lind et al. | Unique multi-axis foot force/torque sensors were integrated into a military style boot to measure the forces on the human foot | [39] |
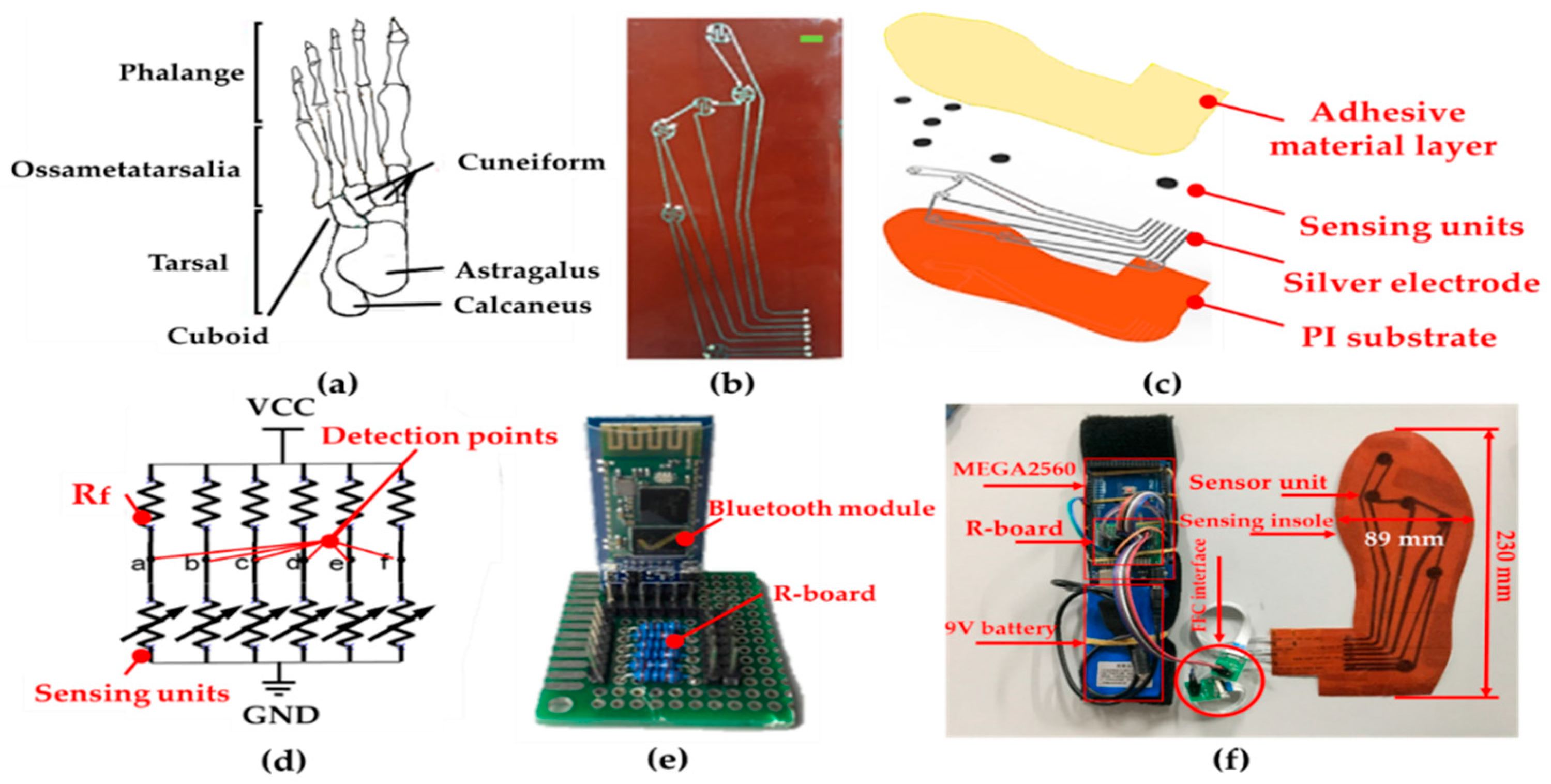
| Conductive rubbers | Saito et al. | The flexible conductive rubber sensors were fixed to the insole with traditional circuit for electrical connection | [30] |
| Our work | Conductive rubber sensors processed by laser cutting were fixed on flexible insoles. |
| Items | Parameters | Test Conditions |
|---|---|---|
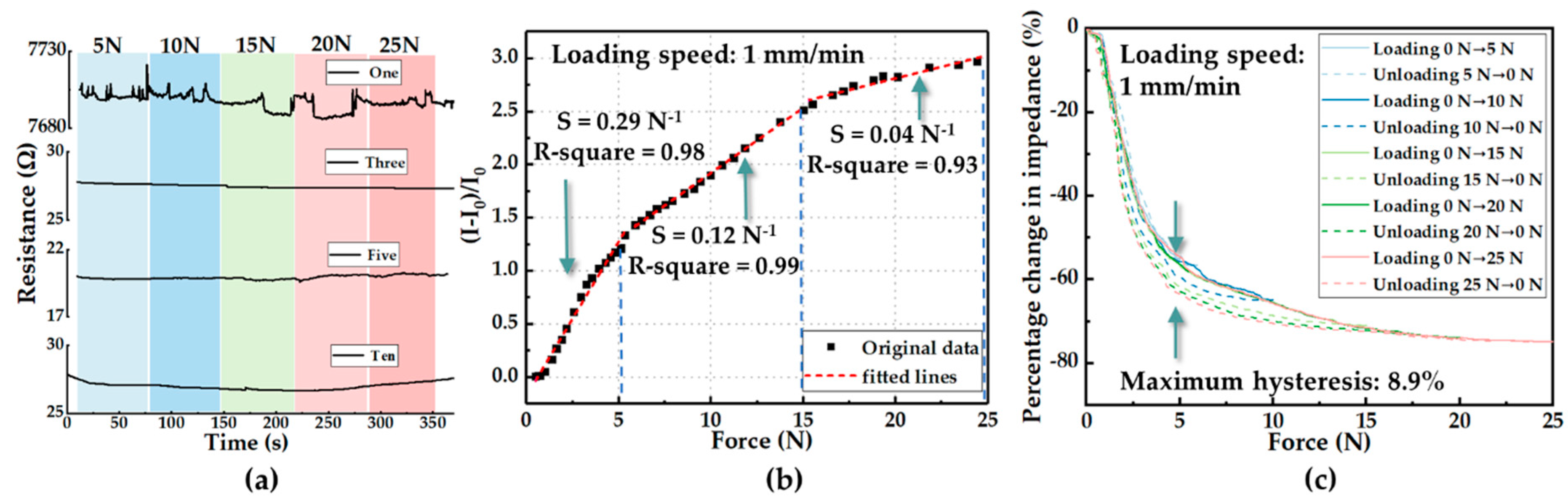
| Detection range | 0–25 N | Loading speed of 1 mm/min |
| Nonlinear errors | 10.4% | Loading range of 0–5 N at a speed of 1 mm/min |
| 1.0% | Loading range of 5–15 N at a speed of 1 mm/min | |
| 2.8% | Loading range of 15–25 N at a speed of 1 mm/min | |
| Sensitivity | 0.29 N−1 (3.63 MPa−1) | Loading range of 0–5 N at a speed of 1 mm/min |
| 0.12 N−1 (1.5 MPa−1) | Loading range of 5–15 N at a speed of 1 mm/min | |
| 0.04 N−1 (0.5 MPa−1) | Loading range of 15–25 N at a speed of 1 mm/min | |
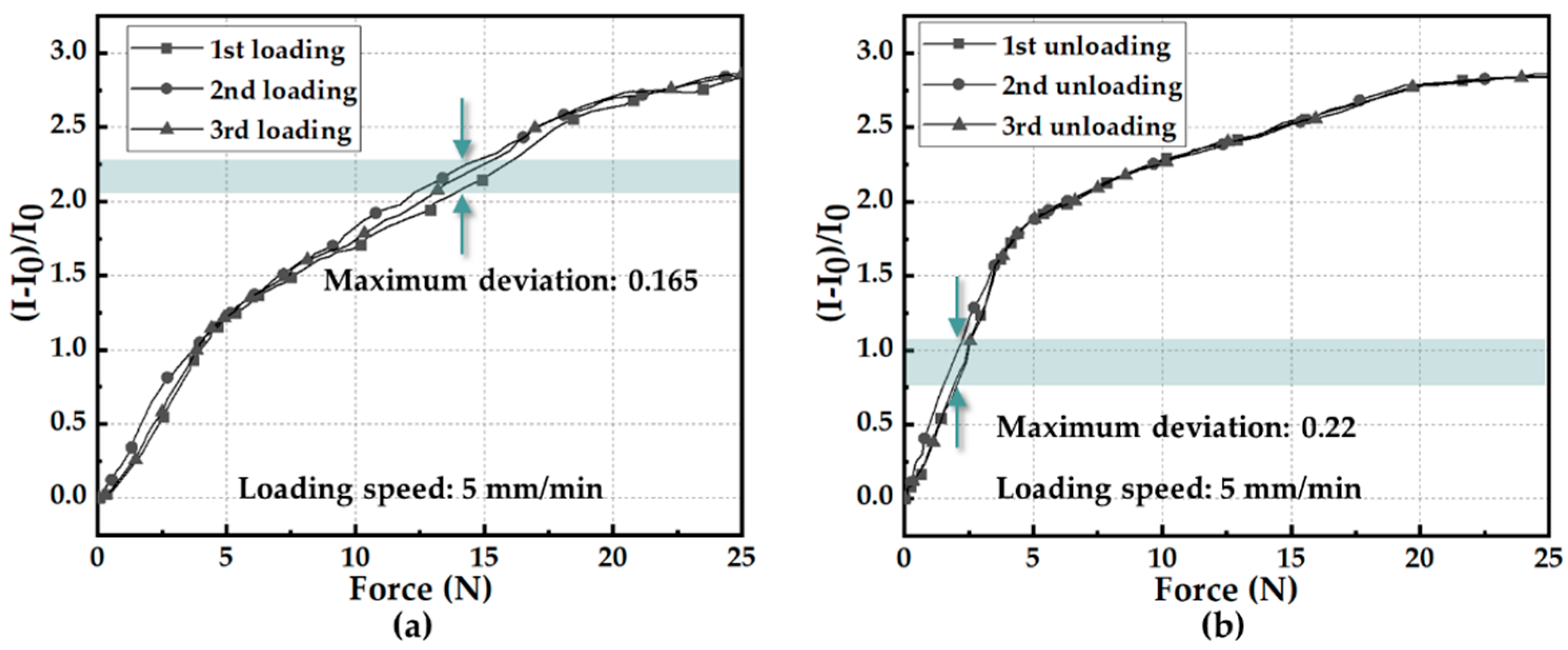
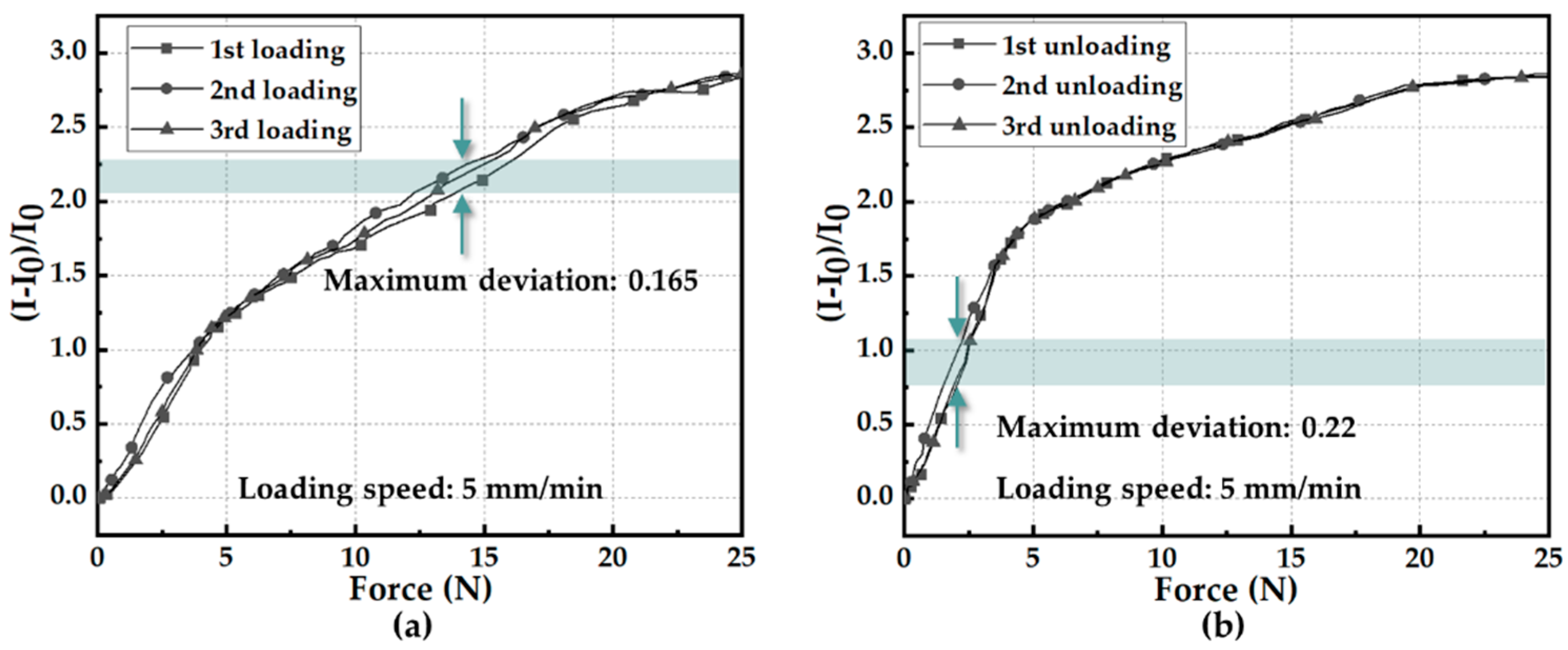
| Repeatability | 5.9% | Loading range of 0–25 N at a speed of 5 mm/min |
| 7.9% | Unloading range of 0–25 N at a speed of 5 mm/min | |
| Hysteresis | 8.9% | Cyclic force range of 0–25 N at a speed of 1 mm/min |
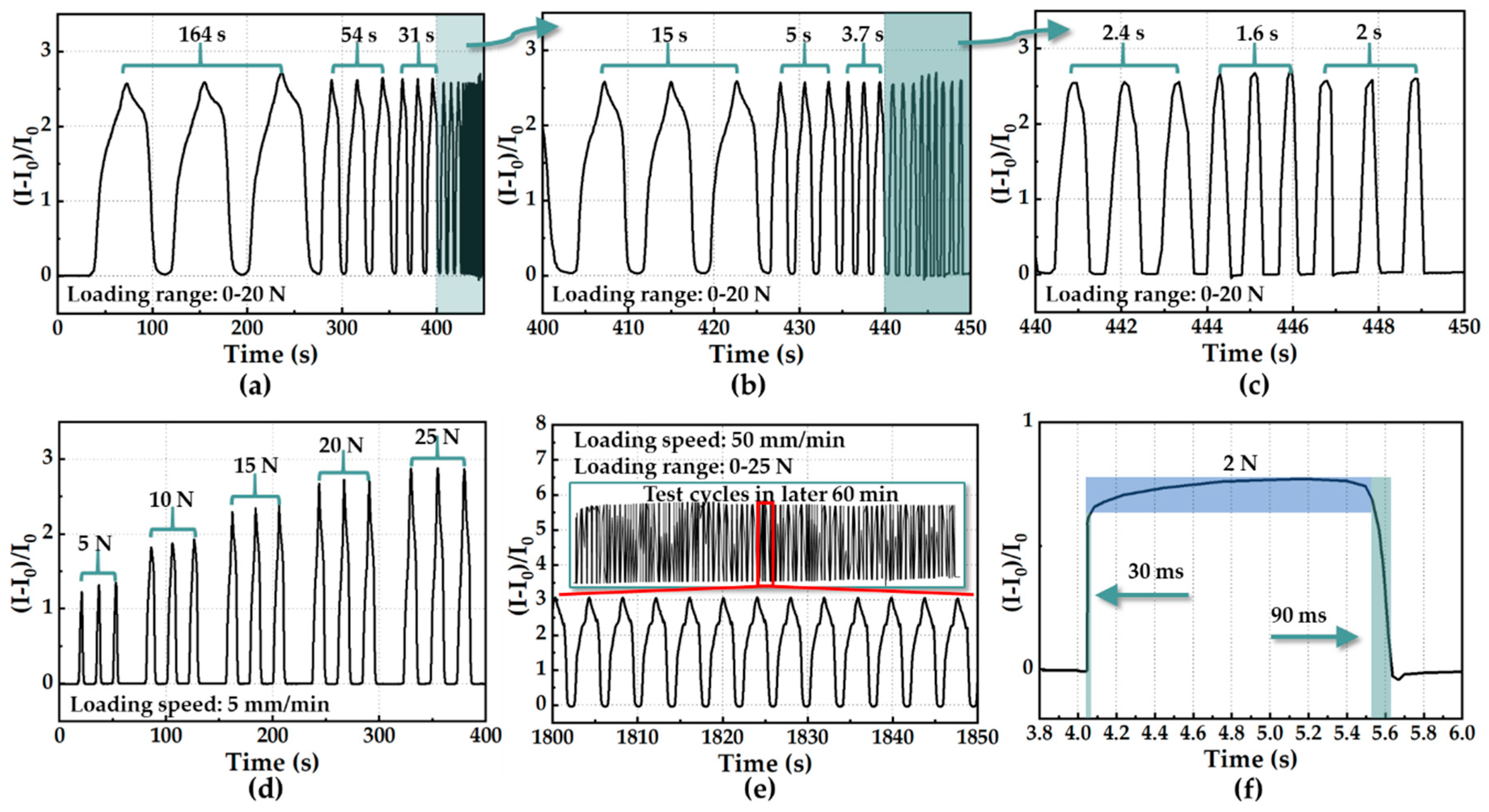
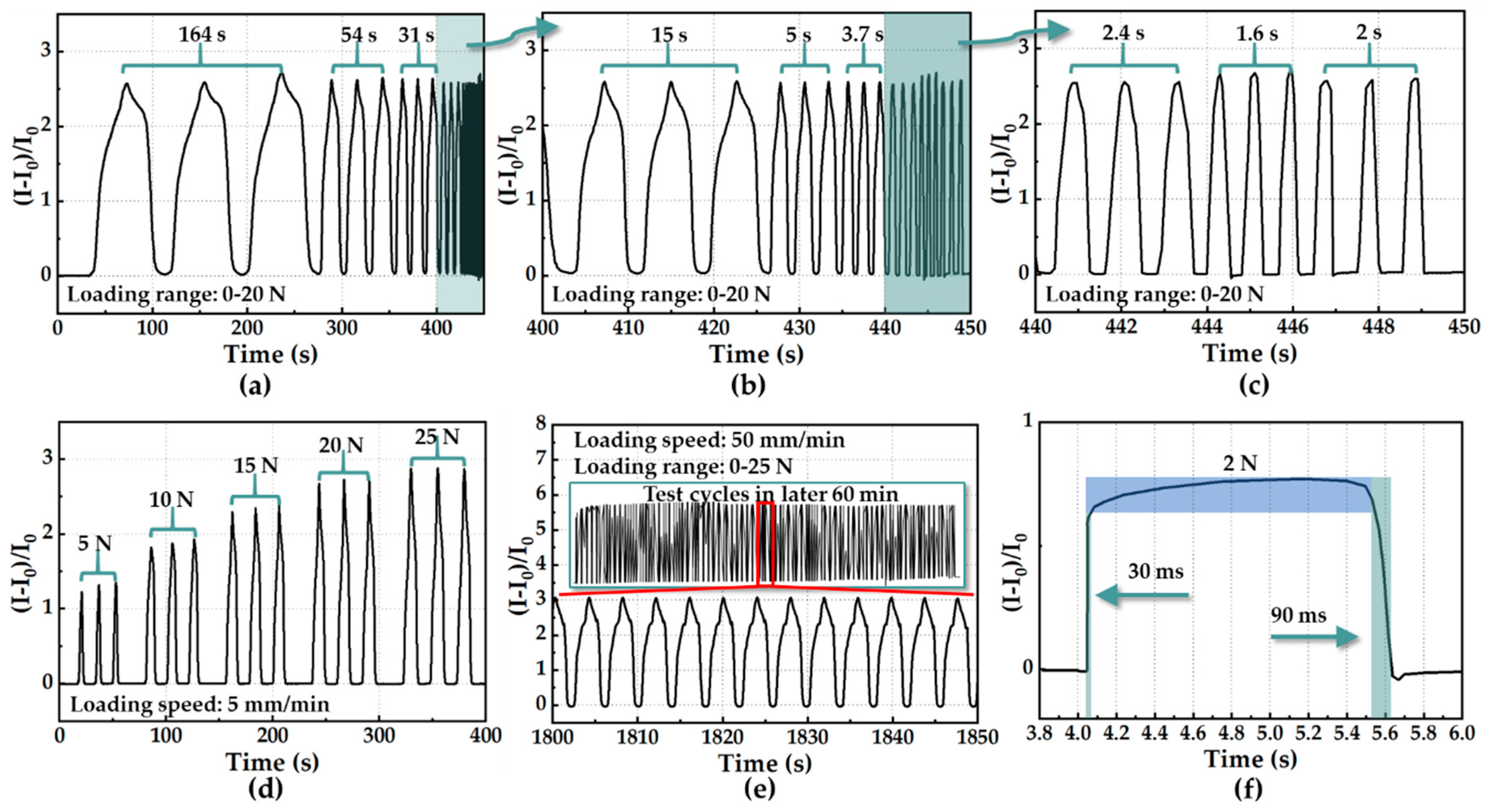
| Frequency response | 0.012–1.25 Hz | Loading range of 0–20 N |
| Durability | 5000 cycles | Loading range of 0–25 N at a speed of 50 mm/min |
| Response time | 30 ms | Transient test (from 0 N to 2 N) |
| Recovery time | 90 ms | Transient test (from 2 N to 0 N) |
| Volunteer Number | Gender | Weight (kg) | Height (m) | BMI (kg/m2) |
|---|---|---|---|---|
| #1 | Male | 70 | 1.72 | 23.7 |
| #2 | Male | 60 | 1.81 | 18.3 |
| #3 | Female | 51 | 1.61 | 19.6 |
| #4 | Female | 54 | 1.55 | 22.4 |
| #5 | Male | 65 | 1.76 | 20.9 |
| Volunteer Number | Stride Frequency (Hz) | Stride Time (s) | Overall Accuracy (%) | Precision (%) | F1-Score | ||||
|---|---|---|---|---|---|---|---|---|---|
| Phase 1 | Phase 2 | Phase 3 | Phase 1 | Phase 2 | Phase 3 | ||||
| #1 | 1.18 | 1.7 | 98.000 | 100.000 | 100.000 | 95.745 | 1.000 | 0.957 | 0.978 |
| #2 | 1.12 | 1.8 | 96.000 | 100.000 | 100.000 | 91.667 | 1.000 | 0.933 | 0.857 |
| #3 | 1.26 | 1.6 | 92.000 | 92.308 | 100.000 | 80.000 | 0.923 | 0.933 | 0.889 |
| #4 | 1.34 | 1.5 | 88.000 | 92.308 | 60.000 | 100.00 | 0.923 | 0.750 | 0.875 |
| #5 | 1.26 | 1.6 | 91.667 | 100.000 | 100.000 | 87.500 | 1.000 | 0.667 | 0.933 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heng, W.; Pang, G.; Xu, F.; Huang, X.; Pang, Z.; Yang, G. Flexible Insole Sensors with Stably Connected Electrodes for Gait Phase Detection. Sensors 2019, 19, 5197. https://doi.org/10.3390/s19235197
Heng W, Pang G, Xu F, Huang X, Pang Z, Yang G. Flexible Insole Sensors with Stably Connected Electrodes for Gait Phase Detection. Sensors. 2019; 19(23):5197. https://doi.org/10.3390/s19235197
Chicago/Turabian StyleHeng, Wenzheng, Gaoyang Pang, Feihong Xu, Xiaoyan Huang, Zhibo Pang, and Geng Yang. 2019. "Flexible Insole Sensors with Stably Connected Electrodes for Gait Phase Detection" Sensors 19, no. 23: 5197. https://doi.org/10.3390/s19235197
APA StyleHeng, W., Pang, G., Xu, F., Huang, X., Pang, Z., & Yang, G. (2019). Flexible Insole Sensors with Stably Connected Electrodes for Gait Phase Detection. Sensors, 19(23), 5197. https://doi.org/10.3390/s19235197