An Empirical Study on V2X Enhanced Low-Cost GNSS Cooperative Positioning in Urban Environments †


Abstract
1. Introduction
- Safety-Critical Applications (SCA) (also referred to as Safety of Life, SoL) can potentially cause harm to humans, damage the environment or lead to the destruction of the system itself. For road transportation HAD functions or ADAS are prominent examples. Requirements in terms of GNSS performance parameters such as accuracy, availability and integrity are obviously very strict.
- Liability-Critical Applications (LCA) were first introduced in Reference [4] and further discussed in Reference [5]. LCA can lead to economic or legal consequences if undetected miss-performances occur. Example applications include GNSS road tolling, fleet management, pay as you drive insurances or law enforcement. These types of applications are technologically enabled by SCA as they provide the necessary GNSS quality of service (QoS) for LCA.
- Non-Critical Applications (NCA) are not connected to any kind of health, legal or economic risks for users and their environment. This also leads to less strict performance requirements compared to SCA and LCA. Popular applications are navigational tasks on consumer level.
2. Fundamentals
2.1. V2X Communication
- Safety-critical
- –
- Emergency vehicle warning and prioritization at intersections
- –
- Vulnerable road user warning
- –
- Wrong-way driver detection
- –
- Cooperative trajectory planing, platooning and collision avoidance
- –
- Infrastructure and roadwork warning
- Non-safety-critical
- –
- Traffic light optimal speed advisory
- –
- Electronic road pricing
- –
- Infotainment applications
- –
- Cooperative positioning
2.1.1. GNSS Fundamentals
2.1.2. GNSS Accuracy Assessment
- Position domain
- Measurement domain
- Satellite constellation domain
2.2. Cooperative Positioning
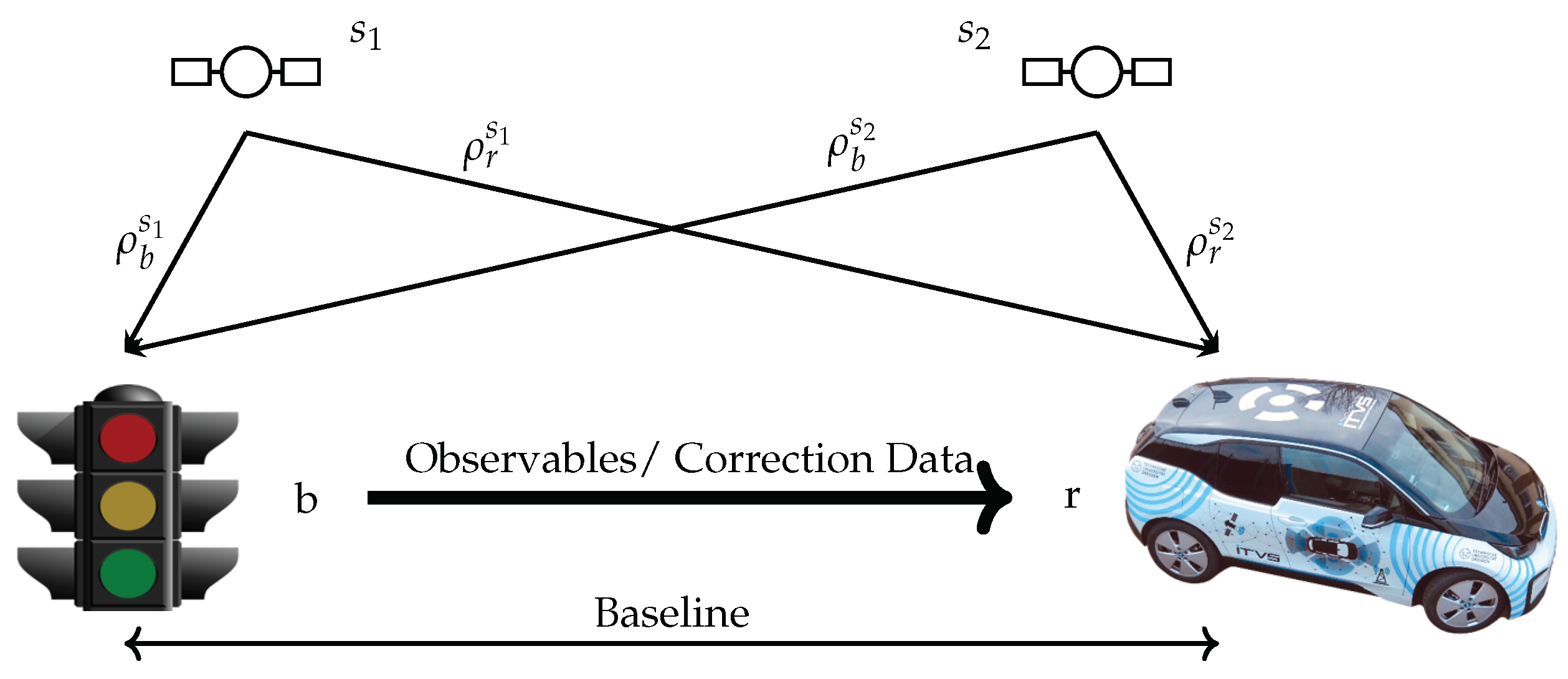
- Between receiver differencing (BRD)
- –
- Fixed base station
- –
- Moving base station
- –
- Fixed baseline
- Between satellite differencing (BSD)
2.2.1. Single Differencing
2.2.2. Double Differencing
2.2.3. CP Summary
2.3. Implementation Aspects & Filter Design
3. Results & Discussion
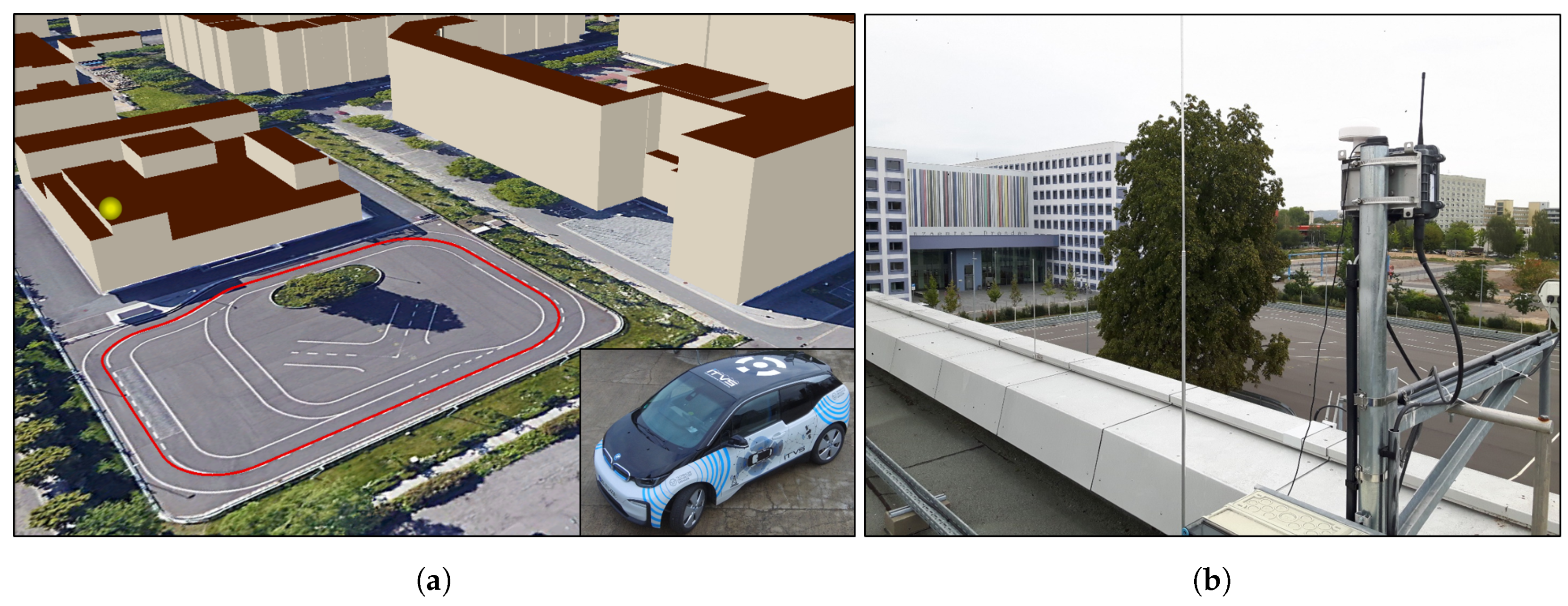
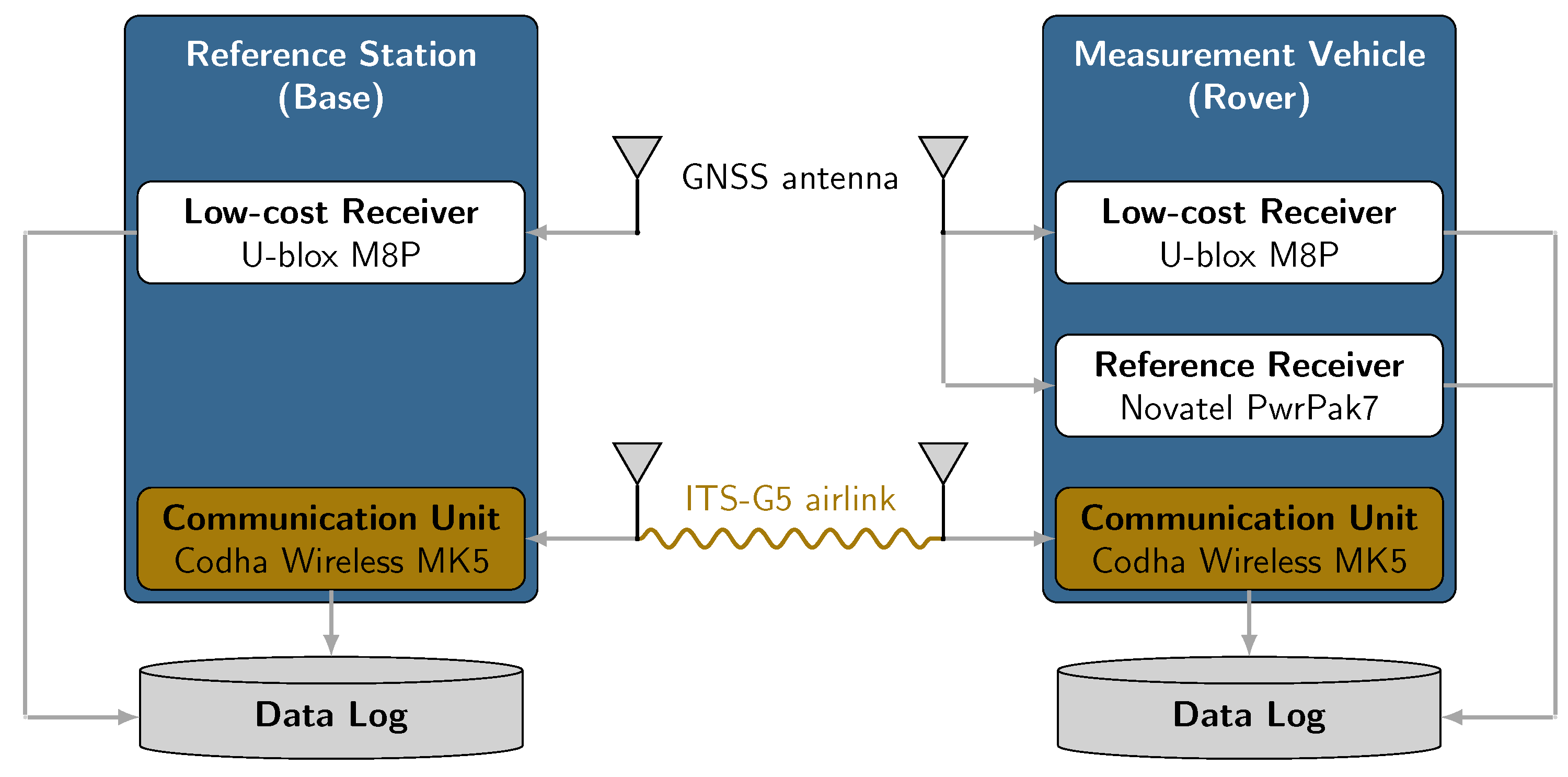
3.1. Data Foundation
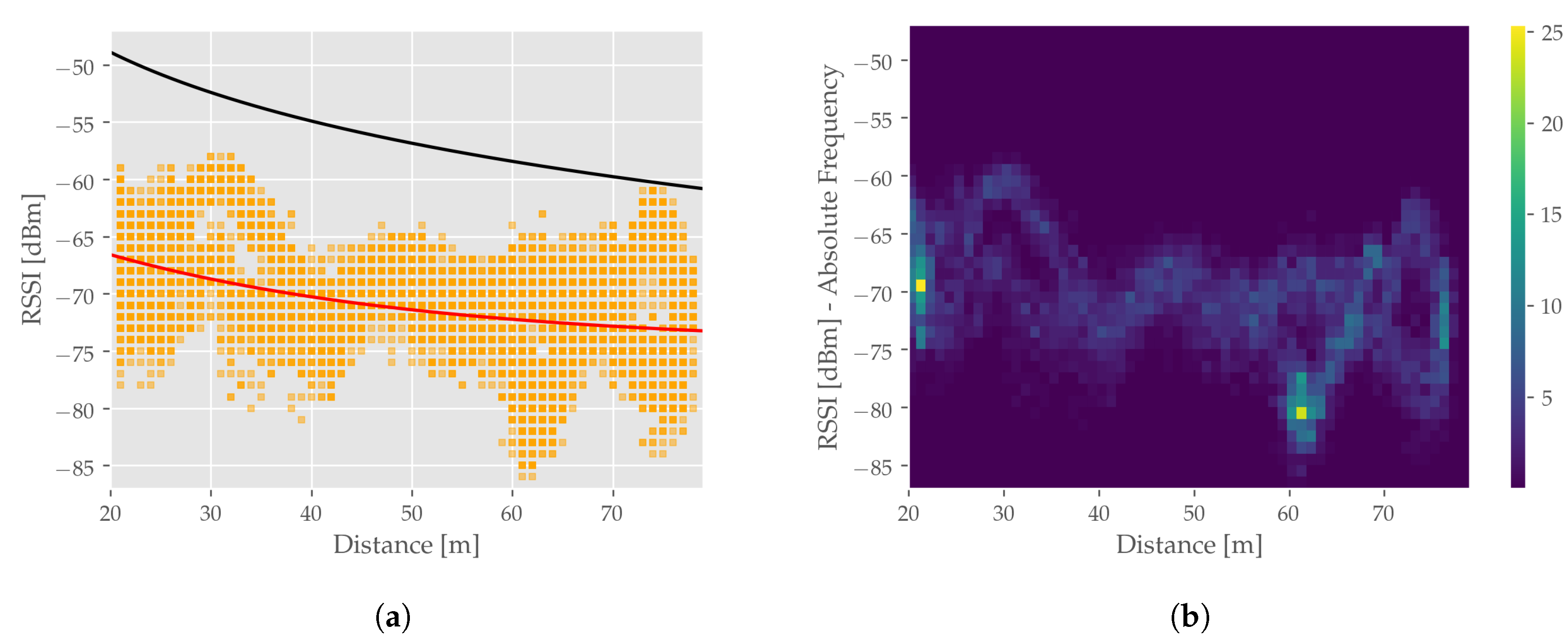
3.2. V2X Communication
3.3. GNSS Positioning Performance
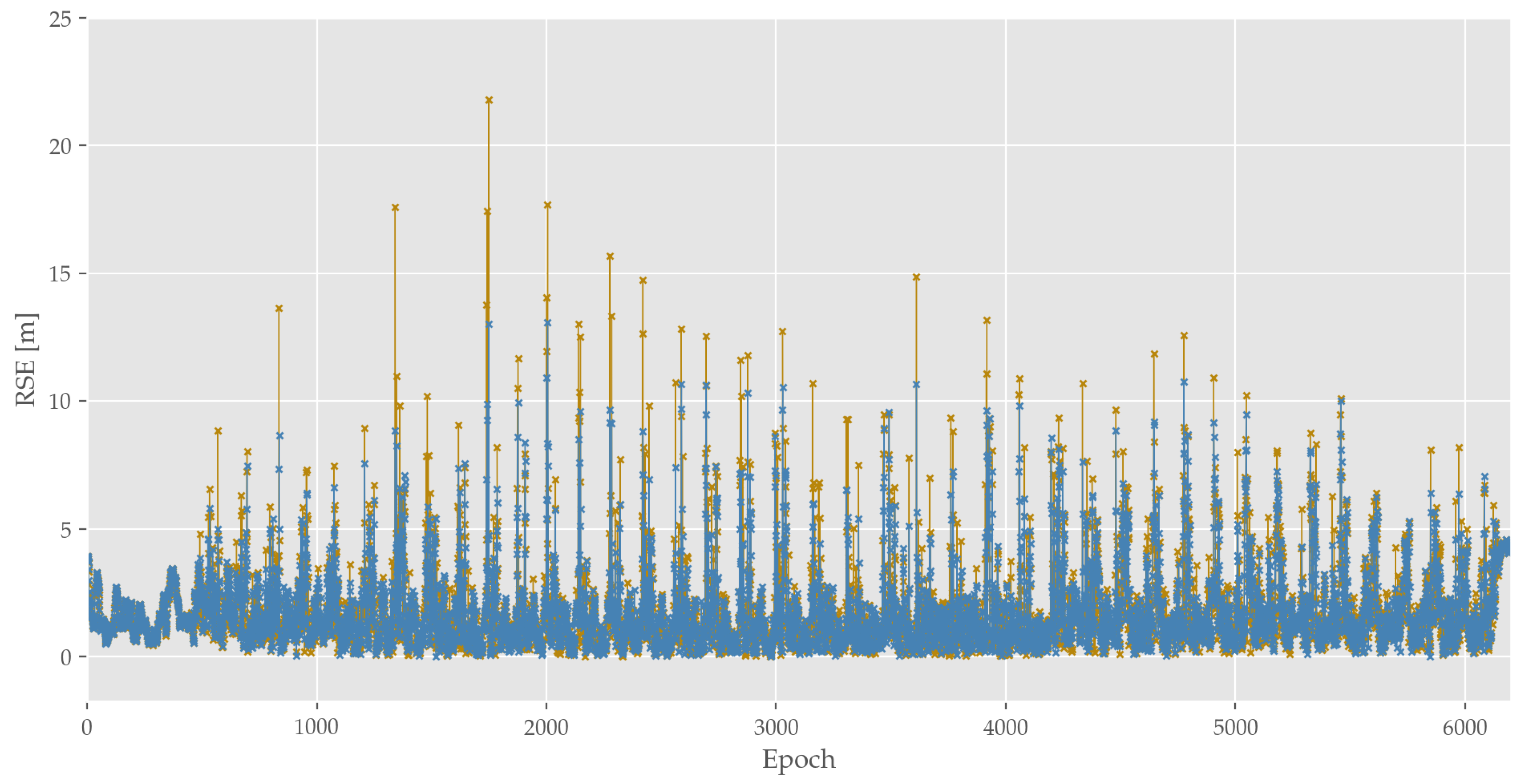
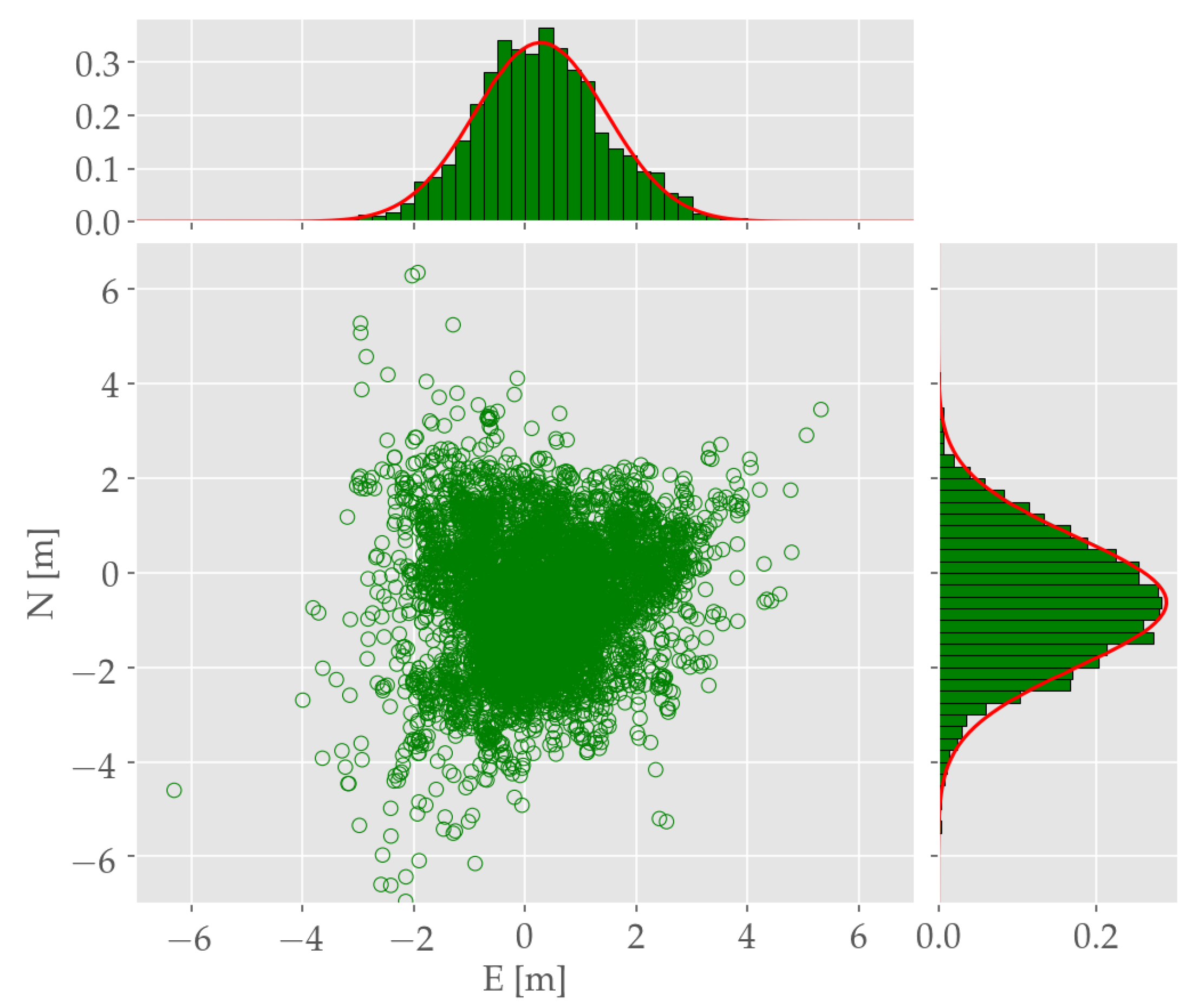
3.3.1. Single Positioning
- In accordance to the assumption that the base station’s observations must not be strained by multipath influences in order to serve as unbiased reference.
- As indicated in Table 2 variance propagation in dependence on the amount of differencing steps is performed. Therefore, base variance is highly influential on CP accuracy performance.
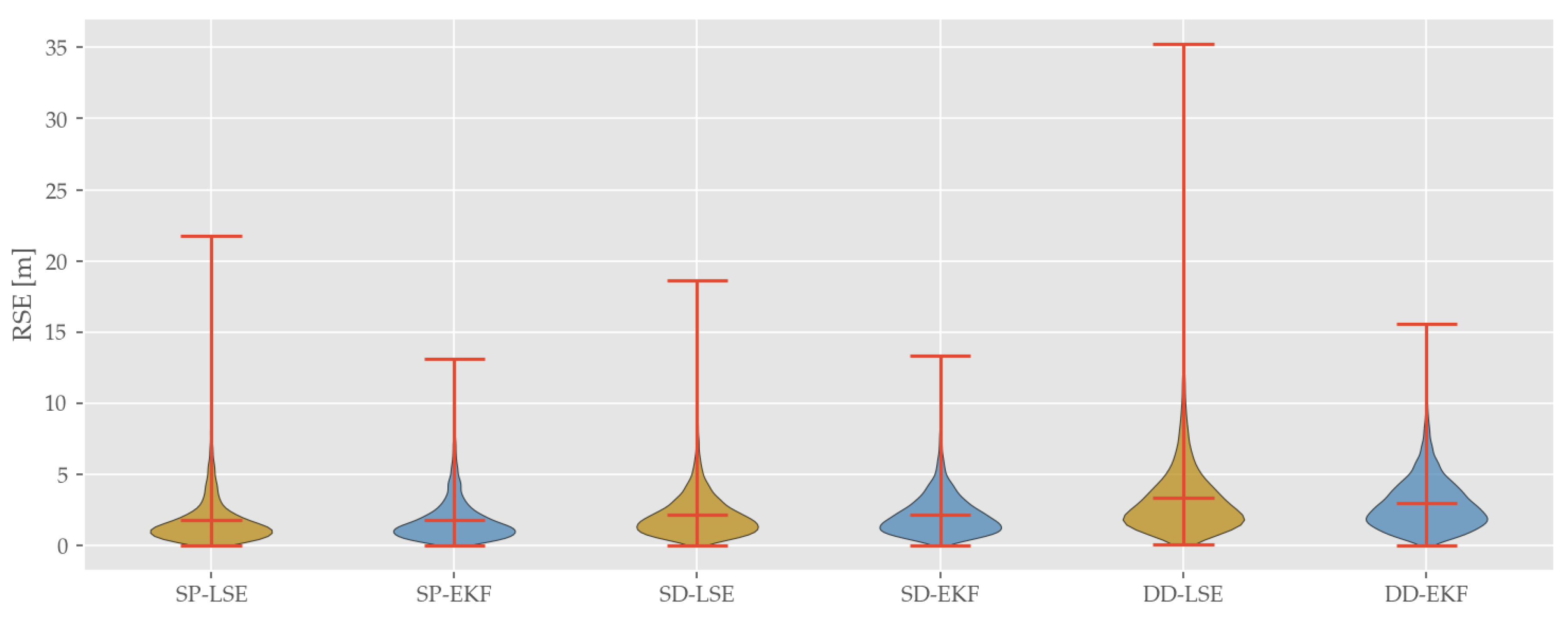
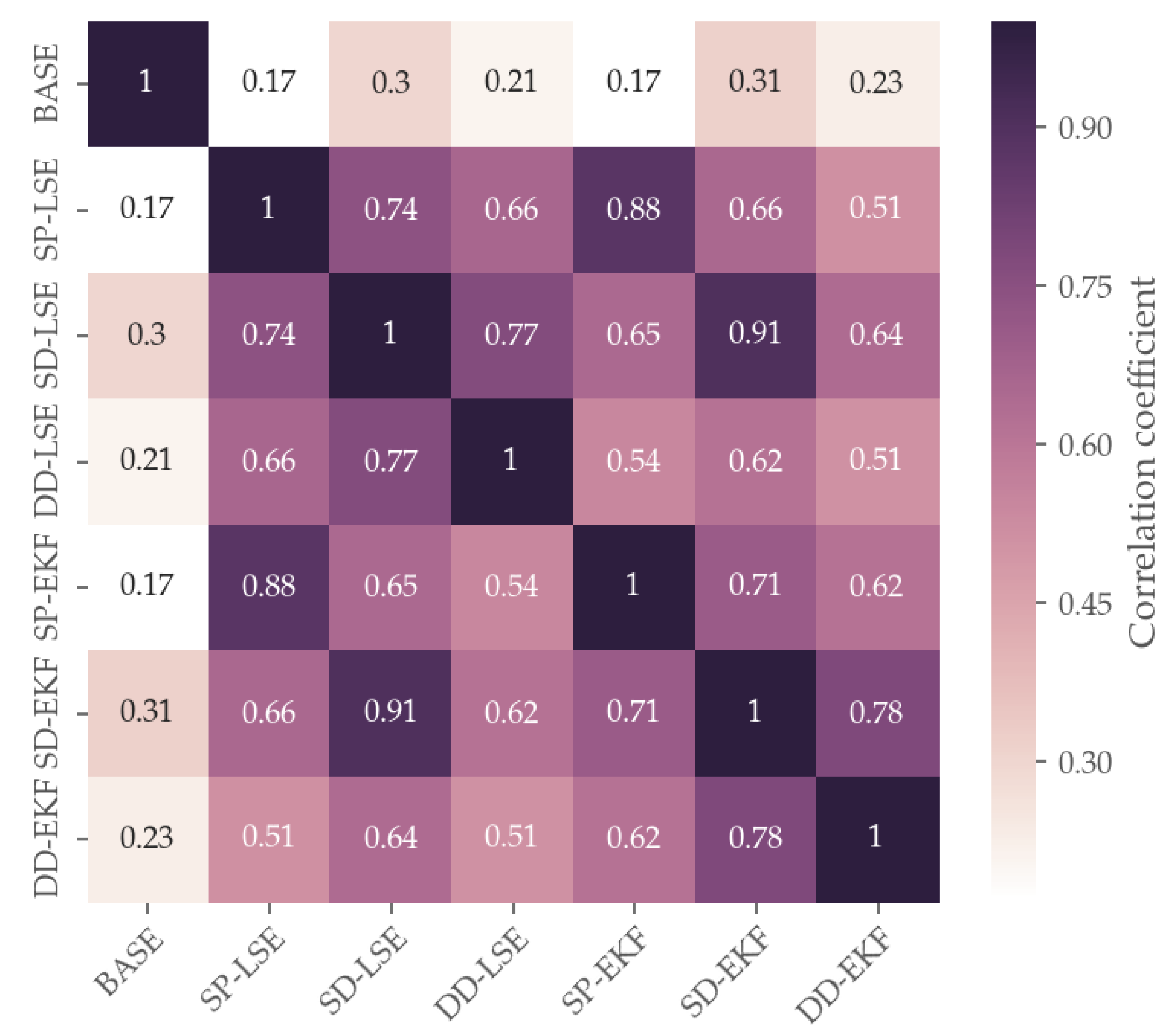
3.3.2. Cooperative Positioning
- EKF yield lower RMSE as well as lower outliers compared to their respective LSE counterpart
- Differencing inducts a higher mean and median error as well as a higher error variance
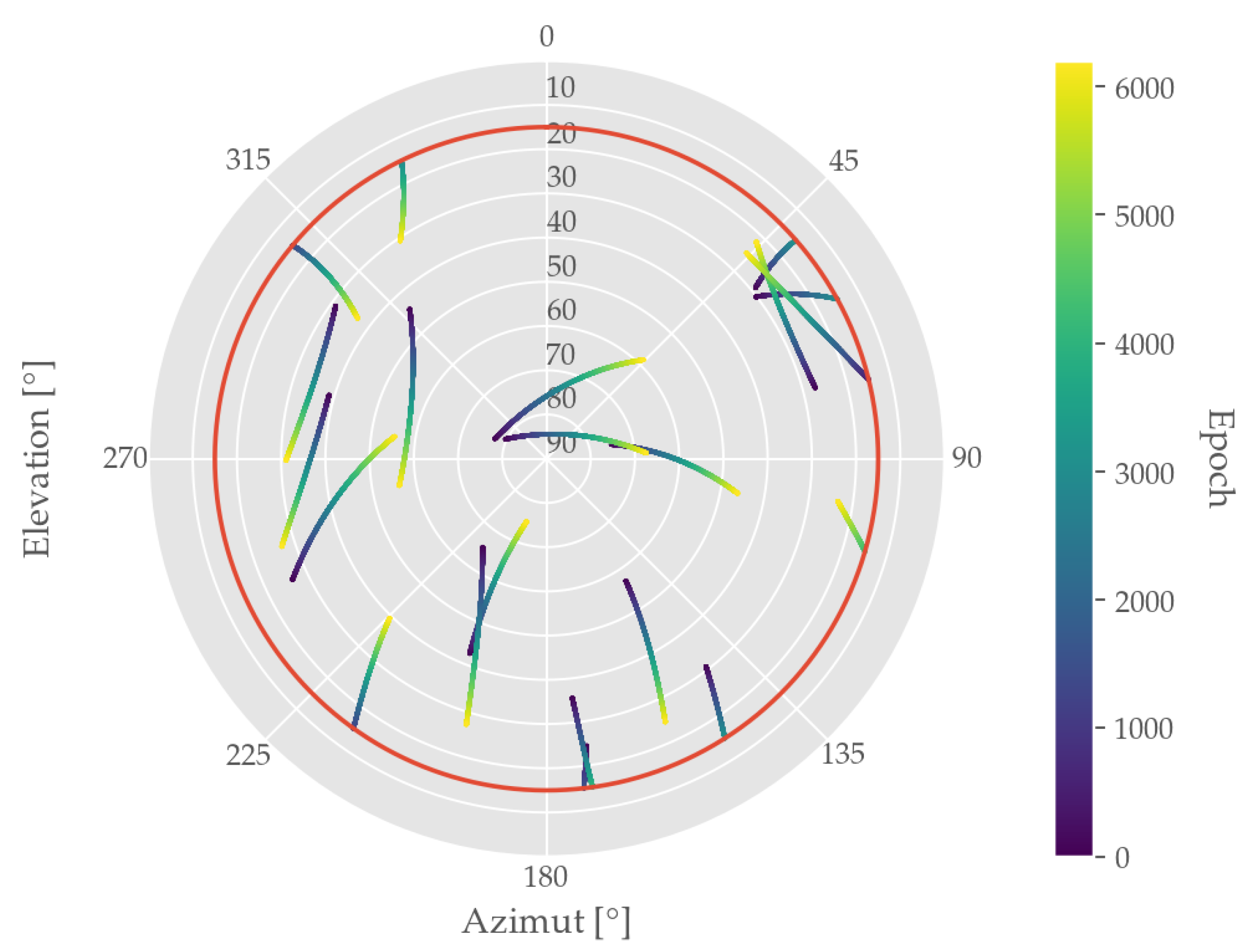
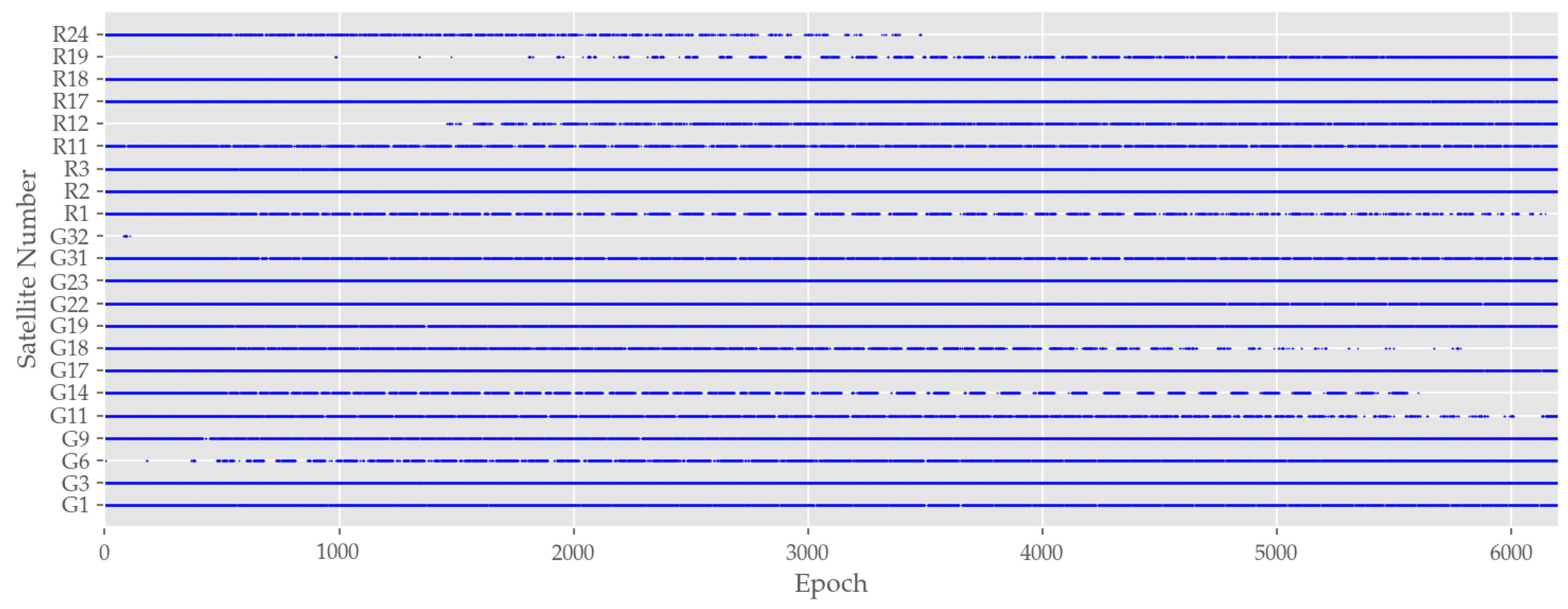
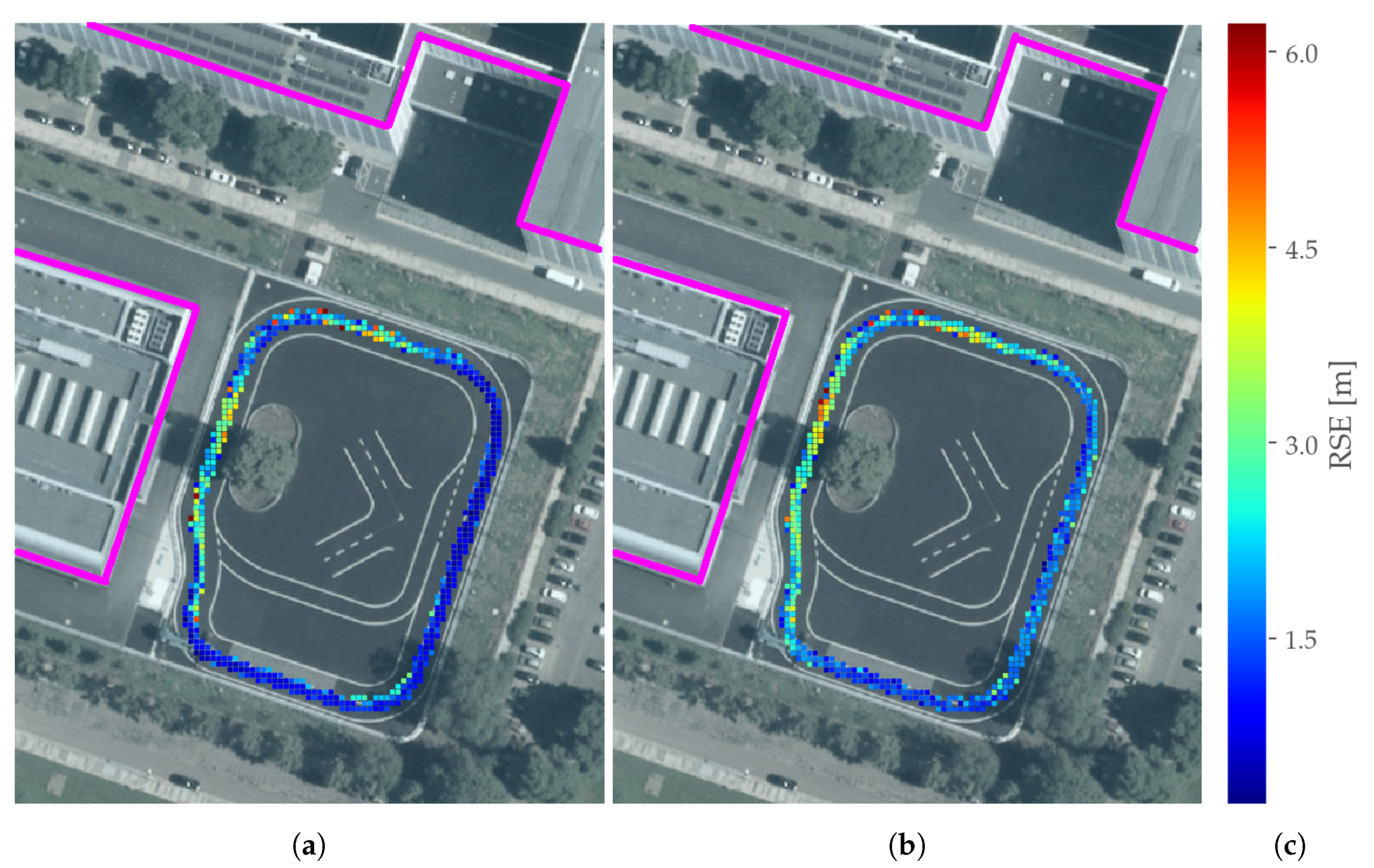
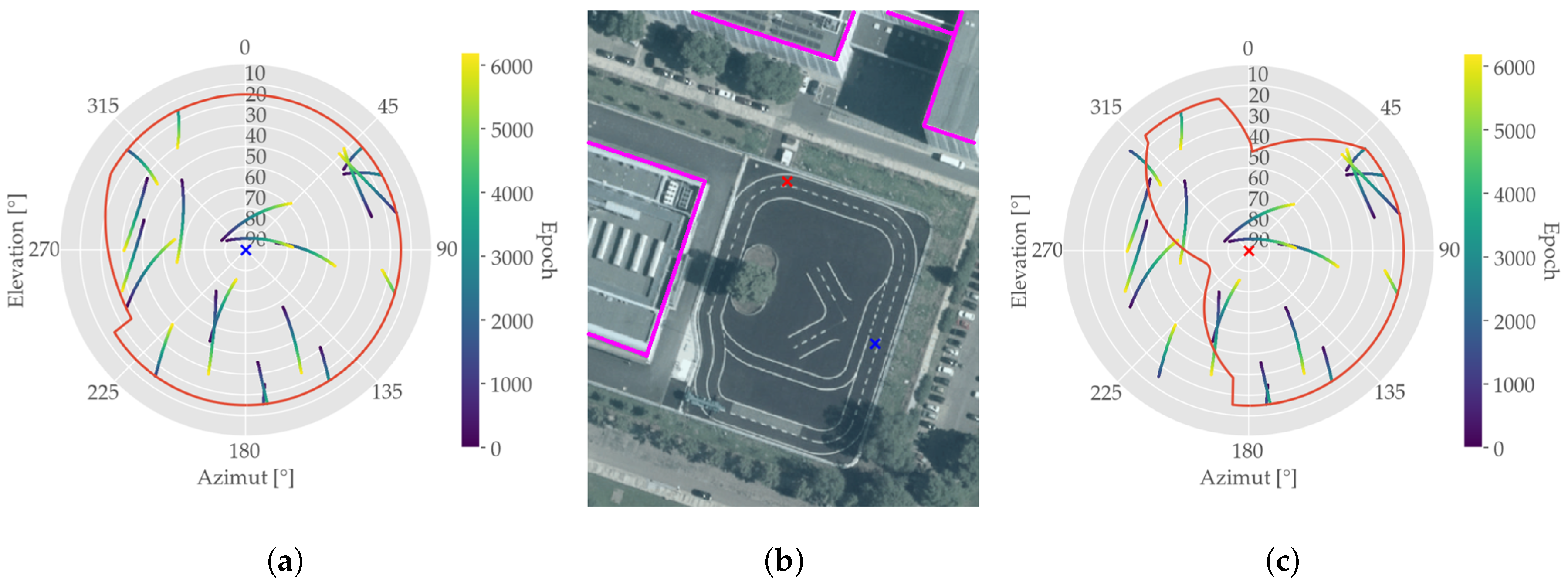
3.4. Visibility and NLoS Analysis
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hobert, L.; Festag, A.; Llatser, I.; Altomare, L.; Visintainer, F.; Kovacs, A. Enhancements of V2X communication in support of cooperative autonomous driving. IEEE Commun. Mag. 2015, 53, 64–70. [Google Scholar] [CrossRef]
- Steiniger, S.; Neun, M.; Edwardes, A. Foundations of Location Based Services; University of Zurich, ETH Zurich: Zurich, Switzerland, 2006. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Beech, T.W.; Martinez-Olague, M.A.; Cosmen-Schortmann, J. Integrity: A Key Enabler for Liability Critical Applications. In Proceedings of the 61st Annual Meeting of The Institute of Navigation (2005), Cambridge, UK, 27–29 June 2005; pp. 1–10. [Google Scholar]
- Cosmen-Schortmann, J.; Azaola-Saenz, M.; Martinez-Olague, M.; Toledo-Lopez, M. Integrity in urban and road environments and its use in liability critical applications. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008. [Google Scholar] [CrossRef]
- Ansari, K.; Naghavi, H.S.; Tian, Y.C.; Feng, Y. Requirements and Complexity Analysis of Cross-Layer Design Optimization for Adaptive Inter-vehicle DSRC. In Proceedings of the International Conference on Mobile, Secure, and Programmable Networking, Paris, France, 29–30 June 2017; pp. 122–137. [Google Scholar]
- Shladover, S.E.; Tan, S.K. Analysis of Vehicle Positioning Accuracy Requirements for Communication-Based Cooperative Collision Warning. J. Intell. Transp. Syst. 2006, 10, 131–140. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.A.; Toth, C.K.; Moore, T.; Raquet, J.F.; Miller, M.M.; Kealy, A. Multisensor Navigation Systems: A Remedy for GNSS Vulnerabilities? Proc. IEEE 2016, 104, 1339–1353. [Google Scholar] [CrossRef]
- Toledo-Moreo, R.; Zamora-Izquierdo, M.A.; Ubeda-Minarro, B.; Gómez-Skarmeta, A.F. High-integrity IMM-EKF-based road vehicle navigation with low-cost GPS/SBAS/INS. IEEE Trans. Intell. Transp. Syst. 2007, 8, 491–511. [Google Scholar] [CrossRef]
- de Ponte Müller, F. Cooperative Relative Positioning for Vehicular Environments. Ph.D. Thesis, University of Passau, Passau, Germany, 2018. [Google Scholar]
- de Ponte Müller, F.; Diaz, E.M.; Kloiber, B.; Strang, T. Bayesian cooperative relative vehicle positioning using pseudorange differences. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS, Monterey, CA, USA, 5–8 May 2014; pp. 434–444. [Google Scholar]
- Alam, N.; Balaei, A.T.; Dempster, A.G. Relative positioning enhancement in VANETs: A tight integration approach. IEEE Trans. Intell. Transp. Syst. 2012, 14, 47–55. [Google Scholar] [CrossRef]
- de Ponte Müller, F.; Navarro Tapia, D.; Kranz, M. Precise relative positioning of vehicles with on-the-fly carrier phase resolution and tracking. Int. J. Distrib. Sens. Netw. 2015, 11, 459142. [Google Scholar] [CrossRef]
- Martin, S.; Travis, W.; Bevly, D. Performance comparison of single and dual frequency closely coupled gps/ins relative positioning systems. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 544–551. [Google Scholar]
- Ahmed, H.; Tahir, M. Terrain-based vehicle localization using low cost MEMS-IMU sensors. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Godha, S.; Cannon, M. GPS/MEMS INS integrated system for navigation in urban areas. Gps Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Olivares-Mendez, M.; Sanchez-Lopez, J.; Jimenez, F.; Campoy, P.; Sajadi-Alamdari, S.; Voos, H. Vision-based steering control, speed assistance and localization for inner-city vehicles. Sensors 2016, 16, 362. [Google Scholar] [CrossRef]
- Im, J.H.; Im, S.H.; Jee, G.I. Vertical corner feature based precise vehicle localization using 3D LIDAR in urban area. Sensors 2016, 16, 1268. [Google Scholar] [CrossRef]
- Levinson, J.; Montemerlo, M.; Thrun, S. Map-based precision vehicle localization in urban environments. In Robotics: Science and Systems; Georgia Institute of Technology: Atlanta, GA, USA, 2007; Volume 4, p. 1. [Google Scholar]
- Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. Map-Matching in Complex Urban Road Networks; Universidade Federal de Uberlandia: Uberlandia, Brazil, 2003. [Google Scholar]
- de Ponte Muller, F.; Diaz, E.M.; Rashdan, I. Cooperative infrastructure-based vehicle positioning. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Jiménez, F.; Monzón, S.; Naranjo, J. Definition of an enhanced map-matching algorithm for urban environments with poor GNSS signal quality. Sensors 2016, 16, 193. [Google Scholar] [CrossRef]
- Zhang, G.; Wen, W.; Hsu, L.T. A novel GNSS based V2V cooperative localization to exclude multipath effect using consistency checks. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018. [Google Scholar] [CrossRef]
- Adjrad, M.; Groves, P.D.; Quick, J.C.; Ellul, C. Performance assessment of 3D-mapping-aided GNSS part 2: Environment and mapping. Navigation 2019. [Google Scholar] [CrossRef]
- Zhang, G.; Wen, W.; Hsu, L.T. Rectification of GNSS-based collaborative positioning using 3D building models in urban areas. GPS Solut. 2019, 23, 83. [Google Scholar] [CrossRef]
- El Assaad, A.; Krug, M.; Fischer, G. Highly Accurate Distance Estimation Using Spatial Filtering and GNSS in Urban Environments. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Gao, Y.; Meng, X.; Hancock, C.; Stephenson, S.; Zhang, Q. UWB/GNSS-based cooperative positioning method for V2X applications. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Kakkavas, A.; Castaneda Garcia, M.H.; Stirling-Gallacher, R.A.; Nossek, J.A. Multi-Array 5G V2V Relative Positioning: Performance Bounds. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Ou, C.H. A roadside unit-based localization scheme for vehicular ad hoc networks. Int. J. Commun. Syst. 2014, 27, 135–150. [Google Scholar] [CrossRef]
- Wu, D.; Arkhipov, D.I.; Zhang, Y.; Liu, C.H.; Regan, A.C. Online war-driving by compressive sensing. IEEE Trans. Mob. Comput. 2015, 14, 2349–2362. [Google Scholar] [CrossRef]
- Speth, T.; Riebl, R.; Brandmeier, T.; Facchi, C.; Al-Bayatti, A.H.; Jumar, U. Enhanced Inter-Vehicular relative positioning. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar] [CrossRef]
- Ansari, K. Cooperative Position Prediction: Beyond Vehicle-to-Vehicle Relative Positioning. IEEE Trans. Intell. Transp. Syst. 2019. [Google Scholar] [CrossRef]
- Wan, G.; Yang, X.; Cai, R.; Li, H.; Zhou, Y.; Wang, H.; Song, S. Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 4670–4677. [Google Scholar]
- Schwarzbach, P.; Reichelt, B.; Michler, O.; Richter, P.; Trautmann, T. Cooperative Positioning for Urban Environments based on GNSS and IEEE 802.11p. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Schwarzbach, P.; Tauscher, P.; Michler, A.; Michler, O. V2X based Probabilistic Cooperative Position Estimation Applying GNSS Double Differences. In Proceedings of the 2019 International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zheng, K.; Zheng, Q.; Chatzimisios, P.; Xiang, W.; Zhou, Y. Heterogeneous Vehicular Networking: A Survey on Architecture, Challenges, and Solutions. IEEE Commun. Surv. Tutor. 2015, 17, 2377–2396. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- 3GPP. Technical Specification Group Services and System Aspects; Release 14 Description. Technical Specification (TS) 36.331, 3rd Generation Partnership Project (3GPP); Version 14.2.2; 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- Draft Motion for a Resolution on the Commission Delegated Regulation of 13 March 2019 Supplementing Directive 2010/40/EU of the European Parliament and of the Council with Regard to the Deployment and Operational Use of Cooperative Intelligent Transport Systems; European Parliament: Brussels, Belgium, 2019.
- A European Strategy on Cooperative Intelligent Transport Systems, a Milestone towards Cooperative, Connected and Automated Mobility; European Commission: Brussels, Belgium, 2016.
- Paier, A.; Karedal, J.; Czink, N.; Hofstetter, H.; Dumard, C.; Zemen, T.; Tufvesson, F.; Molisch, A.F.; Mecklenbrauker, C.F. Car-to-car radio channel measurements at 5 GHz: Pathloss, power-delay profile, and delay-Doppler spectrum. In Proceedings of the 2007 4th International Symposium on Wireless Communication Systems, Trondheim, Norway, 17–19 October 2007; pp. 224–228. [Google Scholar] [CrossRef]
- Molisch, A.; Tufvesson, F.; Karedal, J.; Mecklenbrauker, C. A survey on vehicle-to-vehicle propagation channels. IEEE Wirel. Commun. 2009, 16, 12–22. [Google Scholar] [CrossRef]
- Joo, J.; Eyobu, O.S.; Han, D.S.; Jeong, H.J. Measurement based V2V path loss analysis in urban NLOS scenarios. In Proceedings of the 2016 Eighth International Conference on Ubiquitous and Future Networks (ICUFN), Vienna, Austria, 5–8 July 2016; pp. 73–75. [Google Scholar]
- Boban, M.; d’Orey, P.M. Exploring the practical limits of cooperative awareness in vehicular communications. IEEE Trans. Veh. Technol. 2016, 65, 3904–3916. [Google Scholar] [CrossRef]
- Viriyasitavat, W.; Boban, M.; Tsai, H.M.; Vasilakos, A. Vehicular communications: Survey and challenges of channel and propagation models. IEEE Veh. Technol. Mag. 2015, 10, 55–66. [Google Scholar] [CrossRef]
- Saunders, S.R.; Aragón-Zavala, A. Antennas and Propagation for Wireless Communication Systems; Wiley: New York City, NY, USA, 2007. [Google Scholar]
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME-J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Balzer, P.; Trautmann, T.; Michler, O. EPE and speed adaptive Extended Kalman Filter for vehicle position and attitude estimation with low cost GNSS and IMU sensors. In Proceedings of the 2014 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Vienna, Austria, 1–3 September 2014; Volume 1, pp. 649–656. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?—Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Global Positioning System—Standard Positioning Service—Performance Standard; Technical Report; Department of Defense: Arlington, VA, USA, 2008.
- Alam, N.; Dempster, A.G. Cooperative Positioning for Vehicular Networks: Facts and Future. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1708–1717. [Google Scholar] [CrossRef]
- lassoued, K.; Bonnifait, P.; Fantoni, I. Cooperative Localization with Reliable Confidence Domains Between Vehicles Sharing GNSS Pseudoranges Errors with No Base Station. IEEE Intell. Transp. Syst. Mag. 2017, 9, 22–34. [Google Scholar] [CrossRef]
- Xu, G.; Xu, Y. GPS: Theory, Algorithms and Applications, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Liu, K.; Lim, H.B.; Frazzoli, E.; Ji, H.; Lee, V.C. Improving positioning accuracy using GPS pseudorange measurements for cooperative vehicular localization. IEEE Trans. Veh. Technol. 2013, 63, 2544–2556. [Google Scholar] [CrossRef]
- Hsu, L.T. Analysis and modeling GPS NLOS effect in highly urbanized area. GPS Solut. 2018, 22, 7. [Google Scholar] [CrossRef]
- Odijk, D. Positioning Model. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 605–638. [Google Scholar] [CrossRef]
- Gao, X.; Dai, W.; Song, Z.; Cai, C. Reference satellite selection method for GNSS high-precision relative positioning. Geod. Geodyn. 2016, 8. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB Exercises, 4th ed.; John Wiley: New York City, NY, USA, 2012; OCLC: Ocn711044717. [Google Scholar]
- Kelly, A. A 3D State Space Formulation of a Navigation Kalman Filter for Autonomous Vehicles; The Robotics Institute: Pittsburgh, PA, USA, 1994. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Step | Equations | Symbols | Dim. | Description |
|---|---|---|---|---|
| Initialization | State vector | |||
| State covariance matrix | ||||
| Process noise matrix | ||||
| Measurement noise matrix | ||||
| Prediction | State transition function | |||
| State transition Jacobi matrix | ||||
| Correction | Innovation vector Measurement vector | |||
| Measurement function Measurement Jacobi matrix | ||||
| Kalman gain | ||||
| Identity matrix |
| SP | SD | DD | |
|---|---|---|---|
| Differences | None | Receiver | Receiver Satellite |
| Atmospheric errors | existent | reduced | strongly reduced |
| Satellite clock bias | existent | eliminated | eliminated |
| Receiver clock bias | existent | existent | eliminated |
| Stochastic errors | existent | existent | existent |
| Error covariance |
| Const. | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Metric | RMSE | MAE | ||||||||||||||
| Measure | ||||||||||||||||
| 25 | 50 | 75 | 25 | 50 | 75 | |||||||||||
| BASE | 1.7 | 0.8 | 2.0 | 3.3 | 4.4 | 1.1 | 1.6 | 2.2 | 1.5 | 1.5 | 1.9 | 3.9 | 5.5 | 0.6 | 1.2 | 2.1 |
| SP-LSE | 1.8 | 3.1 | 1.8 | 5.3 | 8.8 | 0.8 | 1.3 | 2.1 | 1.4 | 4.5 | 1.3 | 4.9 | 10.9 | 0.4 | 0.8 | 1.6 |
| SP-EKF | 1.8 | 2.4 | 1.9 | 5.0 | 7.6 | 0.8 | 1.4 | 2.2 | 1.4 | 3.3 | 1.4 | 4.9 | 9.6 | 0.4 | 0.9 | 1.7 |
| SD-LSE | 2.2 | 2.6 | 2.4 | 5.1 | 8.1 | 1.1 | 1.8 | 2.8 | 1.8 | 3.8 | 2.0 | 5.2 | 9.6 | 0.6 | 1.4 | 2.4 |
| SD-EKF | 2.2 | 2.2 | 2.5 | 5.0 | 7.5 | 1.1 | 1.8 | 2.9 | 1.8 | 3.2 | 2.1 | 5.3 | 8.9 | 0.7 | 1.4 | 2.4 |
| DD-LSE | 3.3 | 8.3 | 3.6 | 8.3 | 15.0 | 1.6 | 2.6 | 4.1 | 3.1 | 14.3 | 3.3 | 9.4 | 18.8 | 1.0 | 2.1 | 3.9 |
| DD-EKF | 3.0 | 3.6 | 3.5 | 6.5 | 9.2 | 1.6 | 2.6 | 3.9 | 2.6 | 6.1 | 3.0 | 7.4 | 11.7 | 0.9 | 2.0 | 3.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwarzbach, P.; Michler, A.; Tauscher, P.; Michler, O. An Empirical Study on V2X Enhanced Low-Cost GNSS Cooperative Positioning in Urban Environments. Sensors 2019, 19, 5201. https://doi.org/10.3390/s19235201
Schwarzbach P, Michler A, Tauscher P, Michler O. An Empirical Study on V2X Enhanced Low-Cost GNSS Cooperative Positioning in Urban Environments. Sensors. 2019; 19(23):5201. https://doi.org/10.3390/s19235201
Chicago/Turabian StyleSchwarzbach, Paul, Albrecht Michler, Paula Tauscher, and Oliver Michler. 2019. "An Empirical Study on V2X Enhanced Low-Cost GNSS Cooperative Positioning in Urban Environments" Sensors 19, no. 23: 5201. https://doi.org/10.3390/s19235201
APA StyleSchwarzbach, P., Michler, A., Tauscher, P., & Michler, O. (2019). An Empirical Study on V2X Enhanced Low-Cost GNSS Cooperative Positioning in Urban Environments. Sensors, 19(23), 5201. https://doi.org/10.3390/s19235201