Evaluation of Optimal Vibrotactile Feedback for Force-Controlled Upper Limb Myoelectric Prostheses

 ,
,  ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
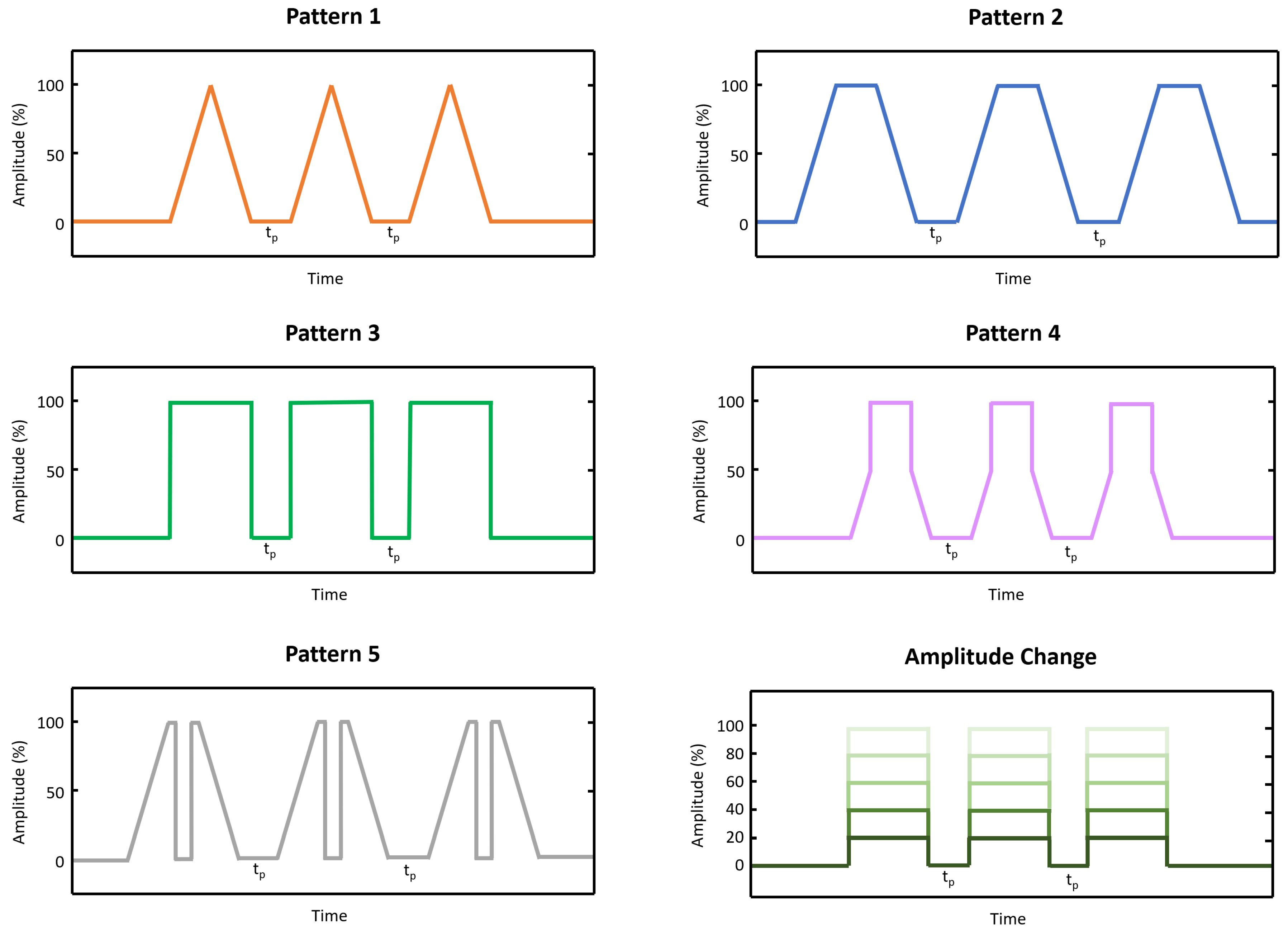
- Pattern shape: For this set, subjects were provided with vibrotactile feedback of different patterns. Feedback levels were simulated by increasing and decreasing the time lag (tp) between three consecutive vibration peaks. The vibrating frequency of the onset segments was fixed by the hardware and was felt by subjects as a continuous stimulus. The time lag was selected in a scale between 0.1 to 1 s in steps of 0.1 s, making a total of 10 different feedback levels. A maximum tp of 1 s was selected to avoid long response times in a future application of these patterns to a real-time prosthetic control. A total of 5 different patterns (see Figure 2) were evaluated. Each feedback level was repeated 5 times and randomly delivered to the subject making a total of 100 trials per pattern.
- Pattern amplitude: For this set, Pattern 3 was selected and amplitude was changed between 20% to 100% in steps of 20% making a total of 5 feedback levels. This pattern was selected as it was the only predefined pattern that could provide different amplitude levels. The number of feedback levels was limited to 5 due to the amplitude resolution provided by the device. Each feedback level was repeated 10 times and randomly delivered to the subject making a total of 50 trials.
3. Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Ribeiro, J.; Mota, F.; Cavalcante, T.; Nogueira, I.; Gondim, V.; Albuquerque, V.; Alexandria, A. Analysis of man-machine interfaces in upper limb prosthesis: A review. Robotics 2019, 8, 16. [Google Scholar] [CrossRef]
- Geethanjali, P. Myoelectric control of prosthetic hands: State-of-the-art review. Med. Devices 2016, 9, 247–255. [Google Scholar] [CrossRef] [PubMed]
- Antfolk, C.; D’Alonzo, M.; Rosén, B.; Lundborg, G.; Sebelius, F.; Cipriani, C. Sensory feedback in upper limb prosthetics. Expert Rev. Med. Devices 2013, 10, 45–54. [Google Scholar] [CrossRef] [PubMed]
- Ciancio, A.L.; Cordella, F.; Barone, R.; Romeo, R.A.; Bellingegni, A.D.; Sacchetti, R.; Davalli, A.; Di Pino, G.; Ranieri, F.; Di Lazzaro, V.; et al. Control of Prosthetic Hands via the Peripheral Nervous System. Front. Neurosci. 2016, 10, 116. [Google Scholar] [CrossRef]
- Trujillo, M.S.; Russell, D.M.; Anderson, D.I.; Mitchell, M. Grip Force Control Using Prosthetic and Anatomical Limbs. J. Prosthetics Orthot. 2014, 30, 132–139. [Google Scholar] [CrossRef]
- Engeberg, D.E.; Meek, M. Enhanced visual feedback for slip prevention with a prosthetic hand. Prosthetics Orthot. Int. 2012, 36, 423–429. [Google Scholar] [CrossRef] [PubMed]
- Clemente, F.; Dosen, S.; Lonini, L.; Markovic, M.; Farina, D.; Cipriani, C. Humans can integrate augmented reality feedback in their sensorimotor control of a robotic hand. IEEE Trans. Human-Mach. Syst. 2017, 47, 583–589. [Google Scholar] [CrossRef]
- Giggins, O.M.; McCarthy, U.; Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 2013, 10, 60. [Google Scholar] [CrossRef]
- Došen, S.; Markovic, M.; Somer, K.; Graimann, B.; Farina, D. EMG Biofeedback for online predictive control of grasping force in a myoelectric prosthesis. J. Neuroeng. Rehabil. 2015, 12, 55. [Google Scholar] [CrossRef]
- Shehata, A.W.; Scheme, E.J.; Sensinger, J.W. Audible Feedback Improves Internal Model Strength and Performance of Myoelectric Prosthesis Control. Nat. Sci. Rep. 2018, 8, 8541. [Google Scholar] [CrossRef]
- Markovic, M.; Schweisfurth, M.A.; Engels, L.; Bentz, T.; Wüstefeld, D.; Farina, D.; Dosen, S. The clinical relevance of advanced artificial feedback in the control of a multi-functional myoelectric prosthesis. J. Neuroeng. Rehabil. 2018, 15, 28. [Google Scholar] [CrossRef] [PubMed]
- Pena, A.E.; Rincon-Gonzalez, L.; Abbas, J.J.; Jung, R. Effects of vibrotactile feedback and grasp interface compliance on perception and control of a sensorized myoelectric hand. PLoS ONE 2019, 14, e0210956. [Google Scholar] [CrossRef] [PubMed]
- Raveh, E.; Friedman, J.; Portnoy, S. Evaluation of the effects of adding vibrotactile feedback to myoelectric prosthesis users on performance and visual attention in a dual-task paradigm. Clin. Rehabil. 2018, 32, 1308–1316. [Google Scholar] [CrossRef] [PubMed]
- Witteveen, H.J.; Rietman, H.S.; Veltink, P.H. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthetics Orthot. Int. 2015, 39, 204–212. [Google Scholar] [CrossRef]
- Held, J.P.; Klaassen, B.; van Beijnum, B.-J.F.; Luft, A.R.; Veltink, P.H. Usability evaluation of a vibrotactile feedback system in stroke subjects. Front. Bioeng. Biotechnol. 2017, 4, 98. [Google Scholar] [CrossRef]
- Li, Y.; Jeon, W.R.; Nam, C.S. Navigation by vibration: Effects of vibrotactile feedback on a navigation task. Int. J. Ind. Ergon. 2015, 46, 76–84. [Google Scholar] [CrossRef]
- Guemann, M.; Bouvier, S.; Halgand, C.; Borrini, L.; Paclet, F.; Lapeyre, E.; Ricard, D.; Cattaert, D.; de Rugy, A. Sensory and motor parameter estimation for elbow myoelectric control with vibrotactile feedback. Ann. Phys. Rehabil. Med. 2018, 61, e467. [Google Scholar] [CrossRef]
- Thomas, N.; Ung, G.; McGarvey, C.; Brown, J.D. Comparison of vibrotactile and joint-torque feedback in a myoelectric upper limb prosthesis. J. Neuroeng. Rehabil. 2019, 16, 70. [Google Scholar] [CrossRef]
- Antfolk, C.; D’Alonzo, M.; Controzzi, M.; Lundborg, G.; Rosén, B.; Sebelius, F.; Cipriani, C. Artificial redirection of sensation from prosthetic fingers to the phantom hand map on transradial amputees: Vibrotactile versus mechanotactile sensory feedback. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 112–120. [Google Scholar] [CrossRef]
- Isaković, M.; Belić, M.; Štrbac, M.; Popović, D.; Došen, S.; Farina, D.; Keller, T. Electrotactile feedback improves performance and facilitates learning in the routine grasping task. Eur. J. Transl. Myol. 2016, 26, 6069. [Google Scholar] [CrossRef]
- Schweisfurth, M.; Markovic, M.; Dosen, S.; Teich, F.; Graimann, B.; Farina, D. Electrotactile EMG feedback improves the control of prosthesis grasping force. J. Neural Eng. 2016, 13, 056010. [Google Scholar] [CrossRef] [PubMed]
- Schiefer, M.; Tan, D.; Sidek, S.M.; Tyler, D.J. Sensory feedback by peripheral nerve stimulation improves task performance in individuals with upper limb loss using a myoelectric prosthesis. J. Neural Eng. 2016, 13, 016001. [Google Scholar] [CrossRef] [PubMed]
- Engels, L.F.; Shehata, A.W.; Scheme, E.J.; Sensinger, J.W.; Cipriani, C. When less is more—Discrete tactile feedback dominates continuous audio biofeedback in the integrated percept while controlling a myoelectric prosthetic hand. Front. Neurosci. 2019, 13, 578. [Google Scholar] [CrossRef] [PubMed]
- Rognini, G.; Petrini, F.M.; Raspopovic, S.; Valle, G.; Granata, G.; Strauss, I.; Solcà, M.; Bello-Ruiz, J.; Herbelin, B.; Mange, R.; et al. Multisensory bionic limb to achieve prosthesis embodiment and reduce distorted phantom limb perceptions. J. Neurol. Neurosurg. Psychiatry 2018, 90, 833–836. [Google Scholar] [CrossRef]
- Sharma, A.; Torres-Moreno, R.; Zabjek, K.; Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 2014, 51, 907–918. [Google Scholar] [CrossRef]
- Wentink, E.C.; Mulder, A.; Rietman, J.S.; Veltink, P.H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. In Proceedings of the 33rd Annual International Conference of the IEEE EMBS, Boston, MA, USA, 30 August–3 September 2011; pp. 1668–1671. [Google Scholar]
- Stephens-Fripp, B.; Alici, G.; Mutlu, R. A Review of Non-Invasive Sensory Feedback Methods for Transradial Prosthetic Hands. IEEE Access 2018, 6, 6878–6899. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez-Rodriguez, A.; Ramon, J.L.; Morell, V.; Garcia, G.J.; Pomares, J.; Jara, C.A.; Ubeda, A. Evaluation of Optimal Vibrotactile Feedback for Force-Controlled Upper Limb Myoelectric Prostheses. Sensors 2019, 19, 5209. https://doi.org/10.3390/s19235209
Gonzalez-Rodriguez A, Ramon JL, Morell V, Garcia GJ, Pomares J, Jara CA, Ubeda A. Evaluation of Optimal Vibrotactile Feedback for Force-Controlled Upper Limb Myoelectric Prostheses. Sensors. 2019; 19(23):5209. https://doi.org/10.3390/s19235209
Chicago/Turabian StyleGonzalez-Rodriguez, Andrea, Jose L. Ramon, Vicente Morell, Gabriel J. Garcia, Jorge Pomares, Carlos A. Jara, and Andres Ubeda. 2019. "Evaluation of Optimal Vibrotactile Feedback for Force-Controlled Upper Limb Myoelectric Prostheses" Sensors 19, no. 23: 5209. https://doi.org/10.3390/s19235209
APA StyleGonzalez-Rodriguez, A., Ramon, J. L., Morell, V., Garcia, G. J., Pomares, J., Jara, C. A., & Ubeda, A. (2019). Evaluation of Optimal Vibrotactile Feedback for Force-Controlled Upper Limb Myoelectric Prostheses. Sensors, 19(23), 5209. https://doi.org/10.3390/s19235209