A Determination Method for Gait Event Based on Acceleration Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Acquisition and Processing of Acceleration Signal Data
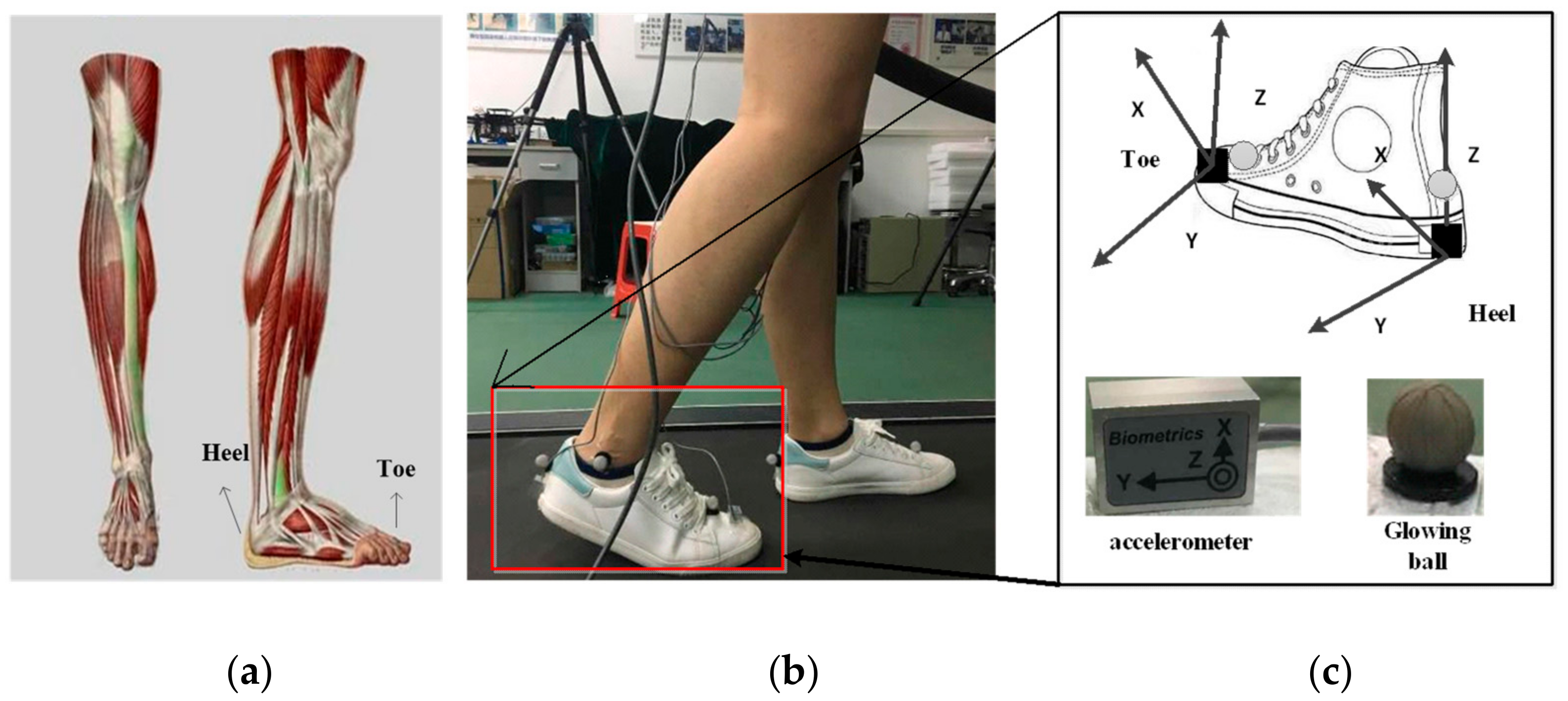
2.1. Data Acquisition
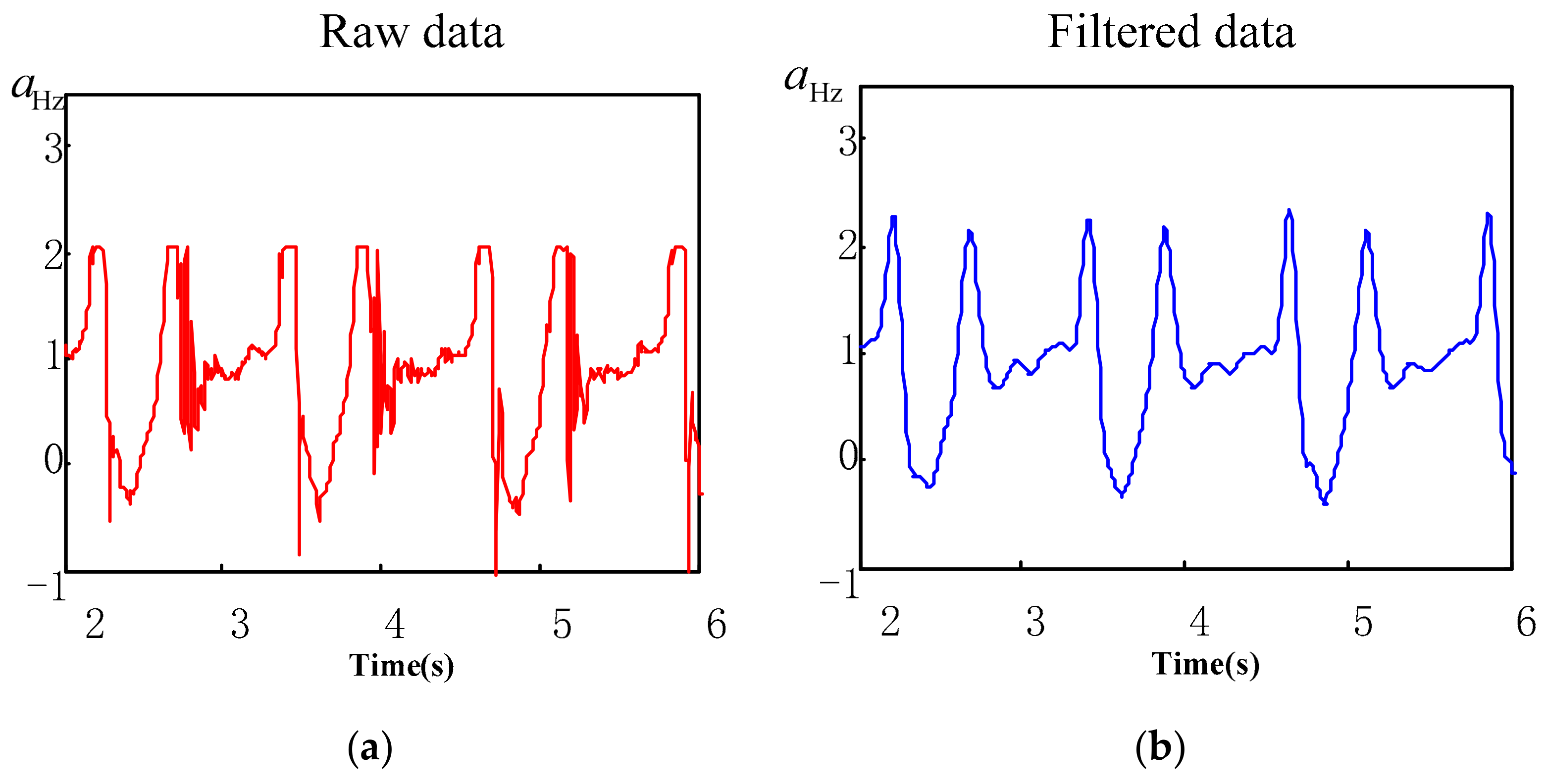
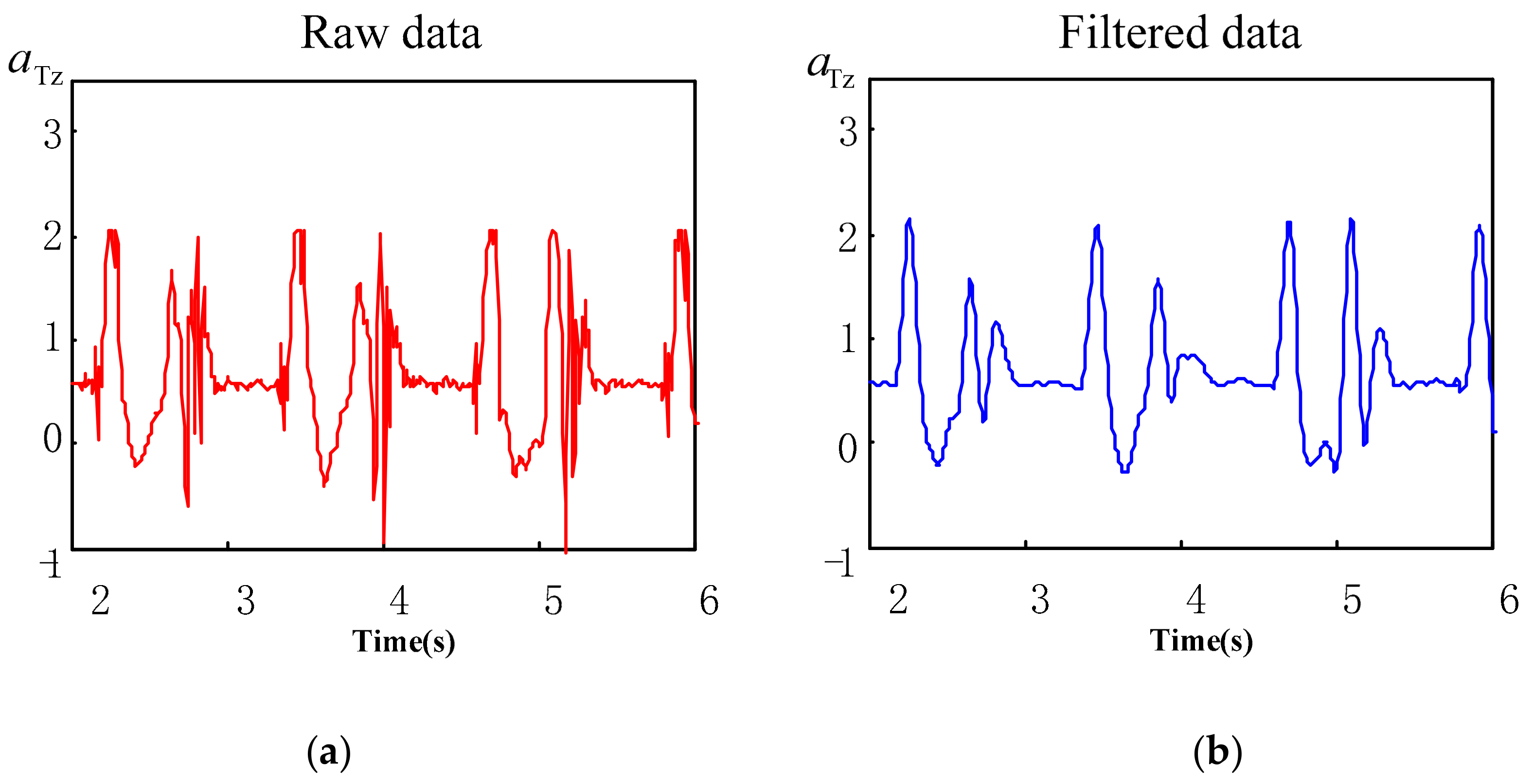
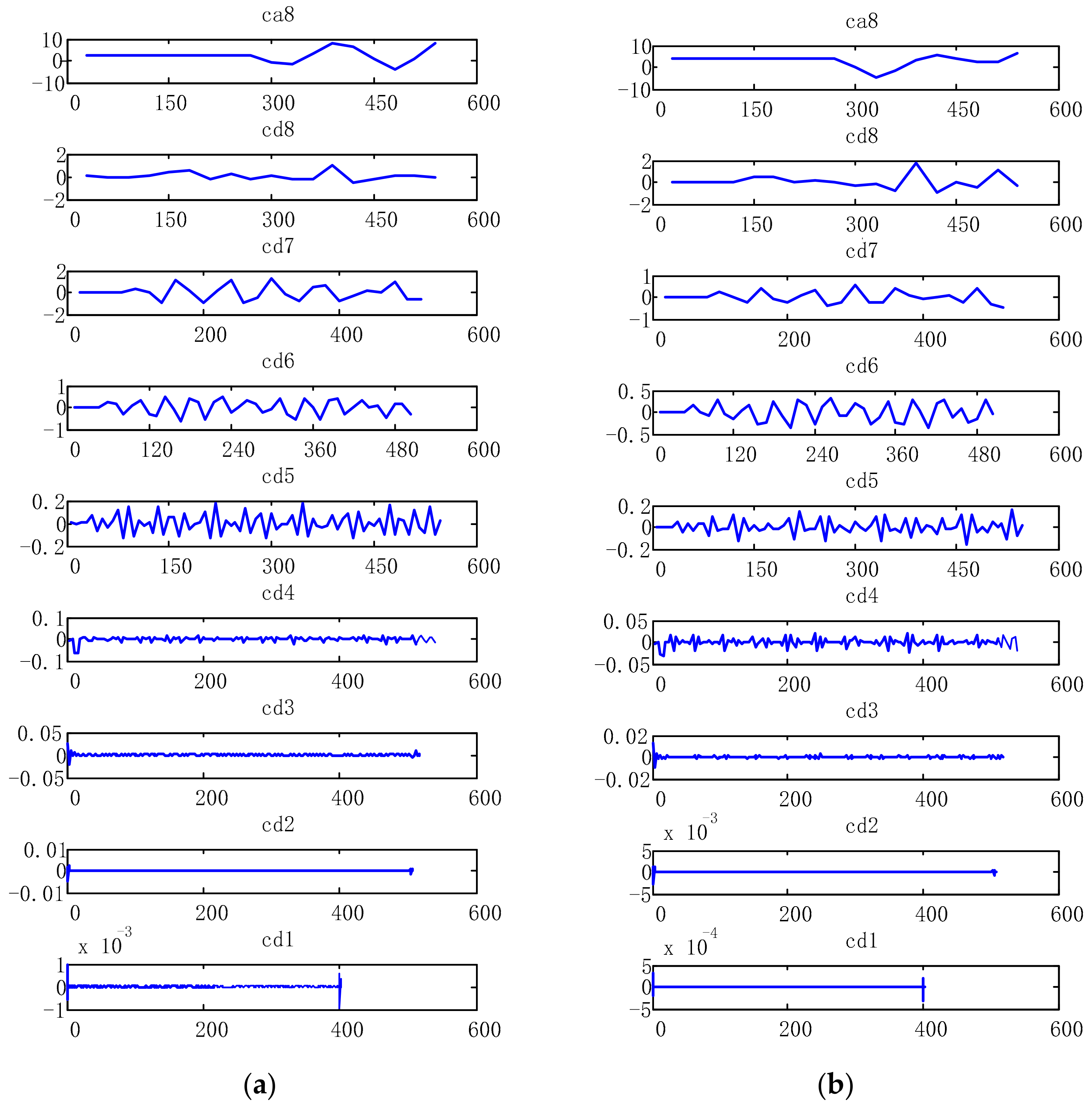
2.2. Data Processing
3. Methods of Gait Event Analysis
3.1. Gait Event
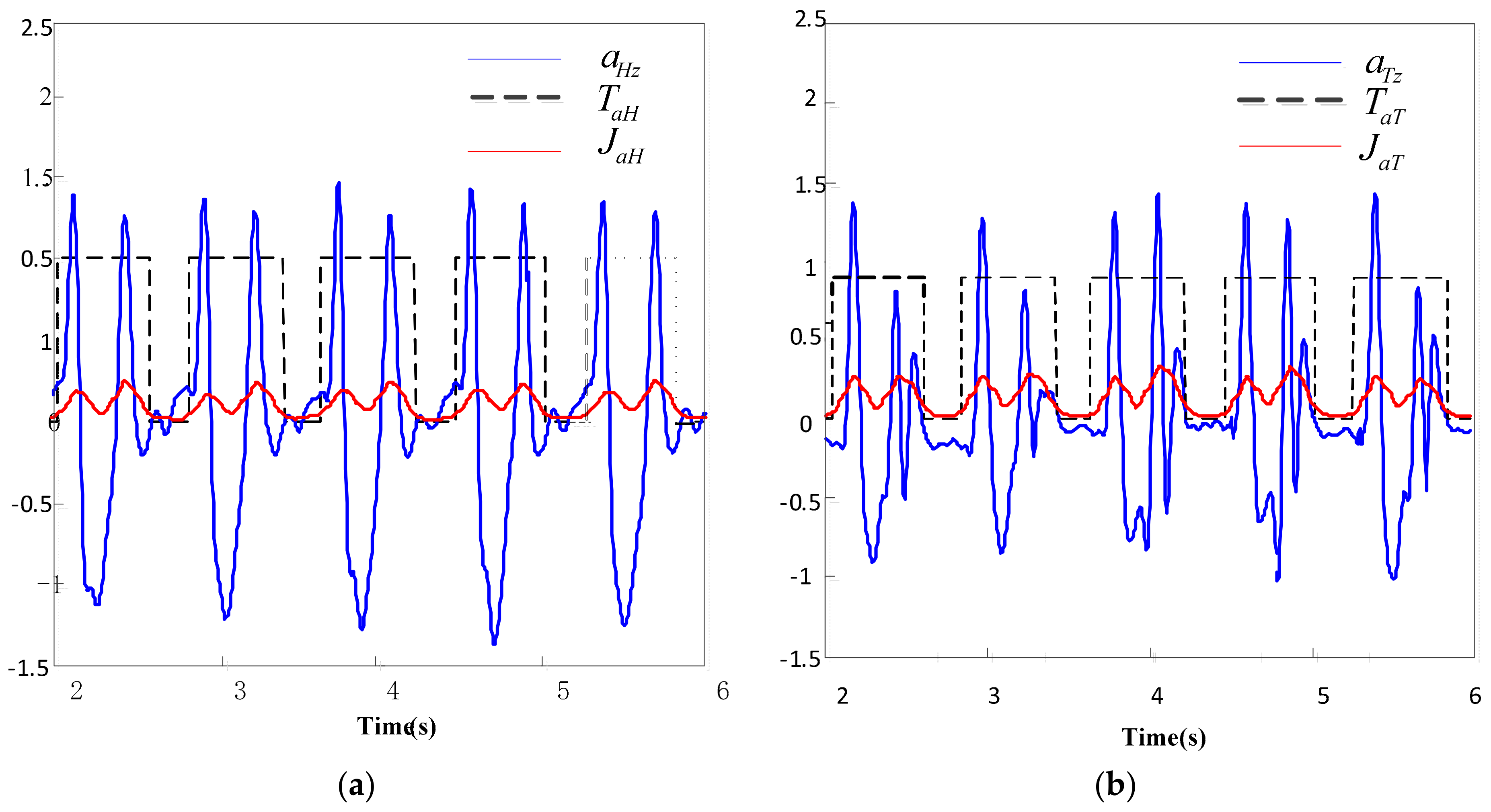
3.2. Preliminary Segmentation
3.3. Gait Event Determination
3.3.1. Determination of Time of Heel Strike (HS) Event
3.3.2. Determination of Time of Toe Strike (TS) Event
3.3.3. Determination of Time of Heel Off (HO) Event
3.3.4. Determination of Time of Toe Off (TO) Event
4. Results and Discussion
4.1. Analysis of Preliminary Segmentation
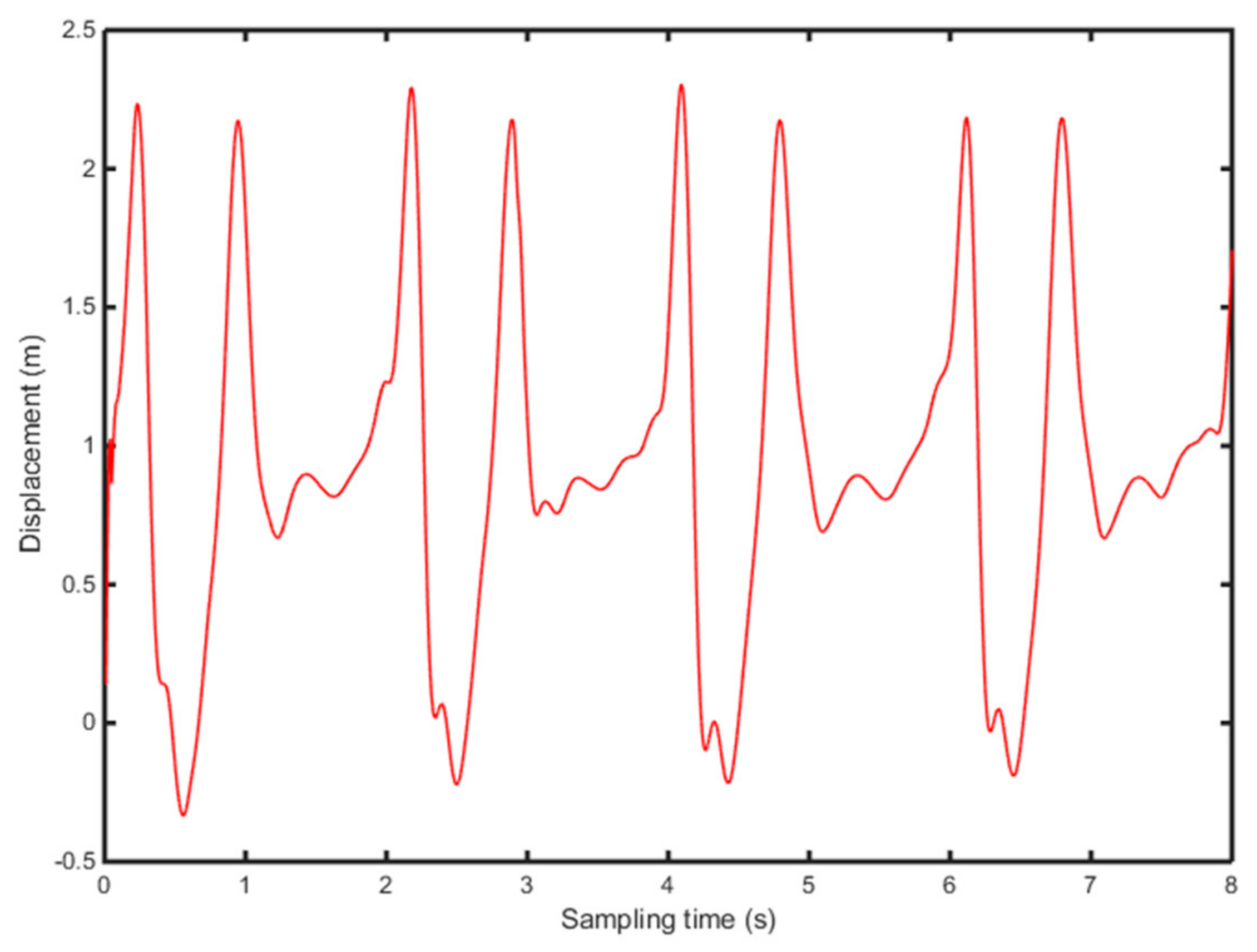
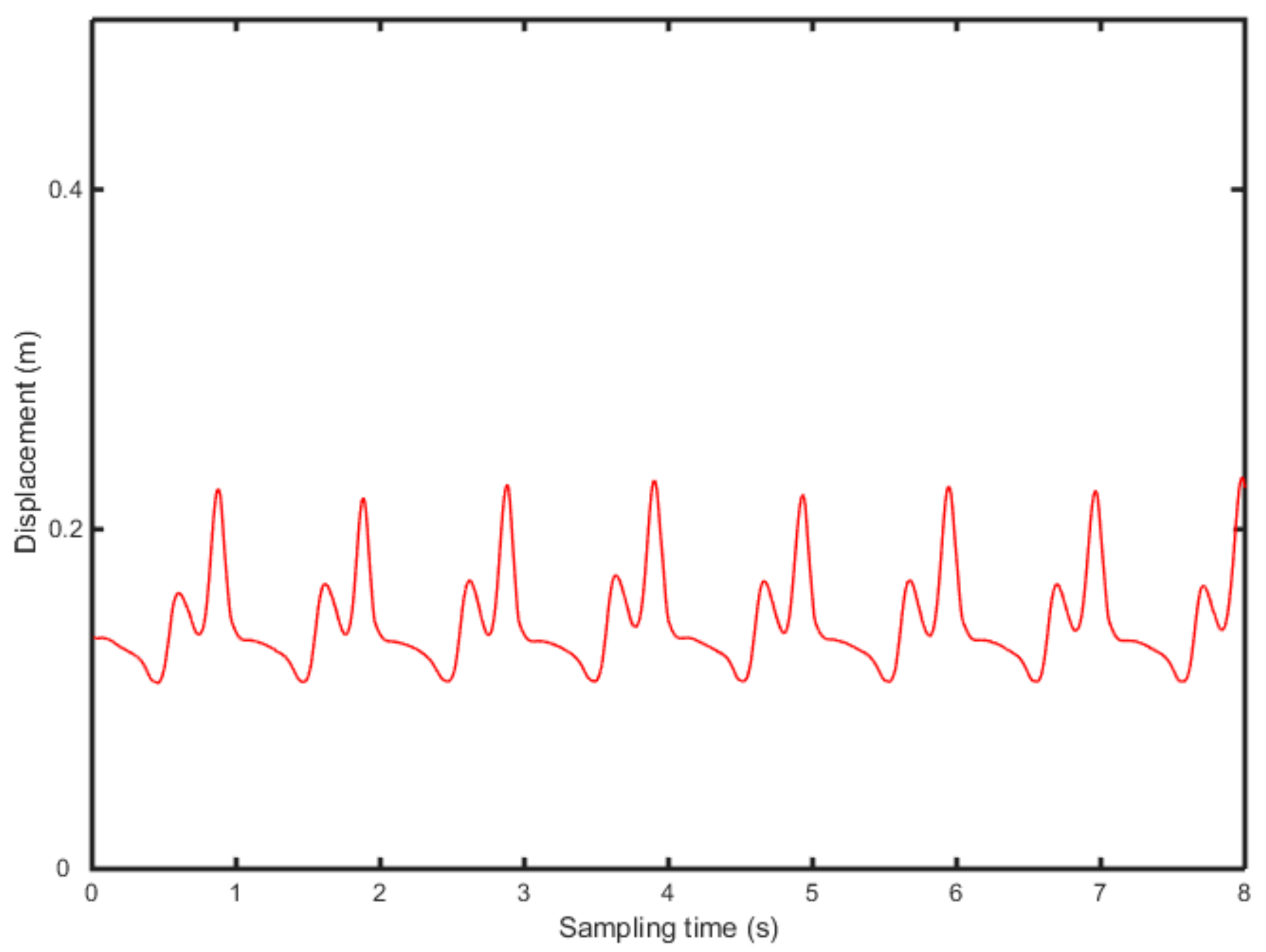
4.2. Analysis of Heel and Toe Displacement
4.3. Analysis of Gait Event Determination
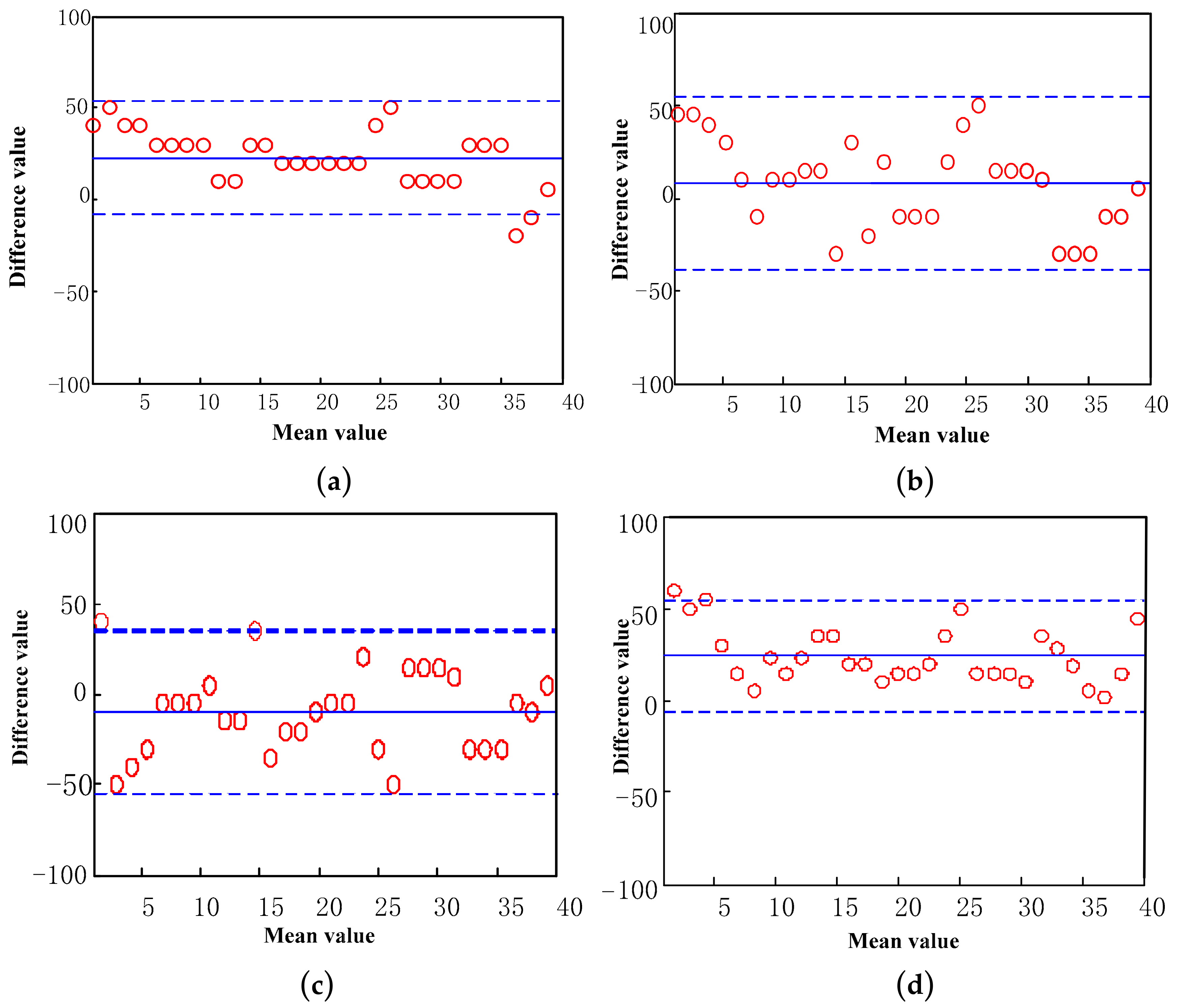
4.4. Error Analysis and Consistency Test
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Loske, S.; Nüesch, C.; Byrnes, K.S.; Fiebig, O.; Schären, S.; Mündermann, A.; Netzer, C. Decompression surgery improves gait quality in patients with symptomatic lumbar spinal stenosis. Spine J. 2018, 18, 2195–2204. [Google Scholar] [CrossRef] [PubMed]
- Zomar, B.; Bryant, D.; Hunter, S.; Howard, J.; Vasarhelyi, E.; Lanting, B. A randomised trial comparing spatio-temporal gait parameters after total hip arthroplasty between the direct anterior and direct lateral surgical approaches. HIP Int. 2018, 28, 478–484. [Google Scholar] [CrossRef] [PubMed]
- Damasevicius, R.; Vasiljevas, M.; Salkevicius, J.; Woźniak, M. Human activity recognition in aal environments using random projections. Comput. Math. Methods Med. 2016, 213, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Mannini, A.; Sabatini, A. Machine learning methods for classifying human physical activity from on-body accelerometers. Sensors 2010, 10, 1154–1175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, C.; Bian, G.; Hou, Z.; Zhao, J.; Su, G.; Zhou, H.; Peng, L.; Wang, W. Simultaneous recognition and assessment of post-stroke hemiparetic gait by fusing kinematic, kinetic, and electrophysiological data. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 856–864. [Google Scholar] [CrossRef] [PubMed]
- Lopez-Meyer, P.; Fulk, G.D.; Sazonov, E.S. Automatic detection of temporal gait parameters in poststroke individuals. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Baniasad, M.; Farahmand, F.; Arazpour, M.; Zohoor, H. Coordinated activities of trunk and upper extremity muscles during walker-assisted paraplegic gait: A synergy study. Hum. Mov. Sci. 2018, 62, 184–193. [Google Scholar] [CrossRef]
- Wang, M.; Wang, X.A.; Peng, C.; Zhang, S.X.; Fan, Z.C.; Liu, Z. Research on EMG segmentation algorithm and walking analysis based on signal envelope and integral electrical signal. Photonic Netw. Commun. 2019, 37, 195–203. [Google Scholar] [CrossRef]
- Sun, C.; Wang, C.; Lai, W.K. Gait analysis and recognition prediction of the human skeleton based on migration learning. Phys. A 2019, 10, 532–546. [Google Scholar] [CrossRef]
- Sokolova, A.; Konushin, A. Methods of gait recognition in video. Program. Comput. Softw. 2019, 45, 213–220. [Google Scholar] [CrossRef]
- Zhang, X.F.; Sun, S.Q.; Li, C.; Tang, Z.C. Impact of load variation on the accuracy of gait recognition from surface EMG signals. Appl. Sci. Basel 2018, 8, 1462. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.R.; Wang, J.J.; Xi, X.G.; She, Q.S.; Luo, Z.Z. Gait recogIlition for lower extremity electromyographic signals based on PSO-SVM method. J. Electron. Inf. Technol. 2015, 37, 1154–1159. [Google Scholar]
- Li, Y.; Gao, F.R.; Chen, H.H.; Xu, M.H. Gait recognition based on EMG with different individuals and sample sizes. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 4068–4072. [Google Scholar]
- Soubra, R.; Chkeir, A.; Mourad-Chehade, F.; Alshamaa, D.; Dauriac, B.; Duchene, J. Doppler radar system for an automatic transfer phase detection using wavelet transform analysis. In Proceedings of the 3rd International Conference on Bio-Engineering for Smart Technologies, Paris, France, 24–26 April 2019; NaitAli, A., Ed.; IEEE: New York, NY, USA, 2019; pp. 34–39. [Google Scholar]
- Lefeber, N.; Degelaen, M.; Truyers, C.; Safin, I.; Beckwee, D. Validity and reproducibility of inertial physilog sensors for spatiotemporal gait analysis in patients with stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1865–1874. [Google Scholar] [CrossRef] [PubMed]
- Rueterbories, J.; Spaich, E.G.; Larsen, B.; Andersen, O.K. Methods for gait event detection and analysis in ambulatory systems. Med. Eng. Phys. 2010, 32, 545–552. [Google Scholar] [CrossRef] [PubMed]
- Taborri, J.; Palermo, E.; Rossi, S.; Cappa, P. Gait partitioning methods: A systematic review. Sensors 2016, 16, 66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Healy, A.; Linyard-Tough, K.; Chockalingam, N. Agreement between the spatiotemporal gait parameters of healthy adults from the optogait system and a traditional three-dimensional motion capture system. J. Biomech. Eng.Trans. ASME 2019, 141, 4–20. [Google Scholar] [CrossRef]
- O’Connor, C.M.; Thorpe, S.K.; O’Malley, M.J.; Vaughan, C.L. Automatic detection of gait events using kinematic data. Gait Posture 2007, 25, 469–474. [Google Scholar] [CrossRef]
- Skelly, M.M.; Chizeck, H.J. Real-time gait event detection for paraplegic FES walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 59–68. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, X.; Yin, G. Human gait events fast recognition method via surface electromyography. China Mech. Eng. 2016, 27, 911–916. [Google Scholar]
- Joshi, D.; Nakamura, B.H.; Hahn, M.E. A novel approach for toe off estimation during locomotion and transitions on ramps and level ground. IEEE J. Biomed. Health Inform. 2016, 20, 153–157. [Google Scholar] [CrossRef]
- Ulrich, B.; Santos, A.N.; Jolles, B.M.; Benninger, D.H.; Favre, J. Gait events during turning can be detected using kinematic features originally proposed for the analysis of straight-line walking. J. Biomech. 2019, 91, 69–78. [Google Scholar] [CrossRef] [PubMed]
- Rueterbories, J.; Spaich, E.G.; Andersen, O.K. Gait event detection for use in FES rehabilitation by radial and tangential foot accelerations. Med. Eng. Phys. 2014, 36, 502–508. [Google Scholar] [CrossRef] [PubMed]
- Tirosh, O.; Sparrow, W.A. Identifying heel contact and toe-off using forceplate thresholds with a range of digital-filter cutoff frequencies. J. Appl. Biomech. 2003, 19, 178–184. [Google Scholar] [CrossRef]
- Teufl, W.; Lorenz, M.; Miezal, M.; Taetz, B.; Fröhlich, M.; Bleser, G. Towards inertial sensor based mobile gait analysis: Event-detection and spatio-temporal parameters. Sensors 2018, 19, 38. [Google Scholar] [CrossRef] [Green Version]
- Selles, R.W.; Formanoy, M.A.G.; Bussmann, J.B.J.; Janssens, P.J.; Stam, H.J. Automated estimation of initial and terminal contact timing using accelerometers; development and validation in transtibial amputees and controls. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 81–88. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Li, Q. Inertial sensor-based methods in walking speed estimation: A systematic review. Sensors 2012, 12, 6102–6116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yamada, M.; Aoyama, T.; Mori, S.; Nishiguchi, S.; Okamoto, K.; Ito, T.; Muto, S.-Y.; Ishihara, T.; Yoshitomi, H.; Ito, H. Objective assessment of abnormal gait in patients with rheumatoid arthritis using a smartphone. Rheumatol. Int. 2011, 32, 3869–3874. [Google Scholar] [CrossRef]
- Sposaro, F.; Tyson, G. iFall: An android application for fall monitoring and response. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 6119–6122. [Google Scholar]
- Galna, B.; Barry, G.; Jackson, D.; Mhiripiri, D.; Olivier, P.; Rochester, L. Accuracy of the Microsoft Kinect sensor for measuring movement in people with Parkinson’s disease. Gait Posture 2014, 39, 1062–1068. [Google Scholar] [CrossRef] [Green Version]
- Leightley, D.; McPhee, J.S.; Yap, M.H. Automated analysis and quantification of human mobility using a depth sensor. IEEE J. Biomed. Health Inform. 2017, 21, 939–948. [Google Scholar] [CrossRef] [Green Version]
- Darby, J.; Li, B.; Costen, N. Tracking a walking person using activity-guided annealed particle filtering. In Proceedings of the 8th IEEE International Conference on Automatic Face & Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–6. [Google Scholar]
- Imtiaz, M.H.; Ramos-Garcia, R.I.; Wattal, S.; Tiffany, S.; Sazonov, E. Wearable sensors for monitoring of cigarette smoking in free-living: A systematic review. Sensors 2019, 19, 4678. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Xu, Y. Human gait acceleration signal classification based on improved multiple multiscale entropy. Chin. J. Sens. Actuators 2015, 28, 1805–1811. [Google Scholar]
- Ji, N.; Zhou, H.; Guo, K.F.; Samuel, O.W.; Huang, Z.; Xu, L.S.; Li, G.L. Appropriate mother wavelets for continuous gait event detection based on time-frequency analysis for hemiplegic and healthy individuals. Sensors 2019, 19, 3462. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, H.; Ji, N.; Samuel, O.W.; Cao, Y.F.; Zhao, Z.Y.; Chen, S.X.; Li, G.L. Towards real-time detection of gait events on different terrains using time-frequency analysis and peak heuristics algorithm. Sensors 2016, 16, 1634. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hreljac, A.; Marshall, R.N. Algorithms to determine event timing during normal walking using kinematic data. J. Biomech. 2000, 33, 783–786. [Google Scholar] [CrossRef]
- González, I.; Fontecha, J.; Hervás, R.; Bravo, J. Estimation of temporal gait events from a single accelerometer through the scale-space filtering idea. J. Med. Syst. 2016, 40, 251–260. [Google Scholar] [CrossRef] [PubMed]
- González, I.; Fontecha, J.; Hervás, R.; Bravo, J. An ambulatory system for gait monitoring based on wireless sensorized insoles. Sensors 2015, 15, 16589–16613. [Google Scholar] [CrossRef] [Green Version]
- Morbidoni, C.; Cucchiarelli, A.; Fioretti, S.; Di Nardo, F. A deep learning approach to EMG-based classification of gait phases during level ground walking. Electronics 2019, 8, 894. [Google Scholar] [CrossRef] [Green Version]
- Sánchez Manchola, M.D.; Bernal, M.J.P.; Munera, M.; Cifuentes, C.A. Gait phase detection for lower-limb exoskeletons using foot motion data from a single inertial measurement unit in hemiparetic individuals. Sensors 2019, 19, 2988. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Zheng, J.; Wang, Y.; Yu, L.; Zhan, E.; Song, Q. Self-tuning threshold method for real-time gait phase detection based on ground contact forces using FSRS. Sensors 2018, 18, 481. [Google Scholar] [CrossRef] [Green Version]
- Boutaayamou, M.; Schwartz, C.; Stamatakis, J.; Denoël, V.; Maquet, D.; Forthomme, B.; Croisier, J.-L.; Macq, B.; Verly, J.G.; Garraux, G.; et al. Development and validation of an accelerometer-based method for quantifying gait events. Med. Eng. Phys. 2015, 37, 226–232. [Google Scholar] [CrossRef] [Green Version]
- Luo, Z.Z.; Shen, H.X. Hermite interpolation-based wavelet transform modulus maxima reconstruction algorithm’s application to EMG de-noising. J. Electron. Inf. Technol. 2009, 31, 857–860. [Google Scholar]
- Mickelborough, J.; van der Linden, M.L.; Richards, J.; Ennos, A.R. Validity and reliability of a kinematic protocol for determining foot contact events. Gait Posture 2000, 11, 32–37. [Google Scholar] [CrossRef]
- Asghari Oskoei, M.; Hu, H. Myoelectric control systems—A survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Ding, J.W.; Ma, J.D.; Qin, Y.L.; Fan, J.; Fang, B.; Hu, J.C. Accurate Measurement of Displacement Using Acceleration Signal. In Tenth International Symposium on Precision Engineering Measurements and Instrumentation; Tan, J., Lin, J., Eds.; Spie-Int Soc Optical Engineering: Bellingham, WA, USA, 2019; Volume 11053, pp. 321–327. [Google Scholar]
- Jeon, H.; Lee, W.; Park, H.; Lee, H.J.; Kim, S.K.; Kim, H.B.; Jeon, B.; Park, K.S. High-accuracy automatic classification of Parkinsonian tremor severity using machine learning method. Physiol. Meas. 2017, 38, 1980–1999. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, C.; Gao, F.; Li, Y. A Determination Method for Gait Event Based on Acceleration Sensors. Sensors 2019, 19, 5499. https://doi.org/10.3390/s19245499
Mei C, Gao F, Li Y. A Determination Method for Gait Event Based on Acceleration Sensors. Sensors. 2019; 19(24):5499. https://doi.org/10.3390/s19245499
Chicago/Turabian StyleMei, Chang, Farong Gao, and Ying Li. 2019. "A Determination Method for Gait Event Based on Acceleration Sensors" Sensors 19, no. 24: 5499. https://doi.org/10.3390/s19245499