1. Introduction
The field of localization systems in wireless communications is growing since it enables a wireless mobile node to have both data communication and positioning capabilities. The localization process is typically categorized into two phases: (i) ranging (measurement) phase, during which the distance between the transceivers is measured, and (ii) positioning (location-update) phase, during which the current position of the wireless node is determined using the knowledge from the ranging phase and positioning algorithms [
1]. Regarding positioning, besides wireless-only positioning systems, multiple sensor approaches, like diversity navigation, have been proposed as well [
1]. In those systems, ranging is supported by using additional information, e.g., from an Inertial Measurement Unit (IMU). In this paper, we focus on the accuracy of wireless ranging based on Ultrawide Bandwidth (UWB), and specifically study different Two-Way Ranging (TWR) methods available in the literature.
TWR plays an important role in measuring the distance between two wireless transceiver devices when clock synchronization is not available or absent in a time-based localization system. By knowing the Time of Flight (TOF) between the two transceivers, i.e., a signal’s traveling time in free space, the distance between them can easily be measured using the speed of light. However, it is necessary that the two transceivers have a synchronized clock (same clock domain) in such one-way ranging systems.
In the TWR approach, a set of time periods (e.g.,
and
) is used to calculate the distance between two transceivers (
Section 2) instead of using direct timestamps. This is because the period of a certain time is the same for every device regardless of their own clock references. However, because of the imperfections of clock oscillators in the real physical world, a clock drifts away even if it is perfectly tuned in the initial state [
2]. These clock drifts cause inaccuracy in measuring the mentioned time periods, especially when the application requires centimeter-level accuracy. This is because 1
of TOF error can lead to an approximate error of 30 cm in distance estimation [
3]. For this reason, there are several TWR methods available in the literature to minimize this inaccuracy in ranging due to clock drifts (
Section 2).
As a consequence, the existing TOF error-estimation model for TWR, described in the IEEE 802.15.4-2011 standard, tackles clock drifts as the only dominant errors [
3] (pp. 258–275). However, this model is inadequate for analysis of system performance between different TWR methods, especially when it is important to identify a better method for a certain application. For instance, the performance difference between two closely related TWRs, such as a symmetric double-sided TWR (SDS-TWR) and alternative double-sided TWR (AltDS-TWR), cannot be definitely clarified using the existing model [
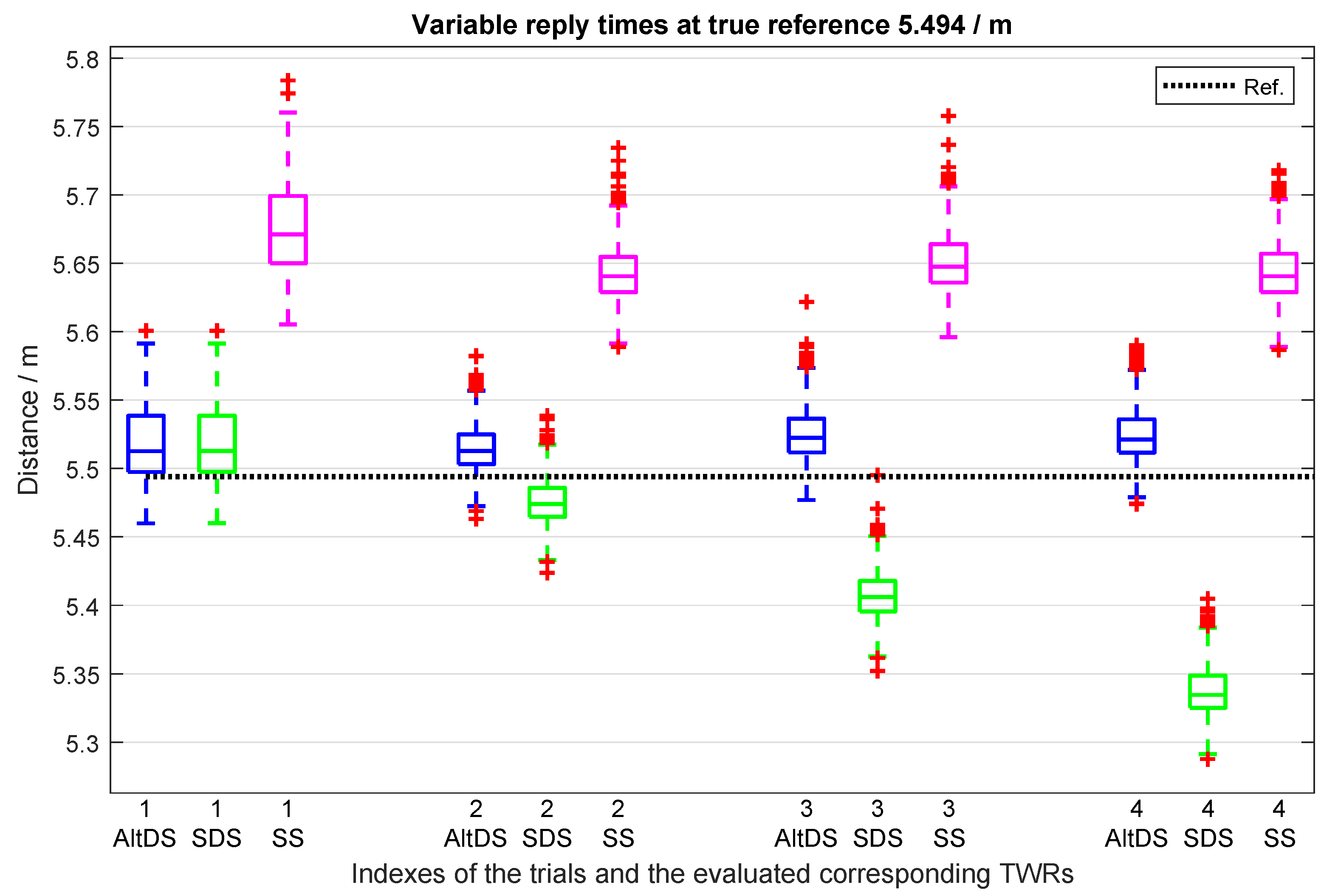
4]. Moreover, AltDS-TWR is robust against the variation of reply time, as we discuss in
Section 7.3.1, which cannot be explained with a conventional clock-drift model, as above.
In this paper, we propose a novel Time-of-Flight Error Estimation Model (TEEM) for TWR methods, which is an extended version of the IEEE 802.15.4-2011 standard [
3] (pp. 258–275). Regarding this, a delay in message delivery (
Section 3.1) is accounted as a feature in the proposed model. In fact, this delay is crucial and fundamental, because TOF error is affected not only by clock drift in the oscillator but also by other error sources, such as propagation time delay [
5], transmission time delay, and receiving time delay [
2]. That includes the delay introduced by the antenna, PCB, and other external and internal electronic components.
In addition, we demonstrate the pitfalls of the most highlighted TWR techniques in the literature, namely, SDS-TWR. Conventionally, SDS-TWR is commonly used to illustrate the reduction of TOF error due to clock drifts in wireless ranging systems [
3]. Concerning this, we argue that AltDS-TWR is more robust than SDS-TWR in all aspects.
This article is the extended version of our previous conference paper, presented in IPIN 2018 [
6]. Three significant changes were made. Firstly, experiment results for different TWR methods are given to validate the simulation results presented in the conference paper (
Section 7). Secondly, we provide the generic delay model for TWR methods (
Section 3.1 and
Section 3.2), which was regarded as a propagation time-delay error in our previous work [
6]. Thirdly, we verify our argument, which is that AltDS-TWR method outperforms SDS-TWR, with both numerical simulation (
Section 6) and experimental evaluation (
Section 7) results.
This paper is organized as follows: In
Section 2, the overview of TWR methods, the existing standard TOF error-estimation approach, and related work are addressed. Then, the foundation of the proposed TOF error-estimation model is established in
Section 3, followed by analytical comparison between the proposed and conventional TOF error estimation in
Section 4. A comparative study between four TWR methods using the proposed model is provided in
Section 5, and the numerical simulation results are presented in
Section 6. Then, the experimental evaluation results are given in
Section 7, and a summarized discussion in
Section 8. Final conclusions are drawn in
Section 9.
2. State of the Art for TWR Methods and Related Work
In this section, we address four commonly used TWR methods in time-based wireless localization systems and the existing TOF error-estimation model, given in the IEEE 802.15.4-2011 standard. IEEE 802.15.4 uses clock drifts as the only dominant error to compare TOF errors among different TWR methods [
3].
Brief introductions for each of the evaluated TWR methods, which are the single-sided TWR (SS-TWR), (symmetric) DS-TWR, AltDS-TWR, and asymmetric double-sided TWR (ADS-TWR), are presented in this section. These methods were carefully chosen to reflect the general overview of the available TWR methods in the literature. The remaining TWR methods, derived mainly from the presented techniques, are: SDS-TWR with multiple acknowledgments [
7], asynchronous double TWR (D-TWR) [
8], burst-mode SDS-TWR [
9], SDS-TWR with unequal reply-time method [
10], TWR using estimated frequency offsets [
11], parallel DS-TWR [
12], and passive extended DS-TWR [
13].
Apart from measuring distances between transceivers in wireless communications, TWR has also been widely applied in networkwide clock-synchronization algorithms for wireless sensor networks (WSN) [
14,
15,
16,
17].
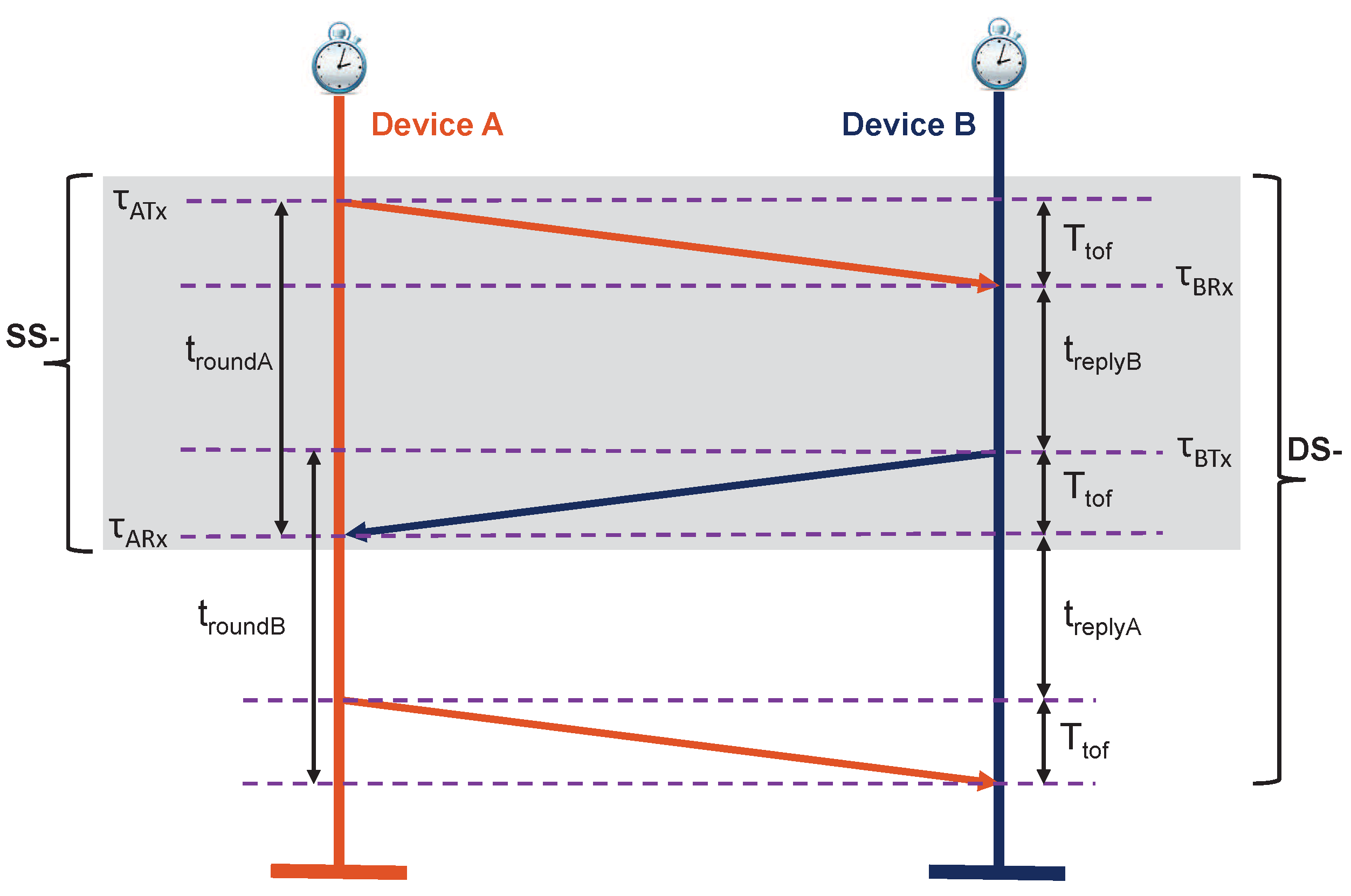
2.1. (Simple) SS-TWR
For SS-TWR [
3,
18] (the shaded area in
Figure 1), the round-trip time of the signal can be formulated as:
where
is the true round-trip time of a signal measured at Device A and
is the true reply time of a signal measured at Device B (
Figure 1).
and
are the transmitted and received timestamps measured at Device A, and
and
are the transmitted and received timestamps measured at Device B, respectively.
In particular, the round-trip time of a signal (
) is measured from the beginning of Device A transmitting the ranging message (
in
Figure 1) until the reception of the replied signal back from Device B (
in
Figure 1). Therefore, the TOF for the SS-TWR method can be obtained as:
2.2. SDS-TWR
The round-trip time of double-sided TWR [
3,
18] (
Figure 1) can be formulated as:
where
and
are the true round-trip times of a signal measured at Device A and B, respectively.
and
are the true reply times measured at Device A and B, respectively.
By combining Equations (
3a) and (
3b), the resulting TOF for SDS-TWR or DS-TWR can be expressed as:
In DS-TWR, the ranging time for a single measurement is approximately less than twice as long as SS-TWR due to the additional reply time, as depicted in
Figure 1.
2.3. AltDS-TWR
The AltDS-TWR method [
4] shares the same core concept as Equations (
3a) and (
3b) from
Section 2.2 (
Figure 1), as follows:
However, instead of combining the two equations, the AltDS-TWR method is achieved by multiplying Equations (
5a) and (
5b) as:
By simplifying the equation, the
is obtained as follows:
The detailed derivation of the formula can be found in Reference [
4].
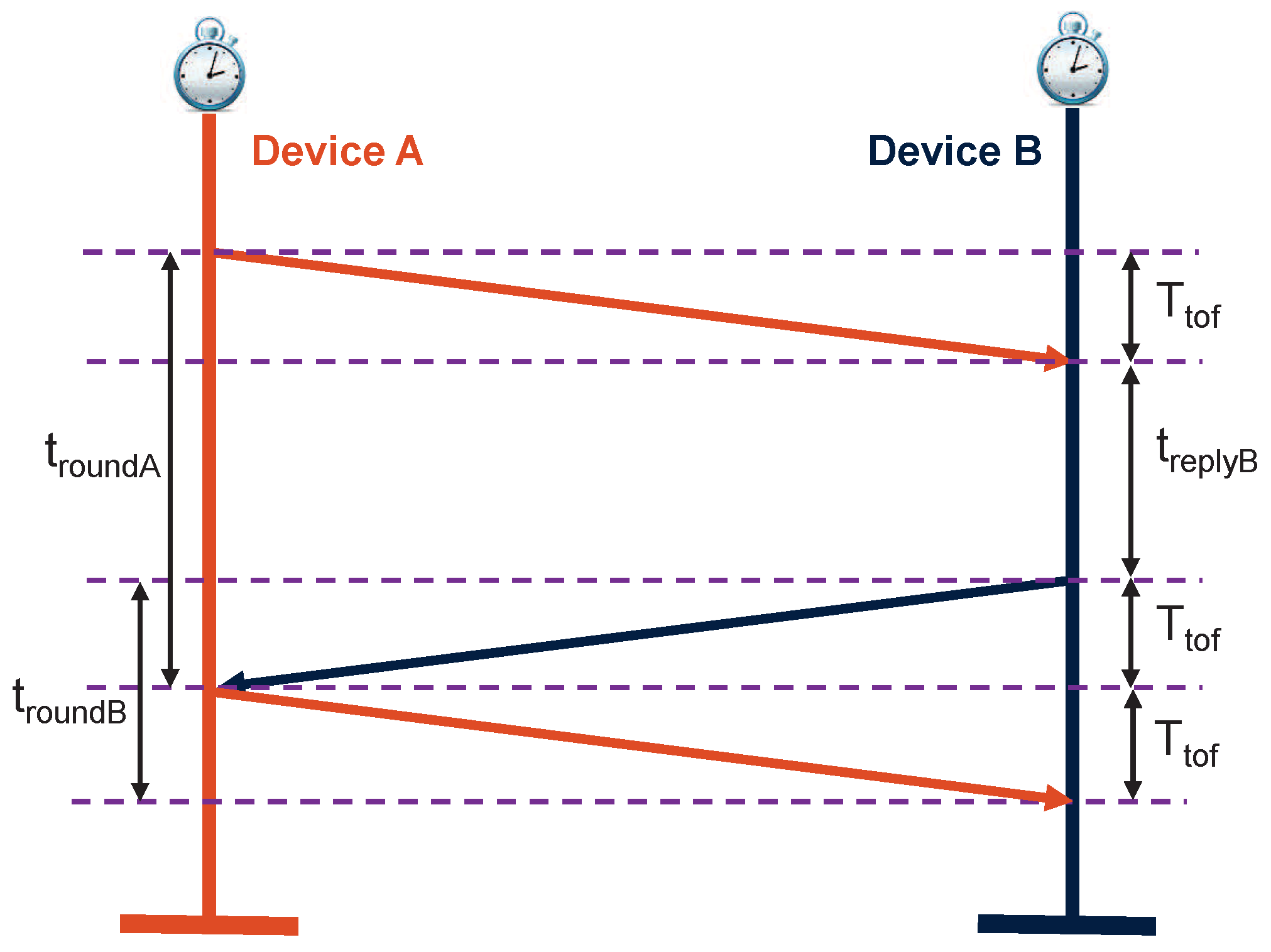
2.4. ADS-TWR
Asymmetric double-sided TWR [
19] (
Figure 2) can be formulated as follows:
By combining Equations (
7a) and (
7b), the
for ADS-TWR can be achieved as:
The major motivation behind the implementation of ADS-TWR is to reduce the ranging time of the system while attaining the same performance level as SDS-TWR or AltDS-TWR.
2.5. Conventional TOF Error Estimation Approaches
The existing conventional TOF error-estimation approach, i.e., the IEEE 802.15.4-2011 standard [
3] (pp. 258–275), is specifically only based on clock-drift error effects in TWR methods. The fundamental model can be simplified as in the following equations according to the method originally proposed in Reference [
18] and presented in Reference [
3]. Then, the method was later extensively applied and studied in References [
4,
8,
9,
19,
20]. The corresponding concept is depicted in
Figure 1. The representation of the equations is inspired by the work in Reference [
4].
where
and
are the estimated round-trip times of Devices A and B, respectively.
and
are the true round-trip times of Devices A and B, respectively.
and
are the estimated replied times of Devices A and B, respectively.
and
are the true replied times of Devices A and B, respectively.
and
are the clock-drift errors introduced by Devices A and B, respectively. It is conventionally assumed that
. The reason is that reply times are in the order of several milliseconds, while
is in the order of nanoseconds [
3].
Moreover, a linear algebra approach on error analysis of a co-operative position system using GPS and TWR was performed in Reference [
21]. The overall concept is interesting because the presented method can be used as a transition system that bridges the localization systems of UWB (indoor) and GPS (outdoor). However, error analysis performed for TWR in the work is too shallow. The authors assumed in their work that, firstly, clock-drift errors are compensated just by using the SDS-TWR method, and secondly, ranging measurement error is purely white Gaussian noises. This assumption is too broad to reflect the actual TOF error in the TWR method. In addition, the error model and protocol specifically for the parallel double-sided TWR (PDS-TWR) method were performed in Reference [
12]. The authors clearly sketch the source of error in two phases, namely, the ranging and localization processes, and focused on the former phase. Then, the variation of ranging error upon symmetric and quasisymmetric cases are discussed. It was proven in their work that PDS-TWR outperforms SDS-TWR. However, the error term used in their proposed model is unclear, which is defined as the difference between a duration measured with the PHY of a node and real duration (
). In addition, the presented error model is not generic and defined only for PDS-TWR method.
8. Discussion
In the last decade, SDS-TWR was the most highlighted TWR technique in the literature. The reason is that it provides an impressive output of TOF error against clock drifts when reply times (
and
) are symmetric. SDS-TWR was so popular that it even became a kind of standard. This means that, whenever a new TWR technique emerges, its performance is benchmarked with SDS-TWR as in References [
4,
7,
8,
9,
10,
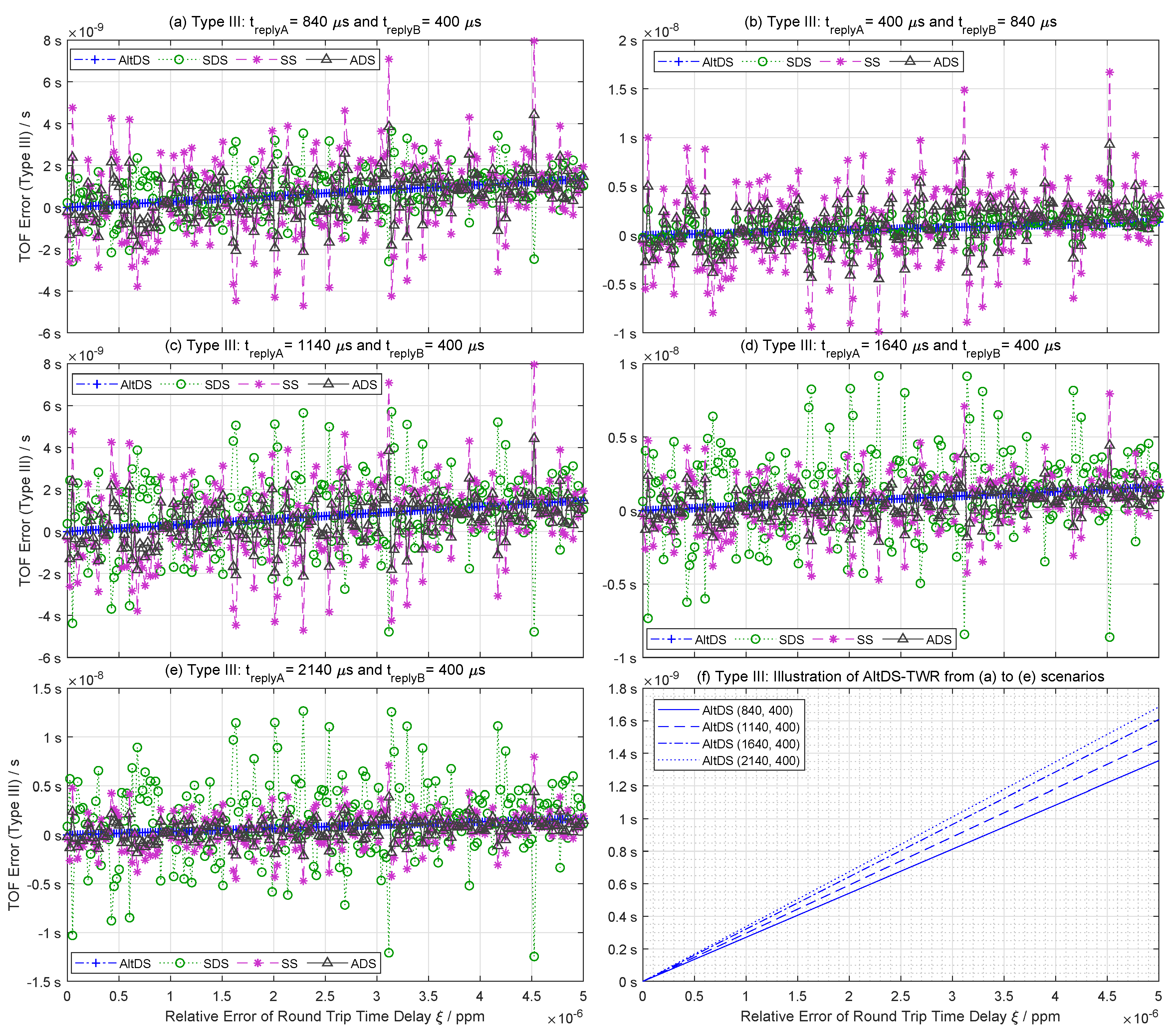
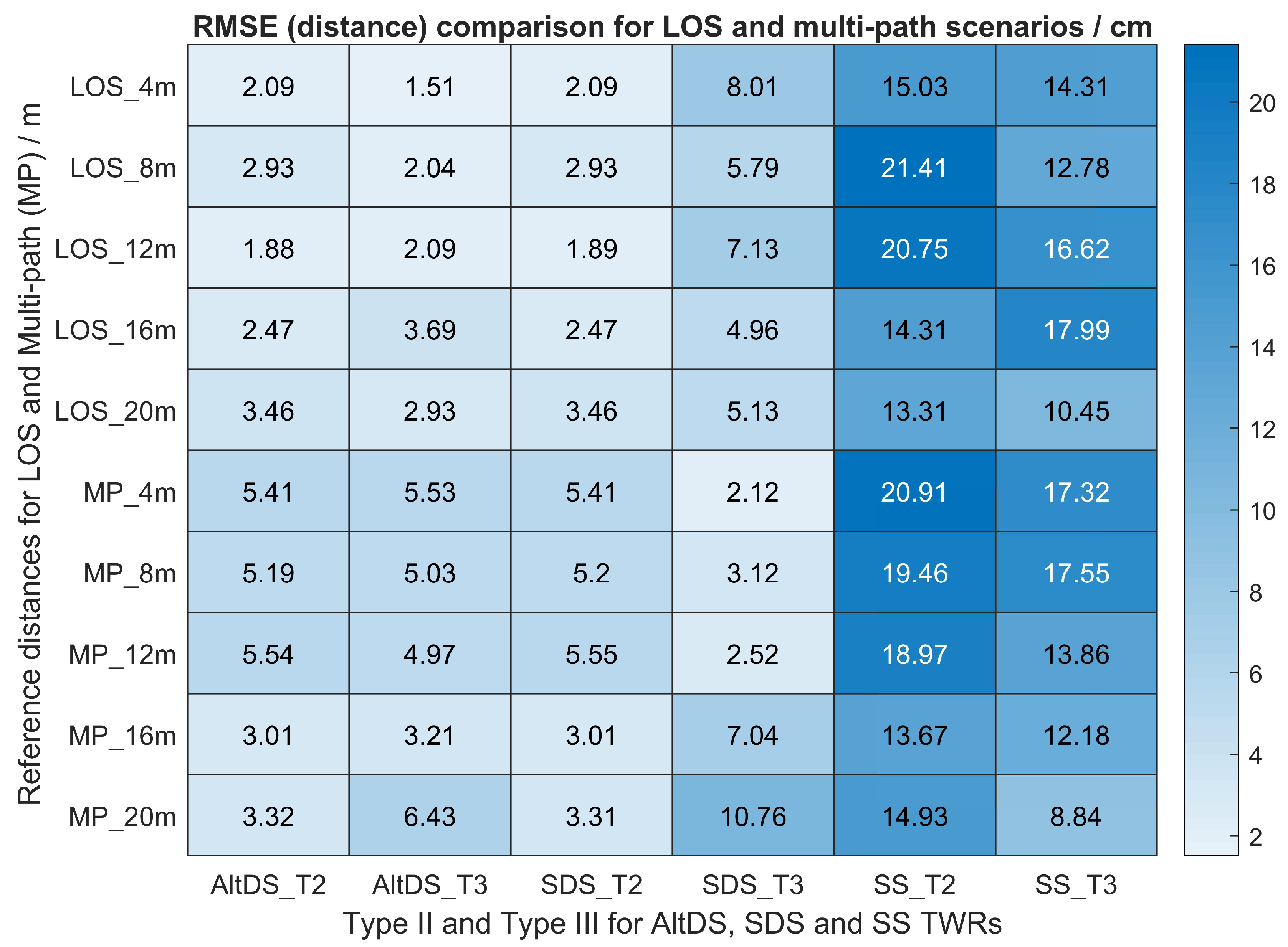
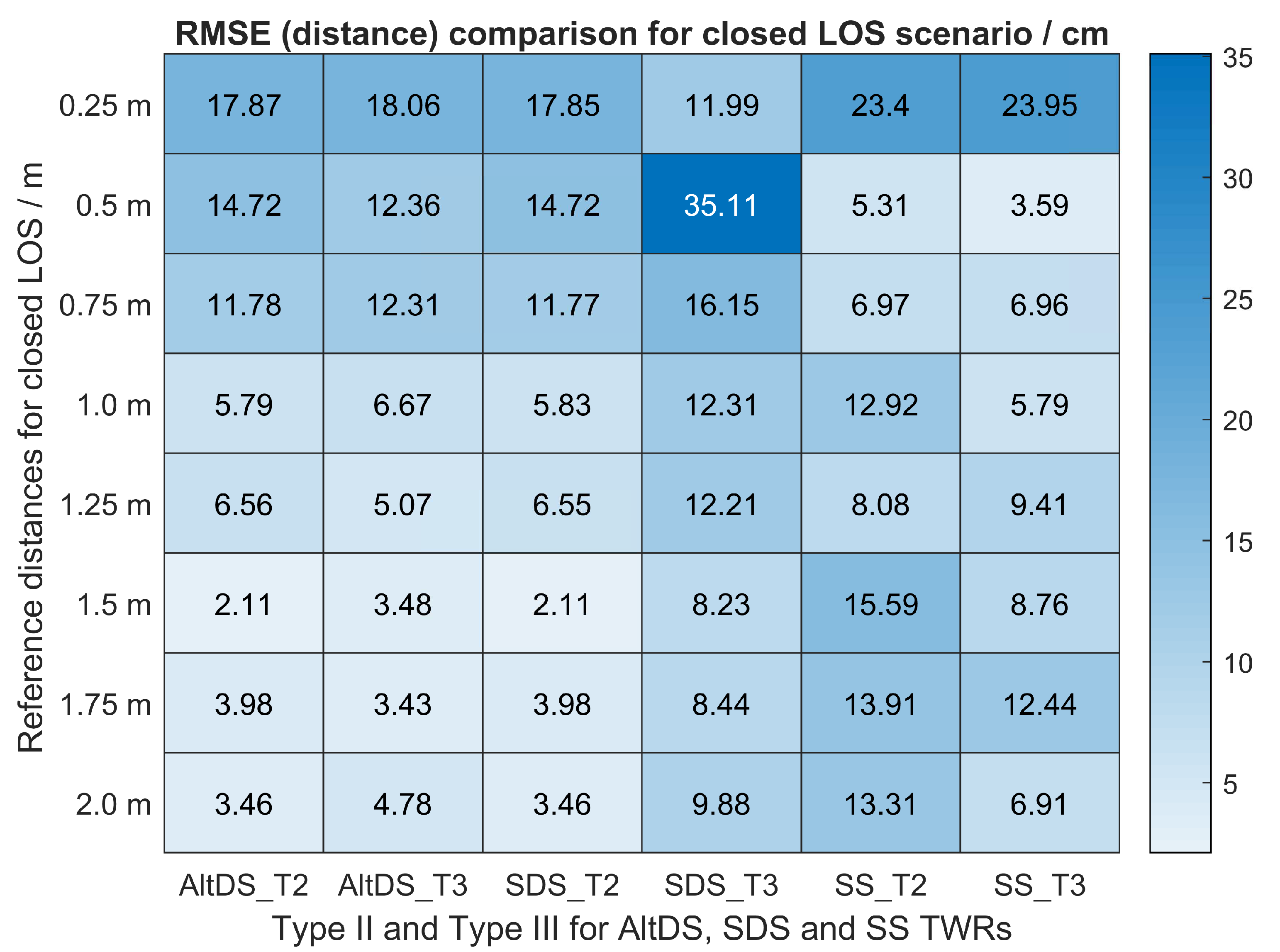
11]. However, SDS-TWR only provides robust TOF outputs when reply times are symmetric. When the symmetry in reply time is unachievable, it encounters severe error effects (
Figure 5 and
Figure 13,
Table 7). In fact, this is a major drawback and the pitfall of the SDS-TWR method. The constraint on strict symmetry in SDS-TWR has also been addressed in References [
7,
31].
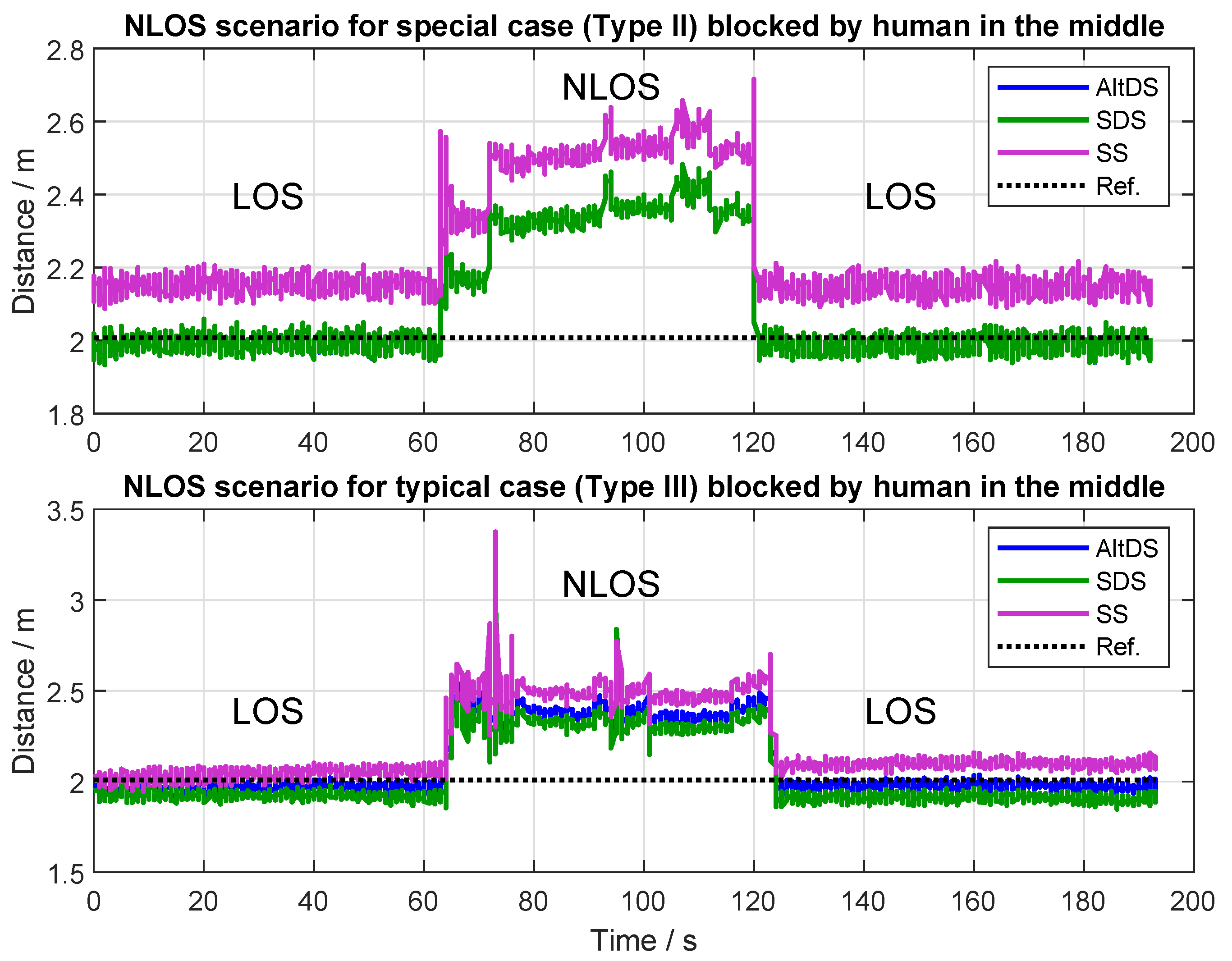
In contrast, we found that AltDS-TWR method was robust against clock drift in any tested condition (
Figure 4,
Figure 5 and
Figure 13 and
Table 7). In general, minimal reply times (
and
) and relative delay errors of round-trip time (
and
) are desirable at any condition in every evaluated TWR method. The reason is that, the shorter the mentioned time in the system is, the better the ranging accuracy (
Figure 4 and
Figure 5). Note that the default (out of the box) setup achieved from Decawave’s software was used in the typical-case (Type III) experiments in LOS, close LOS, and multipath scenarios, except for the variable reply time conducted in
Section 7.3.1.
Nonetheless, we proved that the corrupting effect of the delay in reply time does not affect distance-estimation accuracy in AltDS-TWR (
Section 7.3.1). This point is important because the current state of the art in UWB-based localization systems only focuses on the accuracy of the positioning algorithm. The available resource space of the data payload section in MAC layer [
3] (p. 57), [
22] (p. 220) are not used in most of the system-level applications presented in the literature. To mention a few as examples, the system implementation of UWB in References [
32,
33,
34,
35] mainly focus on the accuracy of the positioning algorithm by assuming that no payload is included in data communication except for necessary timestamps to be used in the positioning algorithm. Therefore, if the sensor data should also be transmitted, secondary wireless technology is used in such a system.
AltDS-TWR uncovers the ability to provide both positioning and sensor data on the payload of a single UWB system without loss of accuracy in the positioning algorithm. This further ensures that AltDS can be used in sensor systems with nondeterministic processing time. For instance, variation of reply time, provided in
Table 7 in
Section 7.3.1, can be thought of as a representation of sensor data processing time for wireless communication systems. As an example application, AltDS-TWR can be used in a UWB-based body-sensor network in sports analysis, where position and sensor data from a mobile node are necessary to access in the central server (coach) and analyze the performance of the athlete. Note that it could take unpredictable processing time for reading the data from the sensor depending on the hardware in such a scenario.
Moreover, AltDS-TWR is preferred in real-world scenarios because it is robust against variation of reply time and clock drifts (
Section 6 and
Section 7). Therefore, we conclude that the performance of the AltDS-TWR method is the most reliable between the four evaluated TWR methods, under the evaluation made in our numerical and experimental development at different scenarios.
It should also be noted that the relative error presented in the simulation results (
Section 6) includes all delays (PTD, PATD, TTD, and RTD) mentioned in
Section 3.1. However, the relative errors regarding TTD and RTD were excluded in the experiment results (
Section 7). In practice, a certain approximately constant delay error (with regard to a complete hardware setup) can be identified by evaluating two transceivers under the known ground-truth reference distance in a pure LOS scenario. The procedure of eliminating this constant, which is subtracting the mentioned constant from the measured (estimated) TOF value to match with the ground-truth reference distance, is typically called an aggregated antenna delay calibration in the world of UWB hardware implementation [
29]. This corresponds with the elimination of TTD and RTD delays in our case, which was calibrated before measurement was started, as stated in
Section 7.1.
Based on the evaluation results presented in this paper, a few recommendations can be drawn as follows: Firstly, distance should not be smaller than . The anchor (fixed) nodes should be placed far away from the dedicated region so that the distance between anchor and mobile nodes is always greater than . Secondly, a fairly small distance error (less than 10 cm) from both AltDS- and SDS-TWRs can be achieved if the difference between the reply times () is less than 400 . Thirdly, AltDS-TWR is the only solution in the evaluated TWRs when the nondeterministic processing time (e.g. sensor-data reading) are expected in the positioning system.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}