Abstract
Two expanding areas of science and technology are citizen science and three-dimensional (3D) printing. Citizen science has a proven capability to generate reliable data and contribute to unexpected scientific discovery. It can put science into the hands of the citizens, increasing understanding, promoting environmental stewardship, and leading to the production of large databases for use in environmental monitoring. 3D printing has the potential to create cheap, bespoke scientific instruments that have formerly required dedicated facilities to assemble. It can put instrument manufacturing into the hands of any citizen who has access to a 3D printer. In this paper, we present a simple hand-held device designed to measure the Secchi depth and water colour (Forel Ule scale) of lake, estuarine and nearshore regions. The device is manufactured with marine resistant materials (mostly biodegradable) using a 3D printer and basic workshop tools. It is inexpensive to manufacture, lightweight, easy to use, and accessible to a wide range of users. It builds on a long tradition in optical limnology and oceanography, but is modified for ease of operation in smaller water bodies, and from small watercraft and platforms. We provide detailed instructions on how to build the device and highlight examples of its use for scientific education, citizen science, satellite validation of ocean colour data, and low-cost monitoring of water clarity, colour and temperature.
1. Introduction
Two of the oldest instruments in optical oceanography are the Secchi disk [1] and Forel Ule (FU) colour scale [2,3]. The Secchi disk is a white disk that is lowered into the water and the depth at which it disappears and reappears from sight is logged. This depth is proportional to the clarity or transparency of the water. The FU colour scale is used to classify the colour of natural waters. It consists of 21 colours ranging from blue to green to yellow to brown, and is used alongside the Secchi disk with the observer typically recording the colour of a submerged Secchi disk (at roughly half the Secchi depth). A detailed history of both the Secchi disk and FU colour scale can be found in works of Wernand [4], Wernand and van der Woerd [5] and Wernand and Gieskes [6].
Despite the establishment of precision optical instruments designed to measure the colour and transparency of water digitally, the Secchi disk and FU colour scale are still frequently used in modern times, owing to their simplicity, low cost and continuity with historical measurements starting back in the 19th century. Measurements of Secchi depth and FU colour have been used to monitor decadal and centennial changes in turbidity, ocean colour and phytoplankton chlorophyll concentration (e.g., [7,8,9,10,11,12,13]). Secchi disk and FU colour theory have also been applied to satellite observations of ocean and lake colour to map the Secchi depth and FU colour at synoptic scales (e.g., [14,15,16,17,18,19,20,21,22]).
Unlike precision electronic instruments, the observer is implicitly connected with a Secchi and FU measurement, since both these measurements are dependent on the psychophysiology of the human eye-brain system and the individual’s perception of colour and contrast [23]. This can cause additional uncertainties, for instance from possible deviations among individuals, yet the direct engagement ensures that the observer has some authentic understanding of the measurement process. The Secchi depth and FU colour scale are thus useful tools for teaching the basic concepts of optical oceanography, teaching the measurement process, and for citizen-science-based projects (e.g., [24,25,26,27,28]). Lottig et al. [24] revealed geographic patterns and long-term trends in lake clarity in the US, based on multi-decadal observations of the Secchi depth, collected voluntarily by citizens. Other citizen science projects have demonstrated the use of citizen Secchi depth and FU observations for applications such as the validation of satellite ocean colour data [26,27,28]. Citizen science projects involving the use of a Secchi disk require the participating groups or individuals either to purchase a Secchi disk or construct their own. Owing to their size (typically 20–30 cm in diameter), conventional Secchi disks can be relatively cumbersome to use.
3D printing is a process in which successive layers of material are laid down onto a surface to form virtually any shape from a digital model. Basic desktop 3D printers can be purchased at low cost (as little as $500 [29]), making desktop computer-aided manufacture possible in any home or academic institution. 3D printers have greatly benefited many areas of science. They have been used in molecular science to investigate and reproduce molecules and structures [30,31], in paleontology and archaeology for reproducing complex skeletons [32,33], in biology for producing human cells and tissue structures [34,35], in chemistry to initiate chemical reactions for chemical synthesis and analysis [36], and in education to engage students to undertake careers in science and technology [37].
Two exciting features of basic 3D printers are: (i) Their ability to manufacture customized scientific instruments that previously needed dedicated facilities to produce [36,38], and (ii) the ability to standardise home-made scientific instruments, previously manufactured using different materials and tools. Three-dimensional printing thus has the potential to revolutionise the design and use of scientific equipment. Whereas commercialised 3D printers vary in cost, technology and capabilities, they are compatible in terms of input formats [39], meaning that precise information on the construction of scientific equipment can easily be disseminated [38]. The use of 3D printers to manufacture customized scientific instruments is apparent in some areas of environmental science (e.g., see [38]), however, it is relatively untapped in limnology and oceanography, despite unprecedented opportunities [40]. For a recent review of applications of 3D printing technologies in oceanography, the reader is referred to the work of Mohammed [40].
In this paper, we present a simple hand-held, pocket-sized device (hereafter denoted the mini-Secchi disk), designed to measure water clarity (Secchi depth) and colour (FU scale) in lake, estuarine and nearshore regions. This standardised device is partly manufactured using a basic 3D printer and made with marine resistant materials. It is inexpensive to produce and easy to use. The size and weight of the device means the instrument is accessible to a range of recreational water users previously not capable of measuring water transparency and colour using conventional instruments (e.g., divers, kayakers, surfers and stand-up paddle boarders). We provide detailed instructions on how to build the device and demonstrate some of its applications.
2. Materials and Methods
2.1. Mini-Secchi Disk Development
Our objective was to develop a small, light and convenient-to-use Secchi disk and FU colour scale, for use in lake, estuarine and nearshore environments. Our progression from a standard Secchi disk through to the development of the current mini-Secchi disk is illustrated in Figure 1. We started by making a series of prototypes based on the use of retractable tape measures (Figure 1b,c). We then made the decision to reduce the diameter of the Secchi disk from its standard size (30 cm for the ocean, 20 cm for lakes) to 10 cm. This decision was based on two reasons: (i) By making the size of the disk smaller we could make the entire device pocket-sized, and (ii) consideration of the angular subtense of the disk’s radius (, where r is the disk’s radius and the Secchi depth [23]) in lake and nearshore turbid waters. To expand on the latter point, a 30 cm diameter disk is typically employed in the ocean. Here, the average Secchi depth is around 25 m (estimated by application of Equation (17) of Morel et al. [18] to a NASA MODIS-AQUA global chlorophyll-a climatology and taking the global average value for all the Secchi depths so-obtained), which yields a of around 0.006. This value of , in combination with a disk diameter of 10 cm, would lead to a Secchi depth of 8.3 m. Considering the majority of the world’s lakes (and likely much of the world’s estuaries and nearshore waters) have a Secchi depth m [24], it seems reasonable, for the sake of convenience, to use a 10 cm disk in these environments. In other words, for use in lakes and estuaries, where the water is typically more turbid than in the open ocean, it is acceptable to use a Secchi disk of smaller radius than is deployed conventionally in the ocean. Of course, if we were to compare Secchi depth data collected from the mini-Secchi disk with other records collected using different sized disks, we might need to consider a small correction in measurement for a change in disk size, but this would be possible given knowledge of Secchi depth theory [20,23,41]. However, such a correction may not be required always (see discussion of this in Hou et al. [41], who show that the disk size does not significantly alter the Secchi depth).
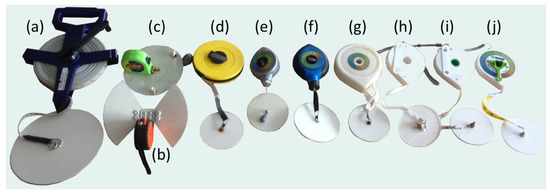
Figure 1.
Mini-Secchi disk prototypes. (a) Traditional Secchi disk for use in lakes and nearshore waters (20 cm sized Secchi disk); (b) and (c) prototypes based on the use of retractable tape measures and foldable Secchi disks; (d–f) prototypes based on attaching a 10 cm disk to a series of small manually-operated tape measures and chalk lines; (g–i) initial 3D printed prototypes with 10 cm Secchi disks; and (j) the current 3D printed version of the mini-Secchi disk.
Having reduced the size of the disk, more prototypes were constructed by attaching a 10 cm disk to a series of small manually-operated tape measures and chalk lines (Figure 1d–f) which were found to operate satisfactorily. With the goal of making the device compact and convenient to use, we tested a series of 3D printed designs (Figure 1g–i), before finally settling on a specific design (Figure 1j).
2.2. The Mini-Secchi Disk
A rendering and exploded drawing of the mini-Secchi disk is provided in Figure 2. The mini-Secchi disk is essentially a manually-operated tape measure with a 10 cm white Secchi disk and 100 g brass weight attached to the end of the tape. The weight is manufactured using a metal lathe (or can be computer numerical-control machined) and the Secchi disk is cut out from white polypropylene sheet using a bandsaw or coping saw. The measuring tape, purchasable online, is approximately 8 m long and wraps around a 3D printed bobbin. The tape and bobbin lock into a 3D printed casing. The bobbin is attached to a handle (also 3D printed) that is used to wind the tape in and out of the casing. A polypropylene finger strap and nylon lanyard are attached to the casing, to operate and transport the device safely. A vinyl-laminated Forel Ule colour scale sticker is placed on the outside of the casing (handle-side) and the entire device is fixed together using stainless steel or brass fixings.
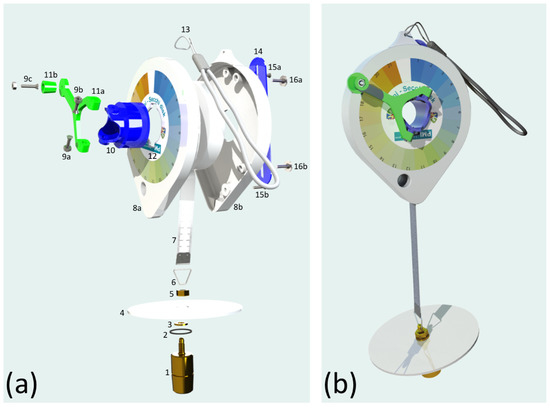
Figure 2.
An exploded drawing (a) and rendering (b) of the mini-Secchi disk. Numbers refer to components (see Table 1 for description) and are listed as follows: 1. Weight; 2. Weight O-ring; 3. Weight washer; 4. Secchi disk; 5. Weight bolt nut; 6. Weight attachment circlip; 7. Tape measure; 8a,b. Mini-Secchi casing; 9a,b,c. Fixings; 10. Bobbin; 11a,b. Handle; 12. Colour scale; 13. Lanyard; 14. Finger strap; 15a,b. and 16a,b. Fixings.
The disk, weight and handle of the tape measure are designed to slot neatly into the chassis of the device, making it very compact and convenient to store and transport. The weight has a small O-ring in the centre that ensures it locks neatly into the bobbin. All 3D printed components are made from polylactic acid, a thermoplastic devised from renewable resources or natural starch. As well as having good structural properties, this material is biodegradable and thus can be composted. The stereolithography files (STL) for all 3D printed parts (and the weight) are provided in Supplementary data 2 and 3 (see Table 1) and can be used for manufacture in most 3D printers. For the mini-Secchi disk, we used Ultimaker 2 and 2+ printers, which were found to be very reliable and robust and relatively low-cost. We used an open source 3D printing software called Ultimaker Cura. The settings were tailored to print more than one part at a time. Cura is continually updating its software. In the latest version the settings can be adjusted to ensure a high-quality print depending on the colour, type of plastic, and quality of plastic you are printing with. There are other 3D printing software available for use, some unique to the brand of printer you use, others open source. When printing, we recommend using the highest print quality you can apply, and if you are making a single mini-Secchi device, to print parts individually. It is important to know your machine and software well prior to printing, and we recommend first running some test prints.

Table 1.
Components of the mini-Secchi disk.
Table 1 provides extensive details on all the components of the mini-Secchi disk: Dimensions, materials used, how each component is manufactured or purchased, and links to all Supplementary data files required to manufacture the device. Figure 3 illustrates some of the key steps in the manufacturing process.

Figure 3.
Photos of keys steps in the manufacturing process. (a) Ultimaker 2 printers used to 3D print components of the mini-Secchi disk. (b) An example 3D print of the casing, bobbin and handle of the mini-Secchi disk. (c) Assembly of the components of the mini-Secchi disk after 3D printing the parts and printing the vinyl colour scale sticker, manufacturing the weight and the Secchi disk, and procuring the measuring tape. (d–g) Constructing the mini-Secchi disk. Having manufactured the weight (d), using either a metal lathe or a CNC machine, and bobbin (glued and finished), the weight is fitted into the bobbin and the measuring tape is stitched onto the bobbin (e). The bobbin is fitted into the casing (f) and measuring tape enclosed between the two sides of the casing (g) before being locked in place with the finger strap using the fittings. (h) The colour scale sticker is added before the handle of the device is fitted, lanyard added, and disk and weight attached to the measuring tape. (i) Examples of mini-Secchi disks produced for the REVIVAL project (https://pml.ac.uk/Research/Projects/REVIVAL).
2.3. Operating the Device
To operate the device, the lanyard is slipped over the wrist (Figure 4a) and the weight is pushed out from the bobbin (Figure 4b). Once the disk is detached (Figure 4c), one or two fingers are slipped under the finger strap for support (Figure 4d). The handle is detached from the casing and flipped 180 degrees (Figure 4e), before it is used to wind the tape measure in and out of the casing (Figure 4f). When the measurement is completed, this procedure is reversed and the device can be easily transported and safely stored.
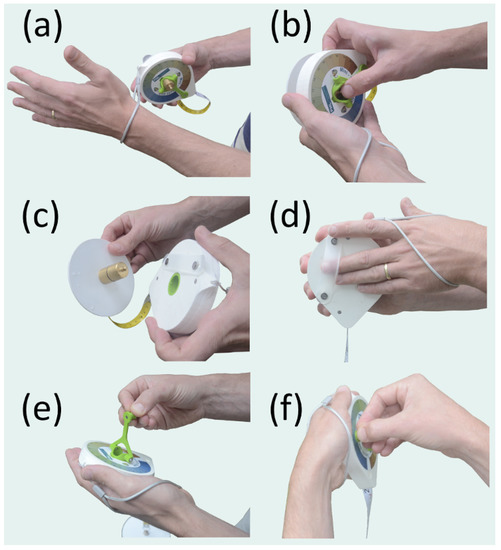
Figure 4.
Operating the mini-Secchi disk. (a) Lanyard is slipped over the wrist and (b) weight pushed out from the bobbin. (c) Disk detached and (d) holding hand fingers slipped under the finger strap. (e) Handle is detached from the casing and flipped 180 degrees. (f) Handle is used to wind the tape measure in and out of the main body of the mini-Secchi disk.
The Secchi depth is measured using standard protocols: The white Secchi disk is lowered into the water and the depths at which it disappears and reappears are recorded (Figure 5a). The Secchi depth is computed by averaging these two depth measurements. It may be feasible to view the depth of disk disappearance and reappearance directly from the measuring tape at the water surface. If this is not feasible, the distance from the hand-held device (casing) to the water surface (DO) can be measured, as well as the total distance (TO) from the device to the depth at which the disk disappears and reappears. The Secchi depth can then be computed by subtracting DO from TO (Figure 5a). Note if the latter is done, it is essential to measure DO accurately and to keep DO constant throughout the measurement (e.g., by maintaining arm at 90 degrees). For accurate Secchi depth readings, the observer should avoid sun glint regions and shadows, ideally conduct the measurement closer to mid-day (or at the very least record the time and location which can be used to compute sun angle), allow their eyes to adapt near to the Secchi depth, write down sky conditions, and repeat measurements to improve precision. The disk must sink vertically though the water for accurate Secchi depth readings. The weight of the mini-Secchi (100 g) should be sufficient for vertical deployment from a fixed platform in waters with low current speed. However, in stronger currents, or in cases where the platform may be moving (e.g., from a boat) extra weight will be required to avoid the disk sinking at an angle. One of the weight designs provided in Supplementary data 1 and 2 has an attachment where extra weight can easily added in such circumstances (see Figure 6a,b).
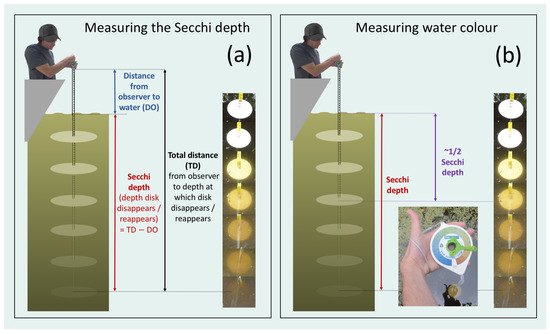
Figure 5.
Measuring Secchi depth and water colour with the mini-Secchi disk. (a) Measuring the Secchi depth. (b) Measuring water colour at half the Secchi depth.
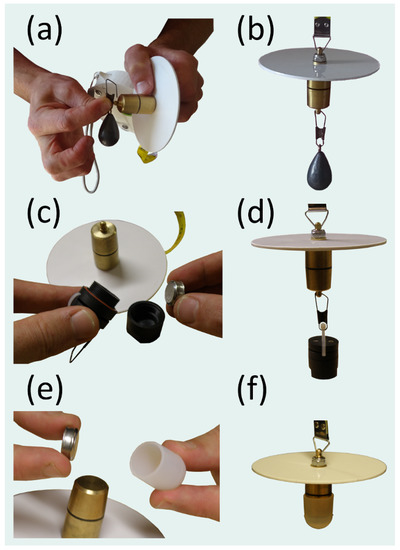
Figure 6.
Additional weight and sensors can be added to the mini-Secchi disk. (a–b) Shows how additional weight (a standard fishing weight) can be attached to one of the weight designs of the mini-Secchi disk for operation in currents, or in cases where the platform may be moving (e.g., from a boat). (c–d) An iButton housed in a Thermochron waterproof capsule (DS9107) is attached to one of the weight designs of the mini-Secchi disk for measuring water temperature. (e–f) An iButton housed in a Thermochron sinking silicon capsule (Th-Silenc) is attached to the weight of the mini-Secchi disk for measuring water temperature.
The colour of the water is measured by looking at the colour of the Secchi disk at roughly half the Secchi depth, matching it to the closest colour on the colour scale (Figure 5b) and noting the corresponding number. Once the disk is at half the Secchi depth, it is relatively straight-forward to turn the hand holding the device so that your palm is facing up and the scale is visible and you can see the disk (see photo in Figure 5b). After operating the device, the mini-Secchi should be cleaned with fresh water and stored in a dry location. To remove any dirt from the white disk a little washing up liquid may be used. For maintenance, we also recommend occasionally using a little silicon lubricant on the weight, the inside of the bobbin where the weight locks in, and at the end of the measuring tape.
In addition to measuring the Secchi depth and water colour, the mini-Secchi disk may also be used as a platform for deploying other sensors. Figure 6 show two examples of attaching an iButton temperature logger (DS1922L Thermochron D/logger, accuracy of ±0.5 °C, operating range −40 °C to +85 °C) to the weight of the mini-Secchi disk for measuring water temperature. In Figure 6c,d, the iButton is housed in a Thermochron waterproof capsule (DS9107) and attached to the weight of the mini-Secchi disk. In Figure 6e,f, the iButton is housed in cheaper Thermochron sinking silicon capsule (Th-Silenc) which slips onto the standard weight of the mini-Secchi disk. For the latter, and when using the weight with attachment, the Thermochron silicone enclosure with handle (Th-foenc) could also be used, either by sliding the Th-foenc silicon casing over the weight (as in Figure 6f) or by attaching the Th-foenc handle to the weight attachment, similar to Figure 6d. If using these temperature sensors, it is important for the user to quantify the response time of the housed iButton, to allow enough deployment time for the iButton to respond to the water temperature, and to ensure that the housed iButton is shaded by the disk, to minimise direct heating of the housed iButton by sunlight.
2.4. Testing Applications of the Mini-Secchi Disk
In this section we describe four exercises that highlight applications of the mini-Secchi disk.
(1) To demonstrate the use of the mini-Secchi disk as a tool for characterising spatial variations in lake clarity and colour, it was deployed alongside a Conductivity, Temperature and Depth (CTD) rosette sampler on a two-day field trip through Vembanad lake in Kerala, India, on the 30th and 31st May 2018. In addition to measuring conductivity (from which salinity was derived) and temperature, the CTD rosette sampler was also equipped with a WET Labs ECO triplet that included a backscattering sensor for measuring water turbidity. Over the course of the two days, and between 08:20 and 16:35 local time (GMT + 5.5 h), surface waters (top 1 m) of 13 stations were sampled spanning the length of the lake and other parts of its wetland system (Figure 7a). The mini-Secchi disk was deployed at each station alongside the CTD, and the Secchi depth and FU colour were recorded.
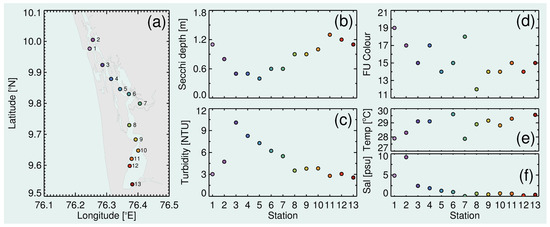
Figure 7.
Deployment of the mini-Secchi disk in Vembanad lake on the 30th and 31st May 2018. (a) Stations sampled with the mini-Secchi disk and CTD rosette sampler equipped with a WET Labs ECO triplet. (b) Secchi depth readings using the mini-Secchi disk, (c) water turbidity at the surface (top 1 m), and (d) Forel Ule colour readings using the mini-Secchi disk. (e) Surface (top 1 m) temperature (Temp) and (f) salinity (Sal) for the 13 stations sampled.
(2) The size of the mini-Secchi disk means the instrument is accessible to a range of recreational water users previously not capable of measuring the Secchi depth and water colour using conventional instruments. This is demonstrated here in the nearshore using a recreational surfer. Between 28th February and 4th March 2013, a mini-Secchi disk (prototype version with 10 cm diameter disk, Figure 1) was deployed at Playa Langosta in Costa Rica (outside the surf zone) by a recreational surfer during three surfing sessions (Figure 8a,b). The surfer carried the mini-Secchi disk in a small waist bag (bum-bag or fanny-pack). Between 11:00 and 14:00 local time (GMT-6 h), the surfer was instructed to paddle seaward of the surf zone and record the Secchi depth and water colour using the mini-Secchi disk. Each deployment was repeated five to seven times, with the mean and standard deviation of the Secchi depth computed. The FU colour was also logged for each session. As complementary data, wind speed measurements were taken from a nearby weather station (Sede de Guanacaste, Liberia, data extracted from https://www.wunderground.com/). Three-hourly wind speed measurements centred on the time of each surfing session (for the 28th February, and 3rd and 4th March), or centred at local noon for the days of no deployment (1st and 2nd March), were extracted and the average and standard deviation of these measurements were computed. Wave height data were also extracted for Langosta, Costa Rica, from a surf forecast website (Langosta historic forecast, https://www.magicseaweed.com/ pro version) which uses a wave model forced with observations. The average, minimum and maximum wave heights were taken centred on the time of the surfing session, or at local noon for the days of no deployment. Finally, two photographs taken of the surfer surfing on the 28th February and 3rd March were also utilised for qualitative analysis.
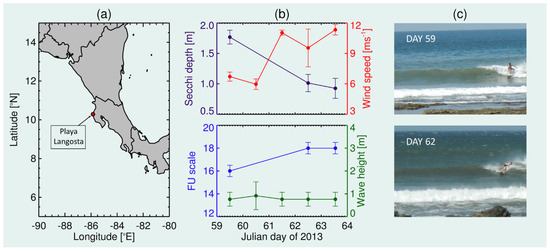
Figure 8.
Deployment of the mini-Secchi disk by a surfer. (a) Location of Playa Langosta in Costa Rica. (b) Data collected using the mini-Secchi disk (Secchi-depth and FU colour scale) between 28th February and 4th March 2013 at Playa Langosta. Wind speed data from nearby weather station (Sede de Guanacaste, Liberia) and wave height data at Langosta (using wave model forced with observations) are also shown. Uncertainties (error bars) for the Secchi depth and wind speed are based on standard deviations of measurements during the surfing session (5–7 for the Secchi depth), or around local noon for wind speed for the days of no deployment. Uncertainties (error bars) in wave height represent the range in wave heights from the wave model data. Uncertainties (error bars) in FU colour scale were set to half an FU number based on reproducibility results in Wernand and van der Woerd [5]. (c) Photos taken of the surfer at Playa Langosta in Costa Rica on the 28th February (Day 59) and 3th March (Day 62).
(3) To demonstrate the use of the mini-Secchi disk as an educational tool for teaching the concepts of aquatic optics, and to quantify the average deviation in Secchi disk readings between individuals, we constructed a simple experiment that could be conducted in any classroom. A standard-sized indoor dustbin was filled with water and a 10 cm white Secchi disk was placed at the bottom of the bin. We then added drops of dissolvable navy blue food colouring, purchased from a supermarket, while stirring the water until the white disk was no longer visible. We then removed the white disk. Participants were then asked to record the Secchi depth of the dustbin water using the mini-Secchi disk. This experiment was conducted at a scientific meeting of the Challenger Society and Remote Sensing and Photogrammetry Society Marine Optics Special Interest Group on the 16th December 2013 (“A kaleidoscope of colour: From the turbid to the oligotrophic”), where 18 participants took part, and during a design and technology lesson at a secondary school (at Chatham and Clarendon Grammar School) on the 4th July 2014, where 12 participants took part (Figure 9). Although conditions remained constant during each experiment, the two experiments differed in the amount of food colouring used and in the light environment.
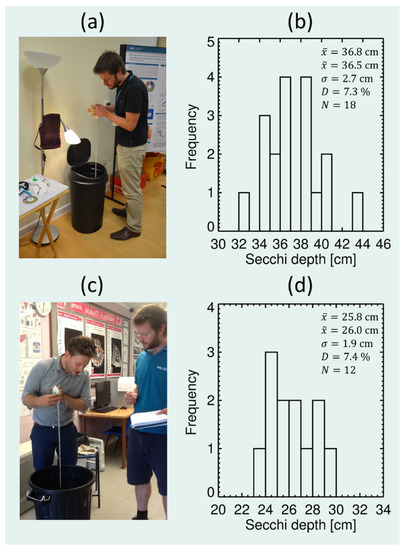
Figure 9.
Quantifying uncertainty arising from different individuals reading the Secchi depth. The experimental set up consisted of a mini-Secchi disk and a bin filled with water and food colouring. (a) Experimental set-up at the Challenger Society and Remote Sensing and Photogrammetry Society Marine Optics Special Interest Group (MOSIG) on the 16th December 2013. (b) Histogram of Secchi depth readings taken at the MOSIG meeting. (c) Experimental set-up during a design and technology lesson at a secondary school at Chatham and Clarendon Grammar School on the 4th July 2014. (d) Histogram of Secchi depth readings during the design and technology lesson. is the average Secchi depth, is the median Secchi depth, is the standard deviation of the Secchi depth readings, D is the percentage deviation (/) and N is the number of measurements.
(4) To demonstrate that the mini-Secchi disk can be used as a platform for deploying other sensors, we tested the accuracy of temperature measurements collected by attaching an iButton temperature logger to the weight of the mini-Secchi disk (see Figure 6c,d). These tests were conducted on the 28th Atlantic Meridional Transect (AMT) cruise. AMT is a programme that conducts oceanographic research during an annual voyage between the UK and destinations in the South Atlantic. AMT28 departed from the UK on 23rd September 2018 on the RRS James Clark Ross and arrived in the Falklands on the 29th October 2018. Twice a day (around pre-dawn and local noon), the ship stopped to conduct vertical oceanographic profiles of various biological, chemical and physical variables using a CTD rosette sampler. During these profiles, a Small Oceanographic floating Device (SOD) was deployed near the CTD rosette. The SOD is a small float with fins integrated for stability and two plugs for attaching rope to either side of the float (Figure 9a). On the topside, a 10 m rope was attached for lowering the SOD into the water. On the underside, there was a 1 m rope with a mini-Secchi disk attached. On the weight of the mini-Secchi disk an iButton temperature logger (DS1922L Thermochron D/logger), housed in a Thermochron waterproof capsule (DS9107), was attached (see Figure 6c,d and Figure 9a). The SOD was deployed for a 20 min period at 31 stations between 50° N and 4° S, spanning a temperature range of nearly 15 °C (Figure 10a). 1-Wire iButton software was used to launch the iButton prior to deployment and to upload temperature data. The first 7.5 min and last minute of data were removed, to discard any data collected when the iButton was coming in and out of the water and to allow plenty of time for the housed sensor to respond to the water temperature. The median of the remaining data was taken as the temperature reading from the iButton. For comparison with the iButton data, during each SOD deployment, we extracted the median water temperature from the ships underway CTD which samples continuously from the ship’s flow-through system at a nominal depth of 5 m, and also from the top 5 m from the profiling CTD (upward profile). According to the manufacturer’s specifications, the DS1922L Thermochron D/logger has an accuracy of ±0.5 °C. To test this and to remove any systematic bias in the loggers temperature measurements, it was calibrated against a NIST-traceable (and NPL-traceable) Hart Scientific 1504 temperature bridge and Themometrics ES 225 temperature probe (accurate to 0.003 °C at 24.85 °C) at two contrasting temperatures in a recirculating water bath [42], three times during AMT28.
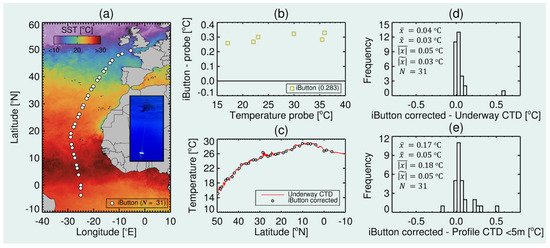
Figure 10.
Evaluating the accuracy of water temperature measurements from an iButton attached to the mini-Secchi disk. (a) Deployments locations of the Small Oceanographic floating Device (SOD, see photo) with iButton and mini-Secchi disk on AMT28, overlain onto a Sea Surface Temperature (SST) monthly composite of October 2018 from the MODIS-Aqua satellite [61]. (b) Results from the comparison between the housed iButton and the NIST-traceable probe at different temperatures in a recirculating water bath. The value 0.283 represents median difference in temperature (°C). (c) Along-track SST from the underway CTD system with the iButton data (corrected following removal of systematic difference of 0.283 °C) overlain. (d) Histogram of the water temperature differences between the underway CTD and iButton on the mini-Secchi disk. (e) Histogram of the water temperature differences between the profiler CTD in the top 5 m (upcast) and the iButton on the mini-Secchi disk. Two outliers are not shown on the graph (1.19 and 1.72 °C). is the average difference, is the median difference, is the average absolute difference, is the median absolute difference and N is the number of samples.
3. Results and Discussion
3.1. Mini-Secchi Disk Applications
3.1.1. Capturing Spatial Variations in Lake Clarity and Colour
Results from the deployment of the mini-Secchi disk and CTD rosette sampler in Vembanad lake are shown in Figure 7. Surface salinity was highest towards the mouth of Vembanad lake (close to its entrance into the Indian Ocean) and decreased steadily towards the south of the lake (Figure 7f). Surface water temperature was lower (∼28 °C) at the mouth of the lake (Stations 1-2) and in the Muvattupuzha river (Station 7); elsewhere it was relatively constant (∼29 °C) (Figure 7e). Clear spatial variations in Secchi depth were found during the field trip (Figure 7b). Water clarity was highest near the mouth of the lake (Stations 1–2) and in its southern half (Stations 8–13). Water clarity was lowest (∼0.5 m) in the central to northern part of the lake (Stations 3–7). Secchi depth was inversely related to water turbidity (Figure 7b,c, , ) highlighting the use of the Secchi disk as a simple tool for quantifying turbidity. Variations in Secchi depth recorded during the field trip (average 0.84 m, range 0.4–1.3 m) were consistent with previous Secchi depth data collected in the Eramalloor region of Vembanad lake over an 11 month period in 2015–2016 (average 0.71 m, range 0.4–1.1 m; [43]). Forel Ule colour measurements (Figure 7d) indicated the northern part of the lake (Stations 1, 2 and 4), and the Muvattupuzha river (Station 7), were browner in colour than the southern part of the lake (Stations 8–10) during the field trip.
The Secchi disk and Forel Ule colour scale have a proven history in quantifying temporal and spatial variations in lake clarity and colour [22,24]. The data collected in Vembanad lake demonstrate that the mini-Secchi device can be used for collecting these measurements, but with the advantage of being a more convenient tool owing to its small size and compact design. Secchi depth and Forel Ule observations are increasingly being used for verifying remotely-sensed temporal and spatial variations in water clarity and colour [22,26]. They are thought to be particularly useful for ground truthing satellite data in lake regions with limited resources for monitoring, with local communities determined to help preserve the health of the lakes on which their lives are dependent. It is often these regions that are most vulnerable to anthropogenic problems such as eutrophication and to issues like climate change, and where an inexpensive, printable device such as the mini-Secchi disk could be of real use.
3.1.2. Recreational Water User Deployment in the Nearshore
Results from the deployment of the mini-Secchi disk at Playa Langosta in Costa Rica by a surfer are shown in Figure 8. During the five-day period, the surfer observed an increase in the FU colour (from 16 to 18) and a significant reduction in the Secchi depth (from 1.77 m to 0.92 m). The surfer noted that these changes coincided with an increase in wind speed, little change in wind direction (ENE direction, directly offshore) and no change in average wave height. These observations were verified with wind data from a nearby weather station (Sede de Guanacaste, Liberia) and data from a wave model forced with observations (Figure 8b). Furthermore, photographs taken of the surfer on the 28th February (Julian day 59) and 3rd March (Julian day 62) give further qualitative support to these results (Figure 8c), illustrating similar wave heights on these two dates, higher wind speeds on day 62 (see white caps in background of photo not seen in photo on day 59), and suggest an increase in turbidity and a change in colour between these dates (darker and browner waters on day 62). We speculate that the decrease in Secchi depth (increase in turbidity) and change in colour (toward browner, likely sediment dominated water) was caused by wind driven convection resulting in an increased entrainment of sediment from the seabed into the water column.
The surfer example (Figure 8) demonstrates that, owing to its small size and light weight, the mini-Secchi disk is accessible to a range of water users who were previously not capable of measuring the Secchi depth and FU colour using standard instruments. Recreational watersports users are a community who may benifit from using the mini-Secchi disk. Water clarity is important for activities such as diving, and water quality is a concern for all recreational watersports users. It has been estimated that there are as many as 10 million surfers [44] and 10 million SCUBA divers and snorkellers [45] globally. Recently, Brewin et al. [46] made an analysis of a selection of recreational activities that directly interact with the aquatic environment, and estimated 125 million people engage in these activities in the UK and US alone. There have been studies demonstrating that surfers [47,48,49], divers [50,51,52], stand-up paddle-boarders [53], and sailors [54] can contribute significantly to environmental data collection in aquatic waters. Furthermore, locations where these sports take place are important regions for marine biodiversity [55,56,57] and support various ecosystem services [58]. Tapping into recreational watersports using the mini-Secchi disk could help increase spatial and temporal measurements of water clarity and colour in these regions.
3.1.3. A Tool for Teaching Aquatic Optics
Results from the classroom experiments using a dustbin filled with water and food colouring are shown in Figure 9. The first experiment at the Marine Optics Special Interest Group meeting (Figure 9a,b), in which participants were scientists, yielded an average Secchi depth reading of 36.8 cm, a median of 36.5 cm and a standard deviation of 2.7 cm. The second experiment at the secondary school (Figure 9c,d), in which participants were predominately school children, yielded an average Secchi depth reading of 25.8 cm, a median of 26.0 cm and a standard deviation of 1.9 cm. Differences in Secchi depth readings between experiments were expected considering contrasting amounts of food colouring used and alternative light environments. Yet, the percentage deviation (standard deviation divided by the mean multiplied by 100) was very similar between the two experiments (7.3% and 7.4%) and suggests differences in Secchi depth measurements of around 7% caused by deviations among individuals in their perception of contrast. Interestingly, there was no evidence of difference in skill between scientists and school children.
The classroom experiment demonstrates how the mini-Secchi disk may be used as an educational tool for teaching the concepts of aquatic optics, how light is attenuated with increasing depth and how different individuals perceive contrast. Other classroom-based experiments could easily be developed using the mini-Secchi disk. For instance, using different bins with different coloured dyes could help ascertain differences among individuals in their perception of colour, qualify deviations among individuals in FU colour measurements, and how the 7% difference in the Secchi depth recorded here from deviations among individuals might vary with water colour [59]. In contrast to teaching directly from textbooks, or through mathematical formulae, these types of active, hands-on teaching activities can provide deeper and more profound understanding of concepts [60]. Once more, the mini-Secchi disks used in such experiments could also be designed and manufactured in the classroom, using equipment available in most design and technology school departments (e.g., 3D printer, band saw and metal lathe). In fact, a batch of mini-Secchi disks were produced in the classroom at Chatham and Clarendon Grammar School as part of the REVIVAL project (see Figure 3 and https://pml.ac.uk/Research/Projects/REVIVAL). Actively designing, manufacturing and then using a scientific instrument in a planned hypothesis-driven experiment would be a powerful means of teaching the scientific method, and give students a grounding in the broad spectrum of skills in demand in aquatic optics.
3.1.4. Temperature Measurements from the Mini-Secchi Disk
Comparison between the housed iButton and the NIST-traceable temperature probe (Figure 10b) on AMT28 indicate a median difference of 0.283 °C, within the manufacturers stated accuracy of the iButton (± 0.5 °C). This difference was relatively systematic over the temperature range tested (Figure 10b) and was therefore subtracted from all iButton data. Figure 10c indicates the corrected iButton data track tightly the continuous water temperature measurements from the underway CTD system on AMT28. Histogram of water temperature differences between the underway CTD and iButton (Figure 10d) show differences ≤0.05 °C, with little difference between predawn stations (median and mean absolute differences ∼0.03 °C) and noon stations (median absolute difference 0.03 °C and mean absolute difference of 0.06 °C). Histograms of water temperature differences between the profiler CTD and iButton (Figure 10e) also show median absolute differences of 0.05 °C (0.04 °C predawn, 0.08 °C noon), but higher mean differences (0.17 °C), owing to two outliers (not shown on the histogram at 1.19 and 1.72 °C), one occurring during a noon station the other during a predawn station).
The tests on AMT28 indicate it is possible to retrieve water temperature measurements with an accuracy of 0.05 °C using a calibrated iButton attached to the mini-Secchi disk. Without calibration, and according to manufacturers, this version of the iButton (the DS1922L Thermochron D/logger) has an accuracy of ±0.5 °C. For some coastal applications this is deemed reasonable, for other applications better accuracy is required. For example, space agencies target accuracy requirements for state-of-the-art satellite thermal sensors in coastal waters are <0.5 °C [62]. We envisage the accuracy of these miniature loggers will improve in the future. Meanwhile, for potential citizen science projects, the scientists could work with the citizens to do the calibrations or devise a simple method the citizens can use to do the calibrations themselves.
Water temperature is considered by the Global Climate Observing System as an Essential Climate Variable [63,64]. It controls aspects of the physical, biological and chemical state of aquatic water bodies [65] and has been linked to shifts in species and reconfigurations of aquatic communities [66,67,68,69]. Monitoring temperatures in lake and nearshore waters using the mini-Secchi disk could be useful for addressing a wide range of scientific questions, for instance on coupling between biological and physical processes [70,71], and for applications such as satellite validation [48,72] and environmental monitoring [73]. As environmental sensors become smaller, less expensive and more accurate, other important variables such as conductivity, pH and fluorescence could be measured by similar means using a mini-Secchi disk.
3.2. Future Directions for the Mini-Secchi Disk
Although it has already proven useful for various applications (Figure 7, Figure 8, Figure 9 and Figure 10), future improvements could be made to the mini-Secchi device. In its current form, approximately 7 to 8 m of tape can fit into the casing of the mini-Secchi device. Lottig et al. [24] found the average Secchi depth of 3251 lakes to be 2.4 m (median 2.1 m) with the vast majority of data <5 m (see Figure 3 of [24]). However, for some oligotrophic lakes, the Secchi depth can be as deep as 16 m [24]. Secchi depths can also regularly exceed 7 m in some nearshore regions, for example, around coral reefs [74].
Increasing the length of the tape could be achieved through a number of means, each with its caveats. The device could be made a little larger (including the disk), such that more tape could be fitted into the casing. Different sized devices could be developed for different conditions. The disadvantage of increasing the size is that the device may become less convenient to use. The tape could be made thinner, to enable more tape to fit into the casing. The disadvantage would be that the tape could lose some of its properties (e.g., resistance to wear and stretching), or become more expensive. One possible avenue to explore is to integrate mechanics within the device to log distance. One could then use a wire rather than a tape which would allow an increase in length (much smaller surface area) and also reduce drag on the tape when operating at higher current speeds. 3D printing mechanics within the casing is possible, but challenging. It would require precision printing and would likely reduce the durability of the device (more components vulnerable to failure). As 3D printers improve, further options to address this challenge may appear.
Although it is easy to use and provides a useful index of water colour, the vinyl-laminated FU colour scale sticker is not a perfect method for measuring water colour and future work should look to compare it with a standard FU scale. Variations in colour and durability (exposure to sunlight and water) of the sticker will depend on the quality of the vinyl printer used and its laminated finish. We recommend printing a number of these stickers and replacing them when sufficient wear dictates. The FU colour scale sticker is based simply on an RGB colour scale developed by Wernand et al. [19] for mapping the FU colour index using satellite data, and was designed to represents the FU colours “as close as possible” [19]. Improvements to this colour scale could be made in the future. In particular, the colour of water recorded by looking at a Secchi disk at half the Secchi depth can differ from that looking directly into the water (i.e., not using a disk) [75]. The colour scale could be improved to characterise this better, perhaps by taking photographs of the disk at half the Secchi depth, or through improved numerical radiative-transfer simulations that characterise better the effect of the background white disk on water colour. The mini-Secchi device could also benefit from the development of other do-it-yourself tools for measuring water colour based on the FU scale [76].
Though outside the scope of this work, in which the focus was on the production and demonstration of applications of the mini-Secchi device, data logging is a critical part of the measurement process. In addition to logging the Secchi depth and FU colour number, the location and the time are essential pieces of information. Other environmental data, for instance, sky conditions and wind speed, and are also useful. The use of mobile phone apps and online data entry forms have proven to aid in these types of data logging processes. Mobile apps for logging Secchi depth and FU colour number have been developed [25,28] as well as apps that glean information on water colour from mobile phone cameras [77,78,79]. These apps also make use of existing technology on the phone, such as GPS, and can instantaneously upload data onto servers for safe archiving. It is envisaged these types of mobile applications would be useful for logging mini-Secchi data.
Small, low cost electronics and embedded computing (e.g., https://www.arduino.cc/ and https://www.raspberrypi.org/) are opening new doors in environmental monitoring [80,81,82]. Low cost electronic tools are now being developed for citizen science projects with integrated sensors (e.g., GPS and environmental sensors) and bluetooth (or mobile upload) capabilities that minimise the effort required by the citizen to take the measurement, process and transfer the data (e.g., [49]). Future versions of the mini-Secchi device could benefit from these advances.
Future work should aim to characterise uncertainty in the measurement collected using the mini-Secchi disk. This is especially important for applications like satellite validation. This requires quantifying the measurement equation, deriving uncertainties in all components of the measurement equation, then propagating these uncertainties through the measurement equation, accounting for any correlations [83]. With regard to the mini-Secchi disk, some components influencing the measurement equation include: The reflectivity of the disk, the state of the water surface, the deployment platform (e.g., fixed or moving boat), the current speed (influencing the verticality of deployment), and the individuals perception of colour and contrast. Future work will need to focus on quantifying the uncertainties in all components for an appropriate characterisation of measurement uncertainty.
4. Summary
We present a simple hand-held, pocket-sized device, designed to measure water clarity (Secchi depth) and colour (FU scale) in lakes, estuaries and nearshore regions. This standardised device is constructed with marine resistant materials and manufactured using a 3D printer and some other basic workshop tools. It is light in weight, easy to use, and inexpensive to manufacture. We explain how the device was developed and provide detailed instructions on how to build it. These instructions are supported by electronic files. We illustrate how to maintain and use the device, and show how other sensors can be attached for measuring variables such as water temperature. A series of applications is presented, showing how the device can be used for measuring spatial variations in lake colour and clarity, how the size of the device makes it accessible to a range of water users previously not capable of measuring water colour and clarity, how it can be used to teach the concepts of aquatic optics, and how accurate temperature data can be collected by attaching a cheap, well-calibrated, temperature sensor to the weight of the device. We envisage future iterations of the device will benefit from improvements in 3D printing, improvements in the water colour scale used, mobile applications and small, low cost electronics.
Supplementary Materials
The following are available online at https://www.mdpi.com/1424-8220/19/4/936/s1, Supplementary data 1:Technical drawings of both weights, Supplementary data 2: STL files of both weights, Supplementary data 3: STL file of casing, bobbin and handle; Supplementary data 4: Example vinyl print file of the Forel Ule scale, Supplementary data 5: Technical drawing of the finger strap.
Author Contributions
R.J.W.B. developed the concept and produced some initial prototypes. R.J.W.B. (scientist) and T.G.B. (designer) produced the design brief. T.G.B. designed the 3D printed device. T.G.B. was responsible for the manufacturing of the 3D printed device. R.J.W.B. wrote a first draft of the paper with input from T.G.B. and produced the final figures. All authors contributed to subsequent versions of the manuscript. J.P. produced the exploded drawing and rendering of the mini-Secchi disk used in Figure 2, and J.P. and S.R. gave input on the manufacturing of the device and helped produce some of the supplementary files. R.J.W.B. collected data in Playa Langosta and on AMT28. A.A. collected data in Vembanad lake. W.W. was responsible for the calibrations of the iButton and supported the SOD deployments on AMT28. J.P. and W.W. provided some of the photos used in the paper. S.S. and T.P. gave critical input to early drafts of the paper and provided support through their leadership in the REVIVAL project.
Funding
This research was funded by the Rehabilitation of Vibrio-infested waters of Lake Vembanad (REVIVAL) project, as part of the India-UK Water Quality Initiative of the Natural Environment Research Council (NERC) and the Engineering and Physical Sciences Research Council (EPSRC) in partnership with India’s Department of Science and Technology (DST). Grant number NE/R003521/1 and NERCDMP-686. This work is supported by the UK National Centre for Earth Observation.
Acknowledgments
The authors would like to acknowledge all scientists at the MOSIG meeting and pupils at Chatham and Clarendon Grammar School that took part in the two classroom experiments. We thank pupils at Chatham and Clarendon Grammar School that helped manufacture mini-Secchi devices for the REVIVAL project. We thank the officers, scientists and crew of RRS James Clark Ross who helped in the acquisition of AMT28 data and all those involved with data collection during the field trip in Vembanad lake. We thank Jo Brewin for the photos taken at Playa Langosta in Costa Rica and for letting her husband collect data and go surfing on their honeymoon. We acknowledge Giorgio Dall’Olmo, Tom Jackson and Stefan Simis for useful discussions during the production of this work, and the Indian REVIVAL team for their support. The authors would like to thank the Ocean Biology Processing Group of NASA for the processing the MODIS-Aqua SST data and Magicseaweed for providing wave data used in the paper. This is contribution number 332 of the AMT programme.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Secchi, P.A. Relazione delle esperienze fatte a bordo della pontificia pirocorvetta Imacolata Concezione per determinare la trasparenza del mare. In Il Nuovo Cimento Giornale de Fisica, Chimica e Storia Naturale; Springer: Berlin, Germany, 1985; Volume 20, pp. 205–237. [Google Scholar]
- Forel, F.A. Une nouvelle forme de la gamme de couleur pour l’étude de l’eau des lacs. Archives des Sciences Physiques et Naturelles/Société de Physique et d’Histoire Naturelle de Genève 1890, 6, 25. (In French) [Google Scholar]
- Ule, W. Die bestimmung der Wasserfarbe in den Seen. In Kleinere Mittheilungen. Dr. A. Petermanns Mittheilungen aus Justus Perthes geographischer Anstalt; Justus Perthes: Gotha, Germany, 1892; pp. 70–71. [Google Scholar]
- Wernand, M.R. On the history of the Secchi disc. J. Eur. Opt. Soc. Rapid Publ. 2010, 5, 10013s. [Google Scholar] [CrossRef]
- Wernand, M.R.; van der Woerd, H.J. Spectral analysis of the Forel-Ule ocean colour comparator scale. J. Eur. Opt. Soc. Rapid Publ. 2010, 5, 10014s. [Google Scholar] [CrossRef]
- Wernand, M.R.; Gieskes, W.W.C. Ocean Optics from 1600 (Hudson) to 1930 (Raman): Shifting Interpretation of Natural Water Colouring; Union des Océanographes de France: Paris, France, 2012; p. 88. [Google Scholar]
- Sandén, P.; Håkansson, B. Long-term trends in Secchi depth in the Baltic Sea. Limnol. Oceanogr. 1996, 41, 346–351. [Google Scholar] [CrossRef]
- Aksnes, D.L.; Ohman, M.D. Multi-decadal shoaling of the euphotic zone in the southern sector of the California Current System. Limnol. Oceanogr. 2009, 54, 1272–1281. [Google Scholar] [CrossRef]
- Boyce, D.G.; Lewis, M.R.; Worm, B. Global phytoplankton decline over the past century. Nature 2010, 466, 591–596. [Google Scholar] [CrossRef] [PubMed]
- Boyce, D.G.; Lewis, M.; Worm, B. Integrating global chlorophyll data from 1890 to 2010. Limnol. Oceanogr. Methods 2012, 10, 840–852. [Google Scholar] [CrossRef]
- Philippart, C.J.M.; Salama, M.S.; Kromkamp, J.C.; van der Woerd, H.J.; Zuur, A.F.; Cadée, G.C. Four decades of variability in turbidity in the western Wadden Sea as derived from corrected Secchi disk readings. J. Sea Res. 2013, 82, 67–79. [Google Scholar] [CrossRef]
- Wernand, M.R.; van der Woerd, H.J. Ocean colour changes in the North Pacific since 1930. J. Eur. Opt. Soc. Rapid Publ. 2010, 5, 10015s. [Google Scholar] [CrossRef]
- Wernand, M.R.; van der Woerd, H.J.; Gieskes, W.W.C. Trends in Ocean Colour and Chlorophyll Concentration from 1889 to 2000, Worldwide. PLoS ONE 2013, 8, e63766. [Google Scholar]
- Harrington, J.A.; Schiebe, F.R.; Nix, J.F. Remote Sensing of Lake Chicot, Arkansas: Monitoring Suspended Sediments, Turbidity, and Secchi Depth with Landsat MSS Data. Remote Sens. Environ. 1992, 39, 15–27. [Google Scholar] [CrossRef]
- Nelson, S.A.C.; Soranno, P.A.; Cheruvelil, K.S.; Batzli, S.A.; Skole, D.L. Regional assessment of lake water clarity using satellite remote sensing. J. Limnol. 2003, 62, 27–32. [Google Scholar] [CrossRef]
- Kratzer, S.; Håkansson, B.; Sahlin, C. Assessing Secchi and Photic Zone Depth in the Baltic Sea from Satellite Data. AMBIO J. Hum. Environ. 2003, 32, 577–585. [Google Scholar] [CrossRef]
- Kratzer, S.; Brockmann, C.; Moore, G. Using MERIS full resolution data to monitor coastal waters—A case study from Himmerfjärden, a fjord-like bay in the northwestern Baltic Sea. Remote Sens. Environ. 2008, 112, 2284–2300. [Google Scholar] [CrossRef]
- Morel, A.; Huot, Y.; Gentili, B.; Werdell, P.J.; Hooker, S.B.; Franz, B.A. Examining the consistency of products derived from various ocean color sensors in open ocean (case 1) waters in the perspective of a multi-sensor approach. Remote Sens. Environ. 2007, 111, 69–88. [Google Scholar] [CrossRef]
- Wernand, M.R.; Hommersom, A.; van der Woerd, H.J. MERIS-based ocean colour classification with the discrete Forel-Ule scale. Ocean Sci. 2013, 9, 477–487. [Google Scholar] [CrossRef]
- Lee, Z.; Shang, S.; Hu, C.; Du, K.; Weidemann, A.; Hou, W.; Lin, J.; Lin, G. Secchi disk depth: A new theory and mechanistic model for underwater visibility. Remote Sens. Environ. 2015, 169, 139–149. [Google Scholar] [CrossRef]
- van der Woerd, H.J.; Wernand, M.R. Hue-Angle Product for Low to Medium Spatial Resolution Optical Satellite Sensors. Remote Sens. 2018, 10, 180. [Google Scholar] [CrossRef]
- Wang, S.; Li, J.; Zhang, B.; Spyrakos, E.; Tyler, A.N.; Shen, Q.; Zhang, F.; Kuster, T.; Lehmann, M.K.; Wu, Y.; et al. Trophic state assessment of global inland waters using a MODIS-derived Forel-Ule index. Remote Sens. Environ. 2018, 217, 444–460. [Google Scholar] [CrossRef]
- Preisendorfer, R.W. Secchi disk science: Visual optics of natural waters. Limnol. Oceanogr. 1986, 31, 909–926. [Google Scholar] [CrossRef]
- Lottig, N.R.; Wagner, T.; Norton Henry, E.; Spence Cheruvelil, K.; Webster, K.E.; Downing, J.A.; Stow, C.A. Long-Term Citizen-Collected Data Reveal Geographical Patterns and Temporal Trends in Lake Water Clarity. PLoS ONE 2014, 9. [Google Scholar] [CrossRef]
- Garaba, S.P.; Friedrichs, A.; ans Voß, D.; Zielinski, O. Classifying Natural Waters with the Forel-Ule Colour Index System: Results, Applications, Correlations and Crowdsourcing. Int. J. Environ. Res. Public Health 2015, 12, 16096–16109. [Google Scholar] [CrossRef]
- Busch, J.A.; Bardaji, R.; Ceccaroni, L.; Friedrichs, A.; Piera, J.; Simon, C.; Thijsse, P.; Wernand, M.; van der Woerd, H.J.; Zielinski, O.; et al. Citizen bio-optical observations from coast-and ocean and their compatibility with ocean colour satellite measurements. Remote Sens. 2016, 8, 879. [Google Scholar] [CrossRef]
- Busch, J.A.; Price, I.; Jeansou, E.; Zielinski, O.; van der Woerd, H.J. Citizens and satellites: Assessment of phytoplankton dynamics in a NW Mediterranean aquaculture zone. Int. J. Appl. Earth Observ. Geoinf. 2016, 47, 40–49. [Google Scholar] [CrossRef]
- Seafarers, S.D.; Lavender, S.; Beaugrand, G.; Outram, N.; Barlow, N.; Crotty, D.; Evans, J.; Kirby, R. Seafarer citizen scientist ocean transparency data as a resource for phytoplankton and climate research. PLoS ONE 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- Jones, N. Science in three dimensions. The print revolution: Three-dimensional printers are opening up new worlds to research. Nature 2012, 487, 22–23. [Google Scholar] [CrossRef] [PubMed]
- Shimizu, T.S.; Le Novére, N.; Levin, M.D.; Beavil, A.J.; Sutton, B.J.; Bray, D. Molecular model of a lattice of signalling proteins involved in bacterial chemotaxis. Nat. Cell Biol. 2000, 2, 792–796. [Google Scholar] [CrossRef] [PubMed]
- Gillet, A.; Sanner, M.; Stoffler, D.; Olson, A. Tangible Interfaces for Structural Molecular Biology. Structure 2005, 13, 483–491. [Google Scholar] [CrossRef] [PubMed]
- Ponce de León, M.S.; Golovanova, L.; Doronichev, V.; Romanova, G.; Akazawa, T.; Kondo, O.; Ishida, Y.H.; Zollikofer, C.P.E. Neanderthal brain size at birth provides insights into the evolution of human life history. Proc. Natl. Acad. Sci. USA 2008, 105, 13764–13768. [Google Scholar] [CrossRef]
- Niven, L.; Steele, T.E.; Finke, H.; Gernat, T.; Hublin, J.J. Virtual skeletons: using a structured light scanner to create a 3D faunal comparative collection. J. Archaeol. Sci. 2009, 36, 2018–2023. [Google Scholar] [CrossRef]
- Hutmacher, D.; Sittinger, M.; Risbud, M. Scaffold-based tissue engineering: Rationale for computer aided design and solid free-form fabrication systems. Trends Biotechnol. 2004, 22, 354–362. [Google Scholar] [CrossRef]
- Saunders, R.E.; Gough, J.E.; Derby, B. Delivery of human fibroblast cells by piezoelectric drop-on-demand inkjet printing. Biomaterials 2008, 29, 193–203. [Google Scholar] [CrossRef] [PubMed]
- Symes, M.D.; Kitson, P.J.; Yan, J.; Richmond, C.J.; Cooper, G.J.T.; Bowman, R.W.; Vilbrandt, T.; Cronin, L. Integrated 3D-printed reactionware for chemical synthesis and analysis. Nat. Chem. 2012, 4, 349–354. [Google Scholar] [CrossRef] [PubMed]
- Chen, A. 3-D Printers Spread From Engineering Departments to Designs Across Disciplines. Chron. High. Educ. 2012, 59, A24–A25. [Google Scholar]
- Rangel, D.P.; Superak, C.; Bielschowsky, M.; Farris, K.; Falconer, R.E.; Baveye, P.C. Rapid Prototyping and 3-D Printing of Experimental Equipment in Soil Science Research. Soil Sci. Soc. Am. J. 2013, 77, 54–59. [Google Scholar] [CrossRef]
- Waldbaur, A.; Rapp, H.; Lang, K.; Rapp, B.E. Let there be chip-towards rapid prototyping of microfluidic devices: One-step manufacturing processes. Anal. Methods 2011, 3, 2681–2716. [Google Scholar] [CrossRef]
- Mohammed, J.S. Applications of 3D printing technologies in oceanography. Methods Oceanogr. 2016, 17, 97–117. [Google Scholar] [CrossRef]
- Hou, W.; Lee, Z.; Weidemann, A.D. Why does the Secchi disk disappear? An imaging perspective. Opt. Express 2007, 15, 2791–2802. [Google Scholar] [CrossRef]
- Donlon, C.J.; Wimmer, W.; Robinson, I.; Fisher, G.; Ferlet, M.; Nightingale, T.; Bras, B. A second-generation blackbody system for the calibration and verification of seagoing infrared radiometers. J. Atmos. Ocean. Technol. 2014, 31, 1104–1127. [Google Scholar] [CrossRef]
- Kumar, R.; Raman, N.N.; Pranav, P.; Pamanna, D.; Amin, A.; Sumanjali, S.S. The physico-chemical characteristics of vembanad backwaters at Eramalloor region, Alappuzha district, Kerala, India. Int. J. Fish. Aquat. Stud. 2017, 5, 258–262. [Google Scholar]
- Buckley, R. Surf tourism and sustainable development in Indo-Pacific Islands. I. The industry and the islands. J. Sustain. Tour. 2002, 10, 405–424. [Google Scholar] [CrossRef]
- Cisneros-Montemayor, A.M.; Sumaila, U.R. A global estimate of benefits from ecosystem-based marine recreation: Potential impacts and implications for management. J. Bioecon. 2010, 12, 245–268. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; Hyder, K.; Andersson, A.J.; Billson, O.; Bresnahan, P.J.; Brewin, T.G.; Cyronak, T.; Dall’Olmo, G.; de Mora, L.; Graham, G.; et al. Expanding aquatic observations through recreation. Front. Mar. Sci. 2017, 4, 351. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; de Mora, L.; Jackson, T.; Brewin, T.G.; Shutler, J. On the Potential of Surfers to Monitor Environmental Indicators in the Coastal Zone. PLoS ONE 2015, 10, e0127706. [Google Scholar] [CrossRef] [PubMed]
- Brewin, R.J.W.; de Mora, L.; Billson, O.; Jackson, T.; Russell, P.; Brewin, T.G.; Shutler, J.; Miller, P.I.; Taylor, B.H.; Smyth, T.; Fishwick, J.R. Evaluating operational AVHRR sea surface temperature data at the coastline using surfers. Estuar. Coast. Shelf Sci. 2017, 196, 276–289. [Google Scholar] [CrossRef]
- Bresnahan, P.J.; Cyronak, T.; Martz, T.; Andersson, A.; Waters, S.; Stern, A.; Richard, J.; Hammond, K.; Griffin, J.; Thompson, B. Engineering a Smartfin for surf-zone oceanography. In Proceedings of the OCEANS 2017—Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–4. [Google Scholar]
- Boss, E.; Zaneveld, J.R.V. The effect of bottom substrate on inherent optical properties: Evidence of biogeochemical processes. Limnol. Oceanogr. 2003, 48, 346–354. [Google Scholar] [CrossRef]
- Wright, S.; Hull, T.; Sivyer, D.B.; Pearce, D.; Pinnegar, J.K.; Sayer, M.D.J.; Mogg, A.O.M.; Azzopardi, E.; Gontarek, S.; Hyder, K. SCUBA divers as oceanographic samplers: The potential of dive computers to augment aquatic temperature monitoring. Sci. Rep. 2016, 6, 1–8. [Google Scholar] [CrossRef]
- Egi, S.; Cousteau, P.Y.; Pieri, M.; Cerrano, C.; Özyigit, T.; Marroni, A. Designing a Diving Protocol for Thermocline Identification Using Dive Computers in Marine Citizen Science. Appl. Sci. 2018, 8, 2315. [Google Scholar] [CrossRef]
- Bresnahan, P.J.; Wirth, T.; Martz, T.R.; Andersson, A.J.; Cyronak, T.; D’Angelo, S.; Pennise, J.; Melville, W.K.; Lenain, L.; Statom, N. A sensor package for mapping pH and oxygen from mobile platforms. Methods Oceanogr. 2016, 17, 1–13. [Google Scholar] [CrossRef]
- Lauro, F.M.; Senstius, S.J.; Cullen, J.; Neches, R.; Jensen, R.M.; Brown, M.V.; Darling, A.E.; Givskov, M.; McDougald, D.; Hoeke, R.; et al. The Common Oceanographer: Crowdsourcing the Collection of Oceanographic Data. PLoS Biol. 2014, 12, e1001947. [Google Scholar] [CrossRef]
- Davies, B.R.; Biggs, J.; Williams, P.J.; Lee, J.T.; Thompson, S. A comparison of the catchment sizes of rivers, streams, ponds, ditches and lakes: Implications for protecting aquatic biodiversity in an agricultural landscape. Hydrobiologia 2008, 597, 7–17. [Google Scholar] [CrossRef]
- Tittensor, D.P.; Mora, C.; Jetz, W.; Lotze, H.K.; Ricard, D.; Berghe, E.V.; Worm, B. Global patterns and predictors of marine biodiversity across taxa. Nature 2010, 466, 1098–1103. [Google Scholar] [CrossRef] [PubMed]
- Dudgeon, D.; Arthington, A.H.; Gessner, M.O.; Kawabata, Z.I.; Knowler, D.J.; Lévêque, C.; Naiman, R.J.; Prieur-Richard, A.H.; Soto, D.; Stiassny, M.L.; et al. Freshwater biodiversity: Importance, threats, status and conservation challenges. Biol. Rev. 2006, 81, 163–182. [Google Scholar] [CrossRef] [PubMed]
- Postel, S.; Carpenter, S. Nature’s Services: Societal Dependence on Natural Ecosystems; Chapter Freshwater Ecosystem Services; Island Press: Washington, DC, USA, 1997; p. 195. [Google Scholar]
- Lee, Z.; Shang, S.; Lin, G.; Liu, T.; Liu, Y.; Du, K.; Luis, K. Secchi disk observation with spectral-selective glasses in blue and green waters. Opt. Express 2017, 25, 19878–19885. [Google Scholar] [CrossRef] [PubMed]
- Karp-Boss, L.; Boss, E.; Weller, H.; Loftin, J.; Albright, J. Teaching Physical Concepts on Oceanography: An Inquiry-Based Approach. Oceanography 2009, 22. [Google Scholar] [CrossRef]
- NASA. MODIS-Aqua Ocean Color Data; NASA Goddard Space Flight Center, Ocean Ecology Laboratory, Ocean Biology Processing Group. 2014. Available online: http://dx.doi.org/10.5067/AQUA/MODIS_OC.2014.0 (accessed on 28 July 2015).
- Donlon, C. Sentinel-3 Mission Requirements Traceability Document (MRTD). Technical Report. 2011. Available online: http://download.esa.int/docs/EarthObservation/GMES_Sentinel-3_MRTD_Iss-1_Rev-0-issued-signed.pdf (accessed on 5 September 2017).
- GCOS. Systematic Observation Requirements from Satellite-Based Data Products for Climate; Technical Report; 7 bis, avenue de la Paix, CH-1211; World Meteorological Organisation (WMO): Geneva, Switzerland, 2011. [Google Scholar]
- Bojinski, S.; Verstraete, M.; Peterson, T.; Richter, C.; Simmons, A.; Zemp, M. The concept of essential climate variables in support of climate research, applications, and policy. Bull. Am. Meteorol. Soc. 2014, 95, 1431–1443. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; Smale, D.A.; Moore, P.J.; Dall’Olmo, G.; Miller, P.I.; Taylor, B.; Smyth, T.J.; Fishwick, J.R.; Yang, M. Evaluating Operational AVHRR Sea Surface Temperature Data at the Coastline Using Benthic Temperature Loggers. Remote Sens. 2018, 10, 925. [Google Scholar] [CrossRef]
- Garrabou, J.; Coma, R.; Bensoussan, N.; Bally, M.; Chevaldonne, P.; Cigliano, M.; Diaz, D.; Harmelin, J.G.; Gambi, M.C.; Kersting, D.K.; et al. Mass mortality in Northwestern Mediterranean rocky benthic communities: Effects of the 2003 heat wave. Glob. Chang. Biol. 2009, 15, 1090–1103. [Google Scholar] [CrossRef]
- Poloczanska, E.S.; Brown, C.J.; Sydeman, W.J.; Kiessling, W.; Schoeman, D.S.; Moore, P.J.; Brander, K.; Bruno, J.F.; Buckley, L.B.; Burrows, M.T.; et al. Global imprint of climate change on marine life. Nat. Clim. Chang. 2013, 3, 919–925. [Google Scholar] [CrossRef]
- Vergés, A.; Steinberg, P.D.; Hay, M.E.; Poore, A.G.B.; Campbell, A.H.; Ballesteros, E.; Heck, K.L.; Booth, D.J.; Coleman, M.A.; Feary, D.A.; et al. The tropicalization of temperate marine ecosystems: Climate-mediated changes in herbivory and community phase shifts. Proc. R. Soc. B Biol. Sci. 2014, 281. [Google Scholar] [CrossRef]
- Wernberg, T.; Bennett, S.; Babcock, R.C.; de Bettignies, T.; Cure, K.; Depczynski, M.; Dufois, F.; Fromont, J.; Fulton, C.J.; Hovey, R.K.; et al. Climate-driven regime shift of a temperate marine ecosystem. Science 2016, 353, 169–172. [Google Scholar] [CrossRef]
- Powell, T. Ecological Time Series; Chapter Physical and Biological Scales of Variability in Lakes, Estuaries, and the Coastal Ocean; Springer: Boston, MA, USA, 1995; pp. 119–138. [Google Scholar]
- Sathyendranath, S.; Platt, T. Spectral effects in bio-optical control on the ocean system. Oceanologia 2007, 49, 5–39. [Google Scholar]
- Brabyn, L.; Zawar-Reza, P.; Stichbury, G.; Cary, C.; Storey, B.; Laughlin, D.C.; Katurji, M. Accuracy assessment of land surface temperature retrievals from Landsat 7 ETM+ in the Dry Valleys of Antarctica using iButton temperature loggers and weather station data. Environ. Monitor. Assess. 2014, 186, 2619–2628. [Google Scholar] [CrossRef] [PubMed]
- Borja, A. The European water framework directive: A challenge for nearshore, coastal and continental shelf research. Cont. Shelf Res. 2005, 25, 1768–1783. [Google Scholar] [CrossRef]
- Fabricius, K.E.; Cooper, T.F.; Humphrey, C.; Uthicke, S.; De’ath, G.; Davidson, J.; LeGrand, H.; Thompson, A.; Schaffelke, B. A bioindicator system for water quality on inshore coral reefs of the Great Barrier Reef. Mar. Pollut. Bull. 2012, 65, 320–332. [Google Scholar] [CrossRef] [PubMed]
- Pitarch, J. Biases in ocean color over a Secchi disk. Opt. Express 2017, 25, A1124–A1131. [Google Scholar] [CrossRef] [PubMed]
- Novoa, S.; Wernand, M.R.; van der Woerd, H.J. The modern Forel-Ule scale: A ‘do-it-yourself’ colour comparator for water monitoring. J. Eur. Opt. Soc. Rapid Publ. 2014, 9, 1–10. [Google Scholar] [CrossRef]
- Sung, Y.; Campa, F.; Shih, W.C. Open-source do-it-yourself multi-color fluorescence smartphone microscopy. Opt. Express 2017, 8, 5075–5086. [Google Scholar] [CrossRef]
- Friedrichs, A.; Busch, J.A.; van der Woerd, H.J.; Zielinski, O. SmartFluo: A Method and Affordable Adapter to Measure Chlorophyll a Fluorescence with Smartphones. Sensors 2017, 17, 678. [Google Scholar] [CrossRef]
- Leeuw, T.; Boss, E. The HydroColor App: Above Water Measurements of Remote Sensing Reflectance and Turbidity Using a Smartphone Camera. Sensors 2018, 18, 256. [Google Scholar] [CrossRef]
- Leeuw, T.; Boss, E.S.; Wright, D.L. In situ measurements of phytoplankton fluorescence using low cost electronics. Sensors 2013, 13, 7872–7883. [Google Scholar] [CrossRef]
- Williams, K.; De Robertis, A.; Berkowitz, Z.; Rooper, C.; Towler, R. An underwater stereo-camera trap. Methods Oceanogr. 2014, 11, 1–12. [Google Scholar] [CrossRef]
- Bardaji, R.; Sánchez, A.M.; Simon, C.; Wernand, M.R.; Piera, J. Estimating the underwater diffuse attenuation coefficient with a low-cost instrument: The KdUINO DIY buoy. Sensors 2016, 16, 373. [Google Scholar] [CrossRef] [PubMed]
- JCGM. Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement; JCGM 100:2008 (GUM 1995 with Minor Corrections); Technical Report; BIPM, IEC, IFCC, ILAC, ISO, IUPAC, IUPAP and OIML; JCGM, 2008. Available online: https://ncc.nesdis.noaa.gov/documents/documentation/JCGM_100_2008_E.pdf (accessed on 7 February 2019).










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).