Development of Radio-Frequency Sensor Wake-Up with Unmanned Aerial Vehicles as an Aerial Gateway


Abstract
:1. Introduction
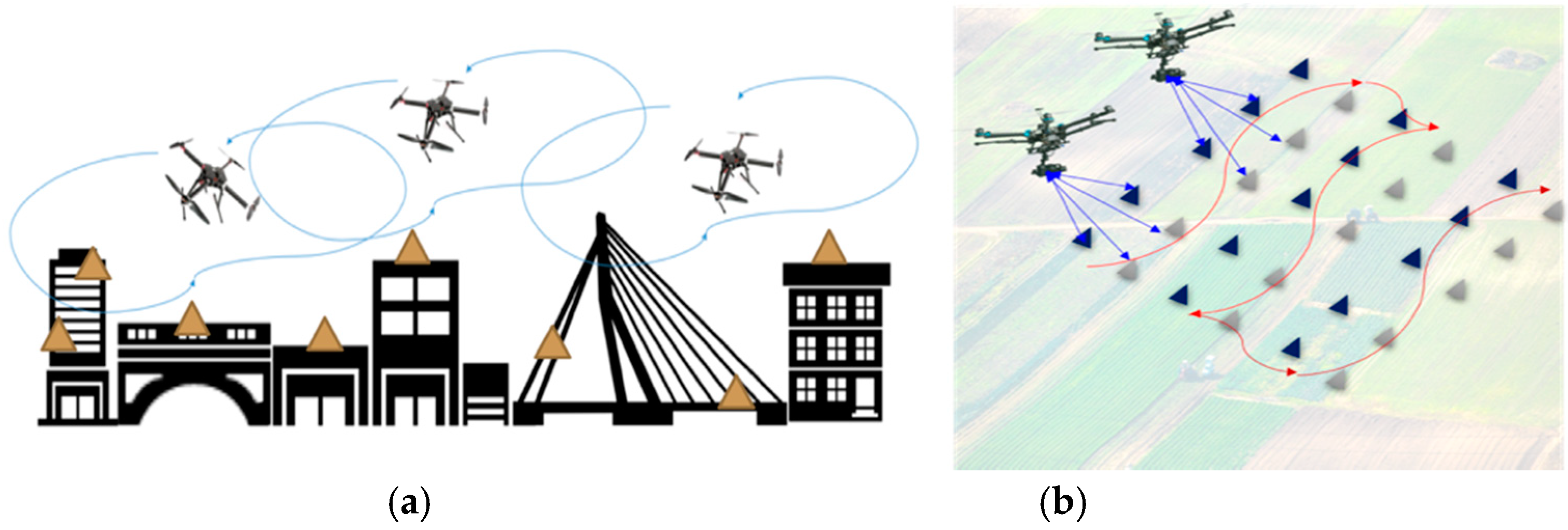
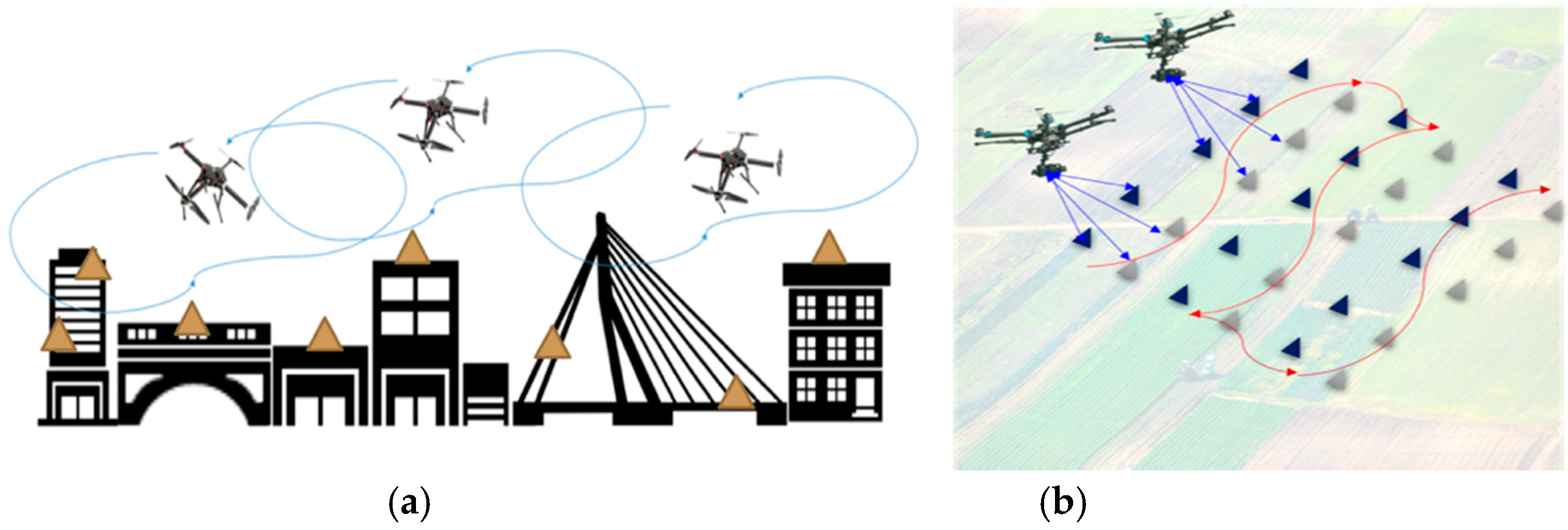
2. Unmanned Aerial Vehicle Wireless Sensing Network (UAV-WSN) Integration, Opportunistic Sensing, and Research Needs
3. Sensor Activation and Related Work
4. Proposed Energy Efficient Sensing Network
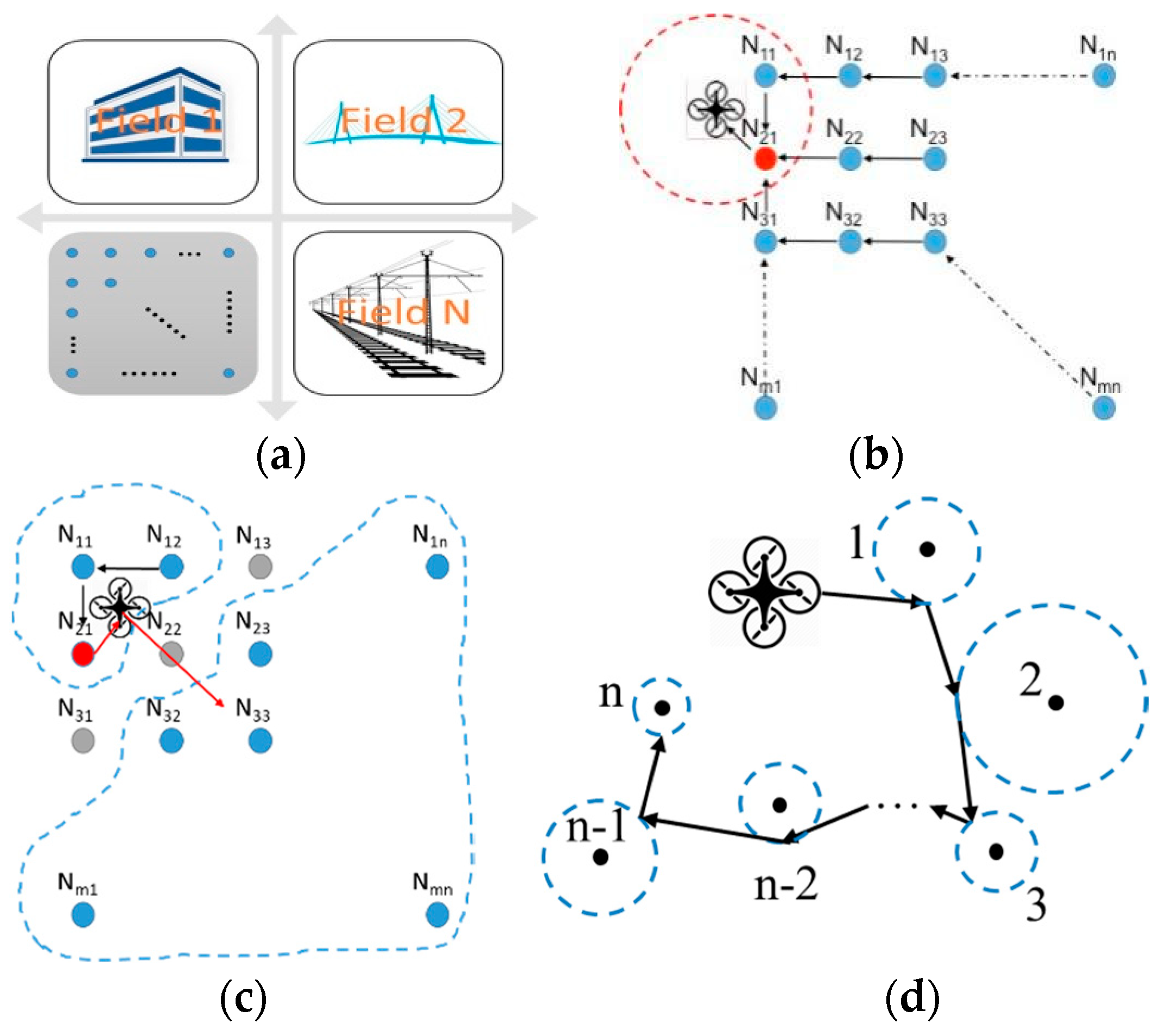
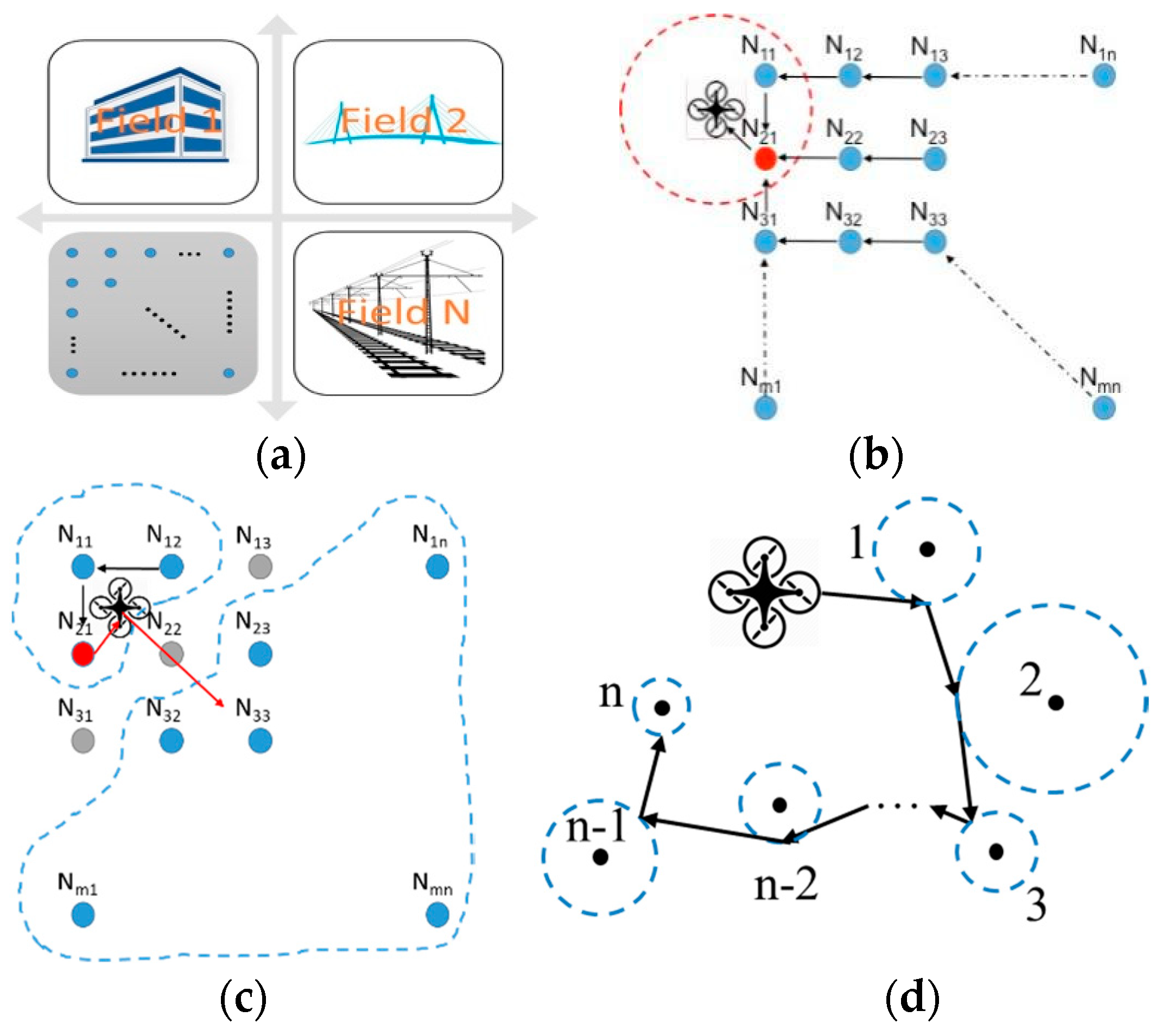
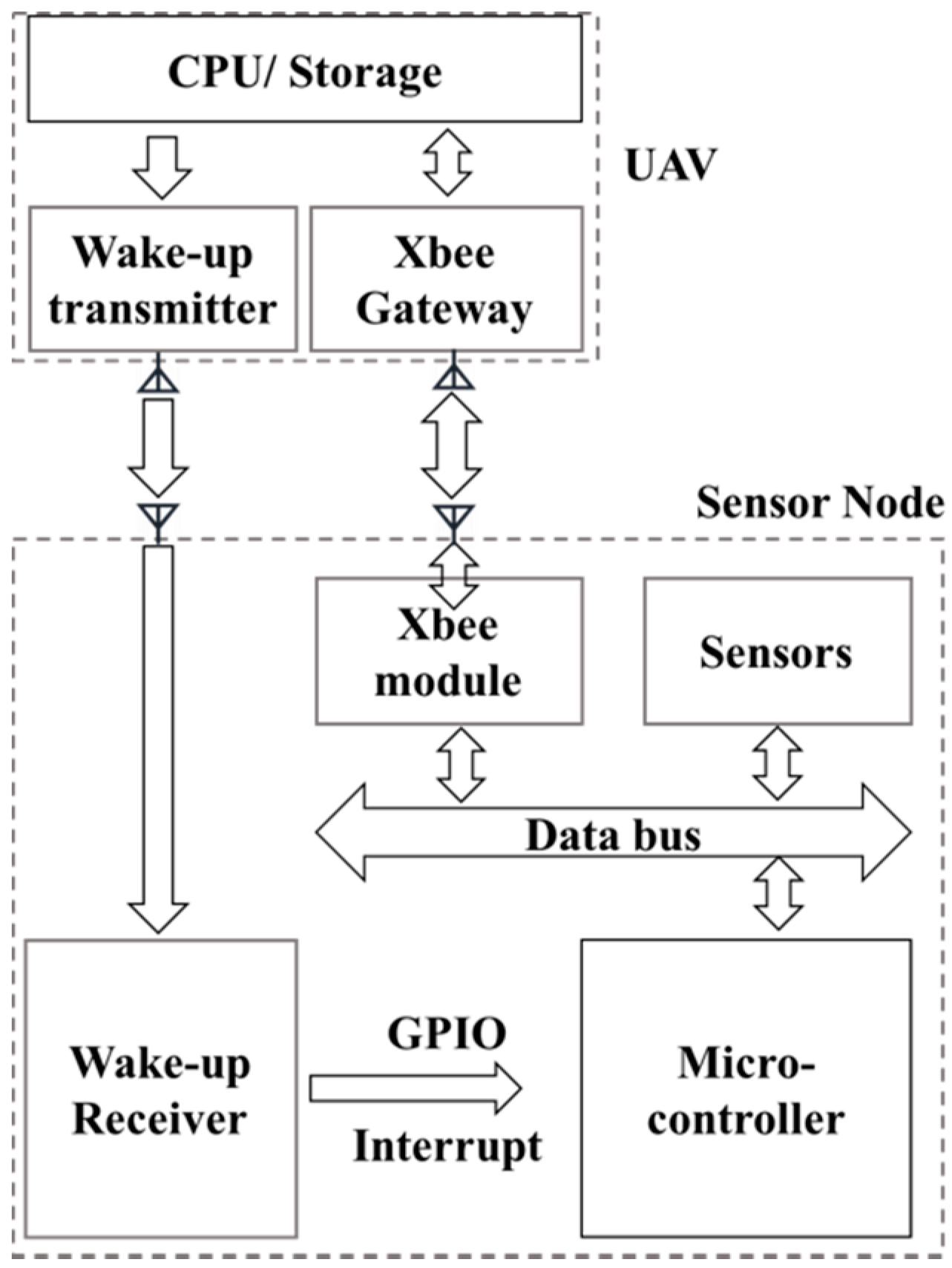
4.1. Topology and Implementation
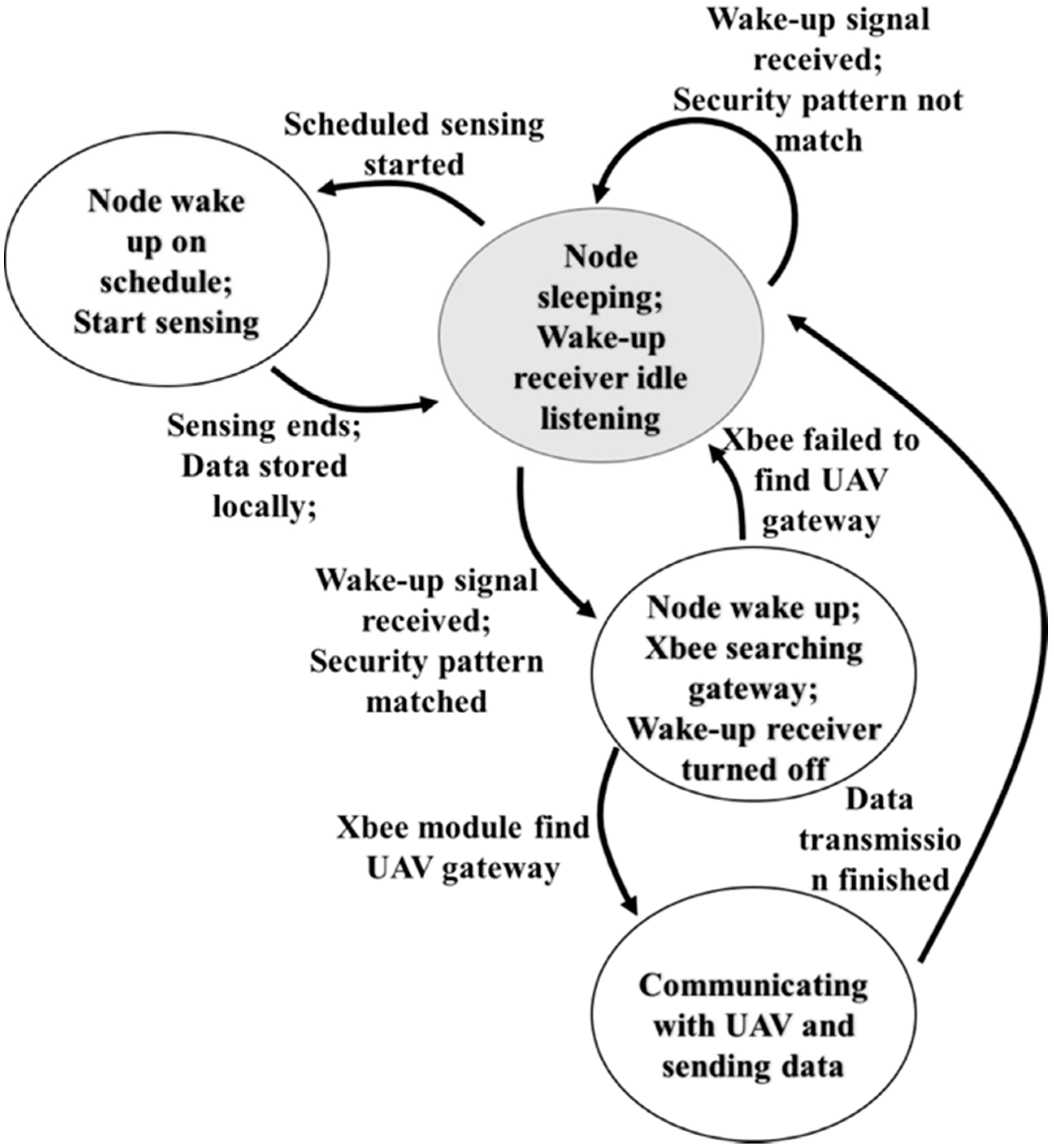
4.2. General Active Out-Band Wake-Up Mechanism
- (1)
- When the sensor node is deployed in the field it is pre-programmed with a duty-cycle sensing schedule. It starts off in sleep mode, which we call the initial state. Only the wake-up receiver is listening in our example, which is either an infrared or RF wake-up receiver.
- (2)
- If a wake-up signal is received by the sensor node, it will check whether the signal matches the pre-stored pattern. If not, the node ignores the signal and changes back to the initial state.
- (3)
- If the wake-up signal matches the stored pattern the node will wake up, start the XBee module, and turn off the wake-up receiver. Then, the XBee begins scanning the gateway on the UAV.
- (4)
- If the XBee module fails to find the gateway in a couple of tries, the node shuts down the XBee module and returns to the initial state.
- (5)
- If the XBee module successfully connects to the gateway, it starts communication with the UAV as programmed (e.g., sensing data or updated schedules).
- (6)
- After the communication ends, the node returns to the initial state again.
5. Radio Frequency (RF) and Infrared Wake-Up Mechanisms and Implementation
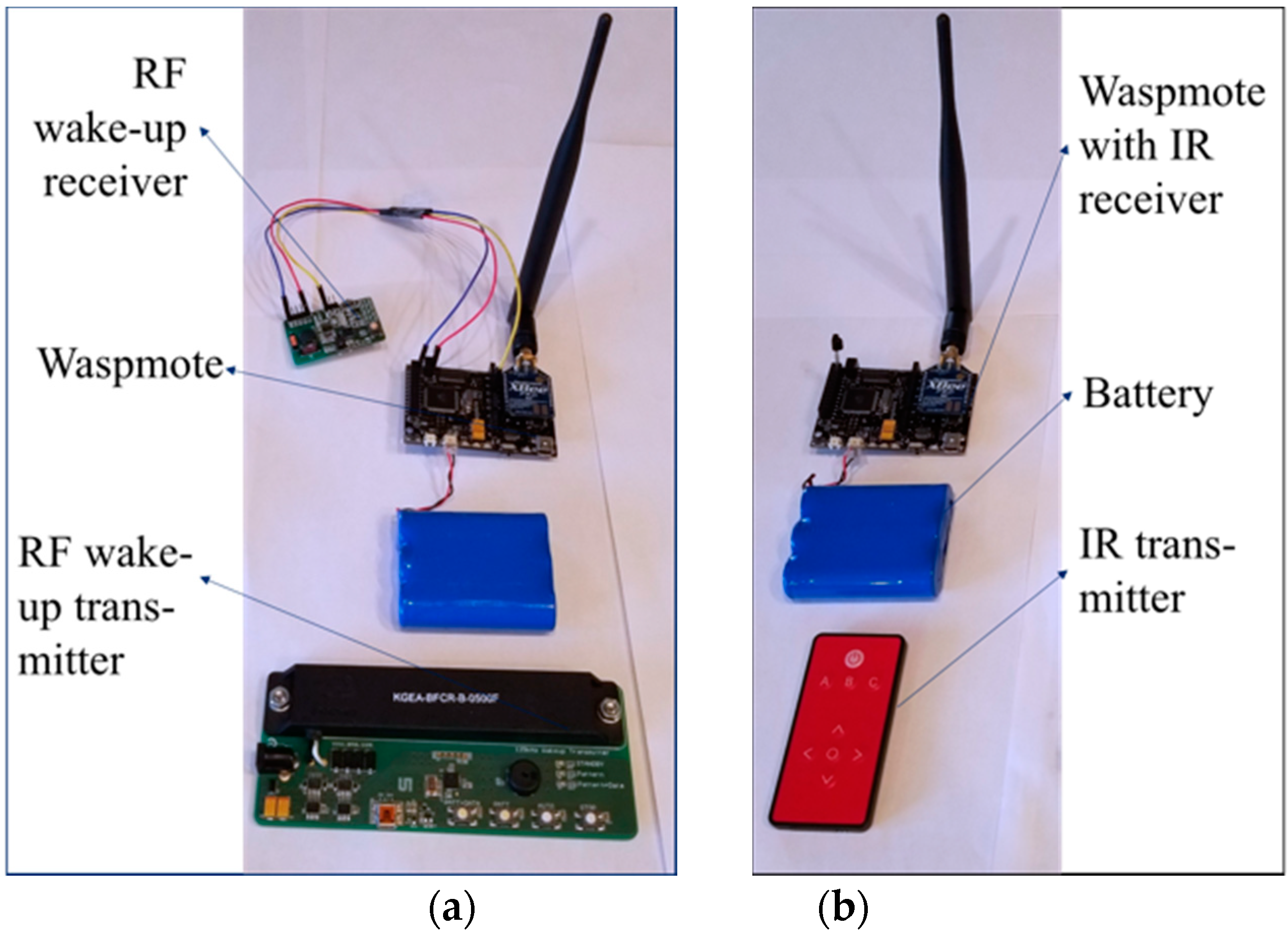
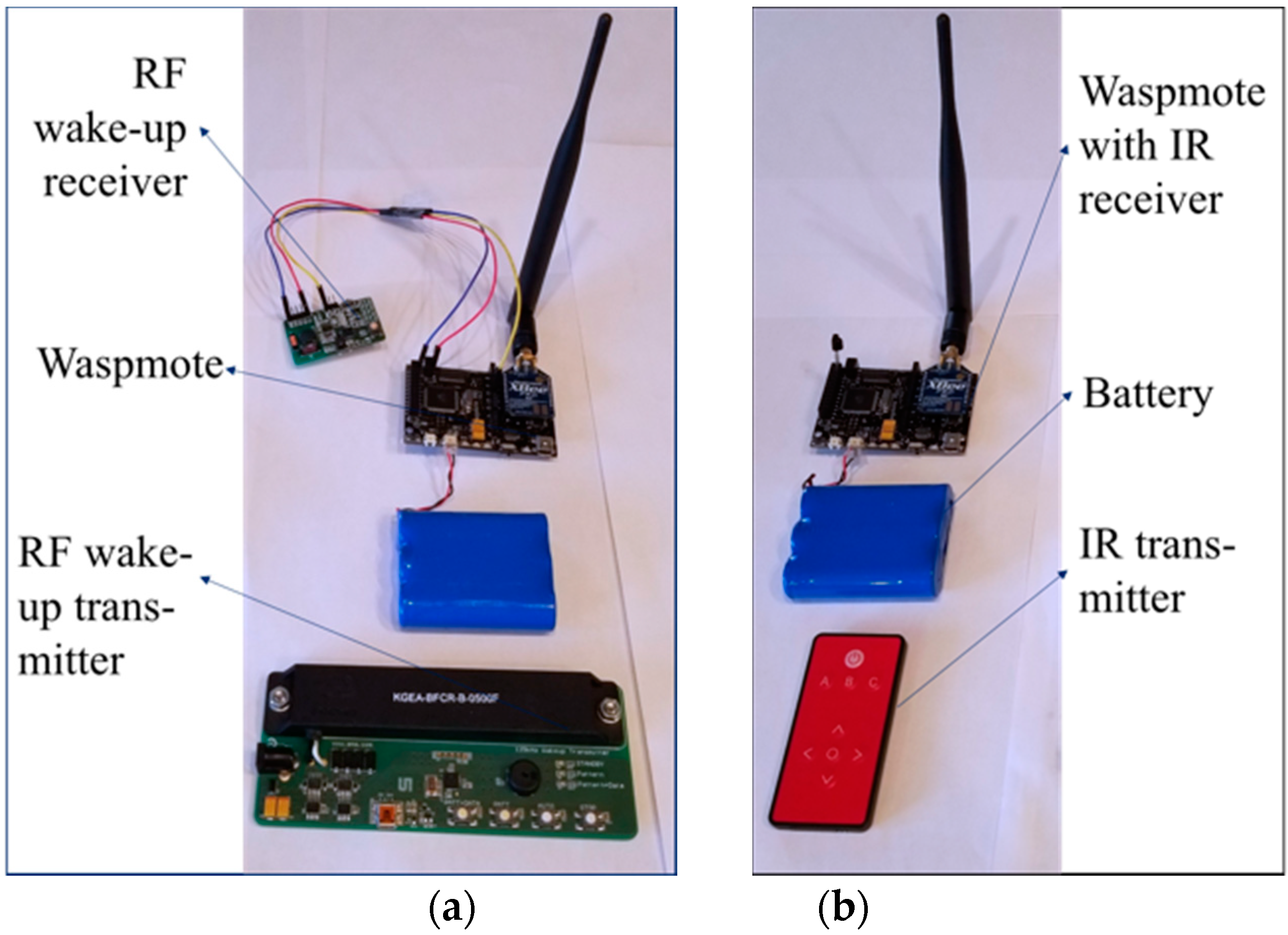
5.1. Proposed RF Design and Implementation
5.2. Infrared Wake-Up Implementation
6. Experimentation and Results
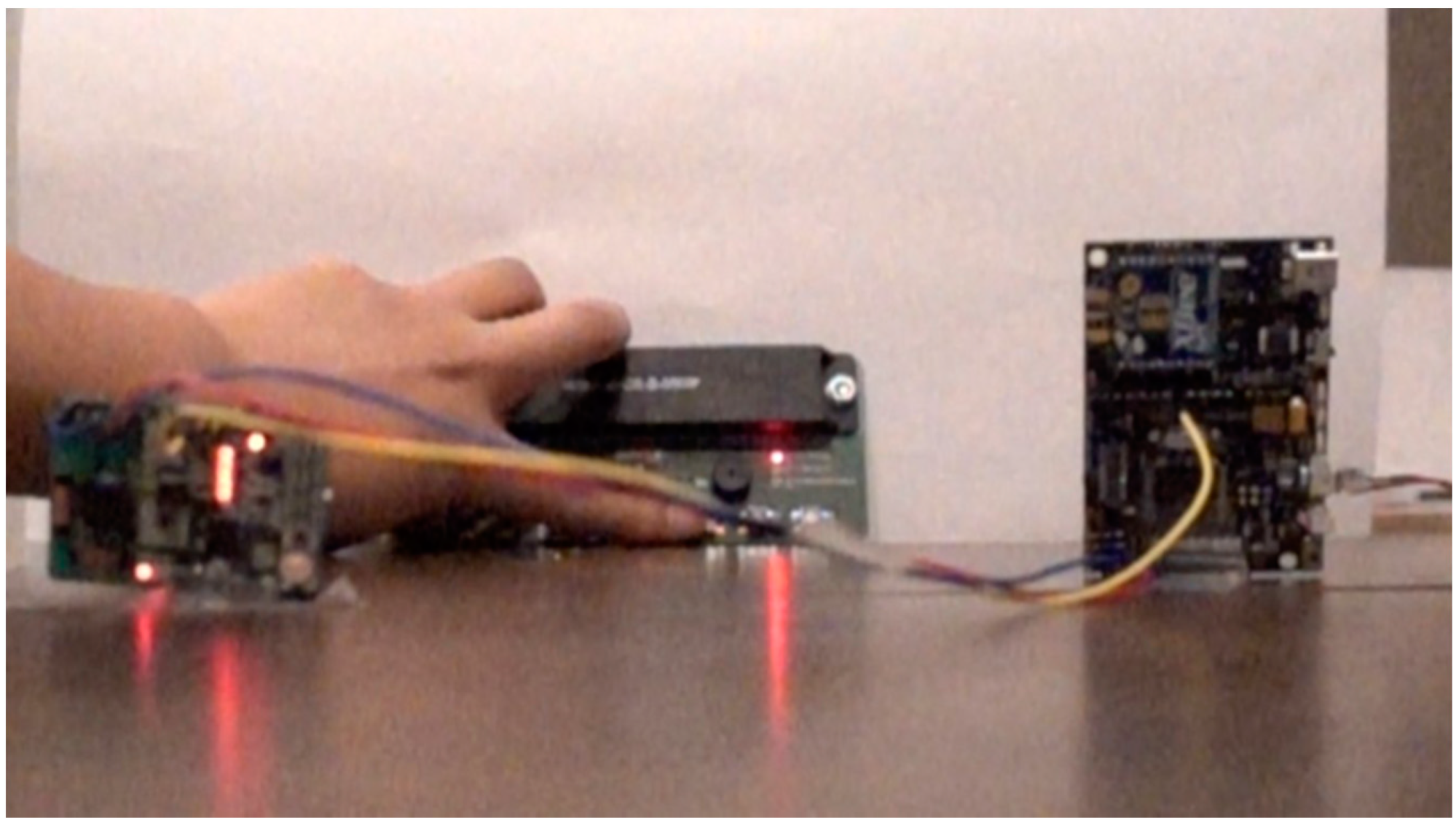
6.1. Physical Verification and Comparison
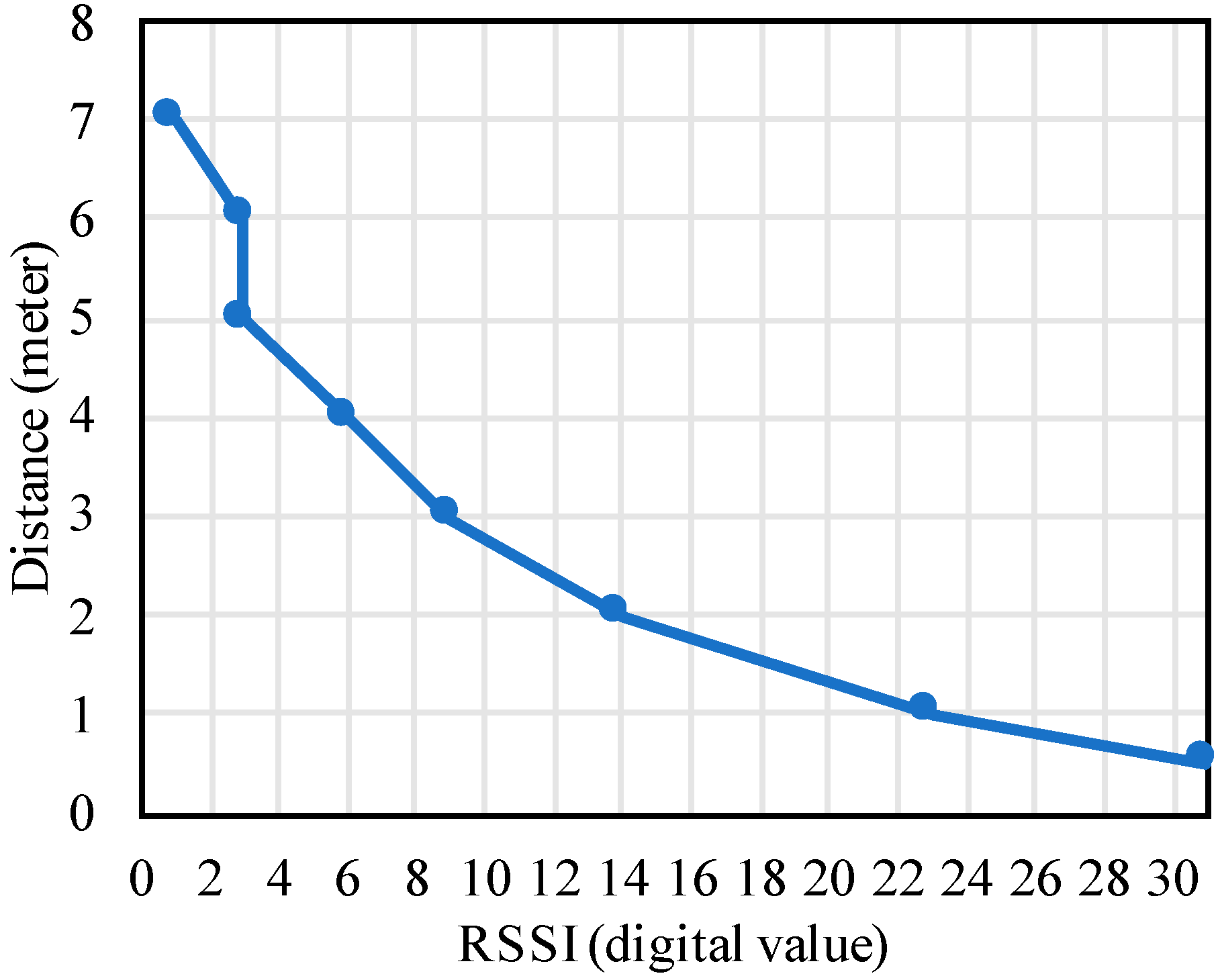
6.2. RF Wake-Up Distance
6.3. RF Wake-Up Delay
- (1)
- When the transmitter sends out the wake-up signal, the LED on the transmitter will flash. This moment is defined as t1.
- (2)
- When the receiver receives the signal and decodes it if the signal matches the pre-stored key, then the LED on the receiver will flash. This moment is t2.
- (3)
- When the receiver sends out the wake-up trigger to the MCU interrupt pin, then the MCU wakes up and the LED on MCU board will flash. This moment is t3.
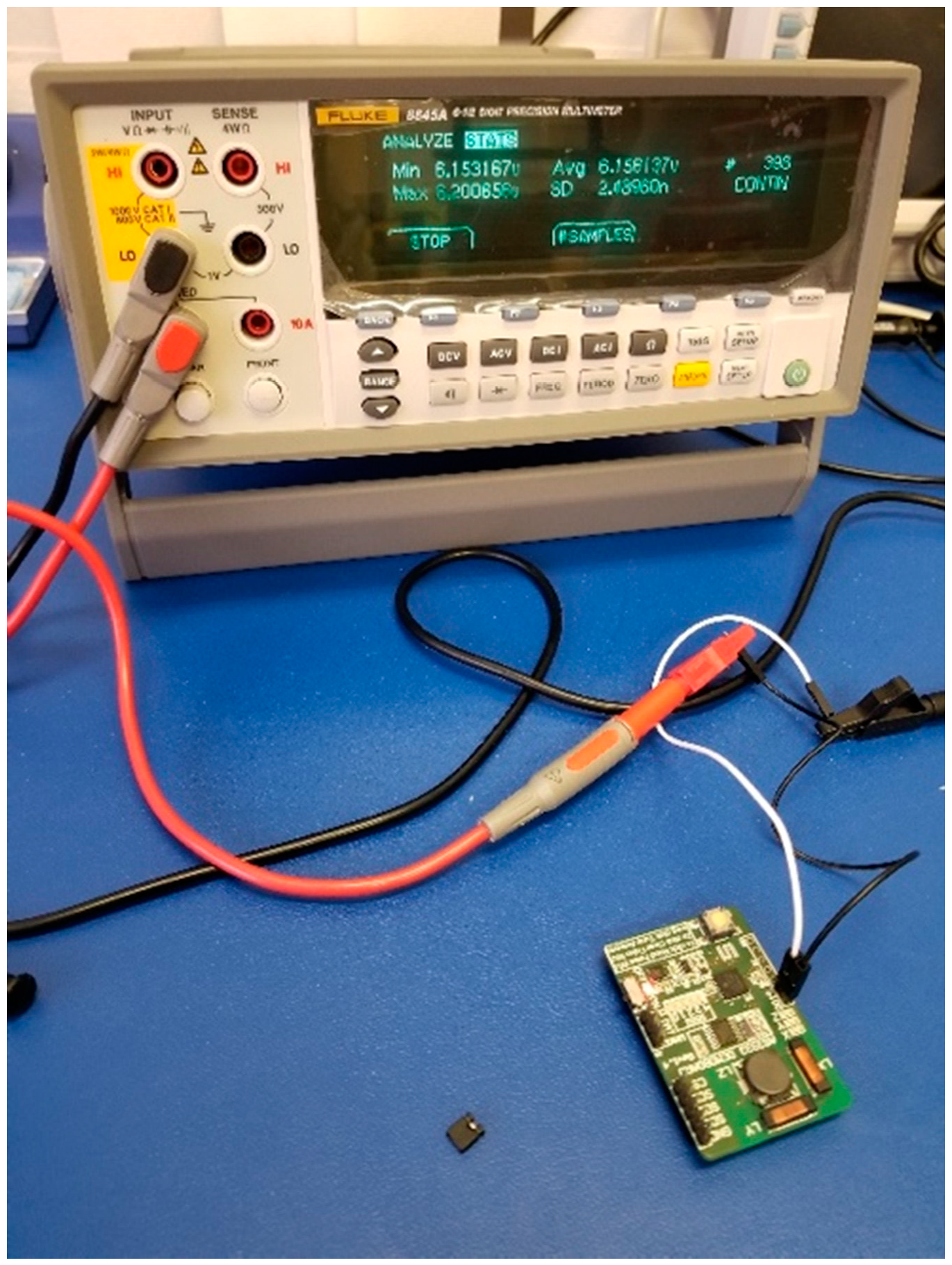
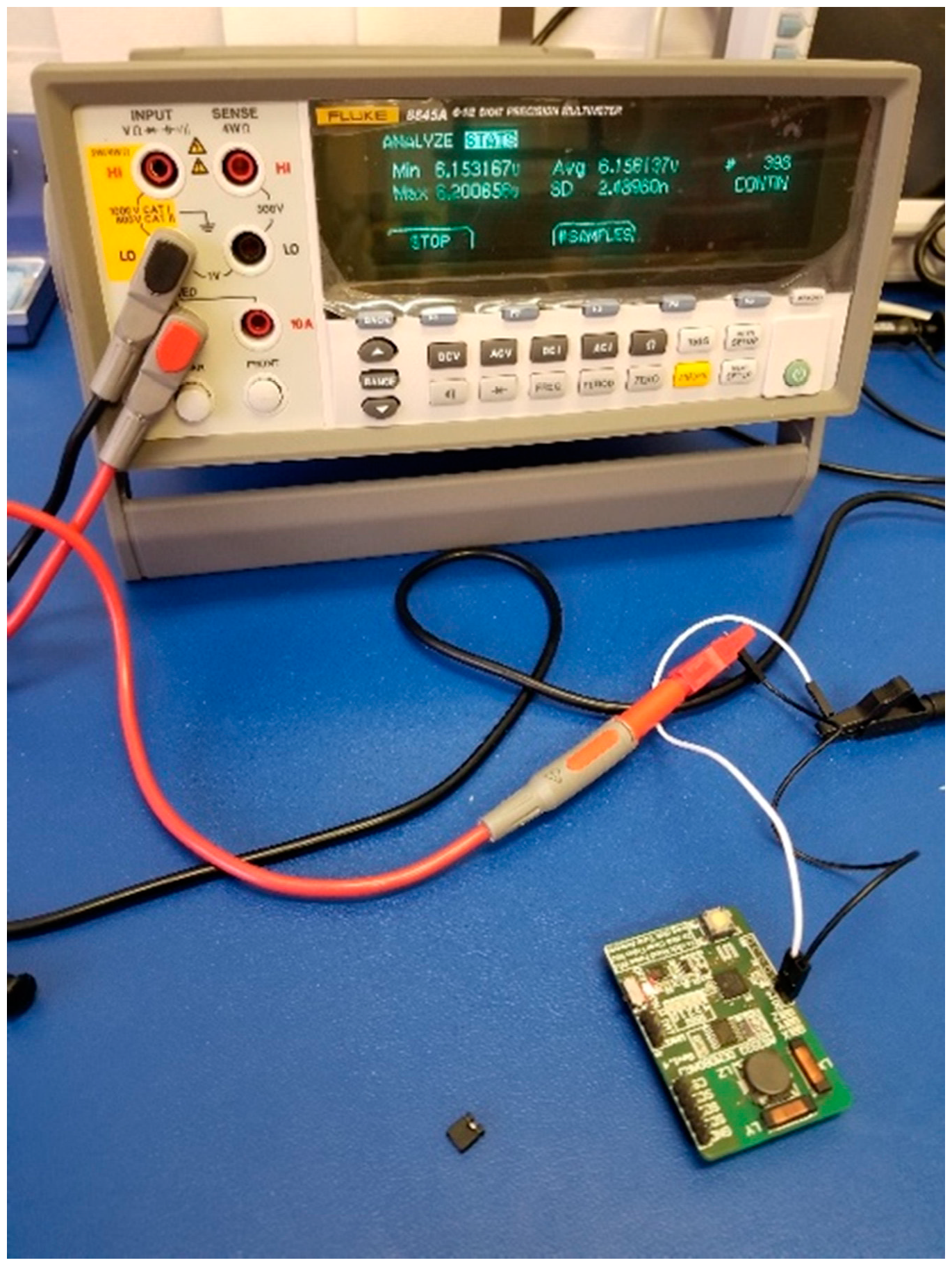
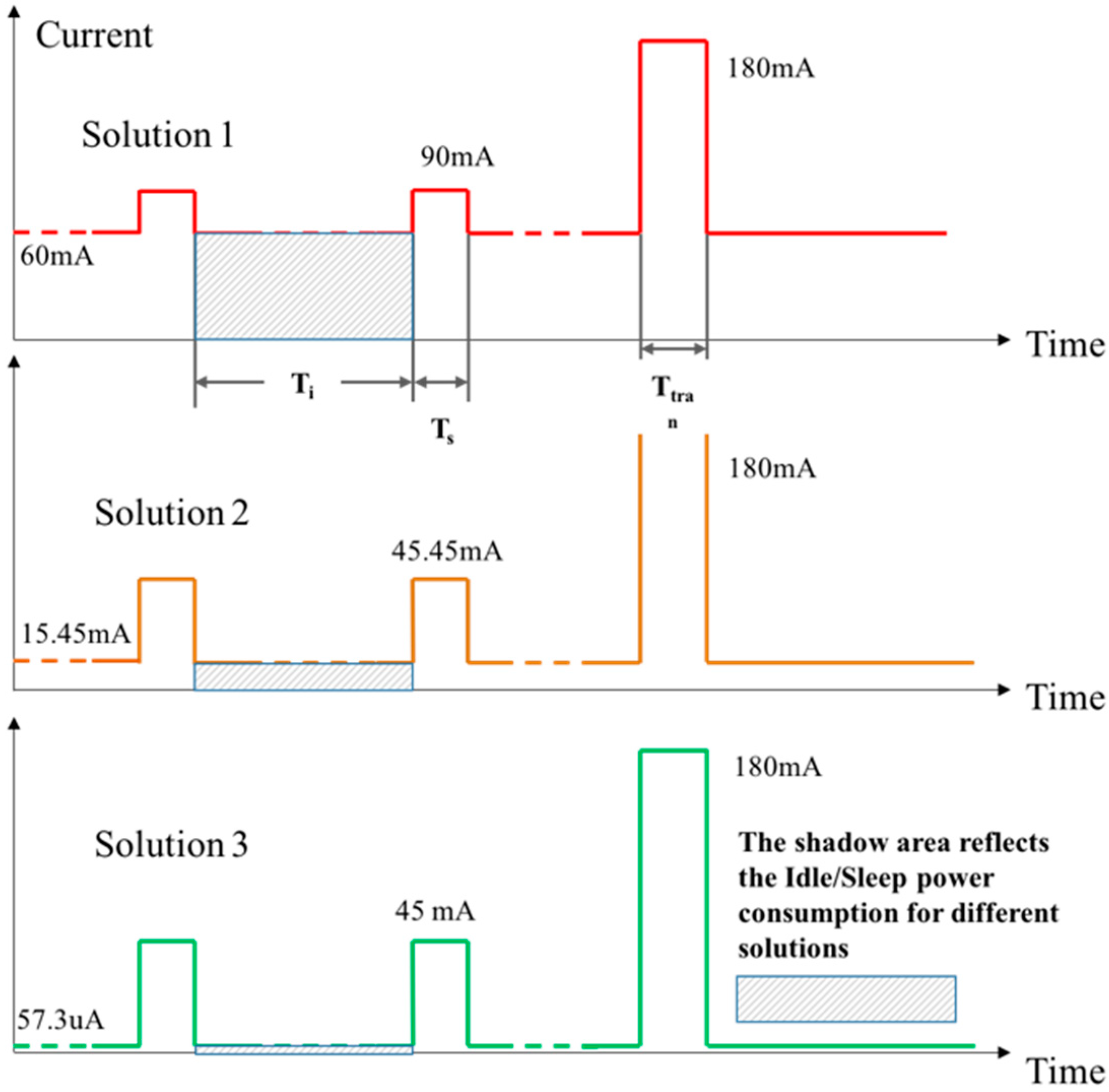
6.4. Energy Consumption Analysis and Verification
- (1)
- Solution 1―the simple duty-cycle method (default in the Libelium sensor network). In this method, no out-band wake-up method was used. We used the XBee as our data communication as well as the wake-up channel. The XBee module on the sensor node stayed in listening mode when no UAV was nearby. Using this solution, the XBee and MCU on the sensor board had to always be turned on.
- (2)
- Solution 2―infrared wake-up method implemented in this paper. The infrared receiver was used as the wake-up channel. Since the IR receiver was connected to the MCU GPIO, it required the MCU to always stay on, while the XBee module could be turned off.
- (3)
- Solution 3―RF wake-up method proposed and implemented in this paper. The RF was used as the wake-up channel. When the receiver was connected to the MCU’s interrupt pin the MCU stayed in sleep mode. The MCU only required 55uA of current while in sleep mode.
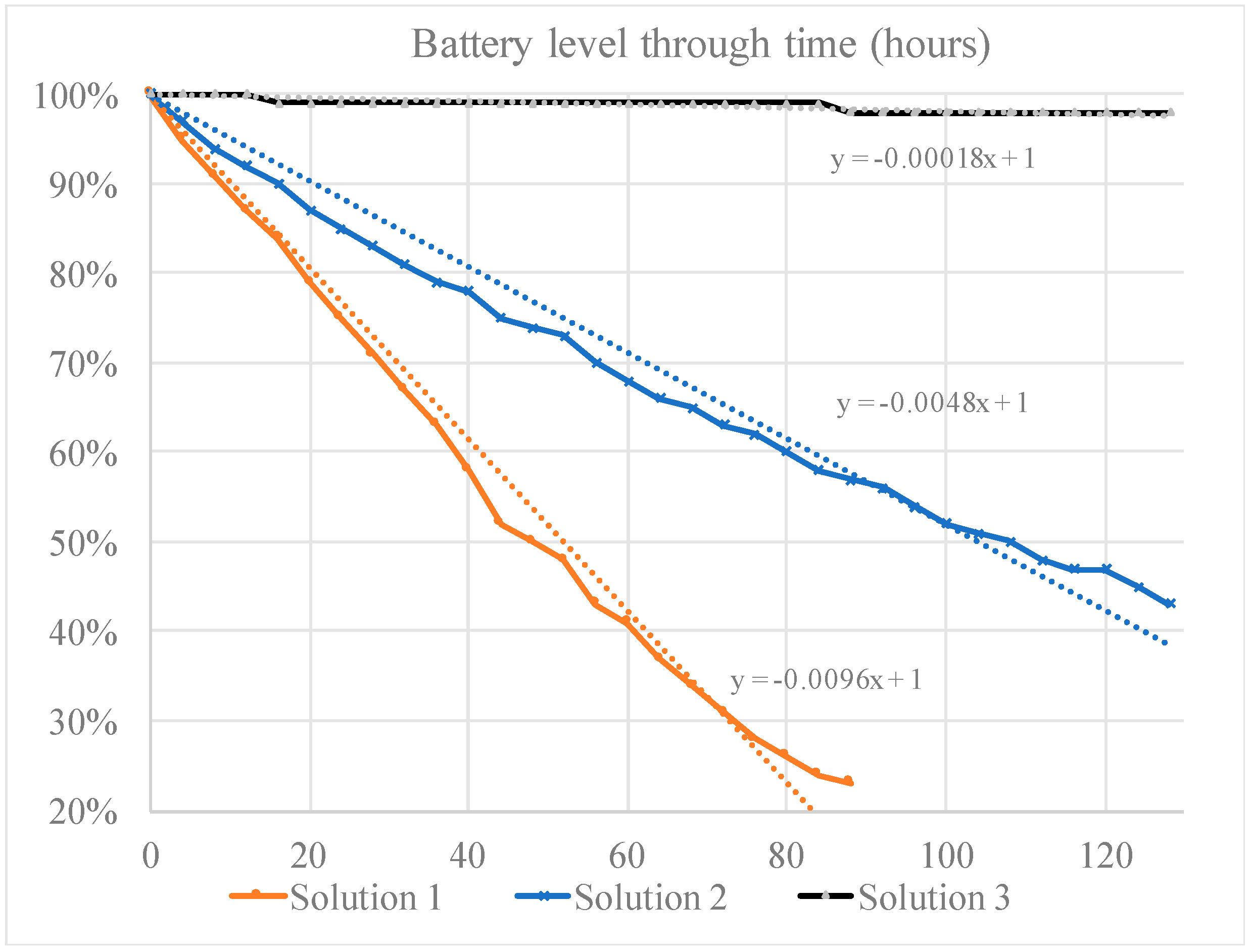
7. Conclusions and Remarks
- The experimental results in this paper indicated that the RF-based out-band wake-up mechanism can save a great amount of energy compared with the other two solutions (the infrared wake-up and the default duty-cycle methods). A direct comparison between the RF-based solution and the infrared-based solution indicated that the RF-based wake-up mechanism had a noticeably better performance in the wake-up range, and had a tremendous improvement in power consumption. Specifically, the results showed that the RF-based wake-up mechanism could potentially save more than 98.4% of the energy that the traditional duty-cycle method would otherwise consume, and 96.8% if an infrared-receiver method was used.
- The energy consumption for different RF wake-up distances was evaluated in this paper. The results indicated that as the distance between the transmitter and receiver increased, the receiver consumed more power (around 8.4 μJ). However, it was argued that this value could be ignored compared to the energy consumed in the listening mode, which was at least 103 times higher.
- The evaluation of wake-up time delay by using a variety of different wake-up signal codes indicated that the time delay was below 80 ms; hence, the delay will not affect most opportunistic sensing applications (wherein the sensors sense the data at one time and transmit at a later time, then the sensors go back to sleep mode until another abrupt event). However, it was pointed out that a stricter time delay evaluation needs to be conducted if synchronization is critical between the sensors.
Author Contributions
Funding
Conflicts of Interest
References
- Toth, C.; Jóźków, G. Remote sensing platforms and sensors: A survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Sense and avoid for unmanned aerial vehicles using ADS-B. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 26 May 2015; pp. 6402–6407. [Google Scholar]
- Ramasamy, S.; Sabatini, R. A unified approach to cooperative and non-cooperative sense-and-avoid. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9 June 2015; pp. 765–773. [Google Scholar]
- Yu, X.; Zhang, Y. Sense and avoid technologies with applications to unmanned aircraft systems: Review and prospects. Prog. Aerosp. Sci. 2015, 74, 152–166. [Google Scholar] [CrossRef]
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, I. A review of wireless sensor technologies and applications in agriculture and food industry: State of the art and current trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [PubMed]
- The Economist. Superstructures. Available online: https://www.economist.com/node/17647603 (accessed on 22 February 2019).
- Pohl, C.; Van Genderen, J.L. Review article multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Narvaez, F.Y.; Reina, G.; Torres-Torriti, M.; Kantor, G.; Cheein, F.A. A survey of ranging and imaging techniques for precision agriculture phenotyping. IEEE/ASME Trans. Mechatron. 2017, 22, 2428–2439. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Kayacan, E.; Ramon, H.; Saeys, W. Robust trajectory tracking error model-based predictive control for unmanned ground vehicles. IEEE/ASME Trans. Mechatron. 2016, 21, 806–814. [Google Scholar] [CrossRef]
- Baggio, A. Wireless sensor networks in precision agriculture. In Proceedings of the ACM Workshop on Real-World Wireless Sensor Networks (REALWSN 2005), Stockholm, Sweden, 20 June 2005; pp. 1567–1576. [Google Scholar]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, N.; Wang, M. Wireless sensors in agriculture and food industry—Recent development and future perspective. Comput. Electron. Agric. 2006, 50, 1–14. [Google Scholar] [CrossRef]
- Dlodlo, N.; Kalezhi, J. The internet of things in agriculture for sustainable rural development. In Proceedings of the 2015 International Conference on Emerging Trends in Networks and Computer Communications (ETNCC), Windhoek, Namibia, 17 May 2015; pp. 13–18. [Google Scholar]
- Ma, J.; Zhou, X.; Li, S.; Li, Z. Connecting agriculture to the internet of things through sensor networks. In Proceedings of the 2011 International Conference on 4th International Conference on Cyber, Physical and Social Computing and Internet of Things (iThings/CPSCom), Dalian, China, 19 October 2011; pp. 184–187. [Google Scholar]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vib. Dig. 2006, 38, 91–130. [Google Scholar] [CrossRef]
- Gao, Y.; Spencer, B.; Ruiz-Sandoval, M. Distributed computing strategy for structural health monitoring. Struct. Control Health Monit. 2006, 13, 488–507. [Google Scholar] [CrossRef] [Green Version]
- Nagayama, T.; Spencer, B.F., Jr. Structural Health Monitoring using Smart Sensors; Newmark Structural Engineering Laboratory, University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2007. [Google Scholar]
- Wang, Y.; Lynch, J.P.; Law, K.H. A wireless structural health monitoring system with multithreaded sensing devices: Design and validation. Struct. Infrastruct. Eng. 2007, 3, 103–120. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N. Quality assessment of unmanned aerial vehicle (uav) based visual inspection of structures. Adv. Struct. Eng. 2014, 17, 289–302. [Google Scholar] [CrossRef]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Yeum, C.M.; Dyke, S.J. Vision-based automated crack detection for bridge inspection. Comput. -Aided Civil Infrastruct. Eng. 2015, 30, 759–770. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Z.; Beard, C. Experimental investigation of aerial–ground network communication towards geospatially large-scale structural health monitoring. J. Civil Struct. Health Monit. 2018, 8, 823–832. [Google Scholar] [CrossRef]
- Fodor, K.; Vidács, A. Efficient routing to mobile sinks in wireless sensor networks. In Proceedings of the 3rd International Conference on Wireless Internet, Austin, TX, USA, 22 October 2007; p. 32. [Google Scholar]
- Pignaton de Freitas, E.; Heimfarth, T.; Netto, I.F.; Lino, C.E.; Pereira, C.E.; Ferreira, A.M.; Wagner, F.R.; Larsson, T. UAV relay network to support WSN connectivity. In Proceedings of the 2010 International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Moscow, Russia, 18 October 2010; pp. 309–314. [Google Scholar]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned aerial vehicle based wireless sensor network for marine-coastal environment monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- Sadeghi, B.; Kanodia, V.; Sabharwal, A.; Knightly, E. Opportunistic media access for multirate ad hoc networks. In Proceedings of the 8th Annual International Conference on Mobile Computing and Networking, Atlanta, GA, USA, 23 September 2002; pp. 24–35. [Google Scholar]
- Biswas, S.; Morris, R. Exor: Opportunistic multi-hop routing for wireless networks. In Proceedings of the ACM SIGCOMM on Computer Communication Review, Philadelphia, PA, USA, 1 October 2005; pp. 133–144. [Google Scholar]
- Small, T.; Haas, Z.J. Resource and performance tradeoffs in delay-tolerant wireless networks. In Proceedings of the 2005 ACM SIGCOMM workshop on Delay-Tolerant Networking, Philadelphia, PA, USA, 22 August 2005; pp. 260–267. [Google Scholar]
- Arnaboldi, V.; Conti, M.; Delmastro, F. Implementation of cameo: A context-aware middleware for opportunistic mobile social networks. In Proceedings of the 2011 IEEE International Symposium on World of Wireless, Mobile and Multimedia Networks (WoWMoM), Lucca, Italy, 20 June 2011; pp. 1–3. [Google Scholar]
- Juang, P.; Oki, H.; Wang, Y.; Martonosi, M.; Peh, L.S.; Rubenstein, D. Energy-efficient computing for wildlife tracking: Design tradeoffs and early experiences with zebranet. ACM SIGPLAN Not. 2002, 37, 96–107. [Google Scholar] [CrossRef]
- Guo, S.; He, L.; Gu, Y.; Jiang, B.; He, T. Opportunistic flooding in low-duty-cycle wireless sensor networks with unreliable links. IEEE Trans. Comput. 2014, 63, 2787–2802. [Google Scholar]
- Fu, S.; Wu, J.; Wen, H.; Cai, Y.; Wu, B. Software defined wireline-wireless cross-networks: Framework, challenges, and prospects. IEEE Commun. Mag. 2018, 56, 145–151. [Google Scholar] [CrossRef]
- Chen, J. Development of Aerial-Ground Sensing Network: Architecture, Sensor Activation, and Spatial Path-Energy Optimization; University of Missouri-Kansas City: Kansas City, MO, USA, 2019. [Google Scholar]
- Collotta, M.; Gentile, L.; Pau, G.; Scatà, G. A dynamic algorithm to improve industrial wireless sensor networks management. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25 October 2012; pp. 2802–2807. [Google Scholar]
- Setiawan, D.; Aziz, A.A.; Kim, D.I.; Choi, K.W. Experiment, modeling, and analysis of wireless-powered sensor network for energy neutral power management. IEEE Syst. J. 2017, 12, 3381–3392. [Google Scholar] [CrossRef]
- Zhao, J.; Yao, L.; Xue, R.-F.; Li, P.; Je, M.; Xu, Y.P. An integrated wireless power management and data telemetry IC for high-compliance-voltage electrical stimulation applications. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 113–124. [Google Scholar] [CrossRef] [PubMed]
- He, D.; Fahimi, B. Power management of a self-powered multi-parameter wireless sensor for iot application. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4 March 2018; pp. 1380–1385. [Google Scholar]
- Raghunathan, V.; Schurgers, C.; Park, S.; Srivastava, M.B. Energy-aware wireless microsensor networks. IEEE Signal Process. Mag. 2002, 19, 40–50. [Google Scholar] [CrossRef] [Green Version]
- Polastre, J.; Hill, J.; Culler, D. Versatile low power media access for wireless sensor networks. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3 November 2004; pp. 95–107. [Google Scholar]
- Ye, W.; Heidemann, J.; Estrin, D. An energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the IEEE Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2002), New York, NY, USA, 23 June 2002; pp. 1567–1576. [Google Scholar]
- Ye, W.; Heidemann, J.; Estrin, D. Medium access control with coordinated adaptive sleeping for wireless sensor networks. IEEE/ACM Trans. Netw. 2004, 12, 493–506. [Google Scholar] [CrossRef]
- Dam, T.V.; Langendoen, K. An adaptive energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5 November 2003; pp. 171–180. [Google Scholar]
- Piyare, R.; Murphy, A.L.; Kiraly, C.; Tosato, P.; Brunelli, D. Ultra low power wake-up radios: A hardware and networking survey. IEEE Commun. Surv. Tutor. 2017, 19, 2117–2157. [Google Scholar] [CrossRef]
- Ye, D. A self-adaptive sleep/wake-up scheduling approach for wireless sensor networks. IEEE Trans. Cybern. 2018, 48, 979–992. [Google Scholar] [CrossRef] [PubMed]
- Demirkol, I.; Ersoy, C.; Onur, E. Wake-up receivers for wireless sensor networks: Benefits and challenges. IEEE Wirel. Commun. 2009, 16, 88–96. [Google Scholar] [CrossRef]
- Hakkinen, T.; Vanhala, J. Ultra-low power wake-up circuit for short-range wireless communication. In Proceedings of the 4th International Conference on Intelligent Environments (IE), Seattle, WA, USA, 21 July 2008; pp. 1–4. [Google Scholar]
- Han, J.; Choi, C.S.; Lee, I. More efficient home energy management system based on zigbee communication and infrared remote controls. IEEE Trans. Consum. Electron. 2011, 57, 85–89. [Google Scholar]
- Kim, G.; Lee, Y.; Bang, S.; Lee, I.; Kim, Y.; Sylvester, D.; Blaauw, D. A 695 pW standby power optical wake-up receiver for wireless sensor nodes. In Proceedings of the 2012 IEEE Custom Integrated Circuits Conference (CICC), San Jose, CA, USA, 9 Sepember 2012; pp. 1–4. [Google Scholar]
- Mathews, J.; Barnes, M.; Young, A.; Arvind, D. Low power wake-up in wireless sensor networks using free space optical communications. In Proceedings of the 2010 Fourth International Conference on Sensor Technologies and Applications (SENSORCOMM), Venice, Italy, 18 July 2010; pp. 256–261. [Google Scholar]
- Hoflinger, F.; Gamm, G.U.; Albesa, J.; Reindl, L.M. Smartphone remote control for home automation applications based on acoustic wake-up receivers. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Montevideo, Uruguay, 12 May 2014; pp. 1580–1583. [Google Scholar]
- Sánchez, A.; Blanc, S.; Yuste, P.; Perles, A.; Serrano, J.J. An ultra-low power and flexible acoustic modem design to develop energy-efficient underwater sensor networks. Sensors 2012, 12, 6837–6856. [Google Scholar] [CrossRef] [PubMed]
- Yadav, K.; Kymissis, I.; Kinget, P.R. A 4.4 W wake-up receiver using ultrasound data. IEEE J. Solid-State Circuits 2013, 48, 649–660. [Google Scholar] [CrossRef]
- Lattanzi, E.; Dromedari, M.; Freschi, V.; Bogliolo, A. A sub-a ultrasonic wake-up trigger with addressing capability for wireless sensor nodes. ISRN Sens. Netw. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Jackson, J.C.; Summan, R.; Dobie, G.I.; Whiteley, S.M.; Pierce, S.G.; Hayward, G. Time-of-flight measurement techniques for airborne ultrasonic ranging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 343–355. [Google Scholar] [CrossRef] [PubMed]
- Jiang, W.; Wright, W.M. Indoor airborne ultrasonic wireless communication using OFDM methods. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1345–1353. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Cho, H.; Xi, Y.; Kim, M.; Kwon, S.; Lim, J.; Yang, Y. CMOS passive wake-up circuit for sensor network applications. Microw. Opt. Technol. Lett. 2010, 52, 597–600. [Google Scholar] [CrossRef]
- Chung, C.; Kim, Y.-H.; Ki, T.-H.; Bae, K.; Kim, J. Fully integrated ultra-low-power 900 mHz RF transceiver for batteryless wireless microsystems. In Proceedings of the 2011 18th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Beirut, Lebanon, 11 December 2011; pp. 196–199. [Google Scholar]
- Kamalinejad, P.; Keikhosravy, K.; Magno, M.; Mirabbasi, S.; Leung, V.C.; Benini, L. A high-sensitivity fully passive wake-up radio front-end for wireless sensor nodes. In Proceedings of the 2014 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 10 January 2014; pp. 209–210. [Google Scholar]
- Gu, L.; Stankovic, J.A. Radio-triggered wake-up for wireless sensor networks. Real-Time Syst. 2005, 29, 157–182. [Google Scholar] [CrossRef]
- Chen, L.; Cool, S.; Ba, H.; Heinzelman, W.; Demirkol, I.; Muncuk, U.; Chowdhury, K.; Basagni, S. Range extension of passive wake-up radio systems through energy harvesting. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013; pp. 1549–1554. [Google Scholar]
- Chen, L.; Warner, J.; Yung, P.L.; Zhou, D.; Heinzelman, W.; Demirkol, I.; Muncuk, U.; Chowdhury, K.; Basagni, S. Reach2-mote: A range-extending passive wake-up wireless sensor node. ACM Trans. Sen. Netw. 2015, 11, 1–33. [Google Scholar] [CrossRef]
- Chen, L.; Warner, J.; Heinzelman, W.; Demirkol, I. MH-reach-mote: Supporting multi-hop passive radio wake-up for wireless sensor networks. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8 June 2015; pp. 6512–6518. [Google Scholar]
- Ba, H.; Demirkol, I.; Heinzelman, W. Feasibility and benefits of passive RFID wake-up radios for wireless sensor networks. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM 2010), Miami, FL, USA, 6 December 2010; pp. 1–5. [Google Scholar]
- Ba, H.; Demirkol, I.; Heinzelman, W. Passive wake-up radios: From devices to applications. Ad Hoc Netw. 2013, 11, 2605–2621. [Google Scholar] [CrossRef] [Green Version]
- Petrioli, C.; Spenza, D.; Tommasino, P.; Trifiletti, A. A novel wake-up receiver with addressing capability for wireless sensor nodes. In Proceedings of the 2014 IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina Del Rey, CA, USA, 26 May 2014; pp. 18–25. [Google Scholar]
- Pletcher, N.M.; Gambini, S.; Rabaey, J. A 52 W wake-up receiver with 72 dBm sensitivity using an uncertain-if architecture. IEEE J. Solid-State Circuits 2009, 44, 269–280. [Google Scholar] [CrossRef]
- Magno, M.; Jelicic, V.; Srbinovski, B.; Bilas, V.; Popovici, E.; Benini, L. Design, implementation, and performance evaluation of a flexible low-latency nanowatt wake-up radio receiver. IEEE Trans. Ind. Inform. 2016, 12, 633–644. [Google Scholar] [CrossRef]
- Oller, J.; Demirkol, I.; Casademont, J.; Paradells, J. Design, development, and performance evaluation of a low-cost, low-power wake-up radio system for wireless sensor networks. ACM Trans. Sens. Netw. (TOSN) 2013, 10, 11. [Google Scholar] [CrossRef]
- Oller, J.; Garcia, E.; Lopez, E.; Demirkol, I.; Casademont, J.; Paradells, J.; Gamm, U.; Reindl, L. IEEE 802.11-enabled wake-up radio system: Design and performance evaluation. Electron. Lett. 2014, 50, 1484–1486. [Google Scholar] [CrossRef]
- Oller, J.; Demirkol, I.; Casademont, J.; Paradells, J.; Gamm, G.U.; Reindl, L. Performance evaluation and comparative analysis of subcarrier modulation wake-up radio systems for energy-efficient wireless sensor networks. Sensors 2013, 14, 22–51. [Google Scholar] [CrossRef] [PubMed]
- Bdiri, S.; Derbel, F. An ultra-low power wake-up receiver for realtime constrained wireless sensor networks. In Proceedings of the AMA Conferences, Nürnberg, Germany, 19 May 2015; pp. 612–617. [Google Scholar]
- Sutton, F.; Buchli, B.; Beutel, J.; Thiele, L. Zippy: On-demand network flooding. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, South Korea, 1 November 2015; pp. 45–58. [Google Scholar]
- Prinn, M.; Moore, L.; Hayes, M.; O’Flynn, B. Comparing low power listening techniques with wake-up receiver technology. In Proceedings of the SMART 2014: The Third International Conference on Smart Systems, Devices and Technologies, Paris, France, 20 July 2014; pp. 20–24. [Google Scholar]
- Libelim. Waspmote―open source sensor node for the internet of things. Available online: http://www.libelium.com/products/waspmote/ (accessed on 22 February 2019).
- AG, a. As3933rssi to voltage conversion. 2014.
- AG, a. As39333d low frequency wake-up receiver. 2015.
- Milosiu, H.; Oehler, F.; Eppel, M. Sub-10 µA data reception with low latency using a 180-nm CMOS wake-up receiver at 868 mHz. In Proceedings of the IEEE Semiconductor Conference Dresden (SCD), Dresden, Germany, 27 September 2011; pp. 1–4. [Google Scholar]
- Kumberg, T.; Tannhaeuser, R.; Gamm, G.; Reindl, L. Energy improved wake-up strategy for wireless sensor networks. In Proceedings of the ITG/GMA Symposium on Sensors and Measuring Systems, Nuremberg, Germany, 3 June 2014; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance (m) | Average Current (uA) | Working Duration (ms) |
|---|---|---|
| 0.5 | 8.0 | 193 |
| 1 | 8.0 | 198 |
| 2 | 8.2 | 198 |
| 2.5 | 8.1 | 198 |
| 3 | 9.4 | 459 |
| 4 | 9.4 | 462 |
| 7 | 9.5 | 458 |
| Coding Pattern | Time between t1 and t2 | Time between t2 and t3 | Total Time Delay |
|---|---|---|---|
| 16-bit, Single pattern | 12 | 49 | 61 |
| 32-bit, Single pattern | 18 | 49 | 67 |
| 16-bit, Double pattern | 18 | 49 | 67 |
| 32-bit, Double pattern | 31 | 48 | 79 |
| Hardware | Current |
|---|---|
| MCU | 15 mA |
| Sensors | 30 mA |
| XBee | 165 mA/45 mA * |
| IR | 0.45 mA |
| RF | 2.3 uA/6.1 uA ** |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Dai, Z.; Chen, Z. Development of Radio-Frequency Sensor Wake-Up with Unmanned Aerial Vehicles as an Aerial Gateway. Sensors 2019, 19, 1047. https://doi.org/10.3390/s19051047
Chen J, Dai Z, Chen Z. Development of Radio-Frequency Sensor Wake-Up with Unmanned Aerial Vehicles as an Aerial Gateway. Sensors. 2019; 19(5):1047. https://doi.org/10.3390/s19051047
Chicago/Turabian StyleChen, Jianfei, Zhaohua Dai, and ZhiQiang Chen. 2019. "Development of Radio-Frequency Sensor Wake-Up with Unmanned Aerial Vehicles as an Aerial Gateway" Sensors 19, no. 5: 1047. https://doi.org/10.3390/s19051047
APA StyleChen, J., Dai, Z., & Chen, Z. (2019). Development of Radio-Frequency Sensor Wake-Up with Unmanned Aerial Vehicles as an Aerial Gateway. Sensors, 19(5), 1047. https://doi.org/10.3390/s19051047