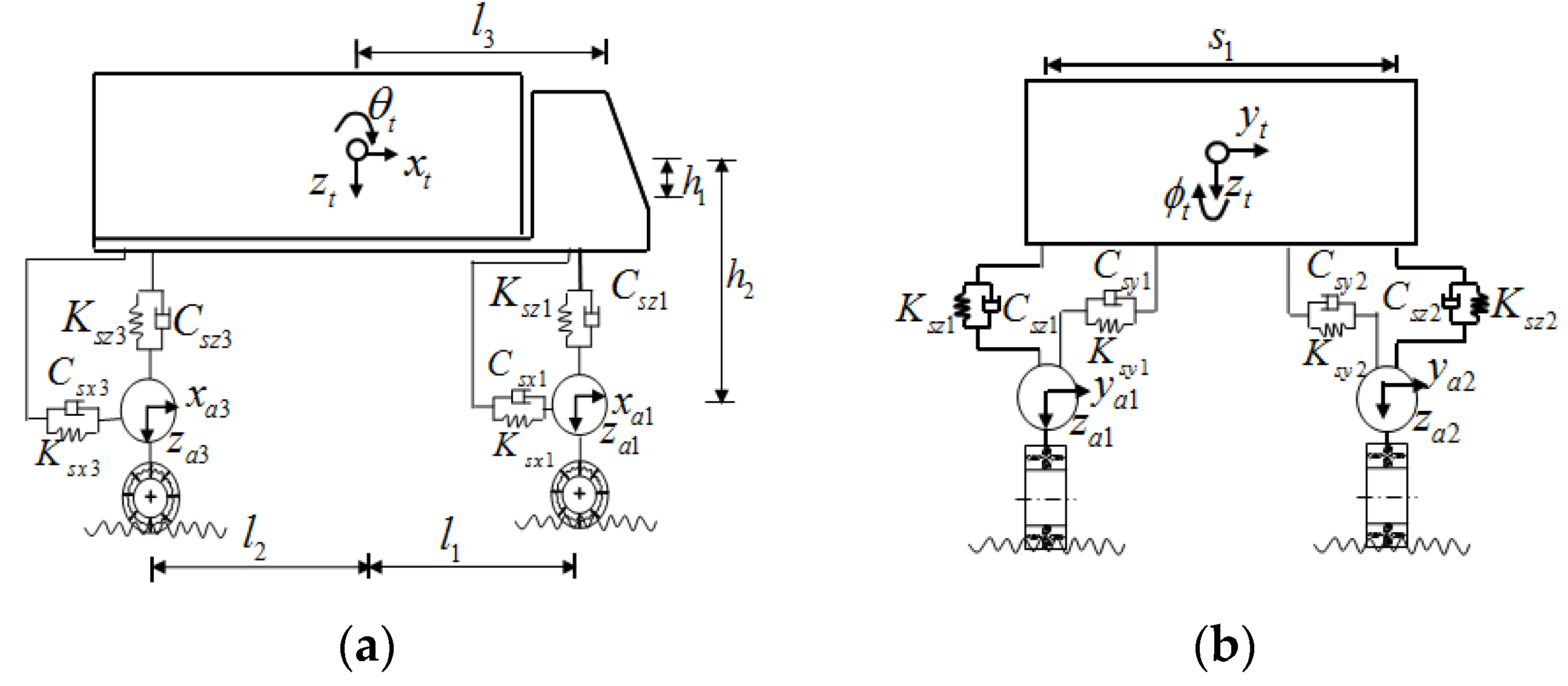
Figure 1.
An 18-DOF full-scale vehicle model. (a) Elevation view. (b) Cross-section view.
Figure 1.
An 18-DOF full-scale vehicle model. (a) Elevation view. (b) Cross-section view.
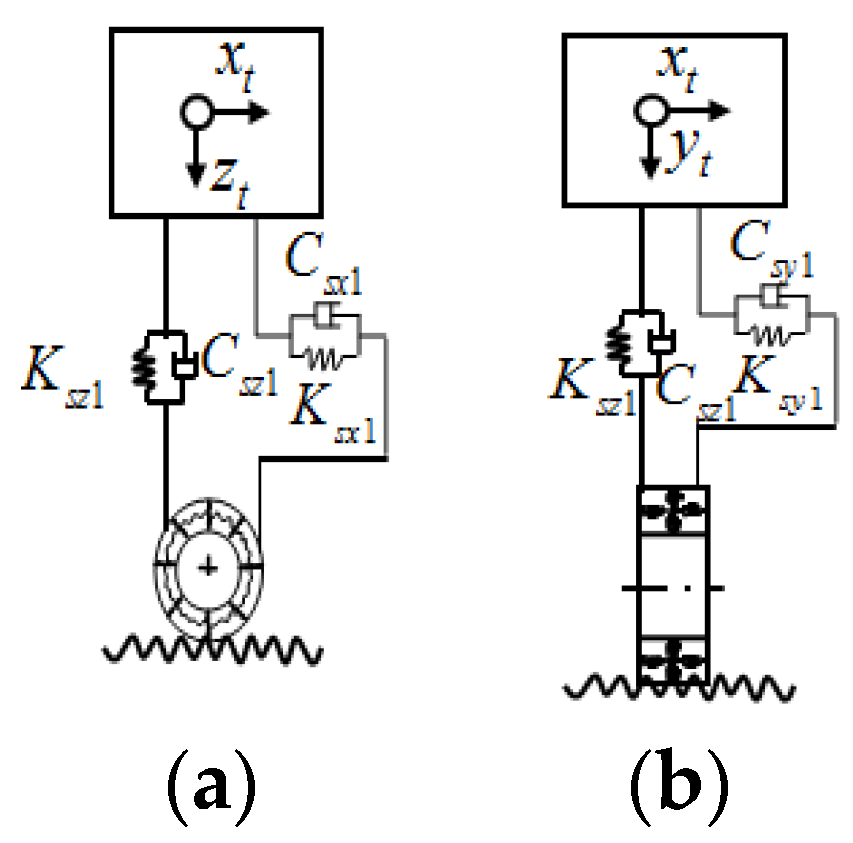
Figure 2.
A 3-DOFs vehicle model with three-dimensional (3-D) vibrations. (a) Elevation view. (b) Cross-section view.
Figure 2.
A 3-DOFs vehicle model with three-dimensional (3-D) vibrations. (a) Elevation view. (b) Cross-section view.
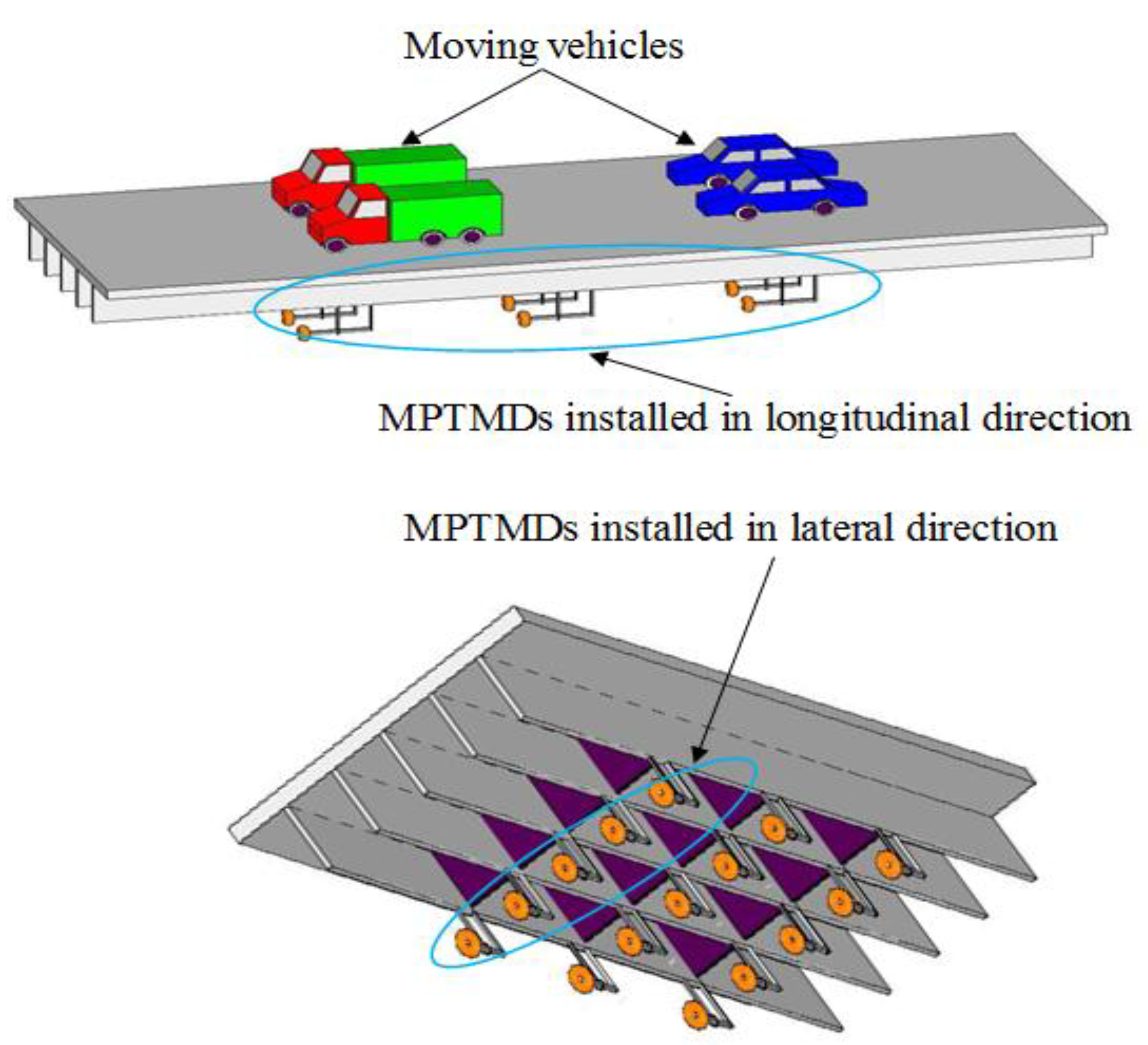
Figure 3.
Traffic-bridge coupled system with multiple pounding tuned mass dampers (MPTMDs).
Figure 3.
Traffic-bridge coupled system with multiple pounding tuned mass dampers (MPTMDs).
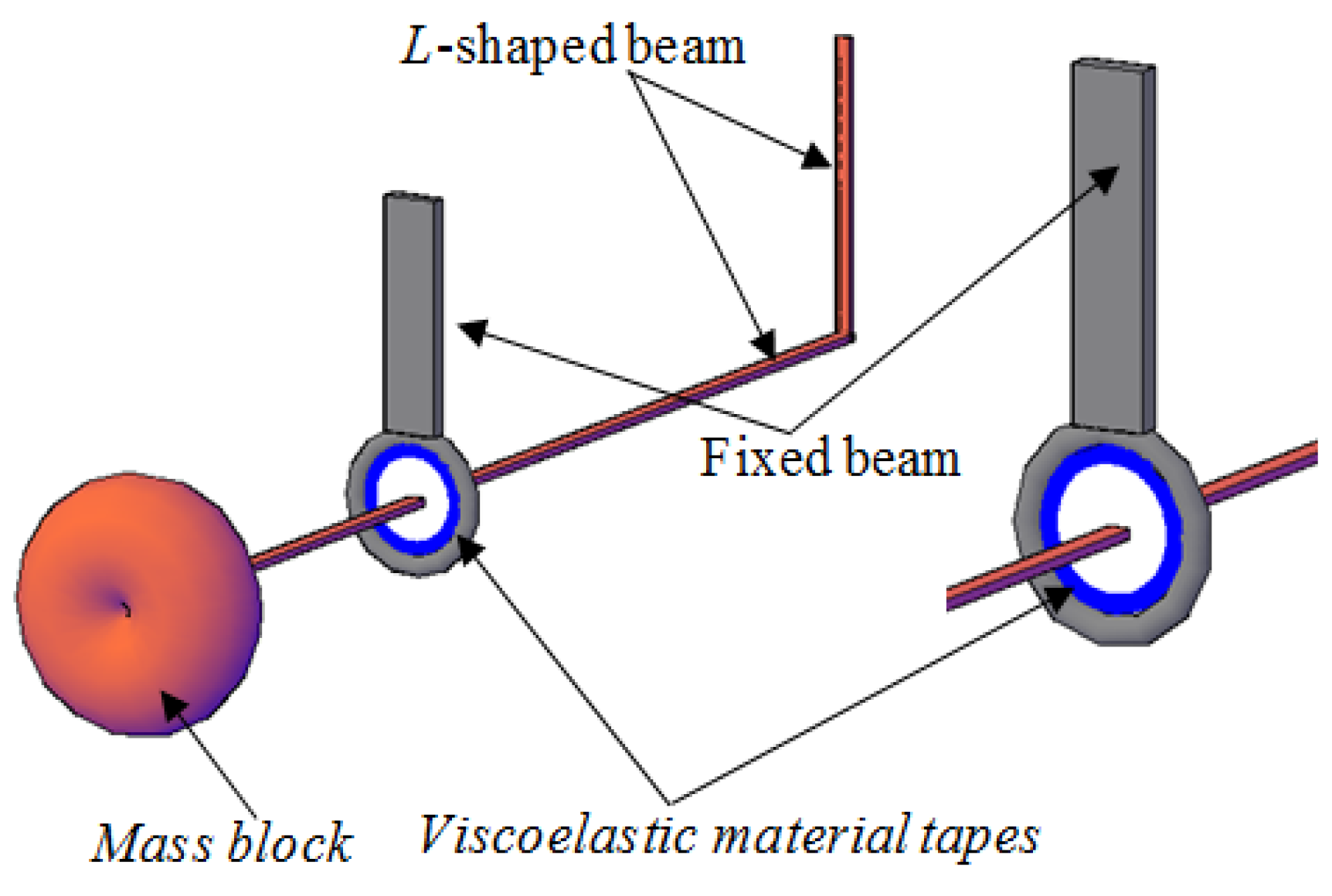
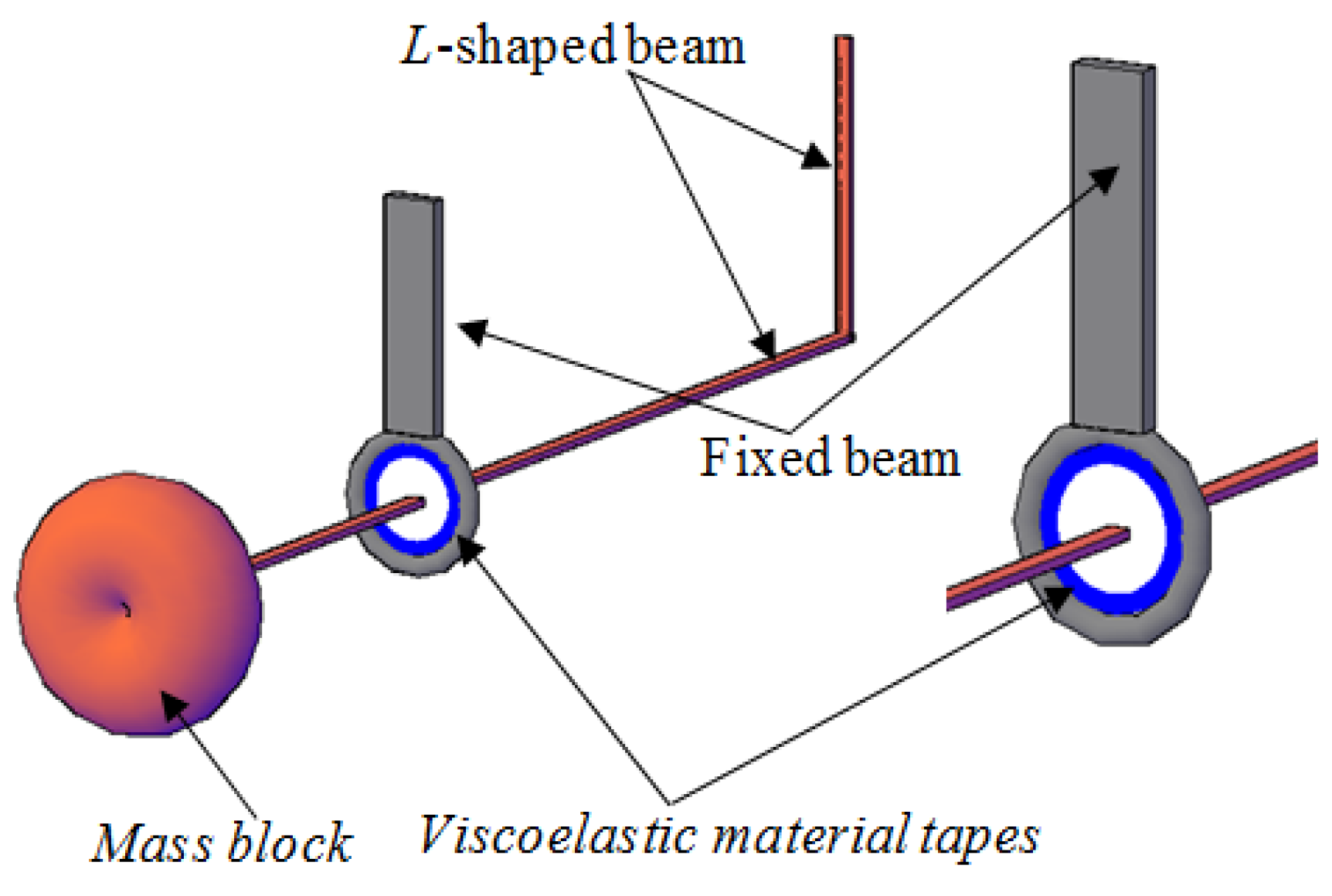
Figure 4.
Components of a pounding tuned mass damper (PTMD) system.
Figure 4.
Components of a pounding tuned mass damper (PTMD) system.
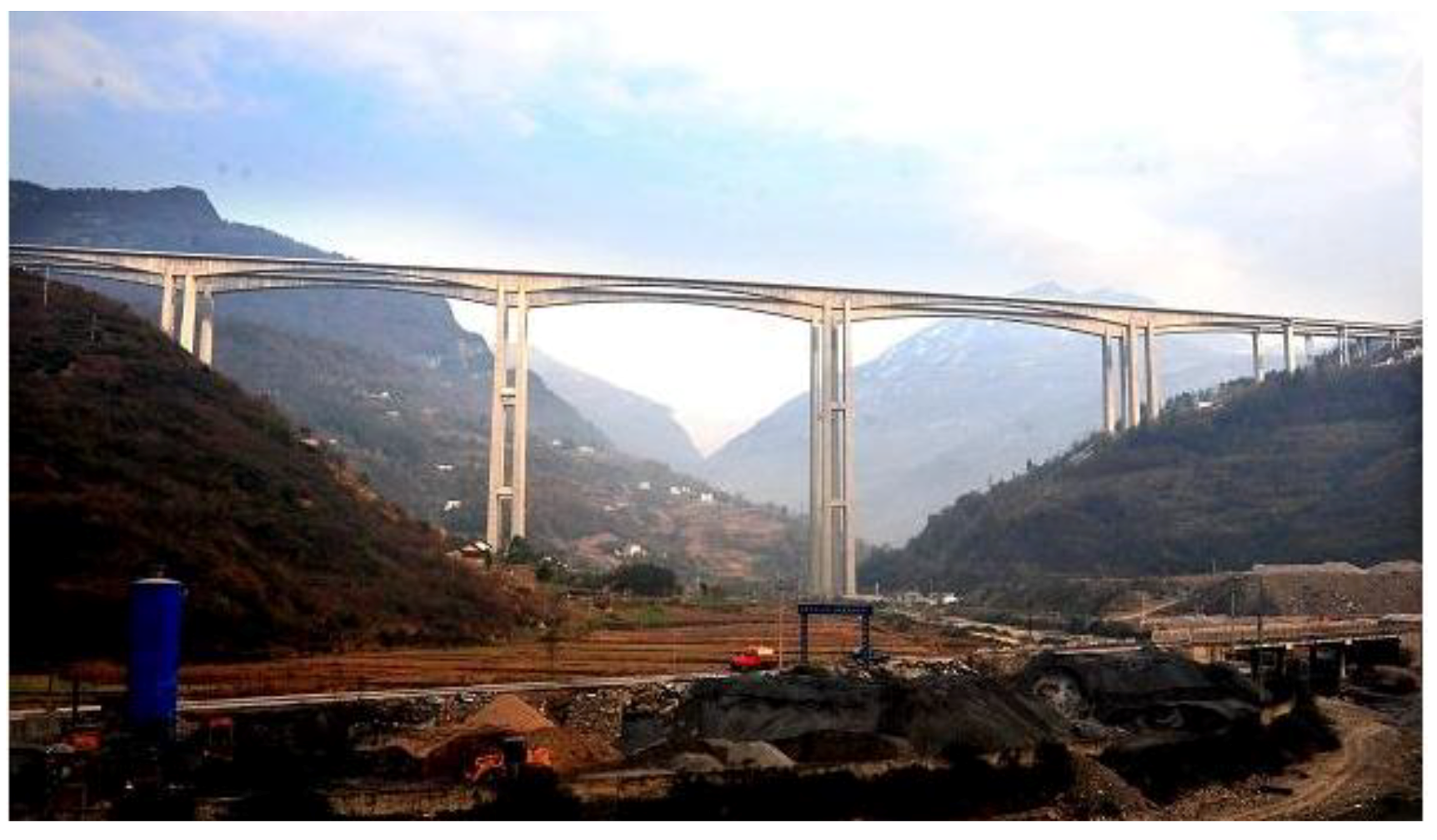
Figure 5.
A typical high-pier bridge.
Figure 5.
A typical high-pier bridge.
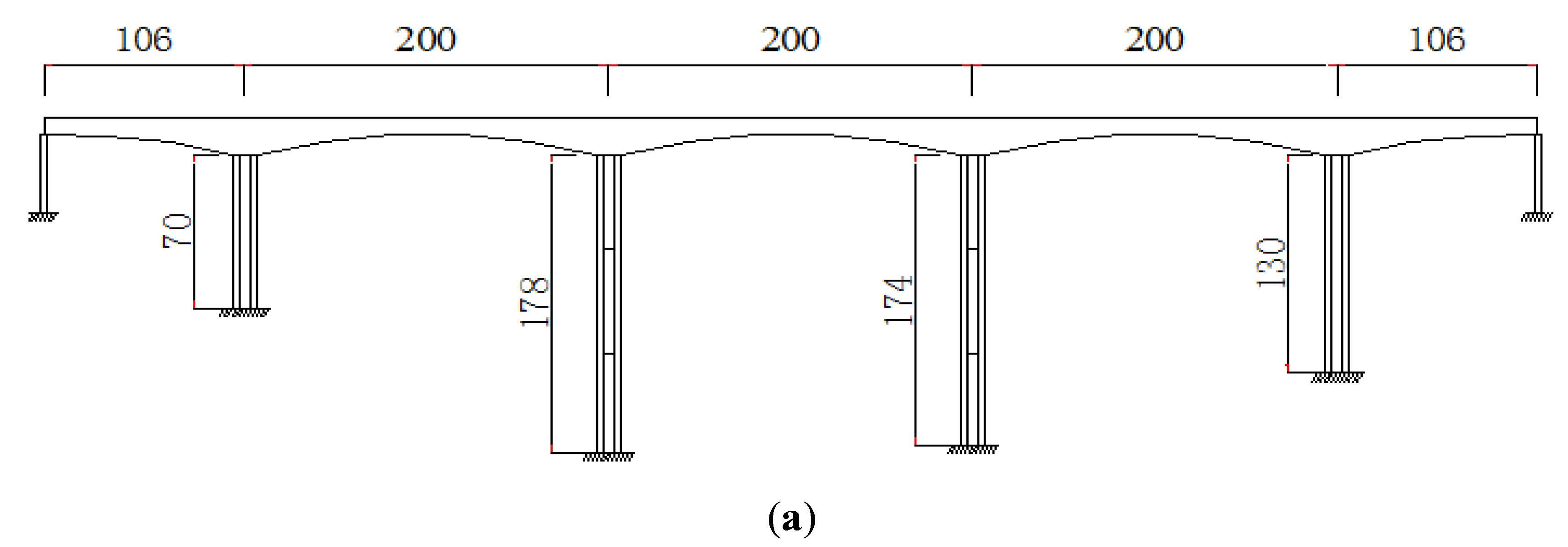
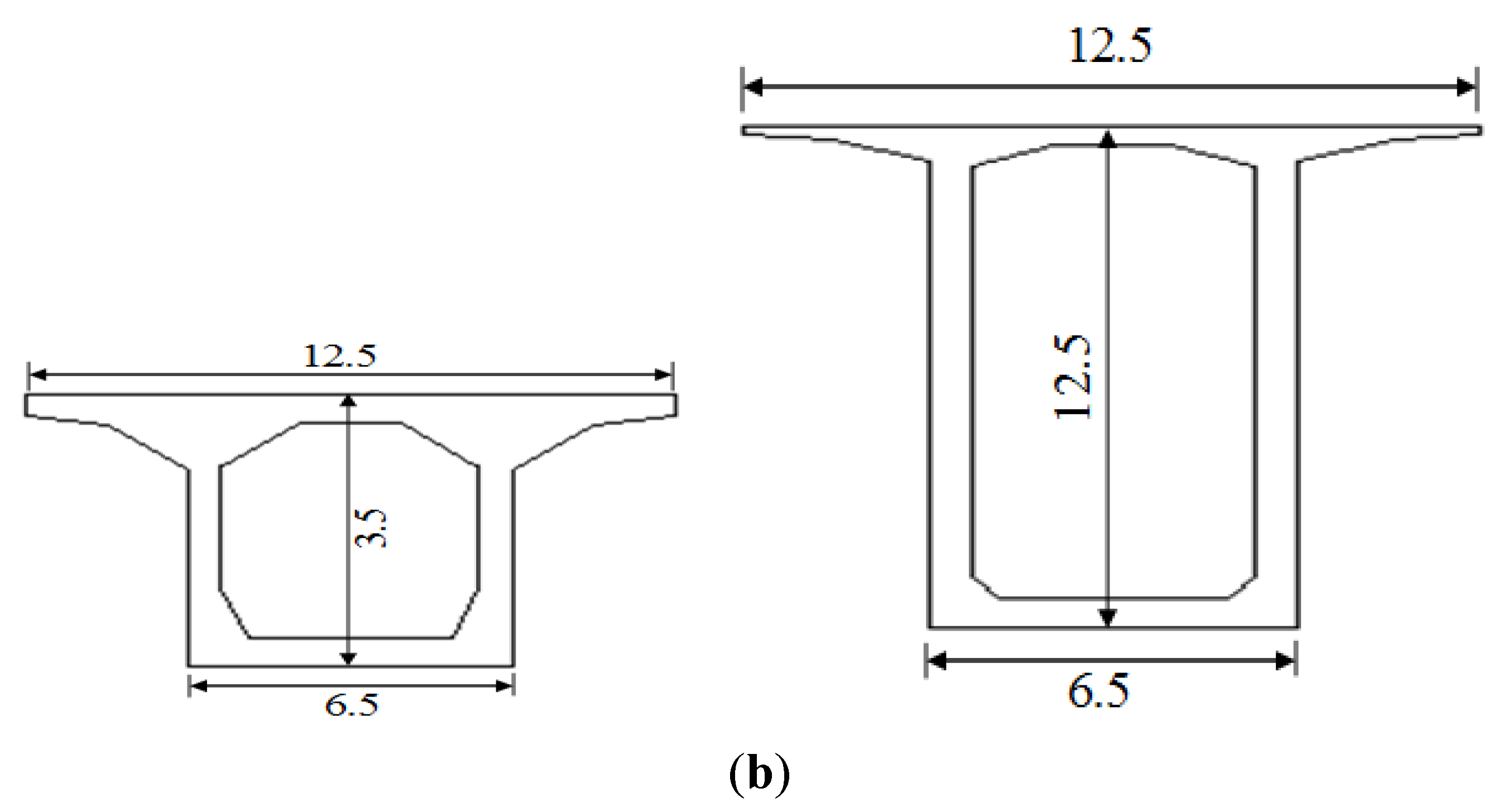
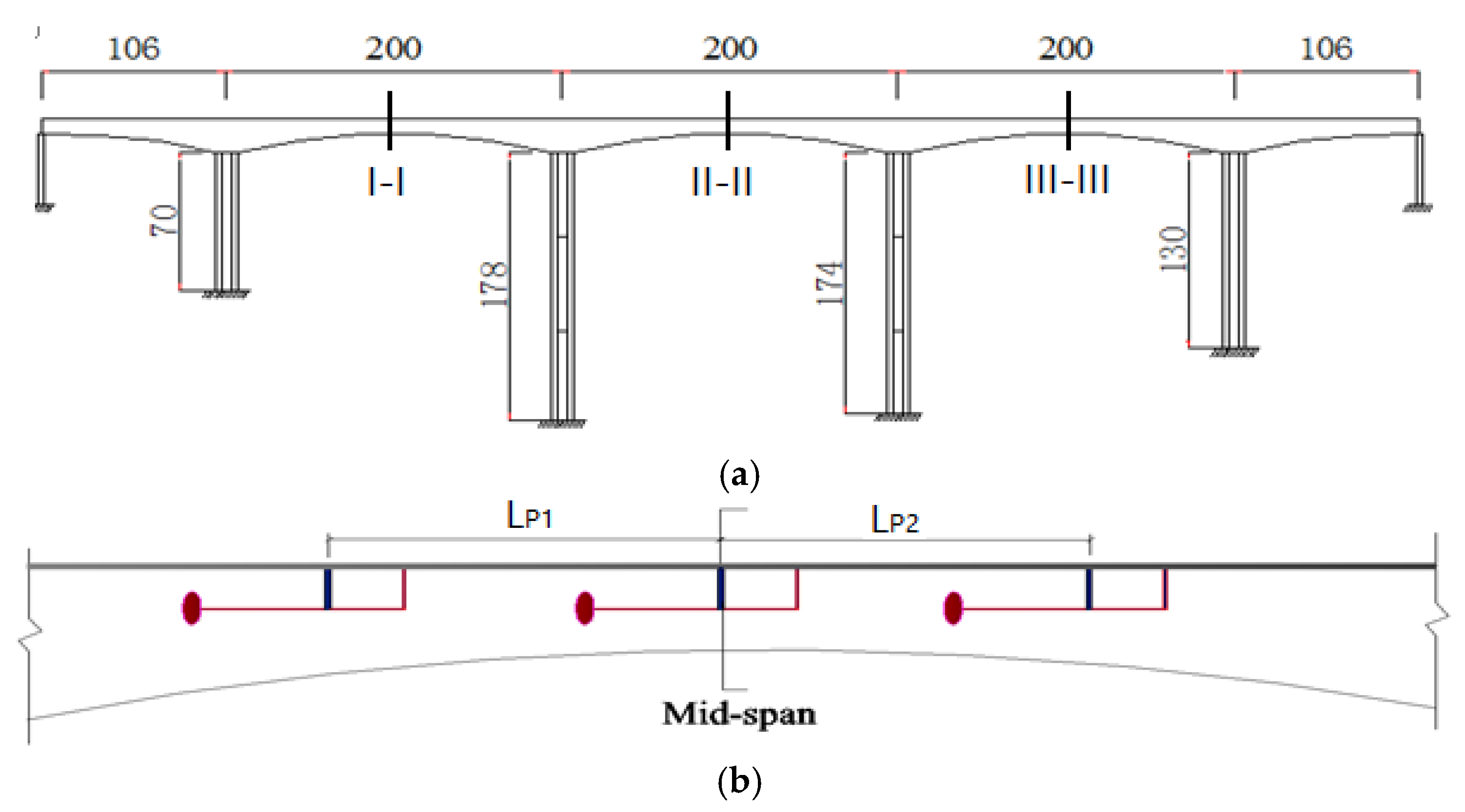
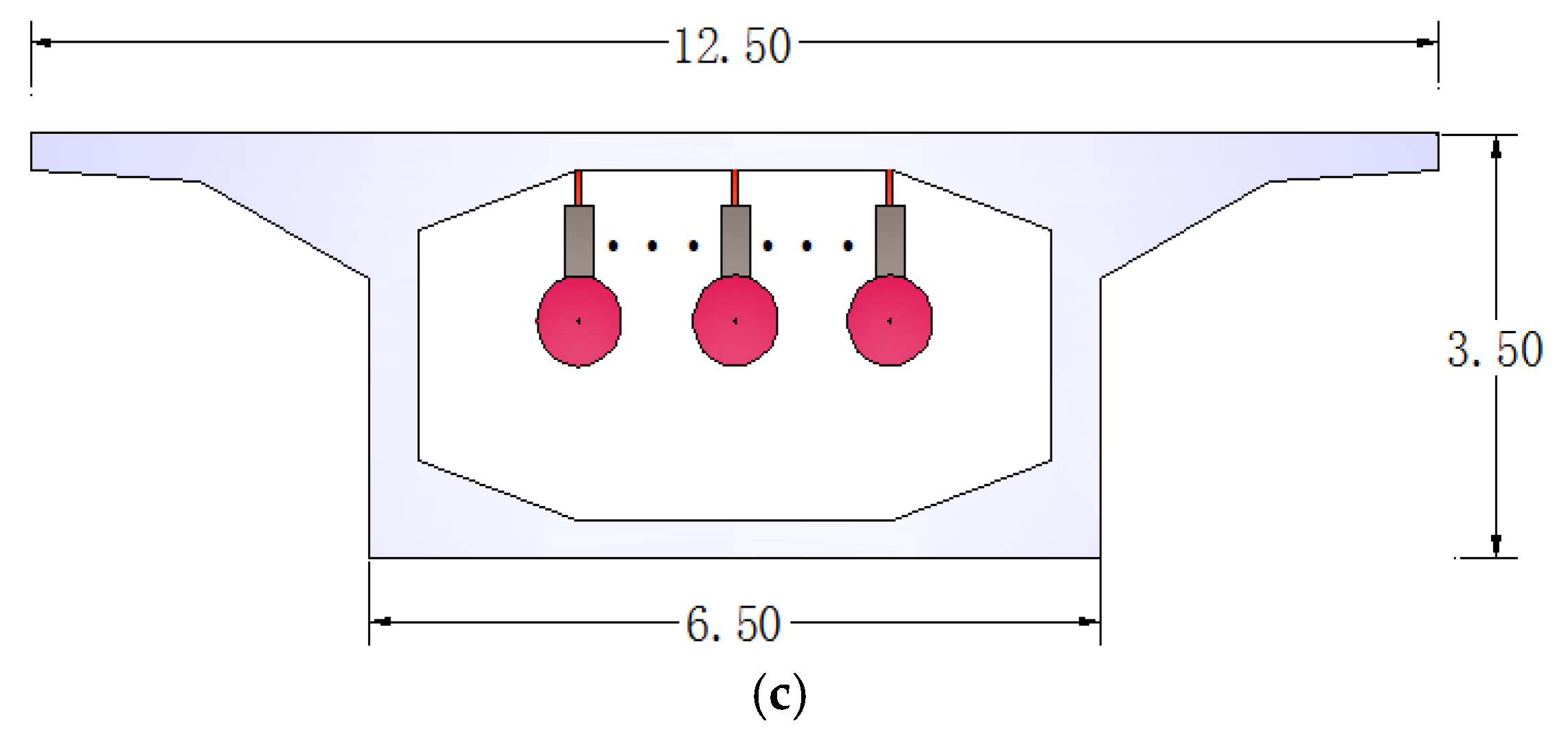
Figure 6.
Elevation of the bridge and the cross-section of the beam. (a) Elevation of the high-pier bridge (m). (b) Cross-section of the beam (m).
Figure 6.
Elevation of the bridge and the cross-section of the beam. (a) Elevation of the high-pier bridge (m). (b) Cross-section of the beam (m).
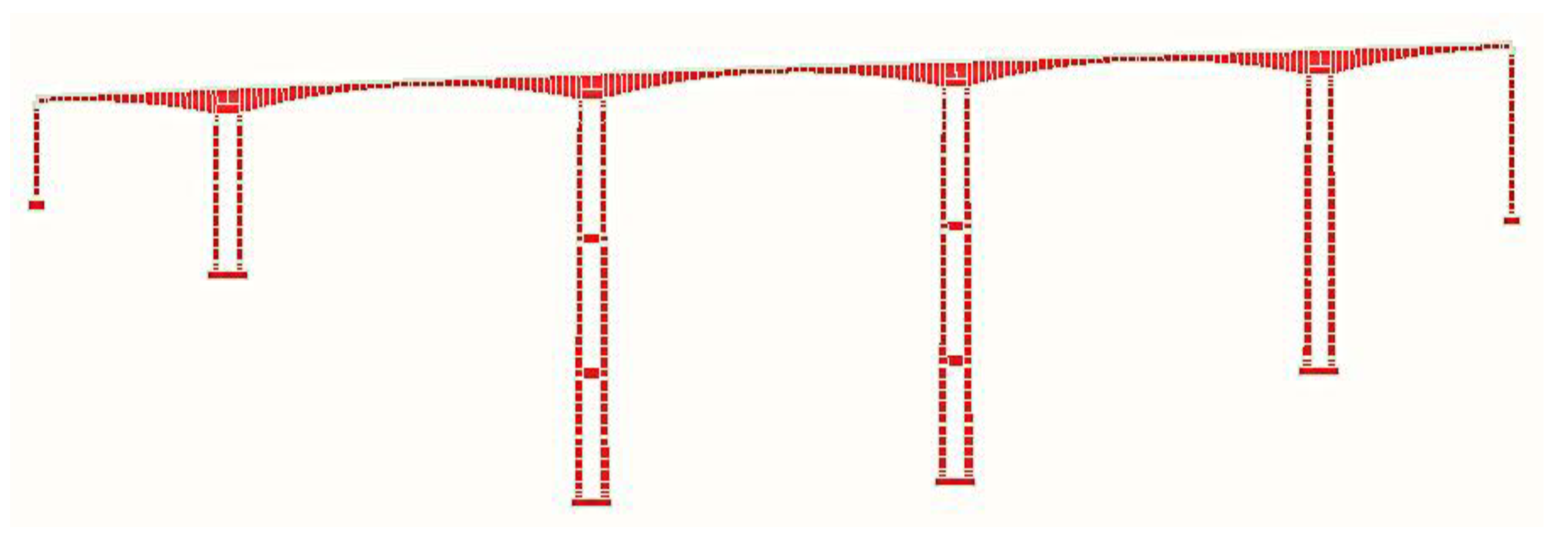
Figure 7.
FE model of the Longtan Bridge.
Figure 7.
FE model of the Longtan Bridge.
Figure 8.
Locations of the MPTMD at the bridge. (a) Locations of the MPTMD at each span (m). (b) Longitudinal locations of the MPTMD at each mid-span (I-I; II-II; III-III) (m). (c) Lateral locations of the MPTMD at each mid-span (I-I; II-II; III-III) (m).
Figure 8.
Locations of the MPTMD at the bridge. (a) Locations of the MPTMD at each span (m). (b) Longitudinal locations of the MPTMD at each mid-span (I-I; II-II; III-III) (m). (c) Lateral locations of the MPTMD at each mid-span (I-I; II-II; III-III) (m).
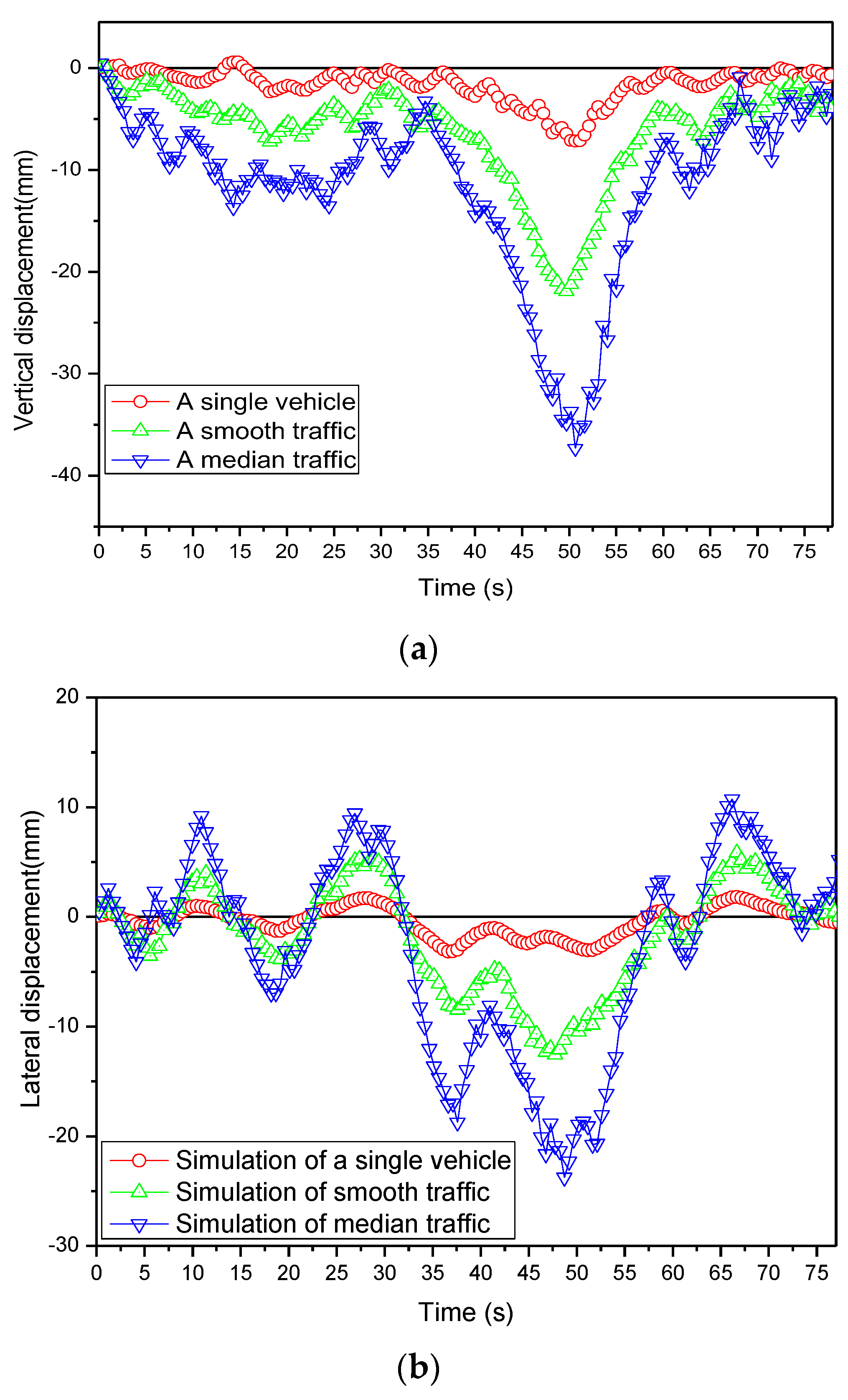
Figure 9.
Comparison of simulated solutions of the mid-span displacement. (a) Vertical displacement. (b) Lateral displacement.
Figure 9.
Comparison of simulated solutions of the mid-span displacement. (a) Vertical displacement. (b) Lateral displacement.
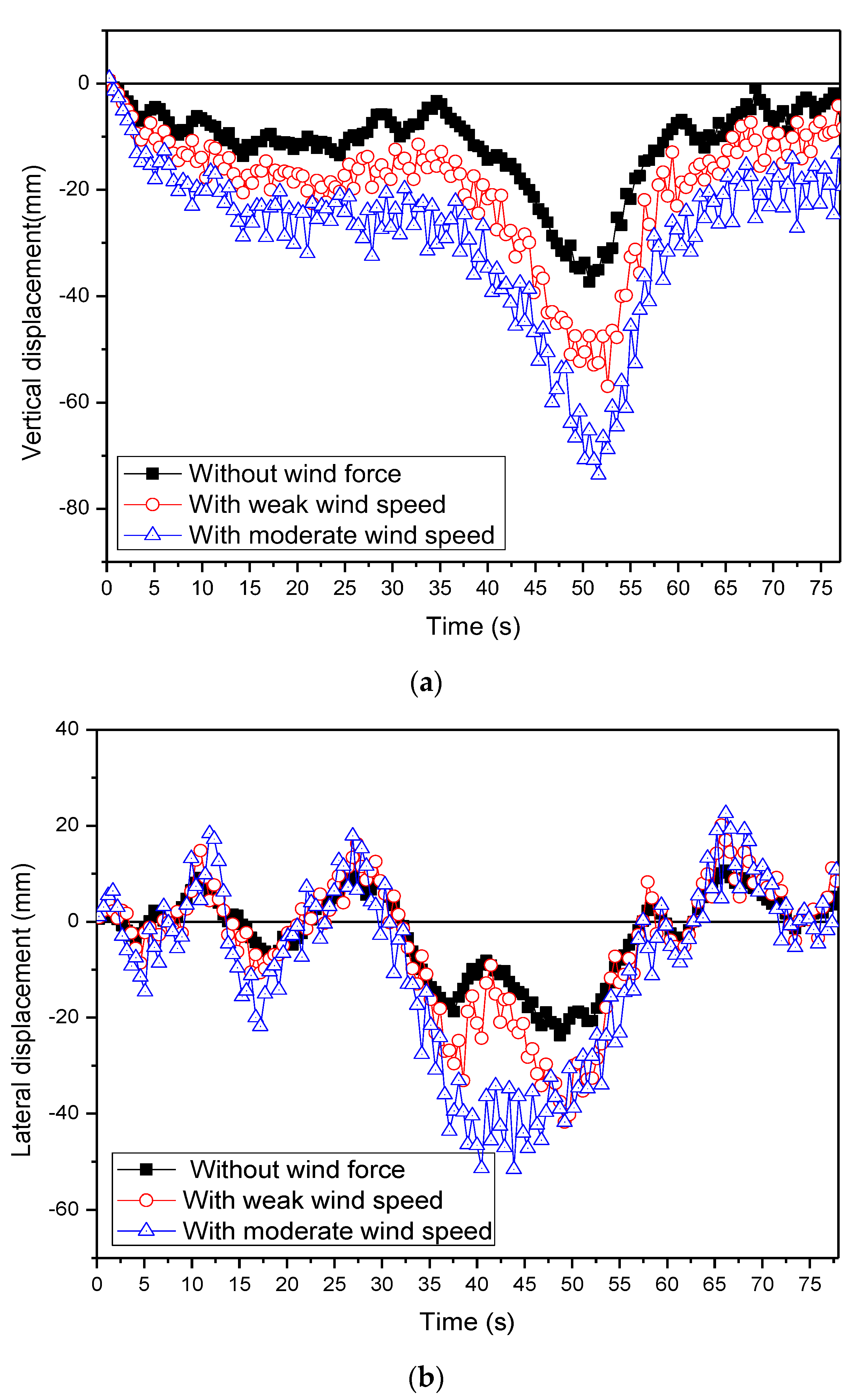
Figure 10.
Comparison of simulated solutions of the mid-span displacement. (a) Vertical displacement (b) Lateral displacement.
Figure 10.
Comparison of simulated solutions of the mid-span displacement. (a) Vertical displacement (b) Lateral displacement.
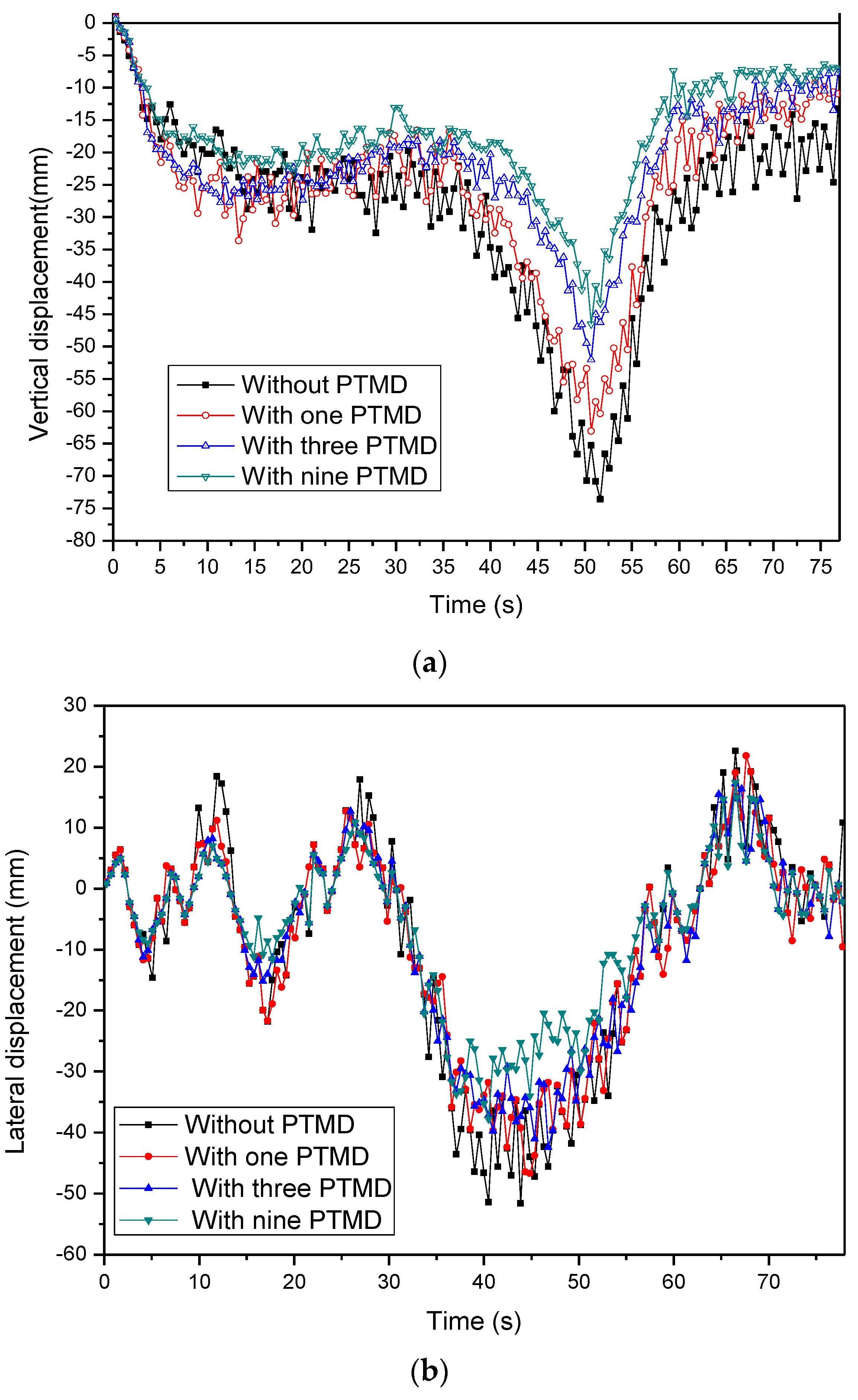
Figure 11.
Comparison of the mid-span displacements with/without MPTMDs. (a) Vertical displacement. (b) Lateral displacement.
Figure 11.
Comparison of the mid-span displacements with/without MPTMDs. (a) Vertical displacement. (b) Lateral displacement.
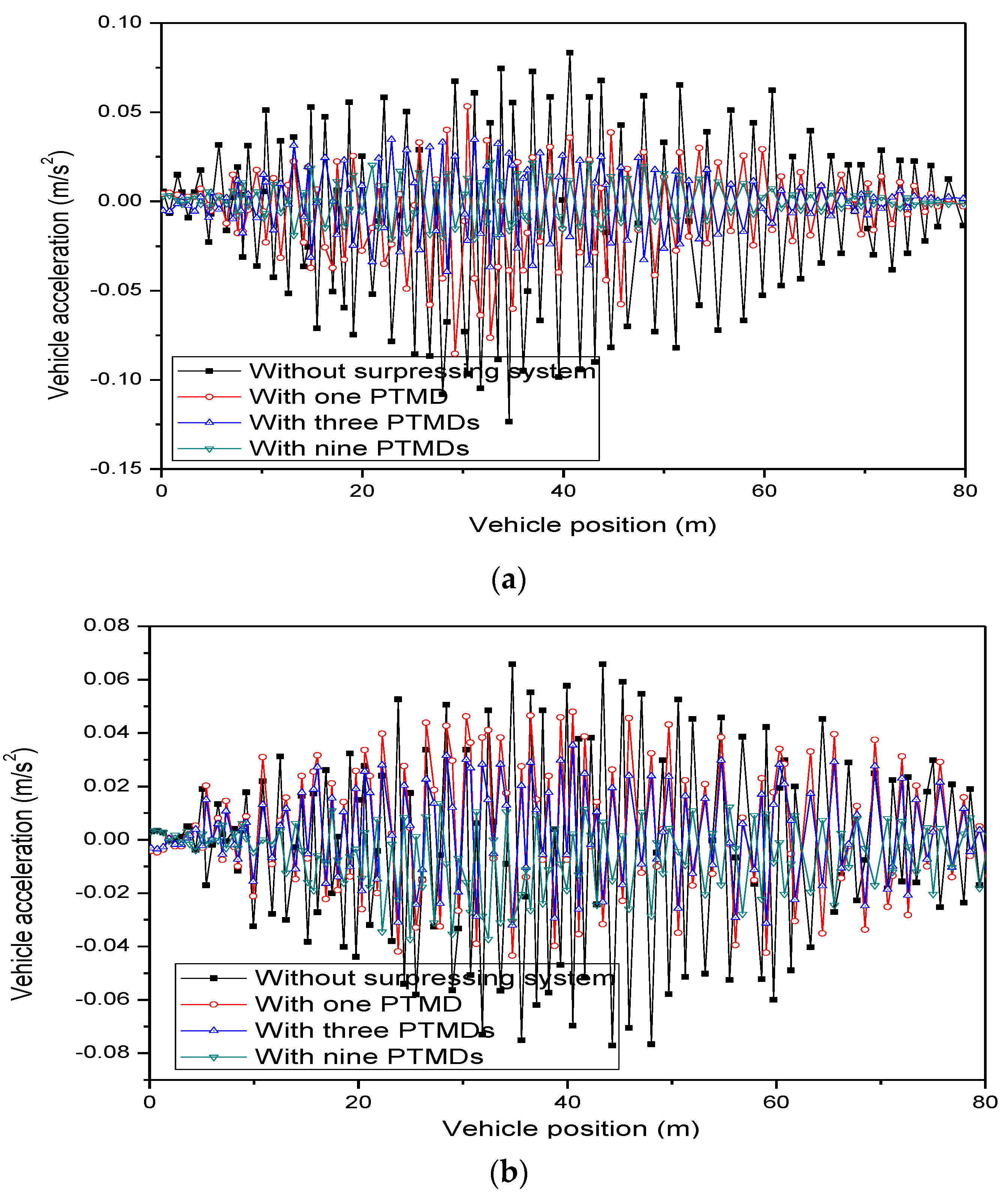
Figure 12.
Comparison of the vehicle accelerations with/without MPTMDs. (a) Vertical accelerations. (b) Lateral accelerations.
Figure 12.
Comparison of the vehicle accelerations with/without MPTMDs. (a) Vertical accelerations. (b) Lateral accelerations.
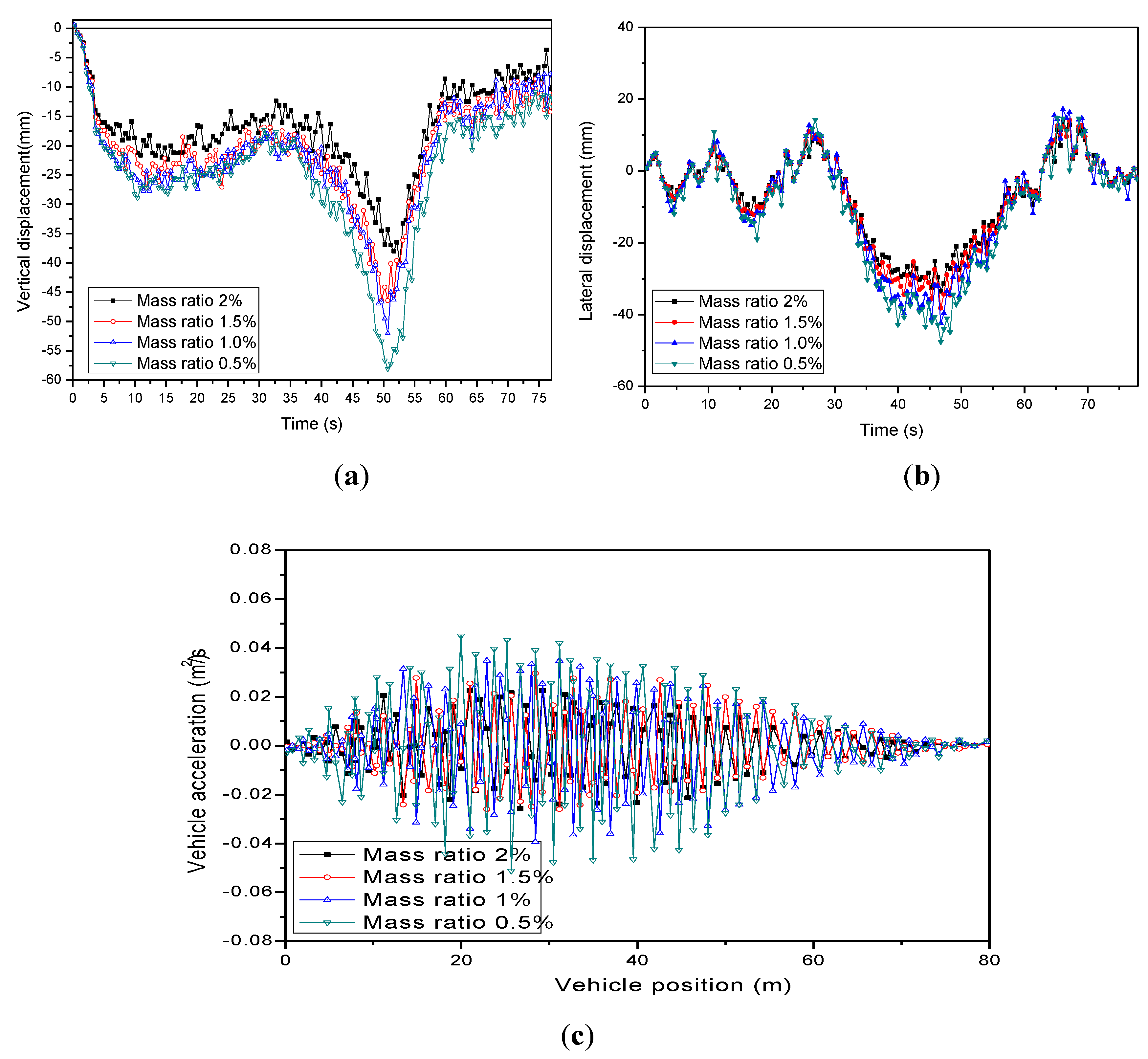
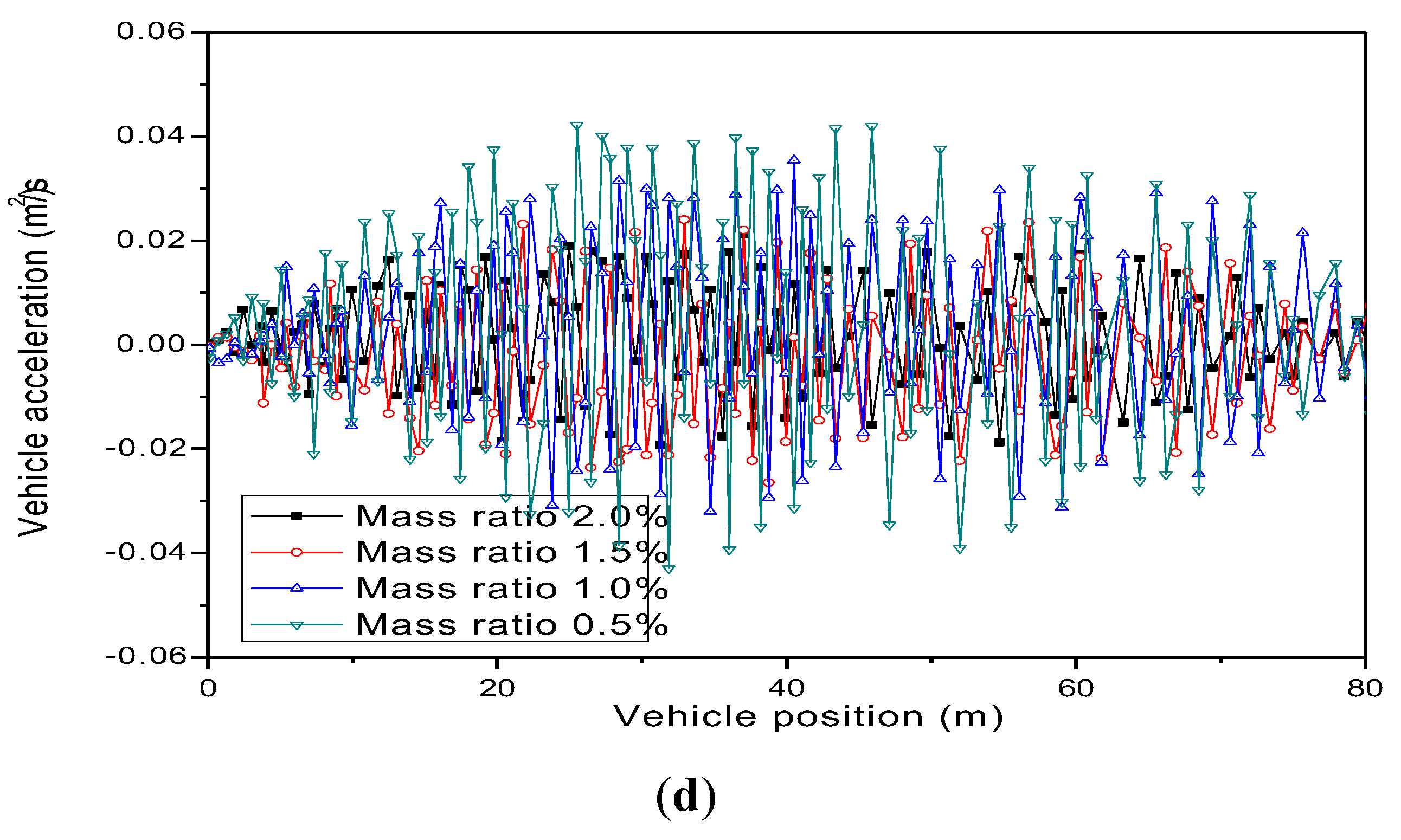
Figure 13.
Parameters study of mass ratio on vehicle-bridge coupled vibration. (a) Vertical displacement. (b) Lateral displacement. (c) Vertical accelerations. (d) Lateral accelerations.
Figure 13.
Parameters study of mass ratio on vehicle-bridge coupled vibration. (a) Vertical displacement. (b) Lateral displacement. (c) Vertical accelerations. (d) Lateral accelerations.
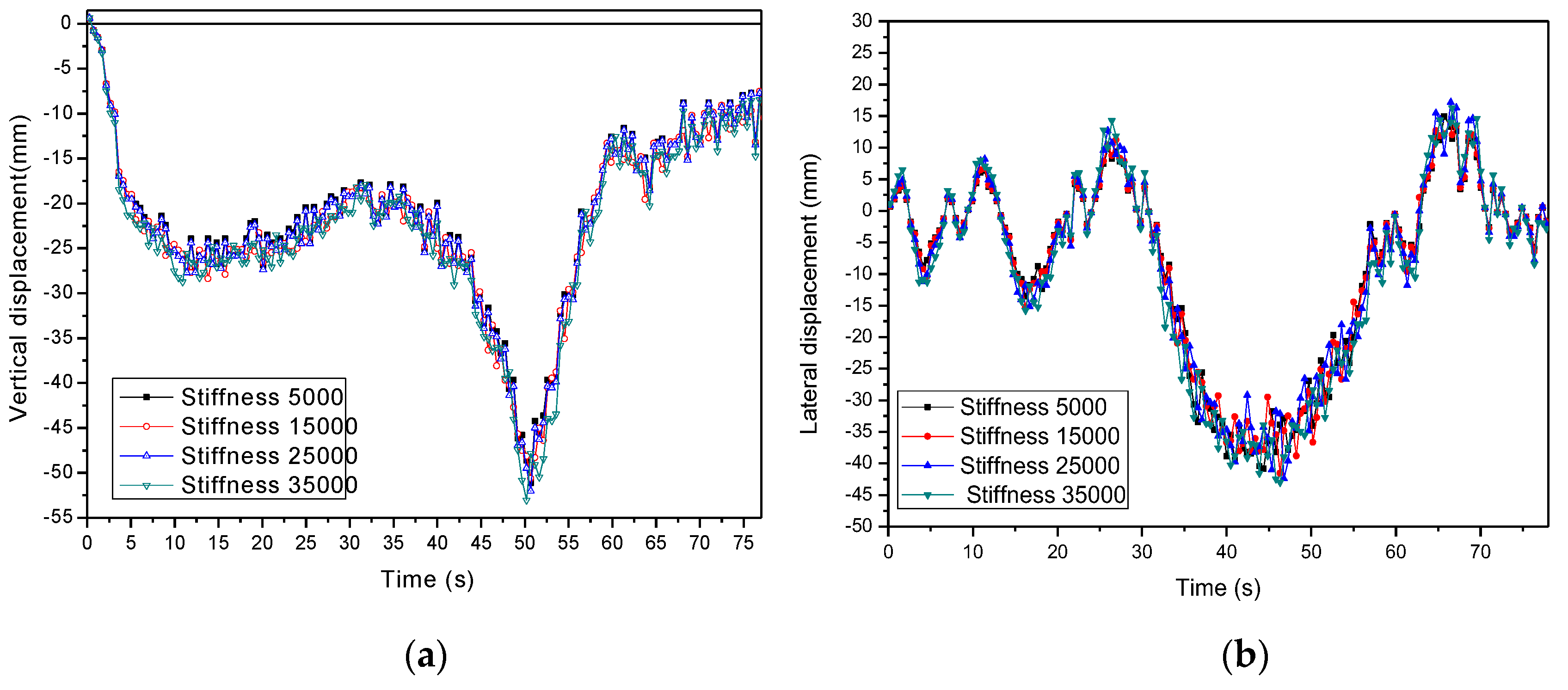
Figure 14.
Parameters study of pounding stiffness on bridge displacements. (a) Vertical displacement. (b) Lateral displacement.
Figure 14.
Parameters study of pounding stiffness on bridge displacements. (a) Vertical displacement. (b) Lateral displacement.
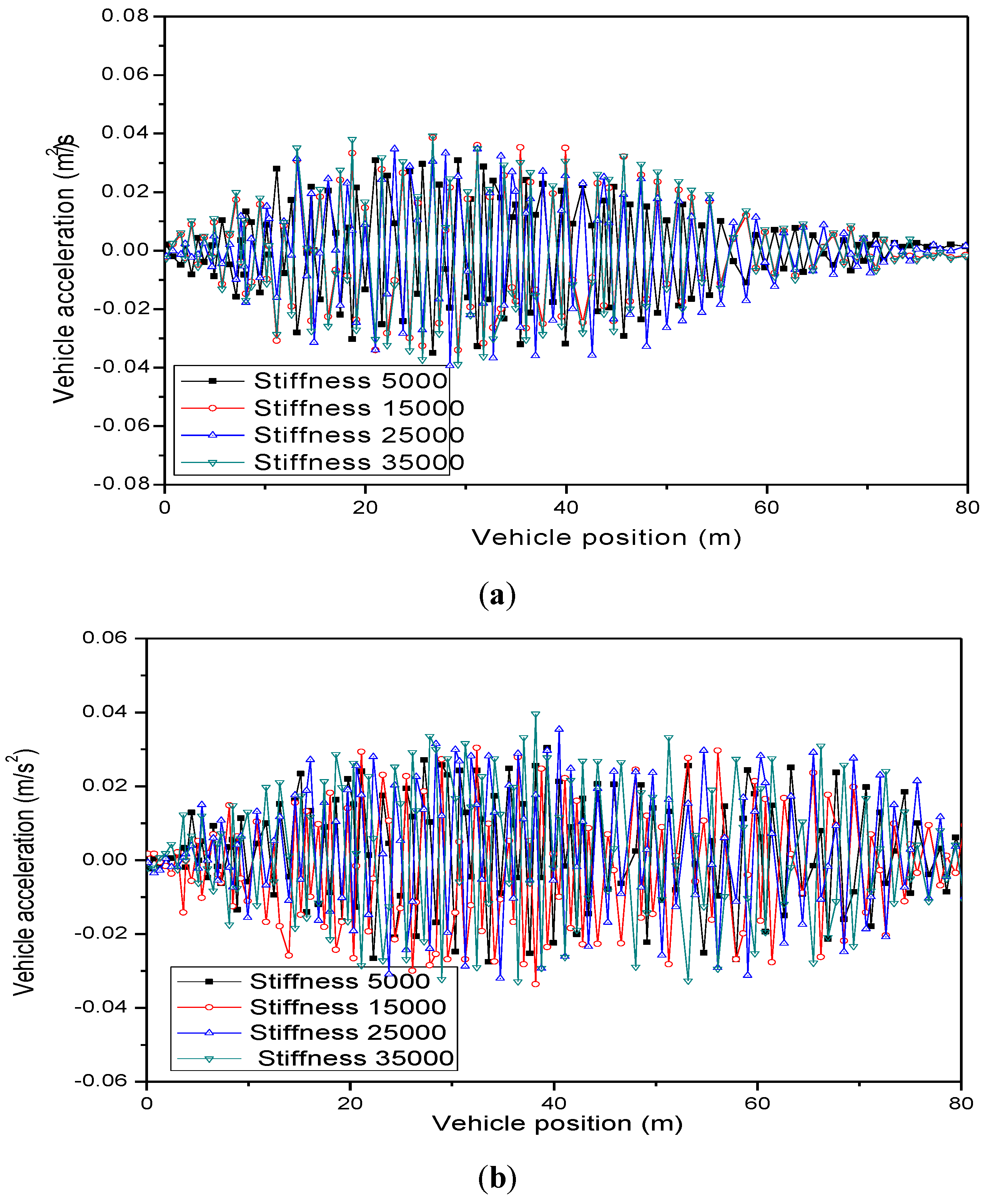
Figure 15.
Parameters study of pounding stiffness on vehicle accelerations. (a) Vertical accelerations. (b) Lateral accelerations.
Figure 15.
Parameters study of pounding stiffness on vehicle accelerations. (a) Vertical accelerations. (b) Lateral accelerations.
Table 1.
Ride comfort standard specified in ISO2631-1.
Table 1.
Ride comfort standard specified in ISO2631-1.
| Comfort or Discomfort |
|---|
| Less than 0.315 m/s2 | Not uncomfortable |
| 0.315 m/s2 to 0.63 m/s2 | A little uncomfortable |
| 0.5 m/s2 to 1 m/s2 | Fairly uncomfortable |
| 0.8 m/s2 to 1.6 m/s2 | Uncomfortable |
| 1.25 m/s2 to 2.5 m/s2 | Very uncomfortable |
| Greater than 2 m/s2 | Extremely uncomfortable |
Table 2.
Parameters of the 3-D vehicle.
Table 2.
Parameters of the 3-D vehicle.
| Parameters | Unit |
|---|
| Mass of truck body mt | 26,745 kg |
| Pitching moment of inertia of truck body Izt | 162,650 kg.m2 |
| Rolling moment of inertia of truck body Ixt | 67,656 kg.m2 |
| Mass of truck front axle ma1 | 1513 kg |
| Rolling moment of inertia of front axle Ixa1 | 2360 kg.m2 |
| Mass of truck rear axle ma2 | 2674 kg |
| Rolling moment of inertia of rear axle Ixa2 | 2360 kg.m2 |
| Suspension spring stiffness of the first axle Ksy1, Ksy2 | 252,604 (N/m) |
| Suspension damper coefficient of the first axle Dsy1, Dsy2 | 2490 (N.s/m) |
| Suspension spring stiffness of the second axle Ksy3, Ksy4 | 1,806,172 (N/m) |
| Suspension damper coefficient of the second axle Dsy3, Dsy4 | 7982 (N.s/m) |
| Radial direction spring stiffness of the tire kty | 276,770 (N/m) |
| Radial direction spring damper coefficient of the tire cty | 1990 (N.s/m) |
| Length of the patch contact | 345 mm |
| Width of the patch contact | 240 mm |
| Distance between the front and rear axles l1 | 4.85 m |
| Distance between the front and the center of the truck l2 | 3.73 m |
| Distance between the rear axle and the center of the truck l3 | 1.12 m |
| Distance between the right and left axles s1,s2 | 2.40 m |
Table 3.
The parameters of the quarter vehicle model.
Table 3.
The parameters of the quarter vehicle model.
| Parameters | Unit | Sedan Car | Light Truck |
|---|
| Sprung mass | kg | 1611 | 4870 |
Stiffness of suspension system
(Ksx1, Ksy1, Ksz1) | N/m | 434,920 | 500,000 |
| Damping (Csx1, Csy1, Csz1) | N.s/m | 5820 | 20,000 |
Table 4.
Statistical property of traffic flow on bridge.
Table 4.
Statistical property of traffic flow on bridge.
| Occupancy | Average Speed (km/h) | Standard Deviation (km/h) |
|---|
| 0.07 | 94.31 | 15.58 |
| 0.15 | 85.56 | 24.42 |
| 0.30 | 50.32 | 39.76 |
Table 5.
Multiple tuned mass damper parameters.
Table 5.
Multiple tuned mass damper parameters.
| Longitudinal Locations of PTMDs, n | (II-II) | (I-I; II-II; III-III) | (I-I; II-II; III-III) | (I-I; II-II; III-III) |
|---|
| Number of PTMDs, n | 1 | 3 (One PTMD of each section) | 6 (Two PTMDs of each section) | 9 (Three PTMDs of each section) |
| Optimal frequency ratio | 1.0 | 0.95;1.0;1.1 | 0.90;0.95;1.0;
1.05;1.1;1.15 | 0.85;0.88;0.90;0.95;1.0
1.05;1.10;1.15;1.20 |
Table 6.
Maximum response of bridges with and without PTMD systems.
Table 6.
Maximum response of bridges with and without PTMD systems.
| MTMD Condition | Dynamic Responses |
|---|
| Vertical Deflection (mm) | Reduction Ratio | Lateral Deflection(mm) | Reduction Ratio |
|---|
| Without PTMD | 73.59 | | 51.60 | |
| Single PTMD | 63.08 | (14.28%) | 46.71 | (9.48%) |
| MPTMD(3) | 52.02 | (29.31%) | 42.43 | (17.77%) |
| MPTMD(6) | 49.32 | (32.98%) | 39.42 | (23.60%) |
| MPTMD(9) | 46.52 | (36.78%) | 37.78 | (26.78%) |
Table 7.
Ride comfort of vehicles with average roughness.
Table 7.
Ride comfort of vehicles with average roughness.
| MTMD Condition | Dynamic Responses |
|---|
| asu (m/s2) | Comfort or Discomfort |
|---|
| Without PTMD | 1.04 | Uncomfortable |
| Single PTMD | 0.63 | Fairly uncomfortable |
| MPTMD(3) | 0.43 | A little uncomfortable |
| MPTMD(6) | 0.37 | A little uncomfortable |
| MPTMD(9) | 0.31 | Not uncomfortable |
Table 8.
Maximum response of bridges with and without PTMD systems.
Table 8.
Maximum response of bridges with and without PTMD systems.
| MTMD Condition | Dynamic Responses |
|---|
| Vertical Deflection (mm) | Reduction Ratio | Lateral Deflection(mm) | Reduction Ratio |
|---|
| Mass ratio 2.0% | 40.13 | (45.47%) | 33.56 | (37.98%) |
| Mass ratio 1.5% | 46.41 | (36.93%) | 38.20 | (25.71%) |
| Mass ratio 1.0% | 52.02 | (29.31%) | 42.43 | (21.59%) |
| Mass ratio 0.5% | 58.07 | (21.09%) | 47.59 | (12.05%) |
Table 9.
Ride comfort of vehicles with average roughness.
Table 9.
Ride comfort of vehicles with average roughness.
| MTMD Condition | Dynamic Responses |
|---|
| asu (m/s2) | Comfort or Discomfort |
|---|
| Mass ratio 2.0% | 0.27 | Not uncomfortable |
| Mass ratio 1.5% | 0.32 | A little uncomfortable |
| Mass ratio 1.0% | 0.43 | Fairly uncomfortable |
| Mass ratio 0.5% | 0.56 | Uncomfortable |
Table 10.
Maximum response of bridges with and without PTMD systems.
Table 10.
Maximum response of bridges with and without PTMD systems.
Stiffness Condition
| Dynamic Responses |
|---|
| Vertical Deflection (mm) | Reduction Ratio | Lateral Deflection (mm) | Reduction Ratio |
|---|
| Stiffness 5000 | 50.62 | (31.21%) | 40.83 | (24.54%) |
| Stiffness 15,000 | 51.12 | (30.53%) | 41.56 | (23.19%) |
| Stiffness 25,000 | 52.02 | (29.31%) | 42.43 | (21.59%) |
| Stiffness 35,000 | 53.03 | (27.94%) | 42.98 | (20.57%) |
Table 11.
Ride comfort of vehicles with average roughness.
Table 11.
Ride comfort of vehicles with average roughness.
Stiffness Condition
| Dynamic Responses |
|---|
| asu (m/s2) | Comfort or Discomfort |
|---|
| Stiffness 5000 | 0.38 | A little uncomfortable |
| Stiffness 15,000 | 0.41 | A little uncomfortable |
| Stiffness 25,000 | 0.43 | A little uncomfortable |
| Stiffness 35,000 | 0.46 | A little uncomfortable |




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}