Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review



Abstract
:1. Introduction
2. Principle of FMCW Radar
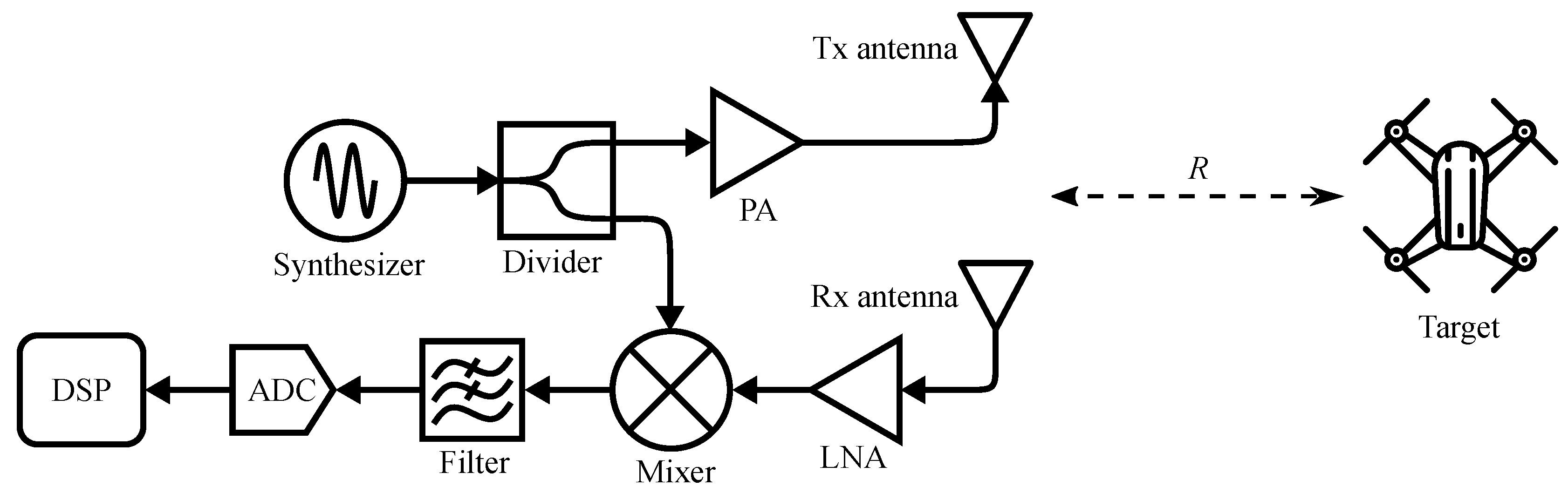
2.1. FMCW Radar Transceiver
2.2. Antenna Array and Beamforming
2.3. FMCW Radar Signal Processing
3. Recent Advancements
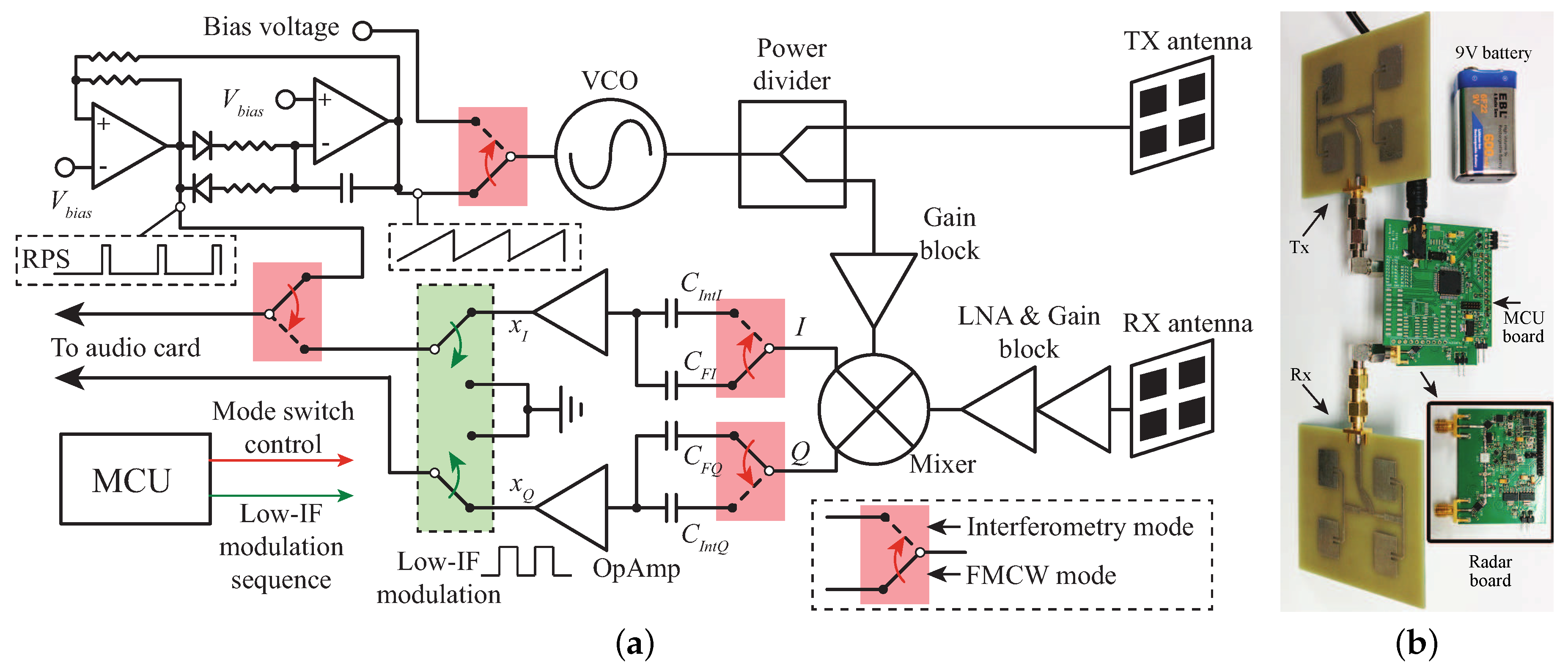
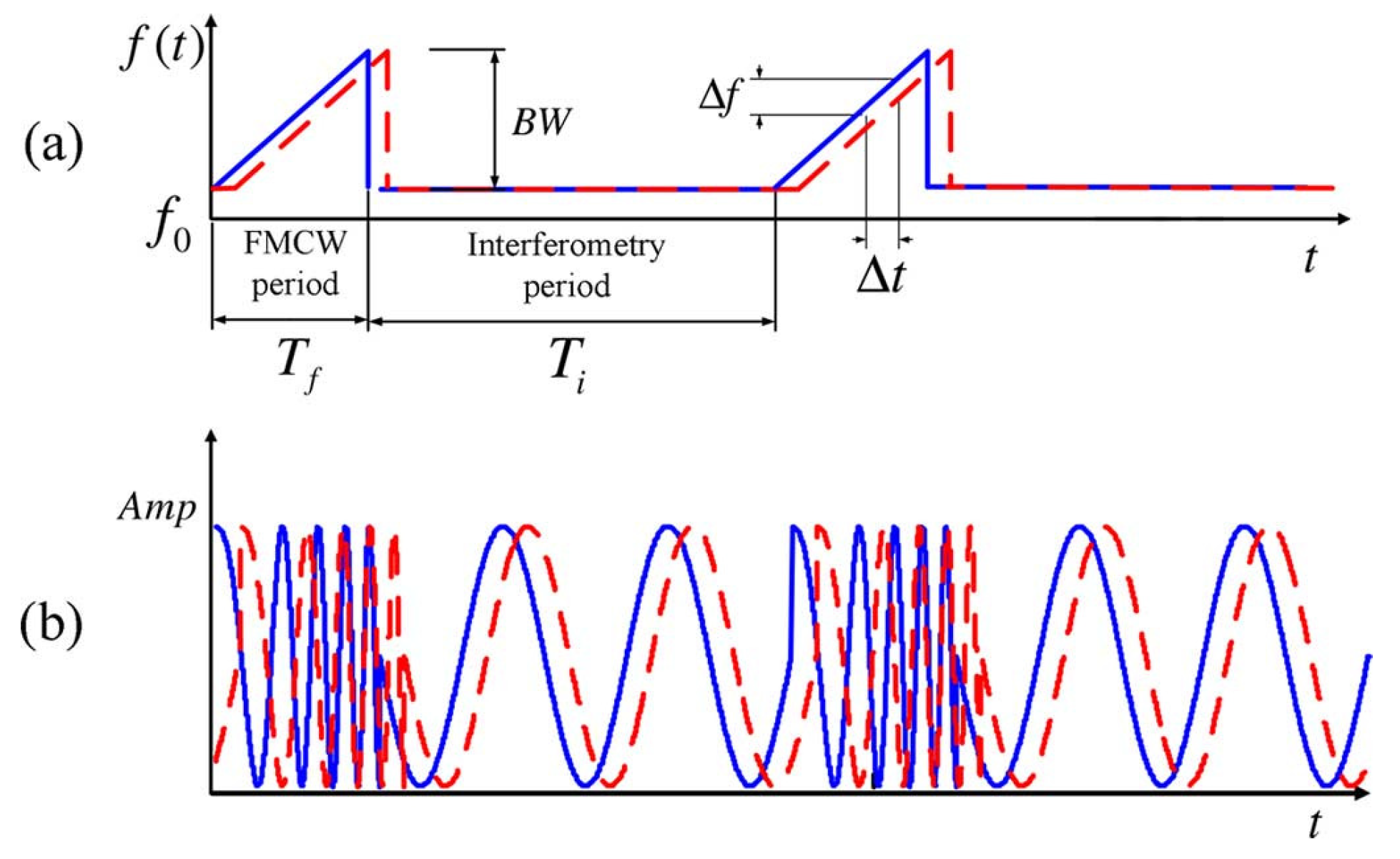
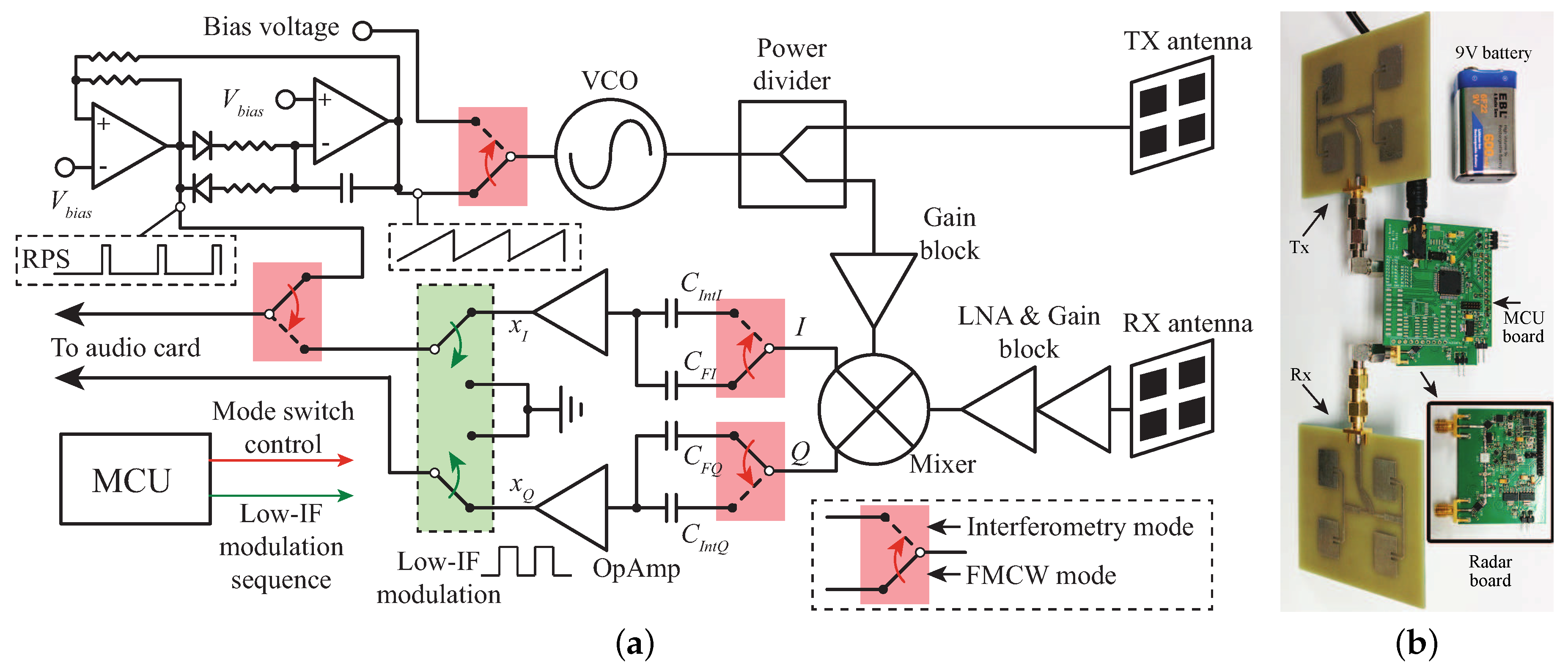
3.1. Hybrid Radar
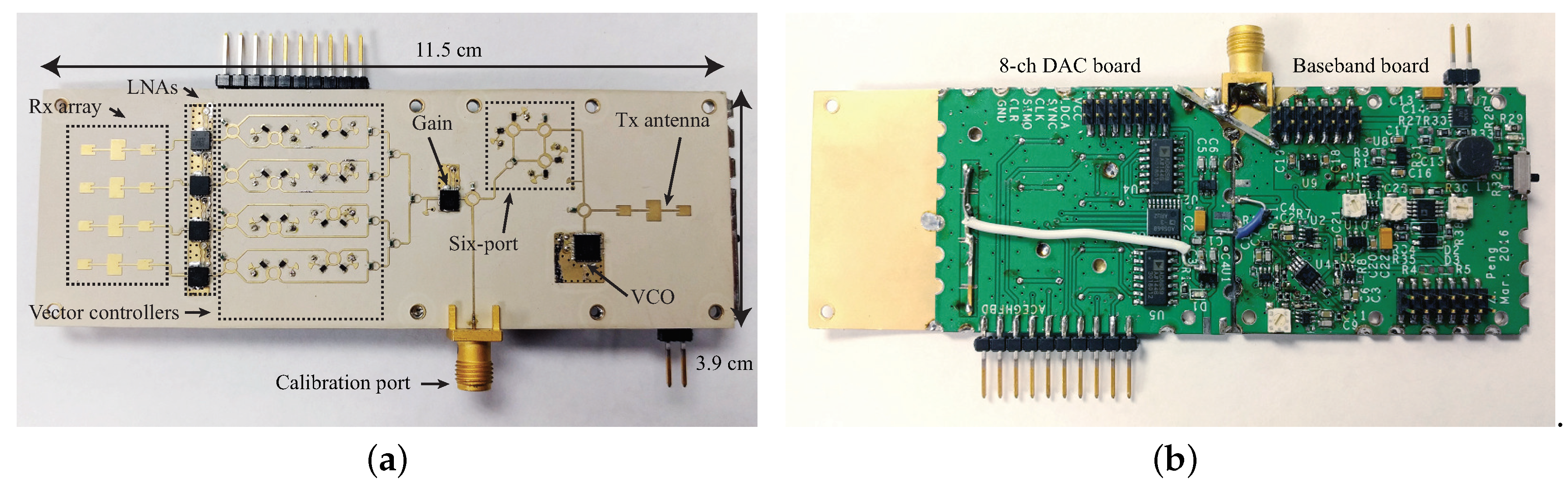
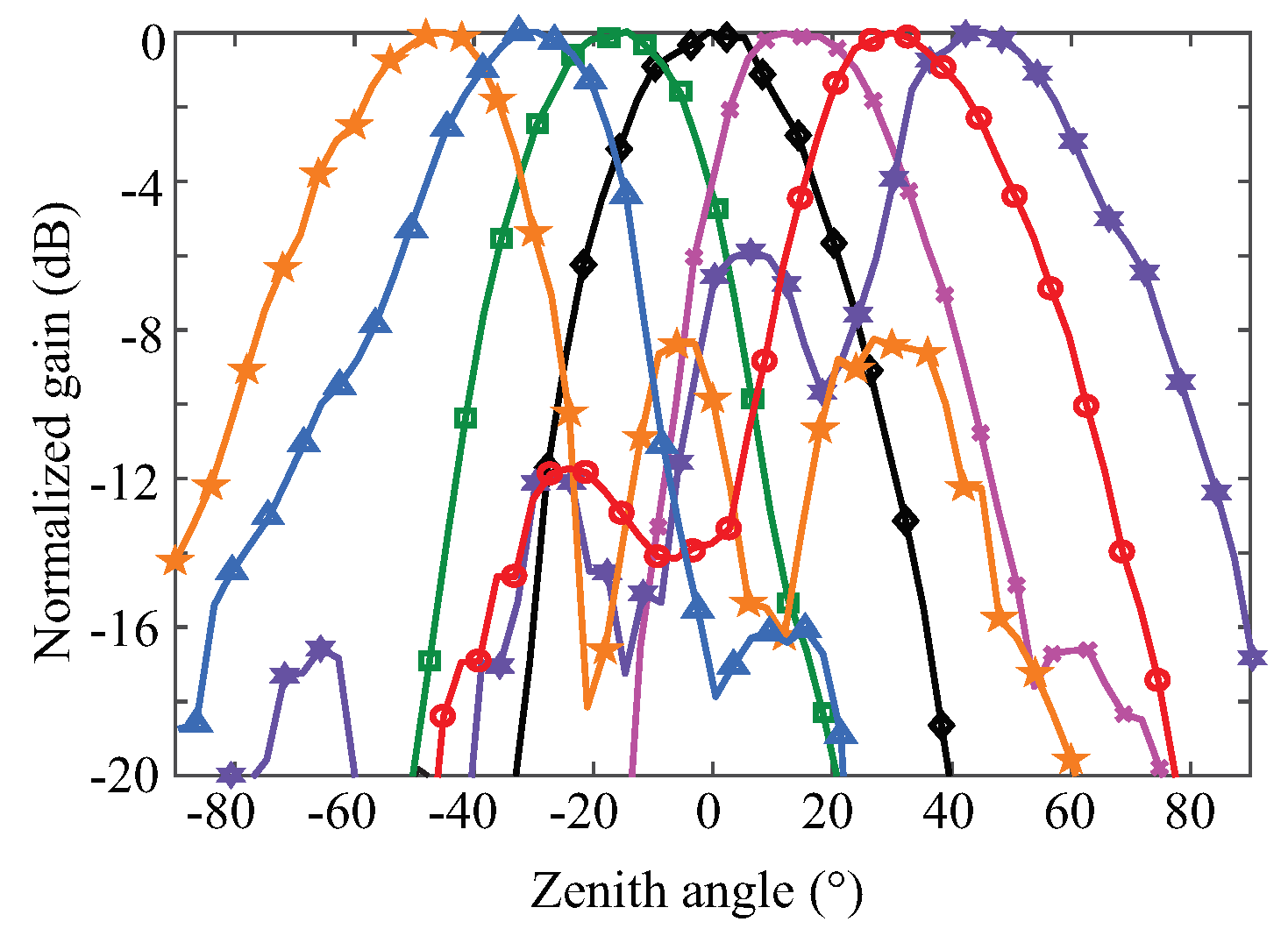
3.2. Portable Radar with RF Beamforming
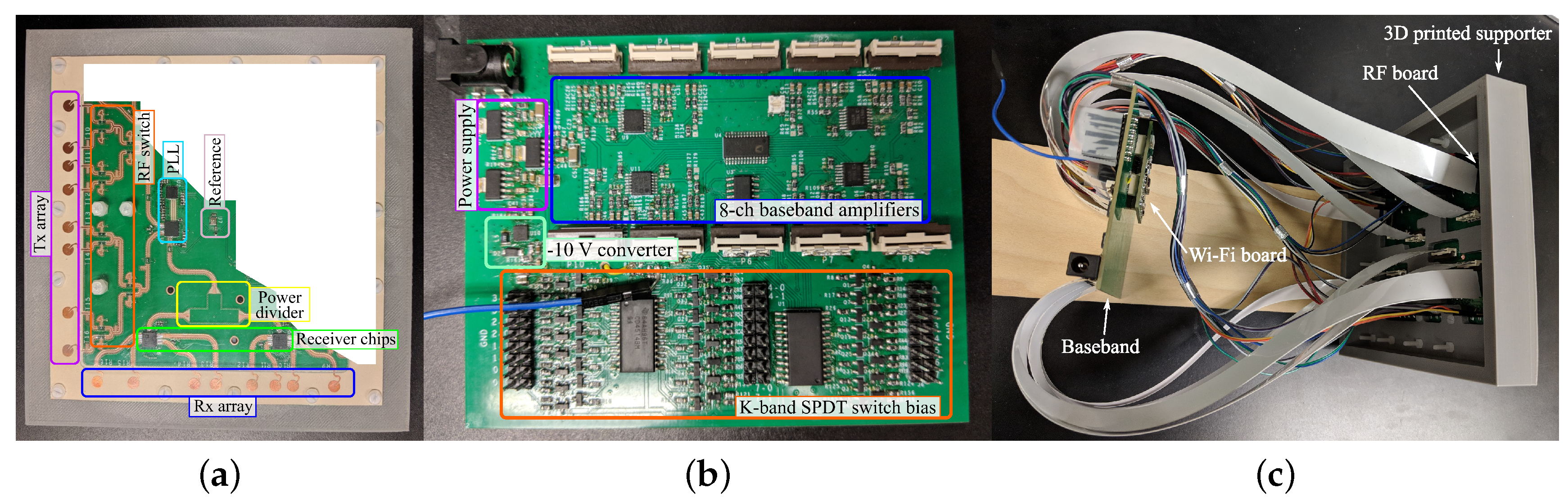
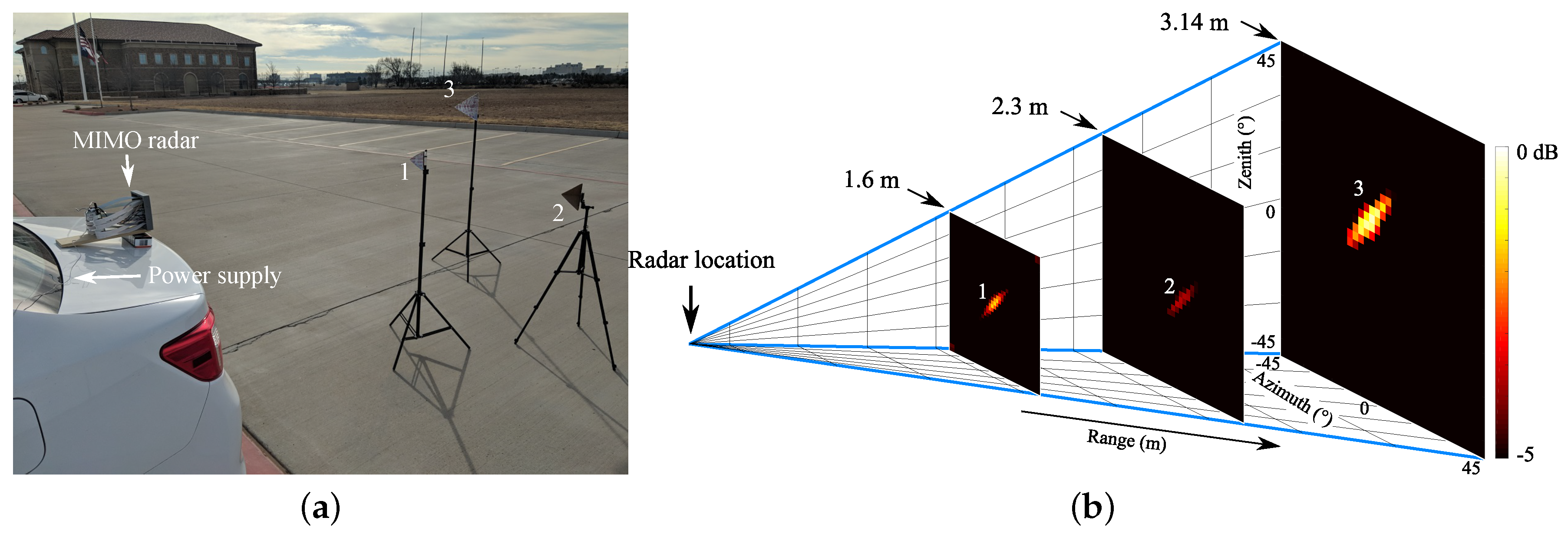
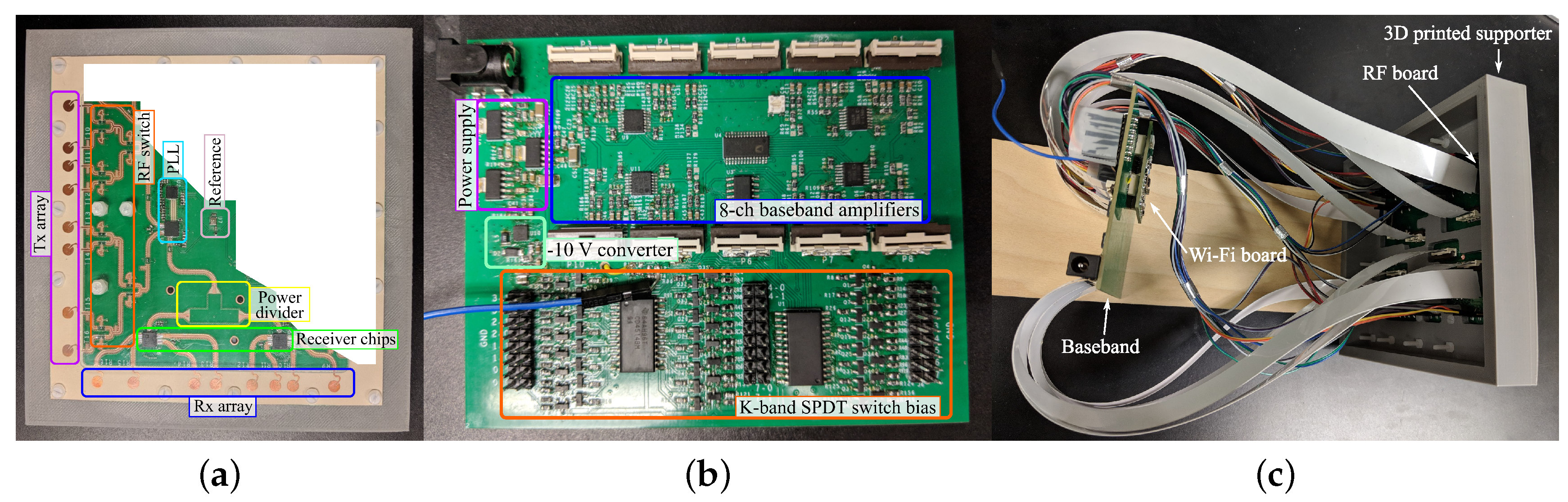
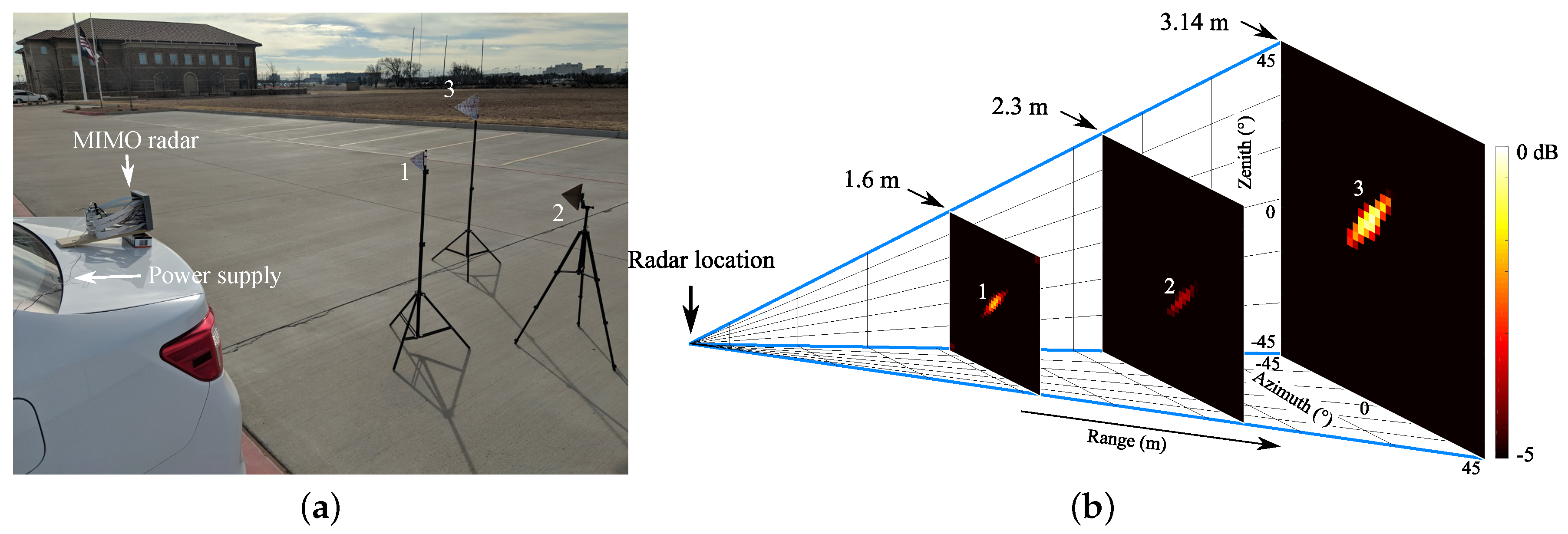
3.3. Sparse Array and MIMO
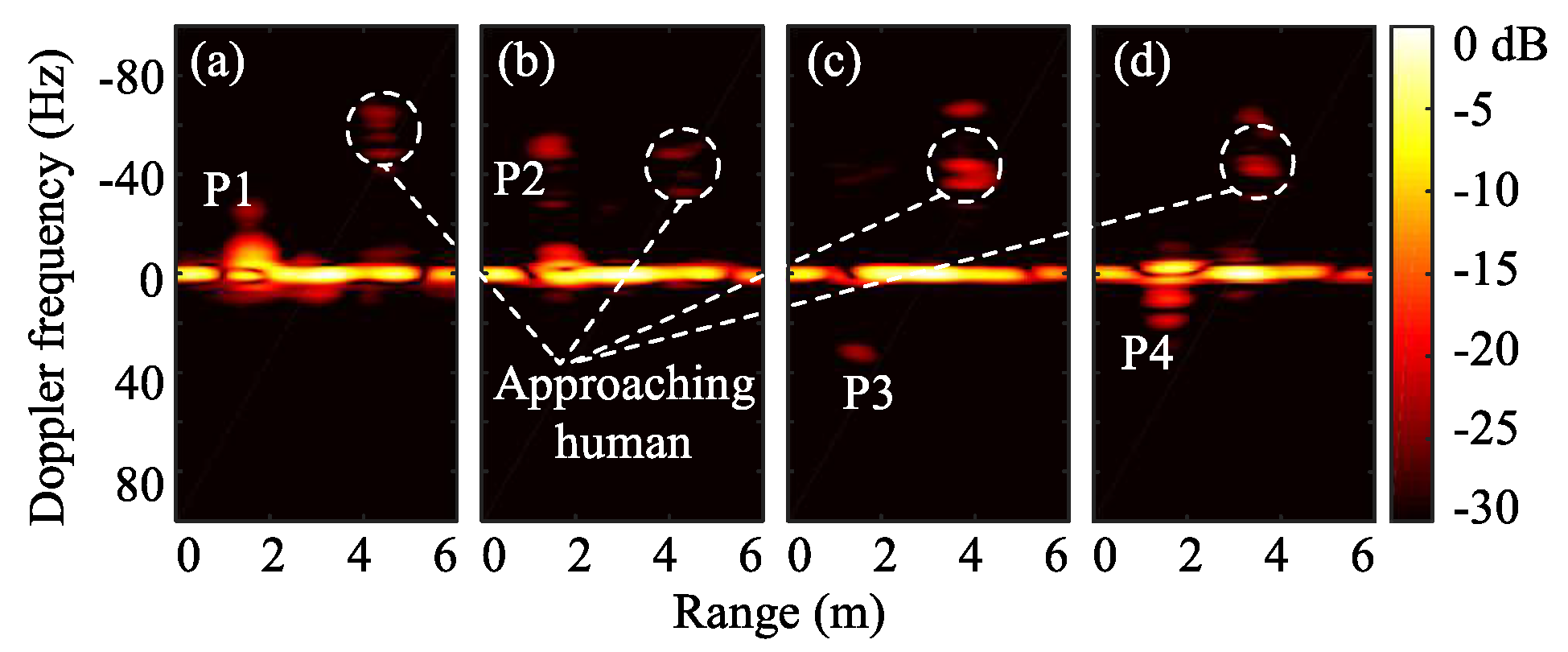
3.4. Life Tracking with Vital-Doppler
4. Emerging Applications
4.1. Gesture Recognition
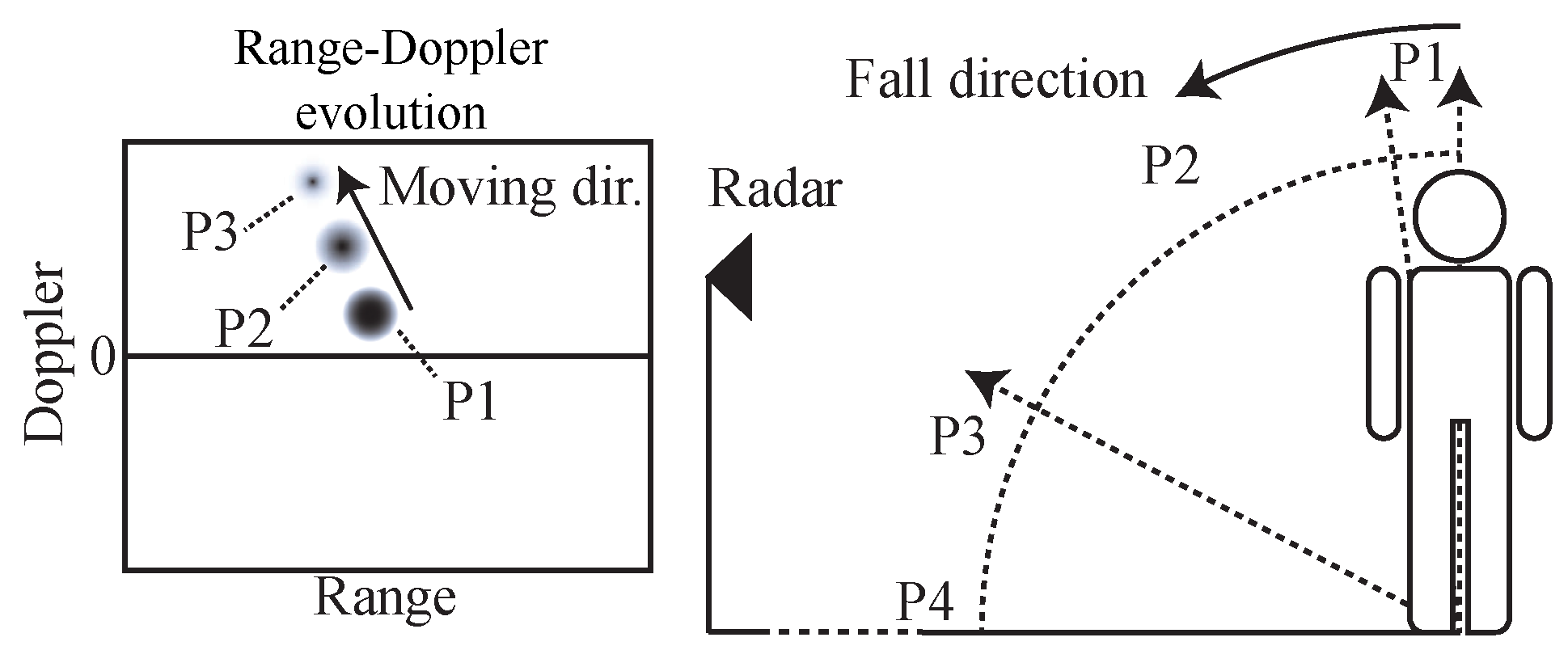
4.2. Fall Detection
4.3. Human Activity Categorizing
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Watson-Watt, R. Radar in war and in peace. Nature 1945, 156, 319–324. [Google Scholar] [CrossRef]
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.M.; Lin, J.; Kovacs, G.T. Range correlation and I/Q performance benefits in single-chip silicon Doppler radars for noncontact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- Li, C.; Yu, X.; Lee, C.M.; Li, D.; Ran, L.; Lin, J. High-sensitivity software-configurable 5.8-GHz radar sensor receiver chip in 0.13-μm CMOS for noncontact vital sign detection. IEEE Trans. Microw. Theory Tech. 2010, 58, 1410–1419. [Google Scholar]
- Xiao, Y.; Lin, J.; Boric-Lubecke, O.; Lubecke, V.M. Frequency-tuning technique for remote detection of heartbeat and respiration using low-power double-sideband transmission in the Ka-band. IEEE Trans. Microw. Theory Tech. 2006, 54, 2023–2031. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Liu, D. Antenna-on-chip and antenna-in-package solutions to highly integrated millimeter-wave devices for wireless communications. IEEE Trans. Antennas Propag. 2009, 57, 2830–2841. [Google Scholar] [CrossRef]
- Schneider, M. Automotive radar—Status and trends. In Proceedings of the German Microwave Conference, Ulm, Germany, 5–7 April 2005; pp. 144–147. [Google Scholar]
- Ahmad, F.; Amin, M.G. Noncoherent approach to through-the-wall radar localization. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1405–1419. [Google Scholar] [CrossRef]
- Li, J.; Zeng, Z.; Sun, J.; Liu, F. Through-Wall Detection of Human Being’s Movement by UWB Radar. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1079–1083. [Google Scholar] [CrossRef]
- Vossiek, M.; Wiebking, L.; Gulden, P.; Wieghardt, J.; Hoffmann, C.; Heide, P. Wireless local positioning. IEEE Microw. Mag. 2003, 4, 77–86. [Google Scholar] [CrossRef]
- Grimes, D.; Jones, T. Automotive radar: A brief review. Proc. IEEE 1974, 62, 804–822. [Google Scholar] [CrossRef]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Li, C.; Lubecke, V.M.; Boric-Lubecke, O.; Lin, J. A review on recent advances in Doppler radar sensors for noncontact healthcare monitoring. IEEE Trans. Microw. Theory Tech. 2013, 61, 2046–2060. [Google Scholar] [CrossRef]
- Rotman, R. Recent advances using microwaves for imaging, hyperthermia and interstitial ablation of breast cancer tumors. In Proceedings of the IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS), Tel Aviv, Israel, 7–9 November 2011; pp. 1–4. [Google Scholar]
- Schleicher, B.; Nasr, I.; Trasser, A.; Schumacher, H. IR-UWB radar demonstrator for ultra-fine movement detection and vital-sign monitoring. IEEE Trans. Microw. Theory Tech. 2013, 61, 2076–2085. [Google Scholar] [CrossRef]
- Gu, C. Short-range noncontact sensors for healthcare and other emerging applications: A review. Sensors 2016, 16, 1169. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.M.; Misra, D.; Wang, H.; Chuang, H.R.; Postow, E. An X-Band Microwave Life-Detection System. IEEE Trans. Biomed. Eng. 1986, BME-33, 697–701. [Google Scholar] [CrossRef] [PubMed]
- Norman, A.; Kun-Mu, C.; Huang, Y.; Zhang, J. Microwave Life-Detection Systems for Searching Human Subjects Under Earthquake Rubble or Behind Barrier. IEEE Trans. Biomed. Eng. 2000, 27, 105–114. [Google Scholar]
- Yan, J.; Peng, Z.; Hong, H.; Chu, H.; Zhu, X.; Li, C. Vital-SAR-Imaging with a Drone-Based Hybrid Radar System. IEEE Trans. Microw. Theory Tech. 2018, 66, 5852–5862. [Google Scholar] [CrossRef]
- Kwag, Y.K.; Woo, I.S.; Kwak, H.Y.; Jung, Y.H. Multi-mode SDR radar platform for small air-vehicle Drone detection. In Proceedings of the 2016 CIE International Conference on Radar, RADAR 2016, Guangzhou, China, 10–13 October 2017; pp. 1–4. [Google Scholar]
- Stasiak, K.; Ciesielski, M.; Kurowska, A.; Przybysz, W. A study on using different kinds of continuous-wave radars operating in C-band for drone detection. In Proceedings of the MIKON 2018—22nd International Microwave and Radar Conference, Poznan, Poland, 14–17 May 2018; pp. 521–526. [Google Scholar]
- Liu, Y.; Wan, X.; Tang, H.; Yi, J.; Cheng, Y.; Zhang, X. Digital television based passive bistatic radar system for drone detection. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 1493–1497. [Google Scholar]
- Jian, M.; Lu, Z.; Chen, V.C. Drone detection and tracking based on phase-interferometric Doppler radar. In Proceedings of the 2018 IEEE Radar Conference, Oklahoma City, OK, USA, 23–27 April 2018; pp. 1146–1149. [Google Scholar]
- Liu, B.; Jian, M.; Lu, Z.; Chen, R. Indoor monitoring human movements using dual-receiver radar. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 520–523. [Google Scholar]
- Yilmaz, T.; Foster, R.; Hao, Y. Detecting Vital Signs with Wearablewireless Sensors. Sensors 2010, 10, 10837–10862. [Google Scholar] [CrossRef] [PubMed]
- Yavari, E.; Song, C.; Lubecke, V.; Boric-Lubecke, O. Is there anybody in there? Intelligent Radar Occupancy Sensors. IEEE Microw. Mag. 2014, 15, 57–64. [Google Scholar] [CrossRef]
- Yavari, E.; Jou, H.; Lubecke, V.; Boric-Lubecke, O. Doppler radar sensor for occupancy monitoring. In Proceedings of the 2013 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems—2013 IEEE Radio and Wireless Week, RWW 2013, Santa Clara, CA, USA, 20 January 2013; pp. 139–141. [Google Scholar]
- Li, Y.; Peng, Z.; Pal, R.; Li, C. Potential Active Shooter Detection Based on Radar Micro-Doppler and Range-Doppler Analysis Using Artificial Neural Network. IEEE Sens. J. 2019, 19, 1052–1063. [Google Scholar] [CrossRef]
- Li, Y.; Peng, Z.; Li, C. Potential active shooter detection using a portable radar sensor with micro-Doppler and range-Doppler analysis. In Proceedings of the 2017 International Applied Computational Electromagnetics Society Symposium (ACES), Suzhou, China, 1–4 August 2017; pp. 1–2. [Google Scholar]
- Liu, C.; Gu, C.; Li, C. Non-contact hand interaction with smart phones using the wireless power transfer features. In Proceedings of the IEEE Radio and Wireless Symposium, RWS, San Diego, CA, USA, 25–28 January 2015; pp. 20–22. [Google Scholar]
- Wang, F.K.; Tang, M.C.; Chiu, Y.C.; Horng, T.S. Gesture Sensing Using Retransmitted Wireless Communication Signals Based on Doppler Radar Technology. IEEE Trans. Microw. Theory Tech. 2015, 63, 4592–4602. [Google Scholar] [CrossRef]
- Peng, Z.; Li, C.; Muñoz-Ferreras, J.M.; Gómez-García, R. An FMCW radar sensor for human gesture recognition in the presence of multiple targets. In Proceedings of the IEEE MTT-S International Microwave Bio Conference (IMBIOC), Gothenburg, Sweden, 15–17 May 2017; pp. 1–3. [Google Scholar]
- Lien, J.; Gillian, N.; Karagozler, M.E.; Amihood, P.; Schwesig, C.; Olson, E.; Raja, H.; Poupyrev, I. Soli: Ubiquitous Gesture Sensing with Millimeter Wave Radar. ACM Trans. Graph. 2016, 35, 1–19. [Google Scholar] [CrossRef]
- Li, C.; Peng, Z.; Huang, T.Y.; Fan, T.; Wang, F.K.; Horng, T.S.; Muñoz-Ferreras, J.M.; Gómez-garcía, R.; Ran, L.; Lin, J. A review on recent progress of portable short-range noncontact microwave radar systems. IEEE Trans. Microw. Theory Tech. 2017, 65, 1692–1706. [Google Scholar] [CrossRef]
- Peng, Z.; Muñoz-Ferreras, J.M.; Gómez-García, R.; Ran, L.; Li, C. 24-GHz biomedical radar on flexible substrate for ISAR imaging. In Proceedings of the IEEE MTT-S International Wireless Symposium (IWS), Shanghai, China, 14–16 March 2016; pp. 1–4. [Google Scholar]
- Peng, Z.; Muñoz-Ferreras, J.M.; Tang, Y.; Liu, C.; Gómez-García, R.; Ran, L.; Li, C. A portable FMCW interferometry radar with programmable low-IF architecture for localization, ISAR imaging, and vital sign tracking. IEEE Trans. Microw. Theory Tech. 2017, 65, 1334–1344. [Google Scholar] [CrossRef]
- Feger, R.; Wagner, C.; Schuster, S.; Scheiblhofer, S.; Jager, H.; Stelzer, A. A 77-GHz FMCW MIMO radar based on an SiGe single-chip transceiver. IEEE Trans. Microw. Theory Tech. 2009, 57, 1020–1035. [Google Scholar] [CrossRef]
- Bleh, D.; Rosch, M.; Kuri, M.; Dyck, A.; Tessmann, A.; Leuther, A.; Wagner, S.; Weismann-Thaden, B.; Stulz, H.P.; Zink, M.; et al. W-band time-domain multiplexing FMCW MIMO radar for far-field 3D imaging. IEEE Trans. Microw. Theory Tech. 2017, 65, 3474–3484. [Google Scholar] [CrossRef]
- Maaref, N.; Millot, P.; Pichot, C.; Picon, O. A Study of UWB FM-CW Radar for the Detection of Human Beings in Motion Inside a Building. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1297–1300. [Google Scholar] [CrossRef]
- Morgan, M.A. Ultra-Wideband Impulse Scattering Measurements. IEEE Trans. Antennas Propag. 1994, 42, 840–846. [Google Scholar] [CrossRef]
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.M.; Lin, J. 0.25-m CMOS and BiCMOS single-chip direct-conversion Doppler radars for remote sensing of vital signs. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 7 February 2002; Volume 1, pp. 348–349. [Google Scholar]
- Gu, C.; Li, R.; Zhang, H.; Fung, A.Y.; Torres, C.; Jiang, S.B.; Li, C. Accurate respiration measurement using DC-coupled continuous-wave radar sensor for motion-adaptive cancer radiotherapy. IEEE Trans. Biomed. Eng. 2012, 59, 3117–3123. [Google Scholar] [PubMed]
- Li, C.; Ling, J.; Li, J.; Lin, J. Accurate doppler radar noncontact vital sign detection using the RELAX algorithm. IEEE Trans. Instrum. Meas. 2010, 59, 687–695. [Google Scholar]
- Wang, J.; Wang, X.; Chen, L.; Huangfu, J.; Li, C.; Ran, L. Noncontact distance and amplitude-independent vibration measurement based on an extended DACM algorithm. IEEE Trans. Instrum. Meas. 2014, 63, 145–153. [Google Scholar] [CrossRef]
- Gu, C.; Peng, Z.; Li, C. High-Precision Motion Detection Using Low-Complexity Doppler Radar with Digital Post-Distortion Technique. IEEE Trans. Microw. Theory Tech. 2016, 64, 961–971. [Google Scholar] [CrossRef]
- Muñoz-Ferreras, J.M.; Peng, Z.; Tang, Y.; Gómez-García, R.; Liang, D.; Li, C. A step forward towards radar sensor networks for structural health monitoring of wind turbines. In Proceedings of the IEEE Radio and Wireless Symposium (RWS), Austin, TX, USA, 24–27 January 2016; pp. 23–25. [Google Scholar]
- Muñoz-Ferreras, J.M.; Peng, Z.; Tang, Y.; Gómez-García, R.; Liang, D.; Li, C. Short-range Doppler-radar signatures from industrial wind turbines: Theory, simulations, and measurements. IEEE Trans. Instrum. Meas. 2016, 65, 2108–2119. [Google Scholar] [CrossRef]
- Wang, G.; Gu, C.; Inoue, T.; Li, C. A Hybrid FMCW-Interferometry Radar for Indoor Precise Positioning and Versatile Life Activity Monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Zhuge, X.; Yarovoy, A.G. A sparse aperture MIMO-SAR-based UWB imaging system for concealed weapon detection. IEEE Trans. Geosci. Remote Sens. 2011, 49, 509–518. [Google Scholar] [CrossRef]
- Ahmed, S.S.; Schiessl, A.; Schmidt, L.P. A novel fully electronic active real-time imager based on a planar multistatic sparse array. IEEE Trans. Microw. Theory Tech. 2011, 59, 3567–3576. [Google Scholar] [CrossRef]
- Bleh, D.; Rösch, M.; Kuri, M.; Dyck, A.; Tessmann, A.; Leuther, A.; Wagner, S.; Ambacher, O. A 100 GHz FMCW MIMO radar system for 3D image reconstruction. In Proceedings of the European Radar Conference (EuRAD), London, UK, 5–7 October 2017; pp. 37–40. [Google Scholar]
- Pei, B.; Li, C.; Zhang, Y.; Pei, T. A compressed sensing based MIMO radar imaging. In Proceedings of the Asia Modelling Symposium 2013: 7th Asia International Conference on Mathematical Modelling and Computer Simulation (AMS), Hong Kong, China, 23–25 July 2013; pp. 122–127. [Google Scholar]
- Peng, Z.; Ran, L.; Li, C. A κ-band portable FMCW radar with beamforming array for short-range localization and vital-Doppler targets discrimination. IEEE Trans. Microw. Theory Tech. 2017, 65, 3443–3452. [Google Scholar] [CrossRef]
- Peng, Z.; Li, C. A Portable K-Band 3D MIMO Radar With Nonuniformly Spaced Array for Short-Range Localization. IEEE Trans. Microw. Theory Tech. 2018, 1–12. [Google Scholar] [CrossRef]
- Park, B.K.; Boric-Lubecke, O.; Lubecke, V.M. Arctangent demodulation with DC offset compensation in quadrature Doppler radar receiver systems. IEEE Trans. Microw. Theory Tech. 2007, 55, 1073–1078. [Google Scholar] [CrossRef]
- Wang, G.; Muñoz-Ferreras, J.M.; Gu, C.; Li, C.; Gómez-García, R. Application of linear-frequency-modulated continuous-wave (LFMCW) radars for tracking of vital signs. IEEE Trans. Microw. Theory Tech. 2014, 62, 1387–1399. [Google Scholar] [CrossRef]
- Visser, H.J. Array and Phased Array Antenna Basics; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Lee, M.S.; Kim, Y.H. Design and performance of a 24-GHz switch-antenna array FMCW radar system for automotive applications. IEEE Trans. Veh. Technol. 2010, 59, 2290–2297. [Google Scholar]
- Lee, W.; Kim, J.; Yoon, Y.J. Compact two-layer rotman lens-fed microstrip antenna array at 24 GHz. IEEE Trans. Antennas Propag. 2011, 59, 460–466. [Google Scholar] [CrossRef]
- Hashemi, H.; Guan, X.; Komijani, A.; Hajimiri, A. A 24-GHz SiGe phased-array receiver—LO phase-shifting approach. IEEE Trans. Microw. Theory Tech. 2005, 53, 614–625. [Google Scholar] [CrossRef]
- Guan, X.; Hashemi, H.; Hajimiri, A. A fully integratted 24-GHz eight-element phased-array receiver in silicon. IEEE J. Solid-State Circ. 2004, 39, 2311–2320. [Google Scholar] [CrossRef]
- Yu, T.; Rebeiz, G.M. A 22–24 GHz 4-element CMOS phased array with on-chip coupling characterization. IEEE J. Solid-State Circ. 2008, 43, 2134–2143. [Google Scholar] [CrossRef]
- Wang, C.W.; Wu, H.S.; Tzuang, C.K.C. CMOS Passive Phase Shifter With Group-Delay Deviation of 6.3 ps at K-Band. IEEE Trans. Microw. Theory Tech. 2011, 59, 1778–1786. [Google Scholar] [CrossRef]
- Fuchs, B.; Skrivervik, A.; Mosig, J.R. Sparse array synthesis via sequential convex optimizations: Convened session—“Non-uniform array antennas”. In Proceedings of the 6th European Conference on Antennas and Propagation, EuCAP 2012, Prague, Czech Republic, 26–30 March 2012; pp. 2216–2219. [Google Scholar]
- Alwan, E.A.; Venkatakrishnan, S.B.; Akhiyat, A.A.; Khalil, W.; Volakis, J.L. Code Optimization for a Code-Modulated RF Front End. IEEE Access 2015, 3, 260–273. [Google Scholar] [CrossRef] [Green Version]
- Fredrick, J.D.; Wang, Y.; Itoh, T. Smart antennas based on Spatial Multiplexing of Local Elements (SMILE) for mutual coupling reduction. IEEE Trans. Antennas Propag. 2004, 52, 106–114. [Google Scholar] [CrossRef]
- Alwan, E.A.; Balasubramanian, S.; Atallah, J.G.; LaRue, M.; Sertel, K.; Khalil, W.; Volakis, J.L. Coding-based ultra-wideband digital beamformer with significant hardware reduction. Analog Integr. Circ. Signal Process. 2014, 78, 691–703. [Google Scholar] [CrossRef]
- Peng, Z.; Kim, K.J.; Wang, P.; Ma, R.; Kihira, K.; Fukasawa, T.; Li, C.; Wang, B. Code-Division Multiplexing based Hardware Reduction for a Digital Beamforming Transmitter Array. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP), London, UK, 9–13 April 2018. [Google Scholar]
- Morinaga, M.; Nagasaku, T.; Shinoda, H.; Kondoh, H. 24 GHz intruder detection radar with beam-switched area coverage. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), Honolulu, HI, USA, 3–8 June 2007; pp. 389–392. [Google Scholar]
- Peng, Z.; Chen, J.; Dong, Y.; Zhang, B.; Qiao, S.; Ye, D.; Huangfu, J.; Sun, Y.; Li, C.; Ran, L.; et al. Radio Frequency Beamforming Based on a Complex Domain Frontend. IEEE Trans. Microw. Theory Tech. 2016, 64, 289–298. [Google Scholar] [CrossRef]
- Pavlovic, V.I.; Sharma, R.; Huang, T.S. Visual interpretation of hand gestures for human-computer interaction: A review. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 677–695. [Google Scholar] [CrossRef]
- Fan, T.; Ma, C.; Gu, Z.; Lv, Q.; Chen, J.; Ye, D.; Huangfu, J.; Sun, Y. Wireless Hand Gesture Recognition Based on Continuous-Wave Doppler Radar Sensors. IEEE Trans. Microw. Theory Tech. 2016, 64, 4012–4020. [Google Scholar] [CrossRef]
- Yu, M.; Naqvi, S.; Rhuma, A.; Chambers, J. One class boundary method classifiers for application in a video-based fall detection system. IET Comput. Vis. 2012, 6, 90. [Google Scholar] [CrossRef]
- Bian, Z.P.; Hou, J.; Chau, L.P.; Magnenat-Thalmann, N. Fall detection based on body part tracking using a depth camera. IEEE J. Biomed. Health Inform. 2015, 19, 430–439. [Google Scholar] [CrossRef] [PubMed]
- Vaidehi, V.; Ganapathy, K.; Mohan, K.; Aldrin, A.; Nirmal, K. Video based automatic fall detection in indoor environment. In Proceedings of the 2011 International Conference on Recent Trends in Information Technology (ICRTIT), Tamil Nadu, India, 3–5 June 2011; pp. 1016–1020. [Google Scholar]
- Cheng, J.; Chen, X.; Shen, M. A framework for daily activity monitoring and fall detection based on surface electromyography and accelerometer signals. IEEE J. Biomed. Health Inform. 2013, 17, 38–45. [Google Scholar] [CrossRef] [PubMed]
- Garripoli, C.; Mercuri, M.; Karsmakers, P.; Jack Soh, P.; Crupi, G.; Vandenbosch, G.A.E.; Pace, C.; Leroux, P.; Schreurs, D. Embedded DSP-based telehealth radar system for remote indoor fall detection. IEEE J. Biomed. Health Informat. 2015, 19, 92–101. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Tao, W.; Zhang, Y.D.; Amin, M.G. Radar-based fall detection based on Doppler time–frequency signatures for assisted living. IET Radar Sonar Navig. 2015, 9, 164–172. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Muñoz-Ferreras, J.M.; Gómez-García, R.; Li, C. FMCW radar fall detection based on ISAR processing utilizing the properties of RCS, range, and Doppler. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), San Francisco, CA, USA, 22–27 May 2016; pp. 5–7. [Google Scholar]
- Tahmoush, D.; Silvious, J.; Clark, J. An UGS Radar with Micro-Doppler Capabilties for Wide Area Persistent Surveillance. Proc. SPIE 2010, 7669. [Google Scholar] [CrossRef]
- Tahmoush, D.; Silvious, J. Radar polarimetry for security applications. In Proceedings of the 7th European Radar Conference, Paris, France, 30 September–1 October 2010; pp. 471–474. [Google Scholar]
- Smith, T. Weapon Location by Acoustic-Optic Sensor Fusion. U.S. Patent 6,621,764B1, 20 February 2001. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Model No. | Frequency |
|---|---|---|
| Analog Devices | ADF4159, ADF5901, and ADF5904 chipset | 24 GHz |
| Texas Instruments | AWR1642, AWR1443, etc. | 77 GHz |
| NXP Semiconductors | TEF8181EN, TEF8102EN | 77 GHz |
| Infineon | BGT24MTR11, BGT24LTR11N16, etc. | 24 GHz |
| RTN7735PL | 77 GHz |
| Manufacturer | Frequency | Example Model | Application |
|---|---|---|---|
| Continental AG | 77 GHz | ARS441 | Automotive |
| Bosch | 77 GHz | LRR4 | Automotive |
| Aptiv | 77 GHz | ESR | Automotive |
| Arbe Robotics | - | - | Automotive |
| Metawave | 77 GHz | - | Automotive |
| Caaresys | - | - | Automotive |
| Echodyne | - | ECHOGUARD | Industry |
| Innosent | 24 GHz | ISYS-4004 | Industry |
| RFBeam | 24 GHz | K-LC1a V5 | Industry |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Z.; Li, C. Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review. Sensors 2019, 19, 1136. https://doi.org/10.3390/s19051136
Peng Z, Li C. Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review. Sensors. 2019; 19(5):1136. https://doi.org/10.3390/s19051136
Chicago/Turabian StylePeng, Zhengyu, and Changzhi Li. 2019. "Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review" Sensors 19, no. 5: 1136. https://doi.org/10.3390/s19051136
APA StylePeng, Z., & Li, C. (2019). Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review. Sensors, 19(5), 1136. https://doi.org/10.3390/s19051136