Enhancing Output Power of a Cantilever-Based Flapping Airflow Energy Harvester Using External Mechanical Interventions



Abstract
:1. Introduction
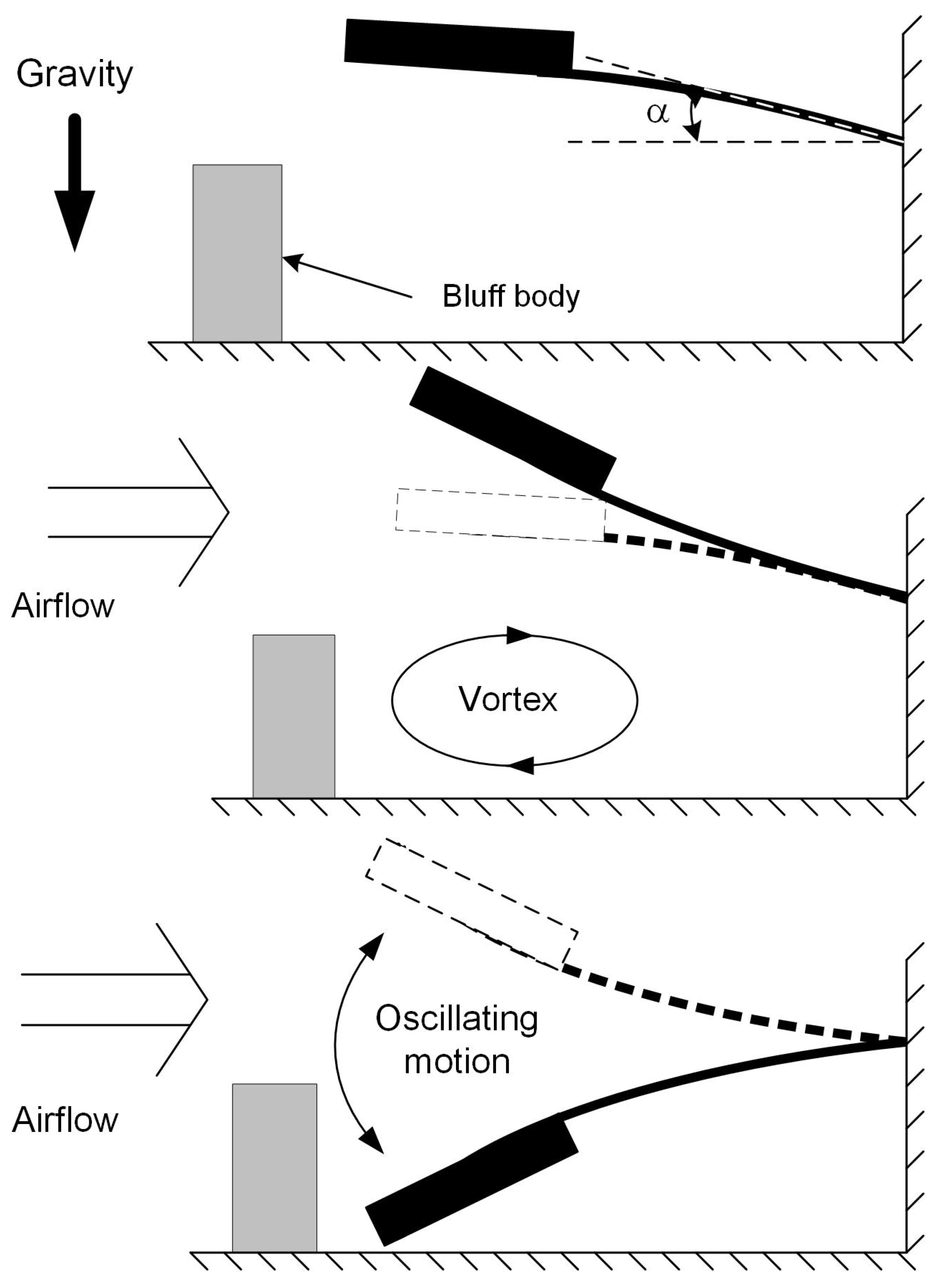
2. Original Design and Principles
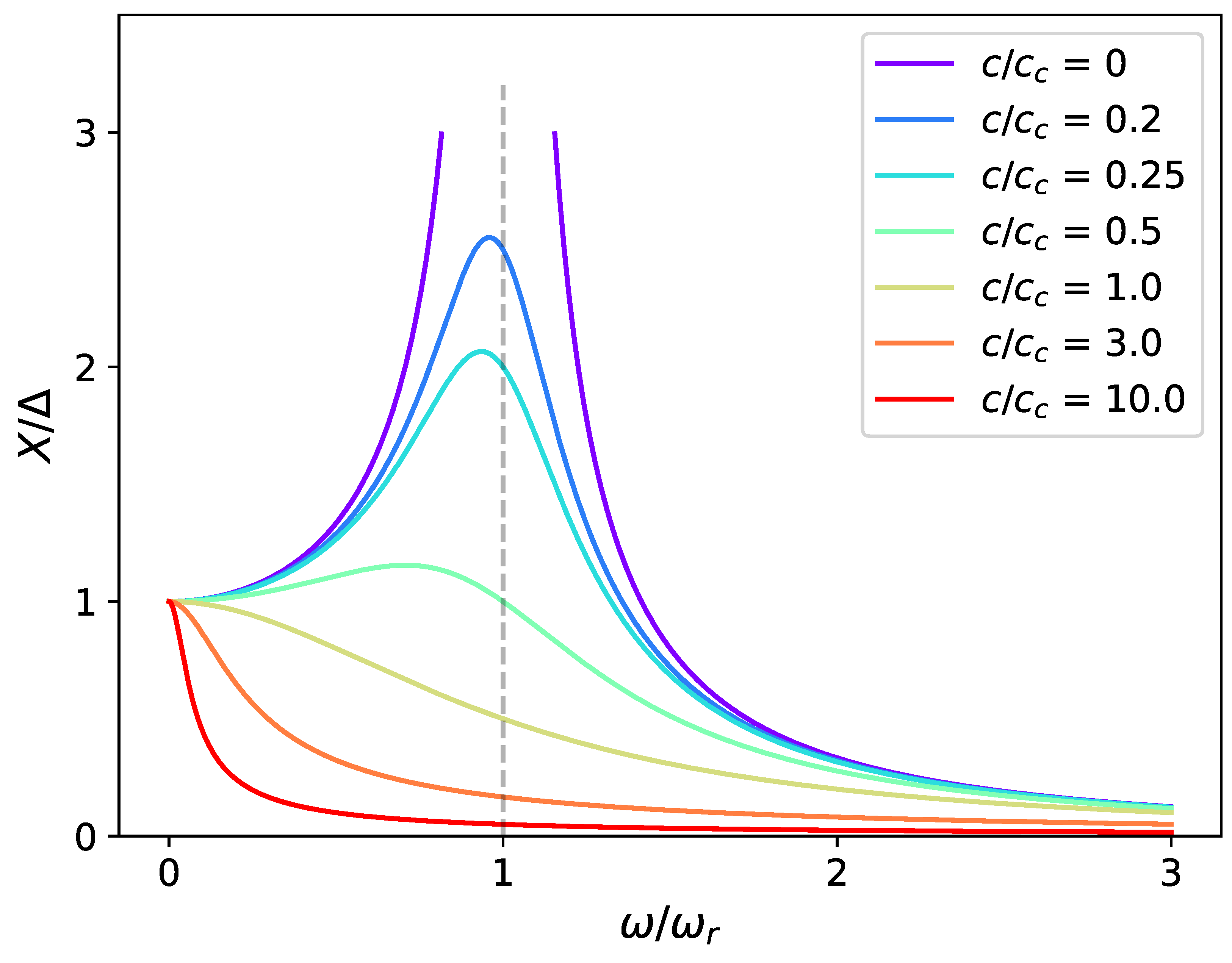
3. Effect of Damping Ratio on Magnification for a System of One Degree of Freedom
4. Mechanical Interventions
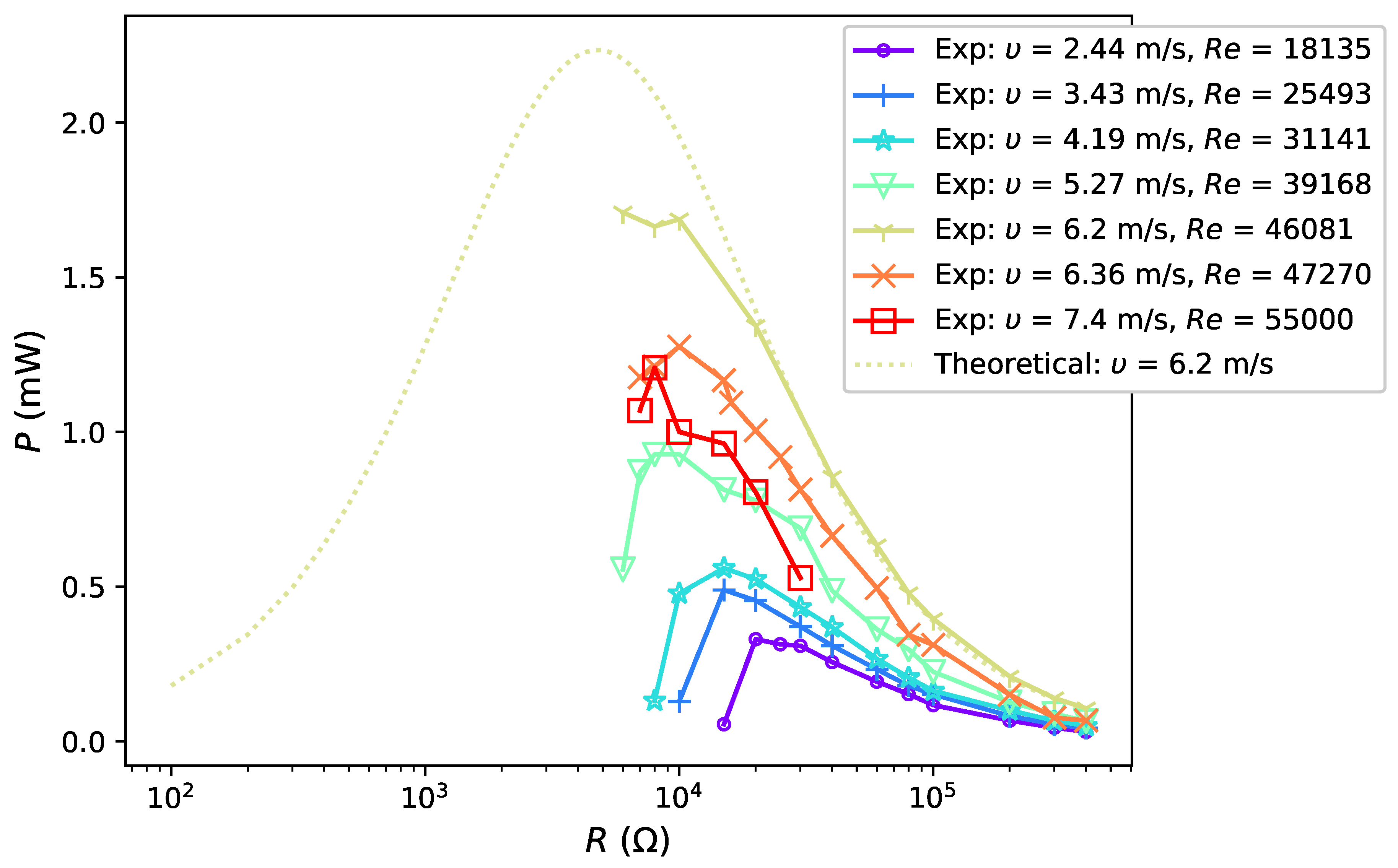
4.1. Mechanical Intervention—Investigation of Airflow Velocities
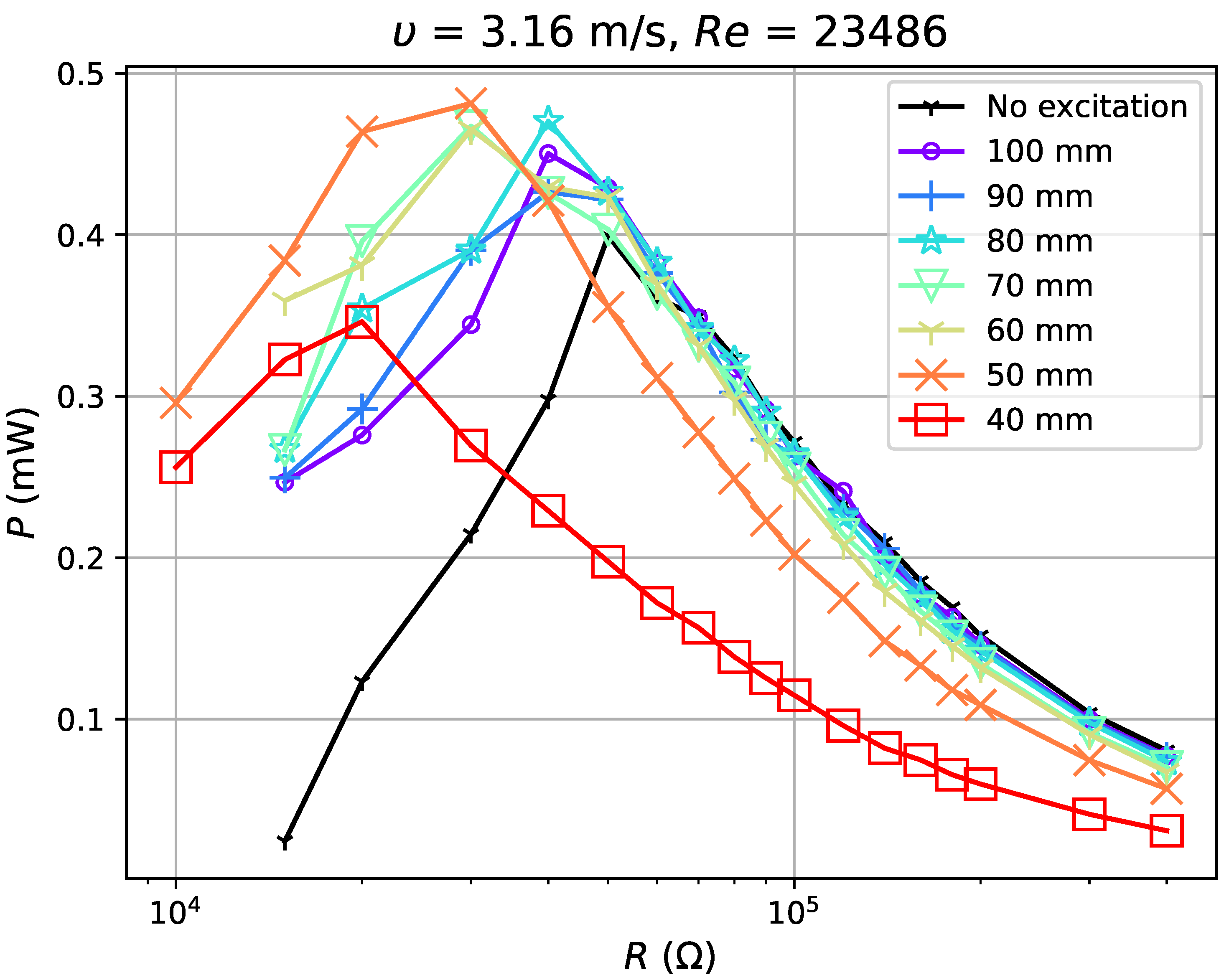
4.2. Mechanical Intervention—Application of External Magnetic Excitation
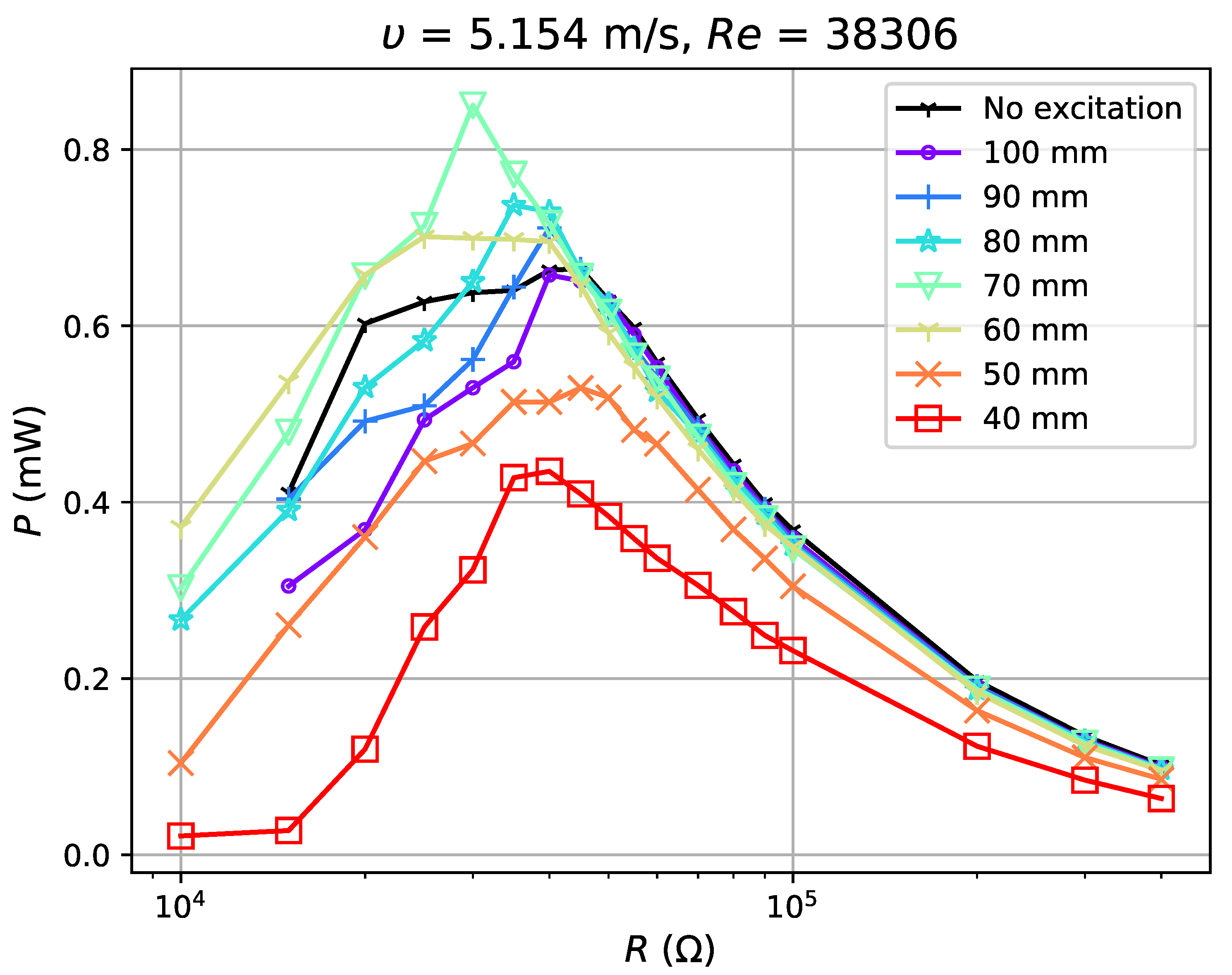
4.2.1. Experimental Results and Discussion
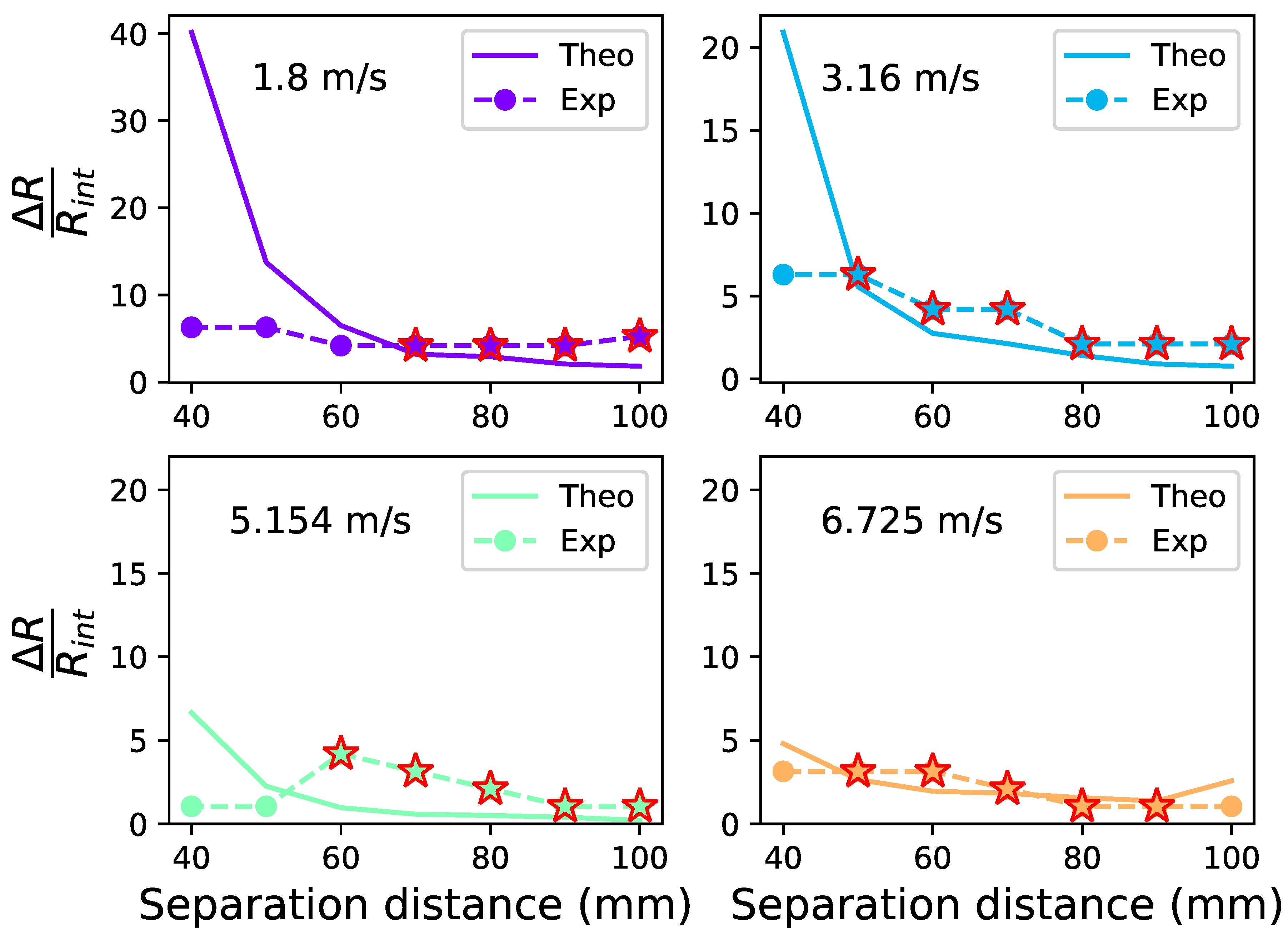
4.2.2. Evaluation of the Mechanical Intervention in Power Increase
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhu, Q.; Peng, Z. Mode coupling and flow energy harvesting by a flapping foil. Phys. Fluids 2009, 21, 033601. [Google Scholar] [CrossRef]
- Zhu, Q. Optimal frequency for flow energy harvesting of a flapping foil. J. Fluid Mech. 2011, 675, 495–517. [Google Scholar] [CrossRef]
- Hoke, C.; Young, J.; Lai, J. Effects of time-varying camber deformation on flapping foil propulsion and power extraction. J. Fluids Struct. 2015, 56, 152–176. [Google Scholar] [CrossRef]
- Teng, L.; Deng, J.; Pan, D.; Shao, X. Effects of non-sinusoidal pitching motion on energy extraction performance of a semi-active flapping foil. Renew. Energy 2016, 85, 810–818. [Google Scholar] [CrossRef]
- Wu, J.; Qiu, Y.; Shu, C.; Zhao, N. Pitching-motion-activated flapping foil near solid walls for power extraction: A numerical investigation. Phys. Fluids 2014, 26, 083601. [Google Scholar] [CrossRef]
- Wu, J.; Shu, C.; Zhao, N.; Tian, F.B. Numerical study on the power extraction performance of a flapping foil with a flexible tail. Phys. Fluids 2015, 27, 013602. [Google Scholar] [CrossRef]
- Wu, J.; Chen, Y.; Zhao, N. Role of induced vortex interaction in a semi-active flapping foil based energy harvester. Phys. Fluids 2015, 27, 093601. [Google Scholar] [CrossRef]
- Li, D.; Wu, Y.; Da Ronch, A.; Xiang, J. Energy harvesting by means of flow-induced vibrations on aerospace vehicles. Prog. Aerosp. Sci. 2016, 86, 28–62. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhao, L.; Tang, L. Comparative study of tip cross-sections for efficient galloping energy harvesting. Appl. Phys. Lett. 2013, 102, 064105. [Google Scholar] [CrossRef]
- Bibo, A.; Daqaq, M. On the optimal performance and universal design curves of galloping energy harvesters. Appl. Phys. Lett. 2014, 104, 023901. [Google Scholar] [CrossRef]
- Noel, J.; Yadav, R.; Li, G.; Daqaq, M. Improving the performance of galloping micro-power generators by passively manipulating the trailing edge. Appl. Phys. Lett. 2018, 112, 083503. [Google Scholar] [CrossRef]
- Hu, G.; Tse, K.T.; Kwok, K.C. Enhanced performance of wind energy harvester by aerodynamic treatment of a square prism. Appl. Phys. Lett. 2016, 108, 123901. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, S.; Zhang, Z.; Yurchenko, D. High-performance piezoelectric wind energy harvester with Y-shaped attachments. Energy Convers. Manag. 2019, 181, 645–652. [Google Scholar] [CrossRef]
- Zhao, L.; Tang, L.; Yang, Y. Enhanced piezoelectric galloping energy harvesting using 2 degree-of-freedom cut-out cantilever with magnetic interaction. Jpn. J. Appl. Phys. 2014, 53, 060302. [Google Scholar] [CrossRef]
- Dai, H.; Abdelkefi, A.; Javed, U.; Wang, L. Modeling and performance of electromagnetic energy harvesting from galloping oscillations. Smart Mater. Struct. 2015, 24, 045012. [Google Scholar] [CrossRef]
- Bibo, A.; Abdelkefi, A.; Daqaq, M.F. Modeling and characterization of a piezoelectric energy harvester under combined aerodynamic and base excitations. J. Vib. Acoust. 2015, 137, 031017. [Google Scholar] [CrossRef]
- Bibo, A.; Daqaq, M.F. An analytical framework for the design and comparative analysis of galloping energy harvesters under quasi-steady aerodynamics. Smart Mater. Struct. 2015, 24, 094006. [Google Scholar] [CrossRef] [Green Version]
- Tan, T.; Yan, Z. Analytical solution and optimal design for galloping-based piezoelectric energy harvesters. Appl. Phys. Lett. 2016, 109, 253902. [Google Scholar] [CrossRef]
- Tan, T.; Yan, Z. Electromechanical decoupled model for cantilever-beam piezoelectric energy harvesters with inductive-resistive circuits and its application in galloping mode. Smart Mater. Struct. 2017, 26, 035062. [Google Scholar] [CrossRef]
- Zhu, D.; Beeby, S.P.; Tudor, M.J.; White, N.M.; Harris, N.R. Novel miniature airflow energy harvester for wireless sensing applications in buildings. IEEE Sens. J. 2013, 13, 691–700. [Google Scholar] [CrossRef]
- Zhu, D.; Beeby, S.; Tudor, J.; White, N.; Harris, N. A novel miniature wind generator for wireless sensing applications. In Proceedings of the 2010 IEEE Sensors, Kona, HI, USA, 1–4 November 2010; pp. 1415–1418. [Google Scholar]
- Zhu, D.; Beeby, S.; Tudor, J.; Harris, N.; White, N. Airflow energy harvester for wireless sensing in air duct. In Proceedings of the PowerMEMS 2011, Seoul, Korea, 15–18 November 2011. [Google Scholar]
- Sun, H.; Zhu, D.; White, N.; Beeby, S. A miniature airflow energy harvester from piezoelectric materials. J. Phys. Conf. Ser. 2013, 476, 012057. [Google Scholar] [CrossRef]
- Coates, R.C.; Kong, F.K.; Coutie, M.G. Structural Analysis; A Halsted Press Book; Wiley: New York, NY, USA, 1972. [Google Scholar]
- Zhu, D. Methods of Frequency Tuning Vibration Based Micro-Generator. Ph.D. Thesis, University of Southampton, Southampton, UK, 2009. [Google Scholar]
- Dorf, R.C.; Svoboda, J.A. Introduction to Electric Circuits; John Wiley & Sons: New York, NY, USA, 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| E (Pa) | Young’s modulus of the beam | |
| L (m) | Length of the beam | |
| w (m) | Width of the beam | |
| h (m) | Thickness of the beam | |
| m (kg) | Mass of the wing with magnet (tip mass) | |
| (m) | Span of the wing | |
| (m) | Chord of the wing | |
| () | Attack angle of the wing in experiment | 10∼15 |
| () | Internal resistance of the system | 4770 |
| (ms) | Kinematic viscosity of air at 15 | |
| Mechanical damping without magnetic excitation |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhu, D. Enhancing Output Power of a Cantilever-Based Flapping Airflow Energy Harvester Using External Mechanical Interventions. Sensors 2019, 19, 1499. https://doi.org/10.3390/s19071499
Wang L, Zhu D. Enhancing Output Power of a Cantilever-Based Flapping Airflow Energy Harvester Using External Mechanical Interventions. Sensors. 2019; 19(7):1499. https://doi.org/10.3390/s19071499
Chicago/Turabian StyleWang, Liuqing, and Dibin Zhu. 2019. "Enhancing Output Power of a Cantilever-Based Flapping Airflow Energy Harvester Using External Mechanical Interventions" Sensors 19, no. 7: 1499. https://doi.org/10.3390/s19071499
APA StyleWang, L., & Zhu, D. (2019). Enhancing Output Power of a Cantilever-Based Flapping Airflow Energy Harvester Using External Mechanical Interventions. Sensors, 19(7), 1499. https://doi.org/10.3390/s19071499