A Grey Wolf Optimization-Based Track-Before-Detect Method for Maneuvering Extended Target Detection and Tracking

Abstract
:1. Introduction
2. Preliminaries
2.1. Target Model
2.2. Problem Statement
2.3. GWO Algorithm
3. Methodology
3.1. Introduction of the GWO-TBD
3.2. Implementation of the GWO-TBD
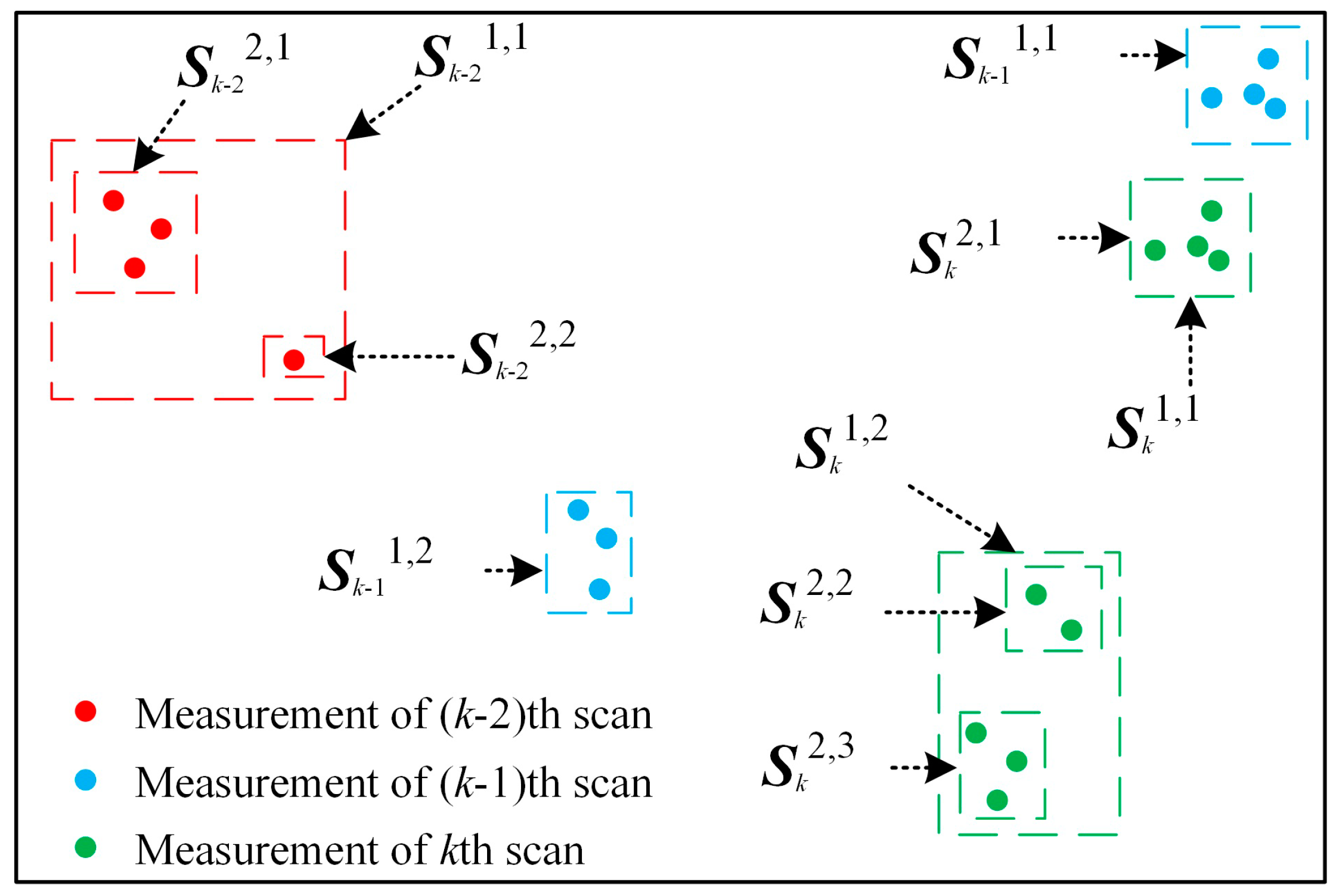
3.2.1. Initial Population
3.2.2. The Fitness Function
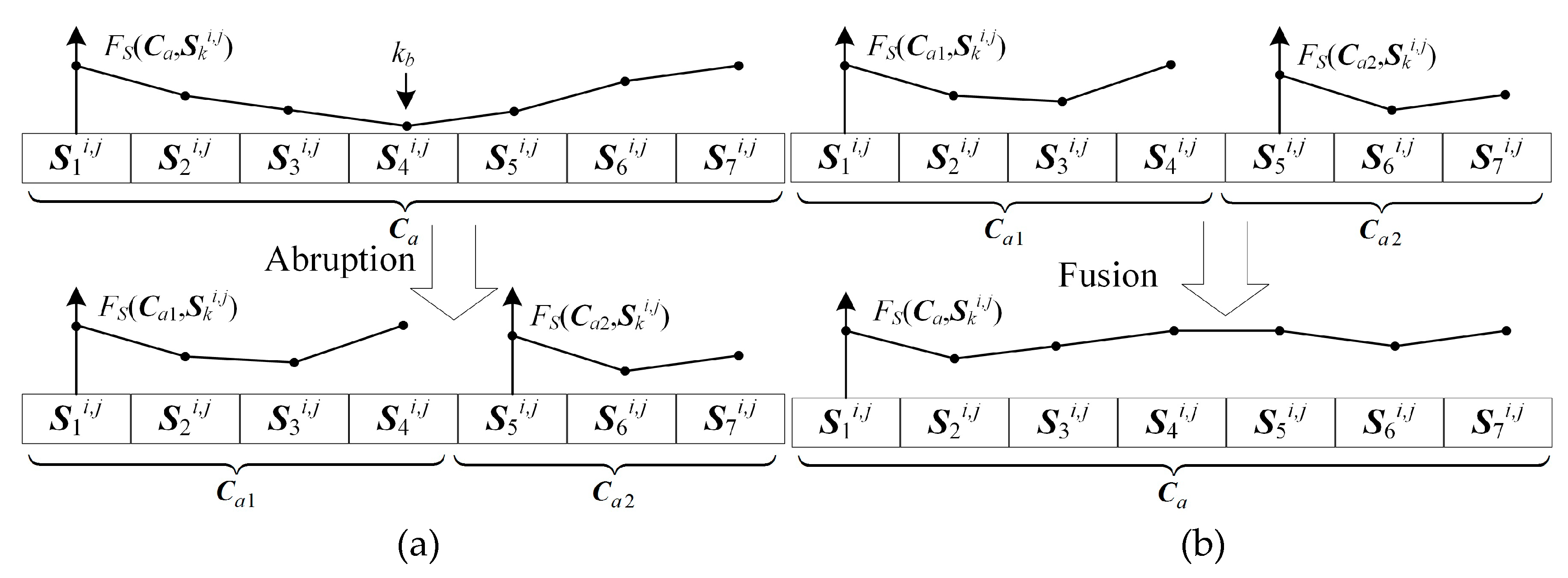
3.2.3. Selection, Abruption, and Fusion
3.2.4. Exploration
4. Experimental
4.1. Synthetic Result
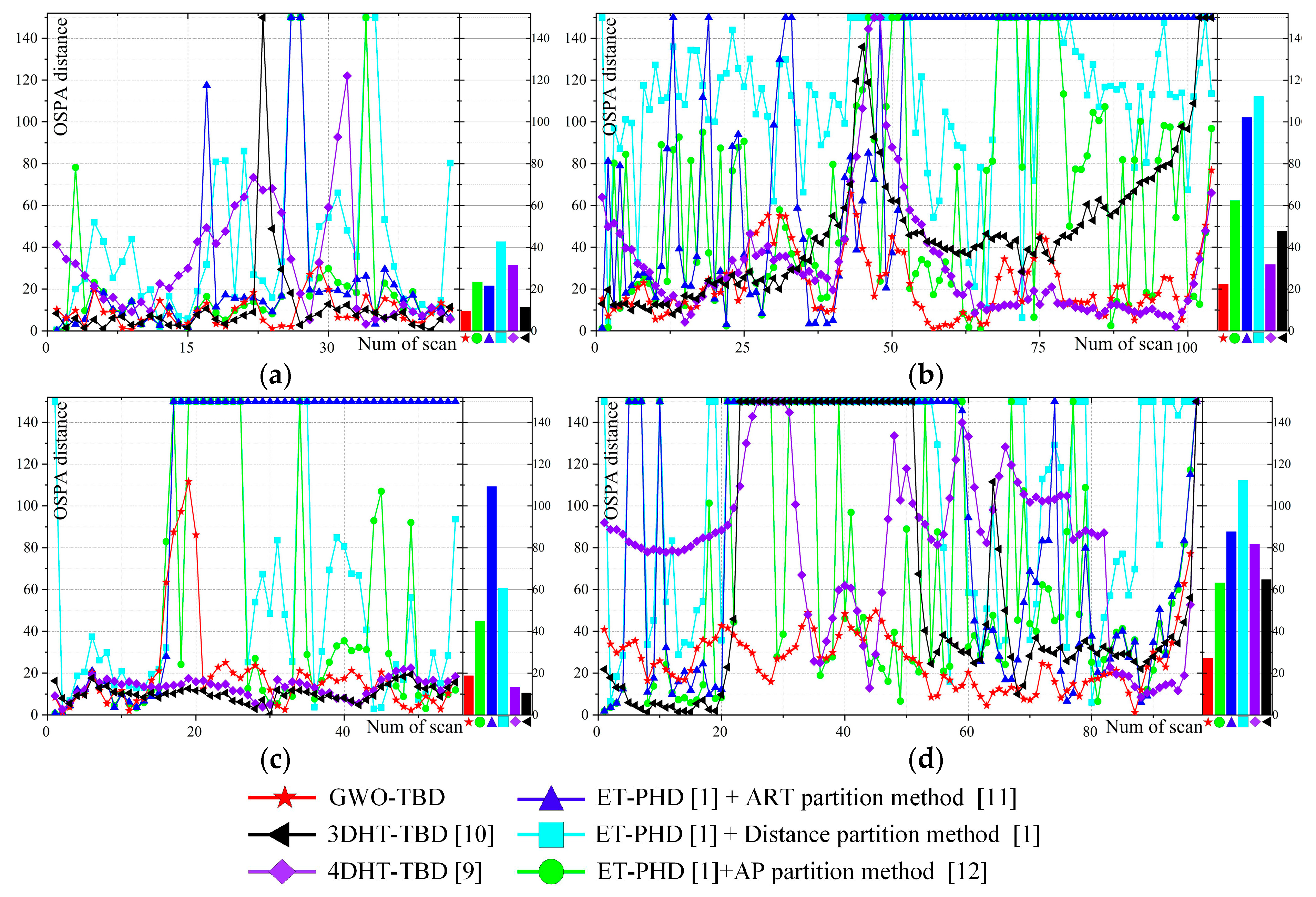
4.2. Results with Real Data
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 3 dB azimuth beam width | 1.17° |
| Angular Precision | 0.0439° |
| Range Resolution | 24(m) |
| Number of range bin | 8192 |
| Scanning cycle of radar | 2(s) |
| Rotating speed of antenna | 180(°/s) |
| S1 | S2 | S3 | S4 | Ave | S1 | S2 | S3 | S4 | Ave | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
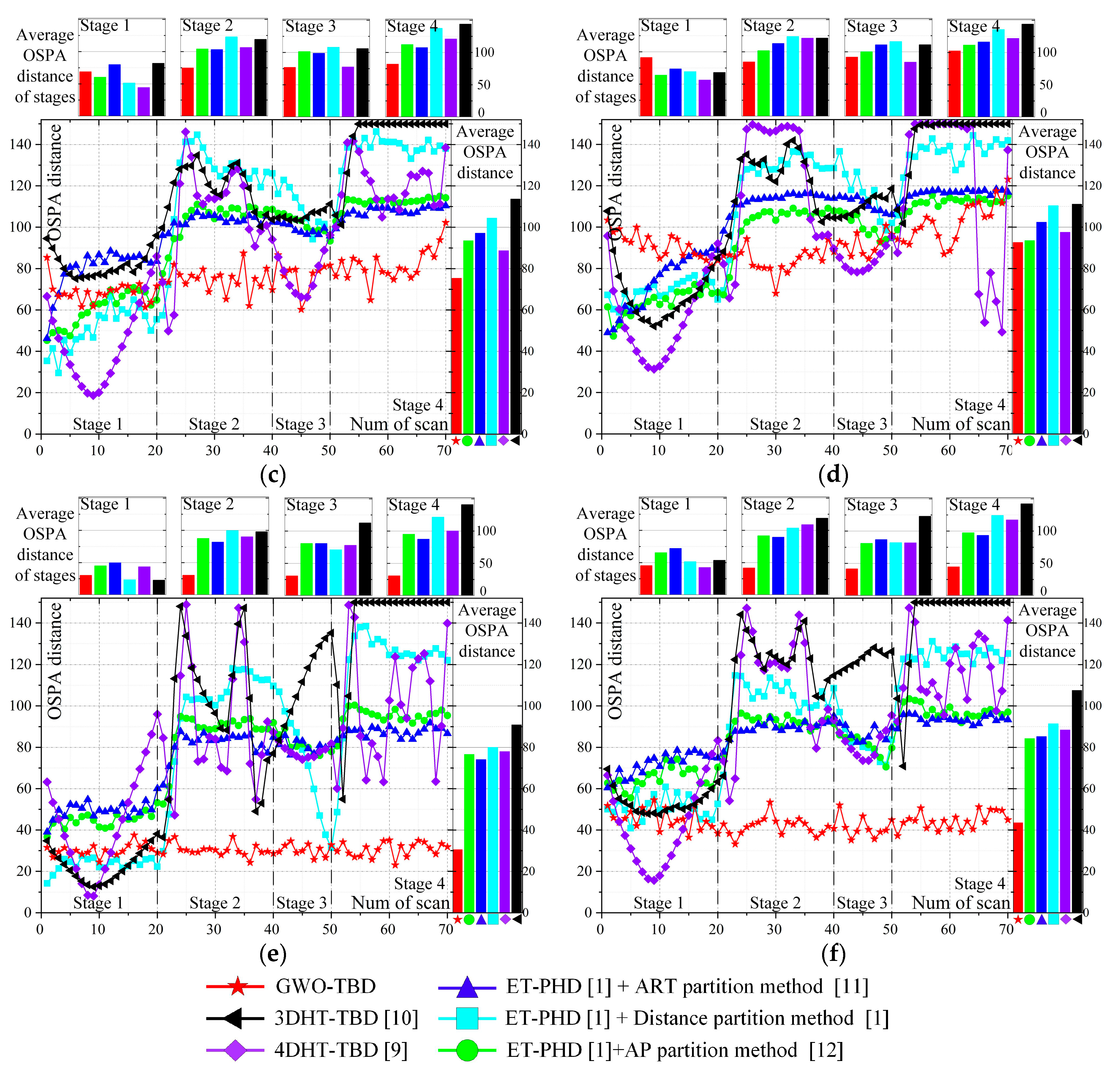
| GWO-TBD | Scenario 1 | 18.7 | 18.2 | 19.8 | 26.2 | 20.8 | Scenario 4 | 91.2 | 84.3 | 91.8 | 102.5 | 92.5 |
| ET-PHD [1] + AP [12] | 62 | 74.3 | 68.8 | 99.8 | 77.3 | 63.8 | 101.7 | 100 | 111.5 | 93.4 | ||
| ET-PHD [1] + ART [11] | 54.4 | 57.6 | 55.8 | 63.1 | 58 | 73.6 | 112.9 | 110.9 | 116.4 | 102.4 | ||
| ET-PHD [1] + Distance [1] | 51.2 | 82.6 | 77.4 | 94.5 | 76.3 | 69.1 | 123.6 | 115.8 | 135.6 | 110.3 | ||
| 4DHT-TBD [9] | 40.1 | 97.5 | 78.6 | 108.3 | 81.5 | 56.2 | 121.2 | 83.9 | 121.9 | 97.5 | ||
| 3DHT-TBD [10] | 45.2 | 103.4 | 103.7 | 141.7 | 97.8 | 68 | 121.3 | 110.9 | 144.1 | 111.1 | ||
| GWO-TBD | Scenario 2 | 41.3 | 39.9 | 38.1 | 46 | 41.8 | Scenario 5 | 30.2 | 30.4 | 30.5 | 30.7 | 30.5 |
| ET-PHD [1] + AP [12] | 64.2 | 89.2 | 82.3 | 95.1 | 82.8 | 44.9 | 87.5 | 80.7 | 95.1 | 76.5 | ||
| ET-PHD [1] + ART [11] | 57.9 | 81 | 78.2 | 86.2 | 75.5 | 49.7 | 81.7 | 80.8 | 87.4 | 74.1 | ||
| ET-PHD [1] + Distance [1] | 45.8 | 98.7 | 84.7 | 123 | 88.5 | 23.4 | 99.5 | 70.9 | 121.4 | 79.9 | ||
| 4DHT-TBD [9] | 43.3 | 100.3 | 77.8 | 120.7 | 86.6 | 43.5 | 90 | 78 | 100.2 | 77.9 | ||
| 3DHT-TBD [10] | 35.8 | 104.9 | 110.9 | 142.2 | 96.7 | 22.8 | 97.8 | 112.7 | 141 | 90.9 | ||
| GWO-TBD | Scenario 3 | 68.7 | 74.6 | 76.8 | 81.9 | 75.3 | Scenario 6 | 45.3 | 41.7 | 41.4 | 44.5 | 43.5 |
| ET-PHD [1] + AP [12] | 60.2 | 104 | 101.4 | 112.2 | 93.4 | 65.2 | 91.6 | 80.9 | 97.3 | 84.2 | ||
| ET-PHD [1] + ART [11] | 79.8 | 103.1 | 98.8 | 107.5 | 97.1 | 71.9 | 89.3 | 86.8 | 93.4 | 85.2 | ||
| ET-PHD [1] + Distance [1] | 51.3 | 122.7 | 107.9 | 137.3 | 104.4 | 51.2 | 103.5 | 81.9 | 124.1 | 91.4 | ||
| 4DHT-TBD [9] | 44.3 | 106.3 | 77.5 | 120.9 | 88.6 | 42.4 | 108.7 | 81.8 | 117.3 | 88.4 | ||
| 3DHT-TBD [10] | 81.9 | 119 | 105.9 | 143.9 | 113.6 | 53.6 | 118.9 | 122.9 | 142.2 | 107.5 |
| Measurement Rate γ | Probability of Detection and Survival | Covariance of Systematic Error | Covariance of Measuring Error (m,°) | Number of Clutter Per Square (1/m2) | |
|---|---|---|---|---|---|
| Scenario 1 | 2 | [0.99, 0.99] | 10 | [20, 1.17] | 2 × 10−7 |
| Scenario 4 | 1 | [0.99, 0.99] | 50 | [20, 1.17] | 2 × 10−7 |
| Scenario 6 | 2 | [0.99, 0.99] | 50 | [20, 1.17] | 4 × 10−7 |
| Real scenarios 1, 3 | 2 | [0.99, 0.99] | 50 | [20, 1.17] | 2 × 10−7 |
| Real scenario 2 | 2 | [0.99, 0.99] | 50 | [20, 1.17] | 3 × 10−7 |
| Real scenario 4 | 1 | [0.99, 0.99] | 50 | [20, 1.17] | 2 × 10−7 |
| Parameters in the 3DHT-ET-TBD | Parameter values used in the 4DHT | ||
|---|---|---|---|
| Number of bins in X axis | 100 | Number of bins in X axis | 100 |
| Width of bins in X axis (m) | 160 | Width of bins in X axis (m) | 160 |
| Number of bins in Y axis | 100 | Number of bins in Y axis | 100 |
| Width of bins in Y axis (m) | 160 | Width of bins in Y axis (m) | 160 |
| Minimum vote count | 15 | Minimum vote count | 15 |
| Length of sliding window | 7 | Length of sliding window | 7 |
| Number of bins in 3D direction | 541 | Number of bins in velocity | 60 |
| Width of bins in velocity (m/s) | 15 | ||
| Number of bins in course | 90 | ||
| Width of bins in course (°) | 4 | ||
References
- Granstrom, K.; Lundquist, C.; Orguner, O. Extended Target Tracking Using a Gaussian-Mixture PHD Filter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3268–3286. [Google Scholar] [CrossRef]
- Orguner, U.; Lundquist, C.; Granström, K. Extended target tracking with a cardinalized probability hypothesis density filter. In Proceedings of the IEEE Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011. [Google Scholar]
- Granstrom, K.; Orguner, U. On Spawning and Combination of Extended/Group Targets Modeled with Random Matrices. IEEE Trans. Signal Process. 2013, 61, 678–692. [Google Scholar] [CrossRef]
- Granström, K.; Antonio, N.; Braca, P. Gamma Gaussian Inverse Wishart Probability Hypothesis Density for Extended Target Tracking Using X-Band Marine Radar Data. IEEE Trans. Geosci. Remote Sens. 2015, 12, 6617–6631. [Google Scholar] [CrossRef]
- Lundquist, C.; Granström, K.; Orguner, U. An Extended Target CPHD Filter and a Gamma Gaussian Inverse Wishart Implementation. IEEE J. Sel. Top. Signal Process. 2013, 7, 472–483. [Google Scholar] [CrossRef]
- Errasti-Alcala, B.; Braca, P. Track before Detect Algorithm for Tracking Extended Targets Applied to Real-World Data of X-Band Marine Radar. In Proceedings of the 2014 17th International Conference, Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014. [Google Scholar]
- Yan, B.; Xu, L.P.; Li, M.Q.; Yan, J.Z.H. A Track-Before-Detect Algorithm Based on Dynamic Programming for Multi-Extended-Targets Detection. IET Signal Process. 2017, 11, 674–686. [Google Scholar] [CrossRef]
- Yan, B.; Xu, L.P.; Yang, Y.; Li, C. Improved plot fusion method for dynamic programming based track before detect algorithm. AEU Int. J. Electron. Commun. 2017, 74, 31–43. [Google Scholar] [CrossRef]
- Sobhani, B.; Zwick, T.; Chiani, M. Target TOA association with the Hough transform in UWB radars. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 743–754. [Google Scholar] [CrossRef]
- Yan, B.; Xu, N.; Zhao, W.B.; Xu, L.P. A Three-Dimensional Hough Transform-Based Track-Before-Detect Technique for Detecting Extended Targets in Strong Clutter Backgrounds. Sensors 2019, 19, 881. [Google Scholar] [CrossRef]
- Zhang, Y.; Ji, H. A robust and fast partitioning algorithm for extended target tracking using a Gaussian inverse Wishart PHD filter. Knowl.-Based Syst. 2016, 95, 125–141. [Google Scholar] [CrossRef]
- Zhang, T.; Wu, R. Affinity Propagation Clustering of Measurements for Multiple Extended Target Tracking. Sensors 2015, 15, 22646–22659. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Wang, C.R.; Zhou, C.L.; Ma, J.W. An improved artificial fish-swarm algorithm and its application in feed-forward neural networks. In Proceedings of the IEEE International Conference on Machine Learning & Cybernetics, Chengdu, China, 15–18 July 2005. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Srinivas, M.; Patnaik, L.M. Genetic algorithms: A survey. Computer 1994, 27, 17–26. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Ji, H. Multi-UAVs tracking target in urban environment by model predictive control and Improved Grey Wolf Optimizer. Aerosp. Sci. Technol. 2016, 55, 131–143. [Google Scholar] [CrossRef]
- Gilholm, K.; Godsill, S.; Maskell, S. Poisson models for extended target and group tracking. Int. Soc. Opt. Photon. 2005, 2005, 59130R. [Google Scholar]
- Koch, J.W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1042–1059. [Google Scholar] [CrossRef]
- Li, M.Q.; Xu, L.P.; Xu, N.; Yan, B. SAR Image Segmentation Based on Improved Grey Wolf Optimization Algorithm and Fuzzy C-Means. Math. Probl. Eng. 2018, 2018, 4576015. [Google Scholar] [CrossRef]
- Komaki, G.M.; Kayvanfar, V. Grey Wolf Optimizer algorithm for the two-stage assembly flow shop scheduling problem with release time. J. Comput. Sci. 2015, 8, 109–120. [Google Scholar] [CrossRef]
- Nadarajah, N. IMM Forward Filtering and Backward Smoothing for Maneuvering Target Tracking. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2673–2678. [Google Scholar] [CrossRef]
- Gupta, A.K.; Nagar, D.K. Matrix Variate Distributions; Chapman and Hall: London, UK, 2000. [Google Scholar]
- Ristic, B.; Vo, B.N.; Clark, D. Performance evaluation of multi-target tracking using the OSPA metric. In Proceedings of the IEEE Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010. [Google Scholar]











| Scenario | Measurement Rate γ | Measurement Noise (m) | Number of Clutter Per Square (1/m2) |
|---|---|---|---|
| Scenario 1 | 2 | 10 | 2 × 10−7 |
| Scenario 2 | 2 | 50 | 2 × 10−7 |
| Scenario 3 | 2 | 100 | 2 × 10−7 |
| Scenario 4 | 1 | 50 | 2 × 10−7 |
| Scenario 5 | 4 | 50 | 2 × 10−7 |
| Scenario 6 | 2 | 50 | 4 × 10−7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, B.; Zhao, X.Y.; Xu, N.; Chen, Y.; Zhao, W.B. A Grey Wolf Optimization-Based Track-Before-Detect Method for Maneuvering Extended Target Detection and Tracking. Sensors 2019, 19, 1577. https://doi.org/10.3390/s19071577
Yan B, Zhao XY, Xu N, Chen Y, Zhao WB. A Grey Wolf Optimization-Based Track-Before-Detect Method for Maneuvering Extended Target Detection and Tracking. Sensors. 2019; 19(7):1577. https://doi.org/10.3390/s19071577
Chicago/Turabian StyleYan, Bo, Xu Yang Zhao, Na Xu, Yu Chen, and Wen Bo Zhao. 2019. "A Grey Wolf Optimization-Based Track-Before-Detect Method for Maneuvering Extended Target Detection and Tracking" Sensors 19, no. 7: 1577. https://doi.org/10.3390/s19071577
APA StyleYan, B., Zhao, X. Y., Xu, N., Chen, Y., & Zhao, W. B. (2019). A Grey Wolf Optimization-Based Track-Before-Detect Method for Maneuvering Extended Target Detection and Tracking. Sensors, 19(7), 1577. https://doi.org/10.3390/s19071577