1. Introduction
It is known that the vast majority of all reported road accidents are due to human faults [
1]. Advanced Driving Assistance System (ADAS) has recently been proposed to predict driver’s intent, warn the driver about possible lane departure, and assist lane keeping [
2], and it has been implemented on several vehicles in automobile industry. The reference path and the vehicle position can be determined from the maps created by geographic information system (GIS); however, the path and position accuracy often suffers from map resolution, data availability, and real-time update limitations. An on-board vision-based lane keeping system is therefore necessary to generate a reference path, obtain accurate vehicle position relative to the lane, and control the vehicle safely in a desired path.
A recent review summarized most vision-based lane detection methods that share three common steps [
3]: (1) bird’s eye view transformation by inverse perspective mapping [
4,
5], (2) lane feature detection by edge-based [
6,
7,
8] or color-based methods [
9], and (3) lane fitting by random sample consensus (RANSAC) combined with least-square line [
10], B-spline [
11], or hyperbola pair fitting [
12] methods. Edge-based methods only rely on intensity information, thus require less computation for real-time applications, which proved to be key to cost-effective, autonomous vehicles in goods delivery. Lane fitting by the random sample consensus combined with parabola pair is considered the most applicable. Lane controllers can be designed based on nonholonomic kinematic or dynamic models. A proportional–integral–derivative (PID) steering controller [
13] and a pure pursuit steering controller [
14,
15] have been proposed to determine vehicle steering angle to maintain safe driving in a lane. The above studies require on-board LIDAR (Light Detection and Ranging) with heavy computation load for lane keeping and radar for adaptive lane control.
In addition to chauffeuring people, another major function for autonomous vehicles is the delivery of goods. It is expected that 80% of all packages will be delivered autonomously in the next decade [
16].
The world’s e-commerce, in particular in USA and China, has doubled in the past 10 years and is expected to double again in the next five [
17]. A cost-effective lane keeping system is therefore key to the development of autonomous delivery systems. This work proposes a lane keeping system for both lane detection and lane control by using only a low-cost image sensor (dashcam) with an efficient processing algorithm for real-time applications. In lane detection, inverse perspective mapping (IPM) followed by edge-based detection and RANSAC parabola fitting are applied to obtain accurate vehicle position relative to the lane center. In lane control, both pure pursuit steering controller based on a nonholonomic kinematic model and proportional-integral speed controller are adopted to maintain the vehicle safely in a desired lane. The image sensor with the processing algorithm is shown to be effective for both lane detection and lane control. The on-board processing time of the algorithm is more efficient than that of the previous work. With the advent of unmanned autonomous vehicles in the delivery market, this work may be one of the latest steps for applications to lower delivery costs of everyday items.
2. Lane Detection by Image Sensor
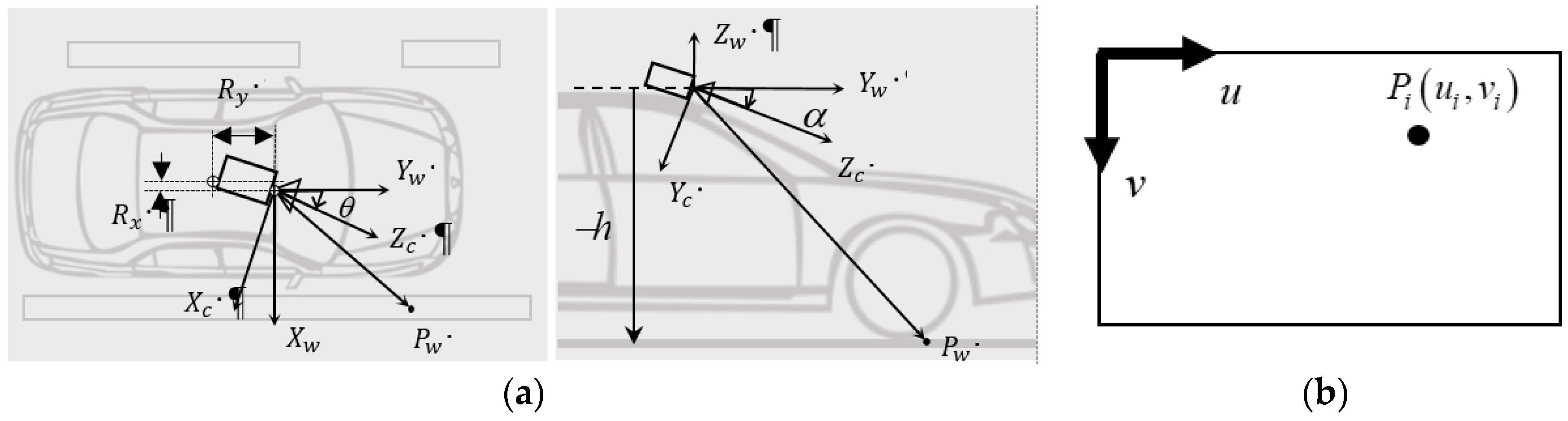
The vision-based lane detection is in three common steps: (1) image transformation from the sensor’s frontal view to bird’s eye view, (2) edge-based lane feature detection, and (3) lane markers regeneration or reconstruction in the processing image. In lane detection, the sensor image from a dashcam first has to be transformed from frontal view into bird’s eye view so that the lane markings on become parallel (assuming constant lane width) for accurate vehicle positioning. Consider the image sensor with camera frame
mounted with pitch angle
, yaw angle
, offset
on a vehicle in the world frame
at height
h above the ground, as shown in
Figure 1a. The transformation from an arbitrary point
in the world frame to the corresponding point
in the image plane as shown in
Figure 1b can be determined by coordinate transformation:
where
and
are the focal length and the image sensor’s optical center, respectively, and
The inverse perspective mapping from the image plane to the ground plane can be obtained by
where
.
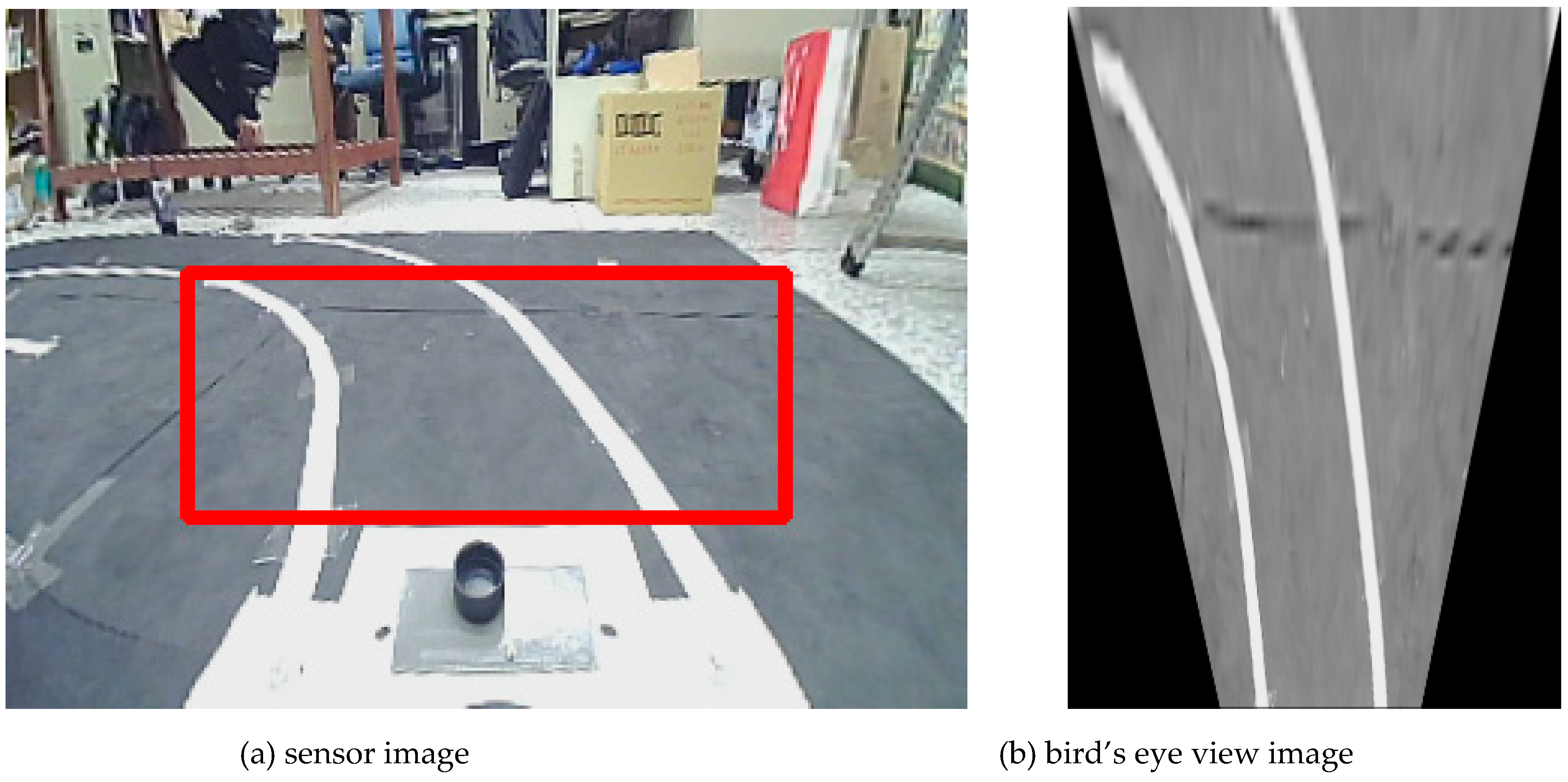
Figure 2a illustrates the inverse perspective mapping where the sensor image is transformed by inverse perspective mapping (IPM) into a bird’s eye view image. After IPM, the lane features such as intensity and geometry of the lane markings are preserved as shown in
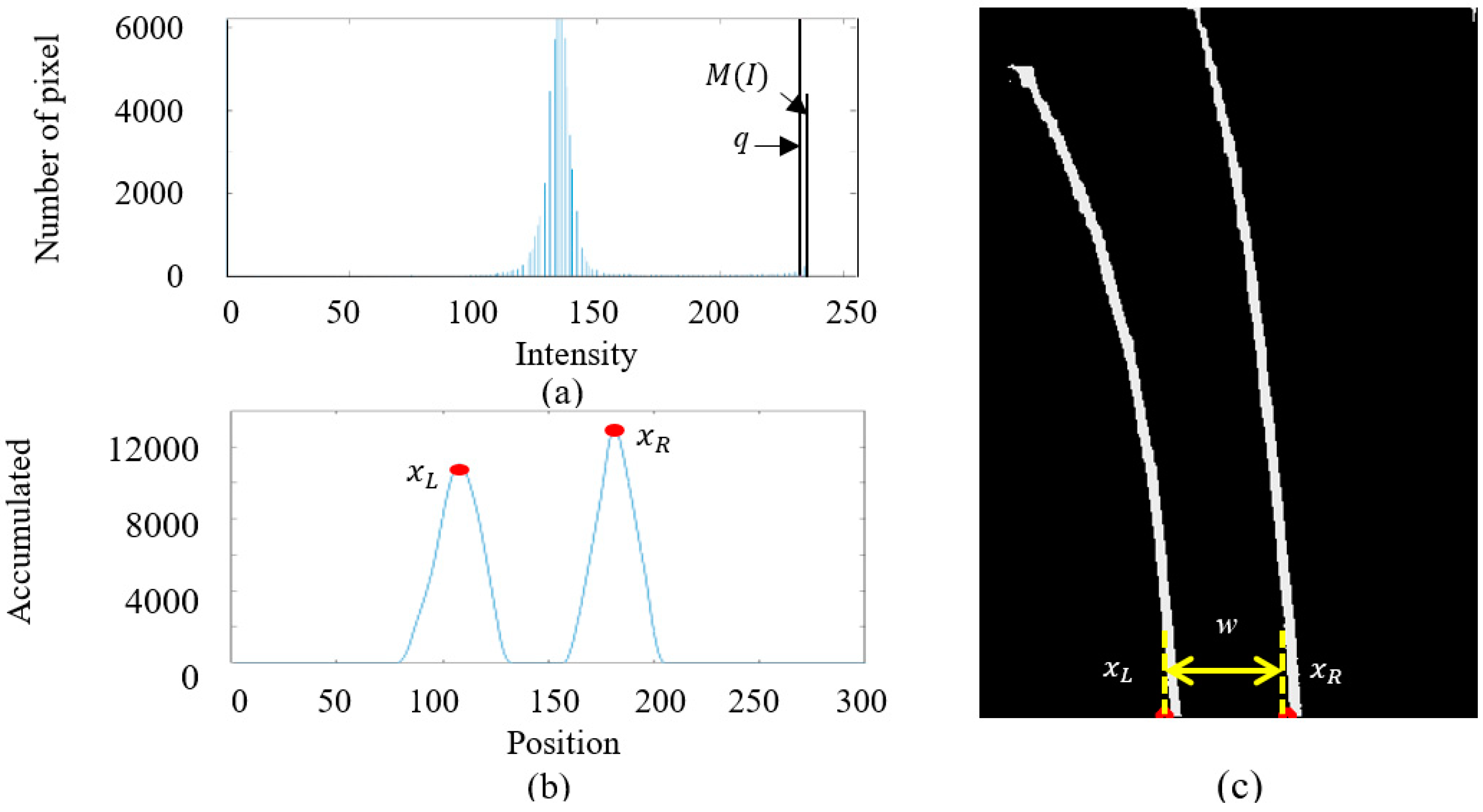
Figure 2b, and they can be applied to locate the lane position by edge-based lane feature detection. The intensity difference between the lane markings and the ground pavement is often so strong that the IPM image can be converted to binary grayscale image and then filtered by an intensity threshold
q:
where
k is a constant to preserve lane markings,
is the peak with the highest intensity value in the histogram of the grayscale image, and
is the grayscale image.
Figure 3a illustrates the histogram of the gray scale IPM image. The column intensity sum of the binary image can then be applied to locate the horizontal position
and
of the left and right lane marking and the lane width
w, as shown in
Figure 3b,c.
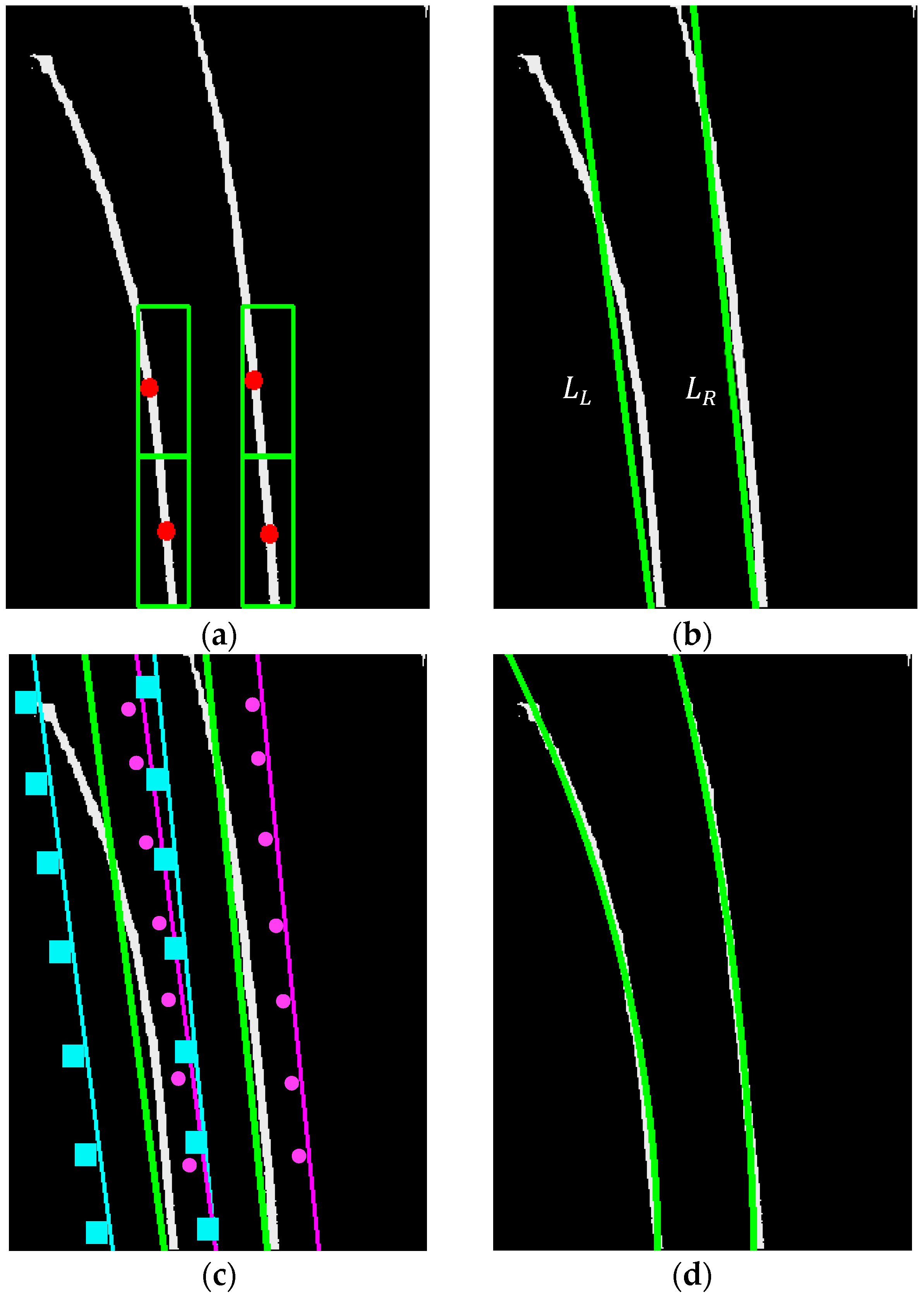
Note that the lane markings close to the vehicle are approximately vertical after the transformation, thus the horizontal position of the left and right lane marking can be determined by the column intensity sum of the threshold image, and two lines
and
passing through
and
, respectively, are the initial guess of the position of the left and right lane marking. Their slope can be determined by the two windows of width
and height
b at horizontal position as shown in
Figure 4a. By the intensity center of each of the two windows, the slope of
and
can be determined as indicated in
Figure 4b.
One of the major challenges in autonomous delivery vehicle is lane detection when making sharp turn. In order to obtain a better position estimate in curve lane markings, random sample consensus (RANSAC) parabola fitting is applied around
and
for lane feature detection. The parabola fitting is to divide each window into sections equally spaced in the y-direction, as shown in
Figure 4c, select randomly one point from each section to define parabola geometry by the least square method, and calculate the accumulated intensity value of the parabola. By use of the central limit theorem, a parabola can be estimated accurately as shown in
Figure 4d. The highest accumulated intensity value in each window can be used to locate the position of each lane markings. Accurate vehicle position with respect to the lane center is necessary for lane control to minimize the cross-track error and keep the vehicle driving safely in the desired lane. The model assumes the lane markings to be parallel is applied to obtain the lane center position. The accurate vehicle position relative to the lane center can then be easily obtained by considering the offset
of the image sensor from the vehicle center.
3. Lane Control by Image Sensor
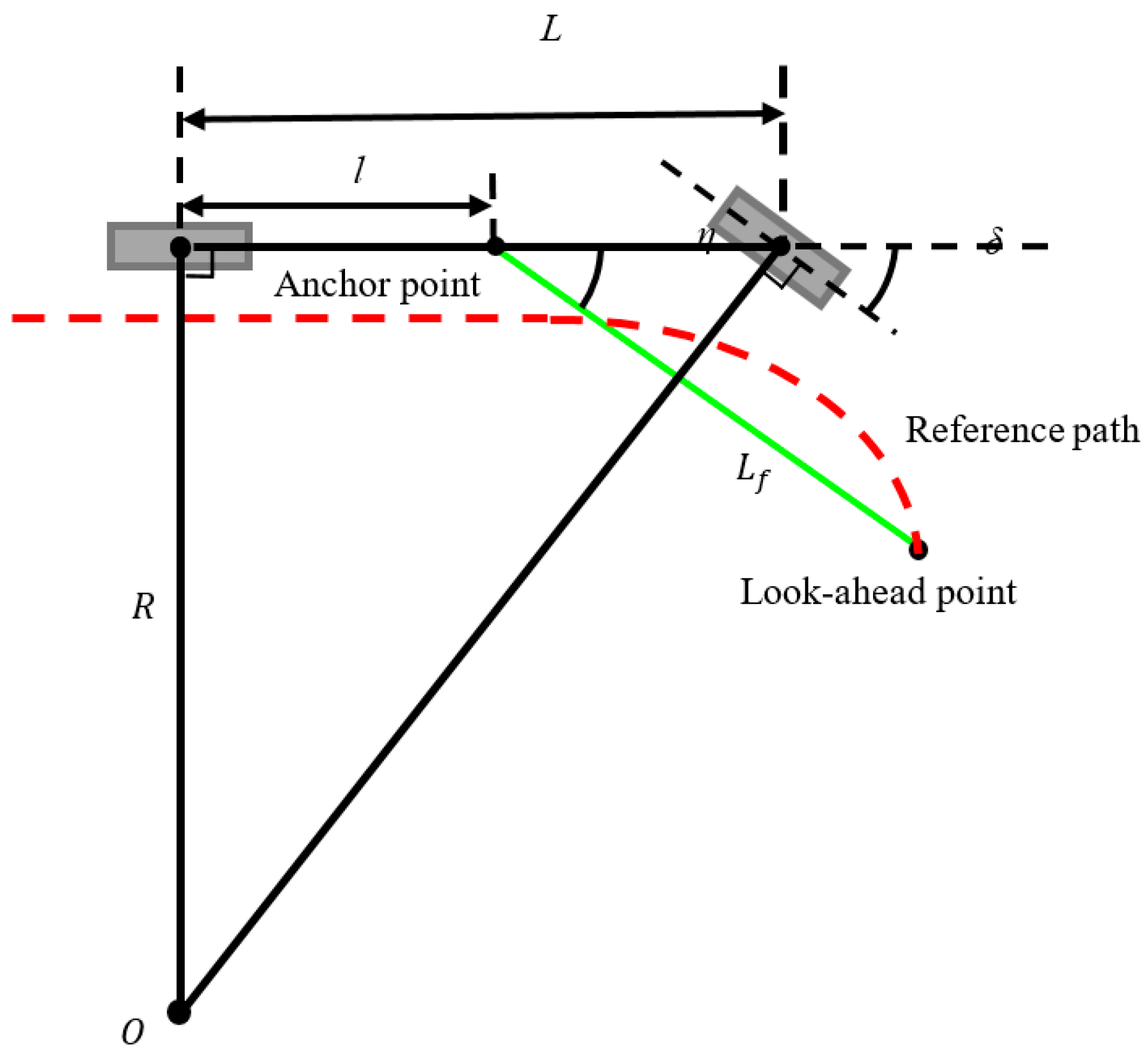
A pure pursuit steering controller and a PI speed controller were applied to keep the vehicle driving safely along the detected lane center at a desired velocity. The former controller calculates a kinematically feasible path for vehicle to maneuver from its current position to goal position. This is used for most vehicles with no universal wheels installed. The latter controller allows the vehicle to follow the calculated curve path, and classical PI control was adopted for acceptable control performance with low or no computation loading. The graphical description of a pure pursuit controller based on a nonholonomic kinematic model [
18] is shown in
Figure 5, where
L is the vehicle wheelbase,
l is the distance from the rear axle to the forward anchor point defined as the center of the vehicle,
is the forward drive look-ahead distance, and
is the heading of the look-ahead point (constrained to the reference path) from the forward anchor point with respect to the vehicle heading. In steering control, the steering angle
can be determined by
, where
R is the distance from the instantaneous rotation center
O to the rear axle,
. The forward drive look-ahead distance
is dependent on the command velocity for stability. Under high velocity conditions, larger
is required in order to maintain the system stability and determine a more feasible
for the nonholonomic kinematic model. In speed control, a classical PI controller was adopted without the derivative (D) term for closed loop system stability:
where
u is the nondimensional speed control signal,
and
are the proportional and integral gains, respectively,
is the command velocity, and
is the vehicle velocity. The time step
is identified according to the update rate of the state of the vehicle and the computational speed. The proportional and integral gains
and
can be determined by extensive testing guided by the parameter space approach of robust control. By applying the parameter space approach, an area in the
plane can be determined for which the desired design specifications such as stability, phase margin limitation, and robustness are satisfied. Through actual experiment, the PI controller parameters best fit all the design specifications are then determined.
4. Experimental Verification
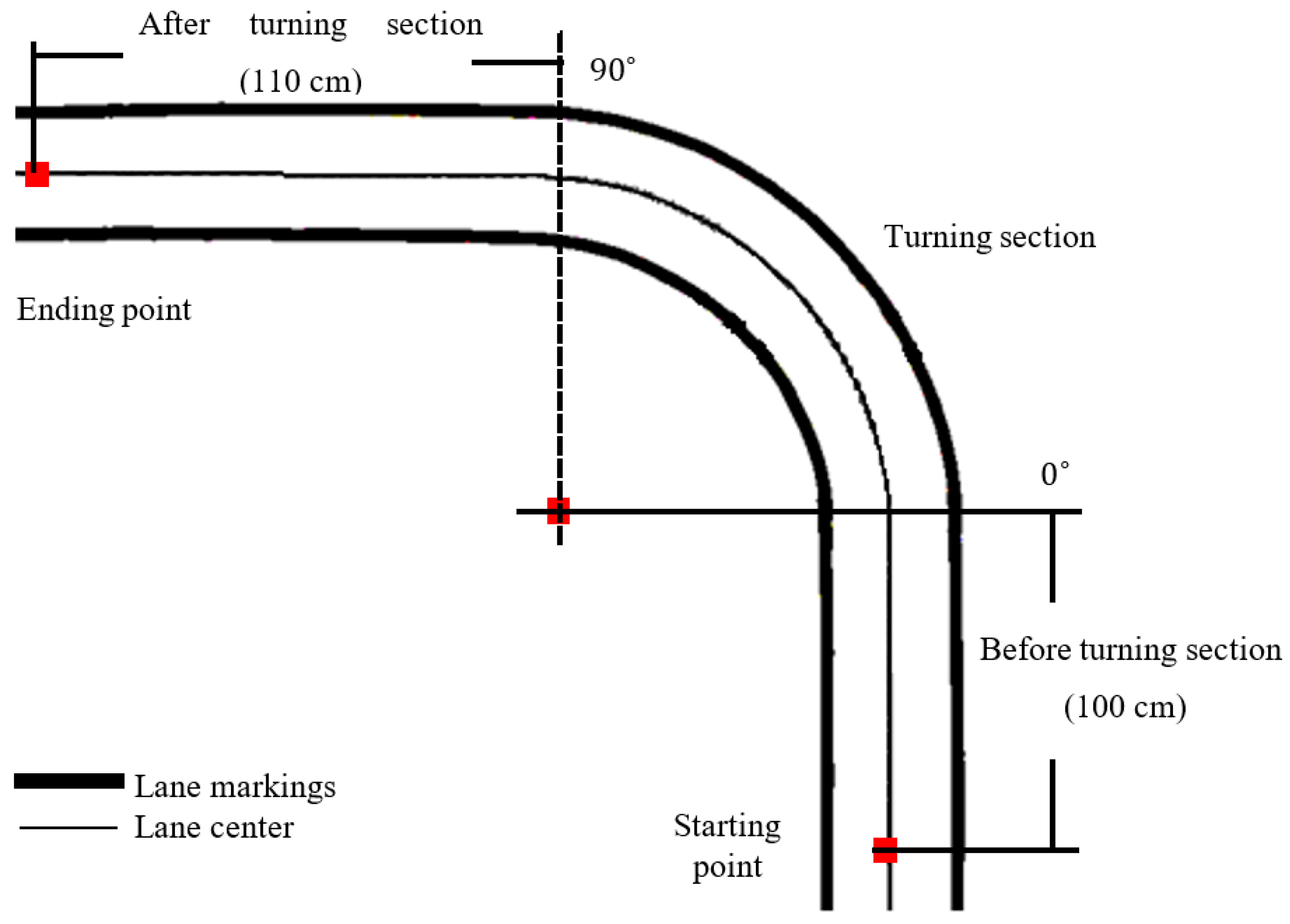
The performance of the image sensor processing algorithm in lane keeping system is verified by a 1/10 scale model car of length 40 cm and width 18 cm maneuvering in straight–curve–straight lane as shown in
Figure 6. The car is equipped with an image sensor (fisheye dashcam), inertial measurement unit, and on-board computer (ARM, 2 GHz). The trajectory of the car during experiment is captured by an overhead camera with
field of view (FOV), 24 frames per second (fps), and 800 × 600 pixel resolution to observe the cross-track error.
In the experiment, an image sensor with
field of view (FOV), 30 frames per second (fps), and 320 × 240 pixel resolution is mounted on the car at height
cm above the ground plane; yaw angle
, pitch angle
, and offset
cm from the vehicle center. After camera calibration, the focal length
is (189.926, 256.917) pixels, while the camera optical center
is (160.717, 120.688) pixels. Most lane markings belong to a region of interest (ROI) of 260 pixel width and 85 pixel height with the position of the top left corner (30, 90) in the image sensor, as shown in
Figure 2a. The image in ROI is then transformed to the bird’s eye view image (300 × 400 pixel) and converted to grayscale as shown in
Figure 2b. The intensity histogram of the grayscale IPM image is calculated with the peak marking the highest intensity
as shown in
Figure 3a. According to the testing results,
is adopted to obtain the best filtering performance by Equation (5). The column intensity sum of the binary image can then be applied to locate the horizontal position
and
of the left and right lane marking and the lane width
as shown in
Figure 3b,c. With the two windows of width
and height 60 pixels at the bottom of each of the two lane markings as shown in
Figure 4a, the slope of each lane marking can be determined as shown in
Figure 4b. These slopes are applied to obtain two windows of equal width for spline fitting as shown in
Figure 4c. Each window is divided into 10 sections and the number of iterations of the spline fitting is set of 30 to obtain the best performance on the on-board computer, as shown in
Figure 4d. Based on the parallel lane model, the lane center can therefore be obtained.
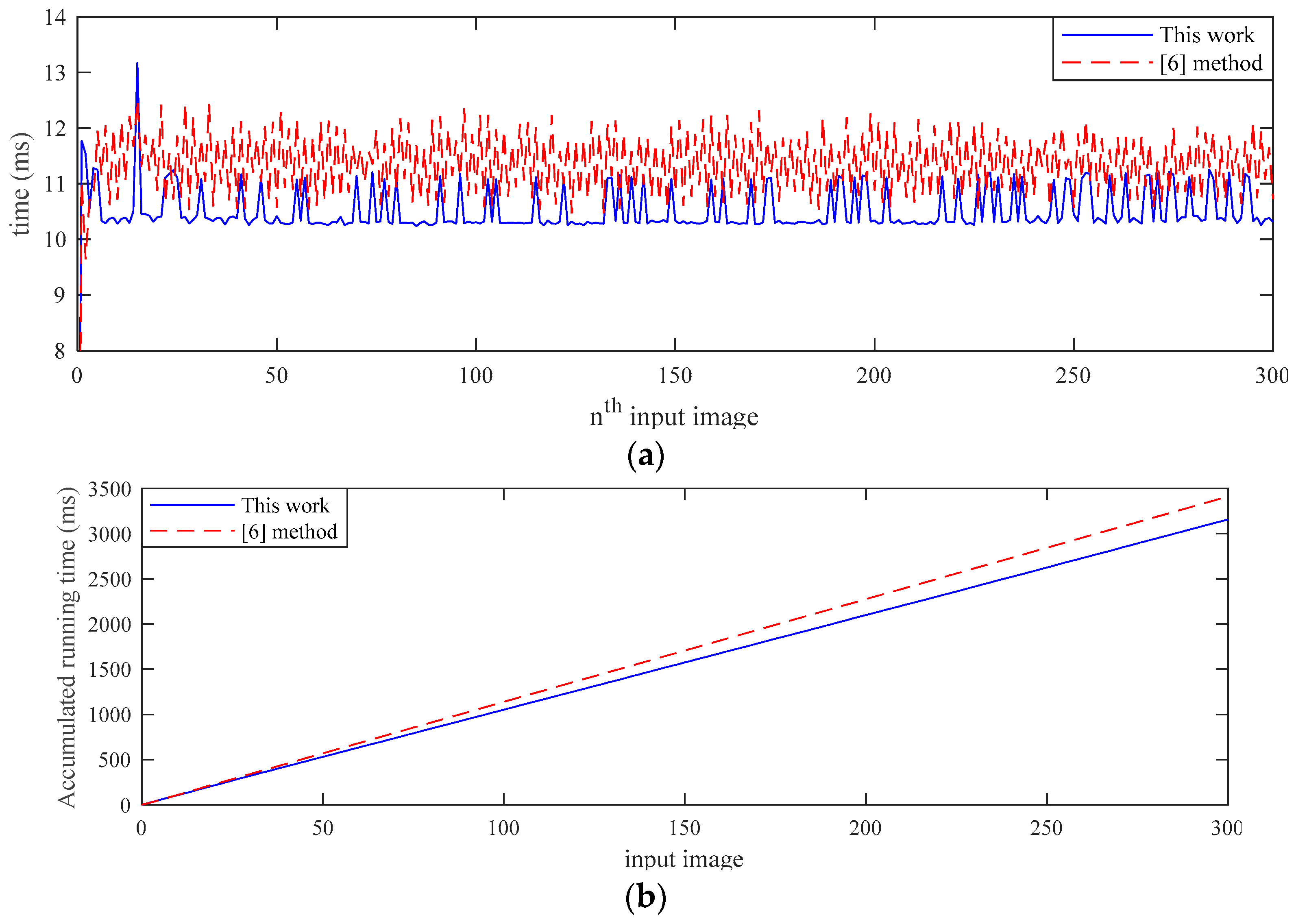
The efficiency of the lane detection algorithm is shown in
Figure 7a. In a series of 300 captured images of a typical maneuver in a straight lane, the computation time in lane detection by the on-board CPU (2 GHz) is in the range of 10.4 to 11.2 ms. By comparison, the computation time by using the method in [
6] is 11.5 to 12.2 ms. The algorithm in this work is shown more efficient in all of the 300 images in lane detection. In addition, the algorithm remains applicable to curve lane, while the method in [
6] is otherwise for its limitation when using Hough transform.
Figure 7b illustrates the accumulated time of processing the 300 images during vehicle motion of ~10 s. The algorithm is shown to shave 0.5 s of computation time in lane detection, and such saving is critical to the development of autonomous delivery systems.
The lane control experiment is also performed on the 1/10 scale model car. For the pure pursuit controller, the vehicle wheel base is
cm and the distance from the rear axle to the forward anchor point is
cm. The forward drive look-ahead distance
is dependent upon the command velocity
r to overcome the stability issue. According to the characteristics of the nonholonomic kinematic model, the relationship between
and
r in the experiment is
For speed control, the PI controller parameters and are determined through the parameter space by experiment: and . For the integration, the time step is set at 5 ms to achieve the best performance.
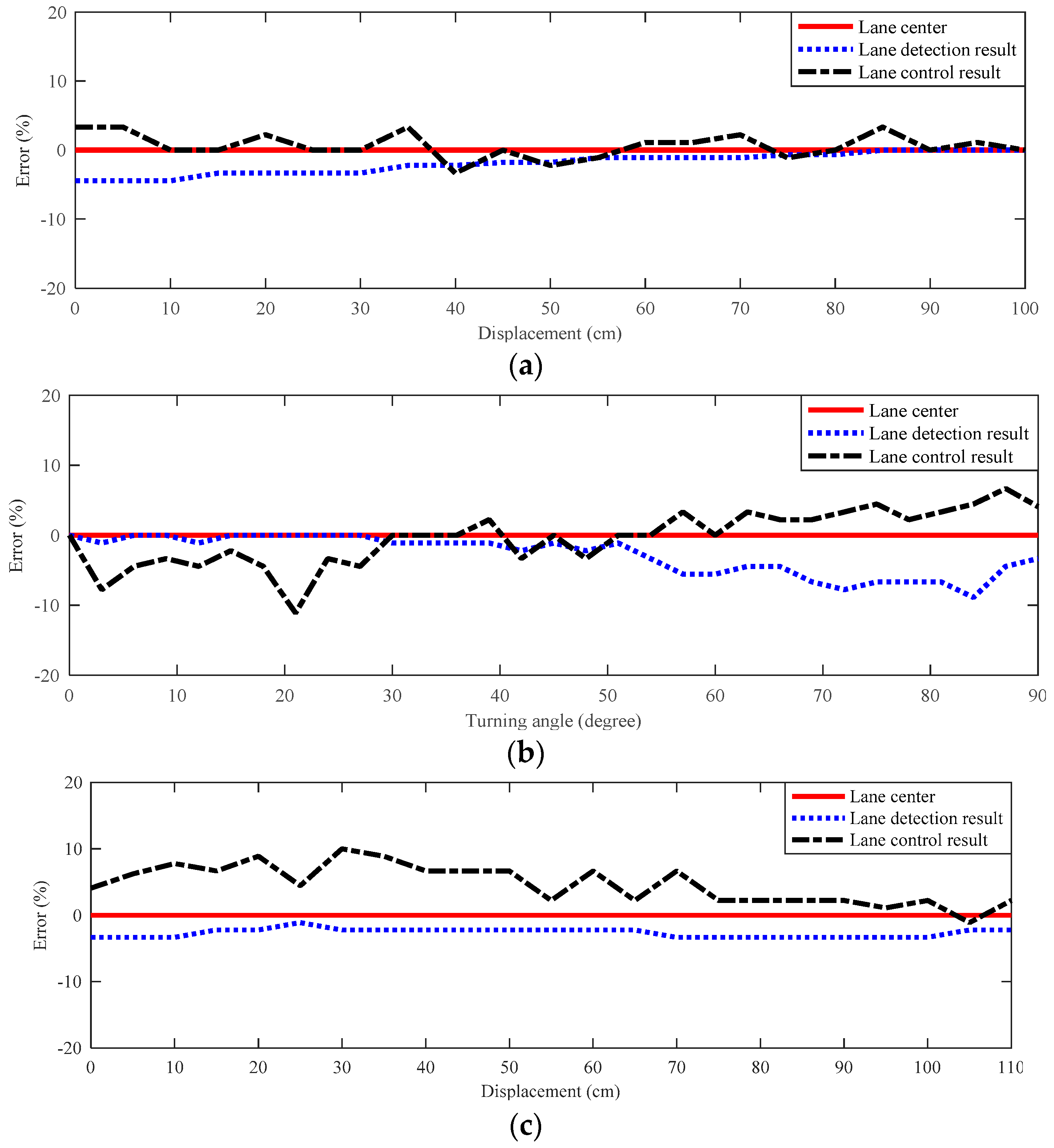
The experiments were conducted with the model car maneuvering at a speed of 1 m/s in a straight–curve–straight lane (radius 99 cm) and lane width 37 cm. The vehicle speed is set at high enough to generate ~1G centrifugal acceleration during the turning section to simulate real-world vehicle operation. The experiment results for lane detection and lane control are shown in
Figure 8, where the solid line represents the real lane center, the dotted line the lane control results, and the dash line the lane detection result. The error percentage is defined by the ratio of deviation over the lane width. Since the width of the lane markings in the experiment is 35 cm, the lane detection error is expected to be within
cm (
). As for cross-track error, the maximum tolerable cross-track error is
cm (
), which is the maximum offset of the vehicle from the lane center without crossing the lane markings. The average lane detection error and maximum cross-track error in these three sections are 2.54%, 3.37%, 4.41%, and −4.44%, −8.89%, −4.08%, respectively. Due to the small steering angle (
) adjustment is not possible, and there is a slight increase during the turning section. Even if the lane keeping system is capable of detecting the small offset from the lane center and sending a corresponding command to the steering angle during the turning section, the car is still not capable of adjusting its steering angle due to backlash in hardware constraint. However, even under this limitation, the performance of the vision-based lane keeping system can still be clearly indicated by the maximum cross-track error in the experiment within 9%.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







