Attitude Measurement for High-Spinning Projectile with a Hollow MEMS IMU Consisting of Multiple Accelerometers and Gyros


Abstract
:1. Introduction
2. The MEMS IMU Configuration Design
3. Sensor Error Modeling and Calibration
3.1. Accelerometer Error Model
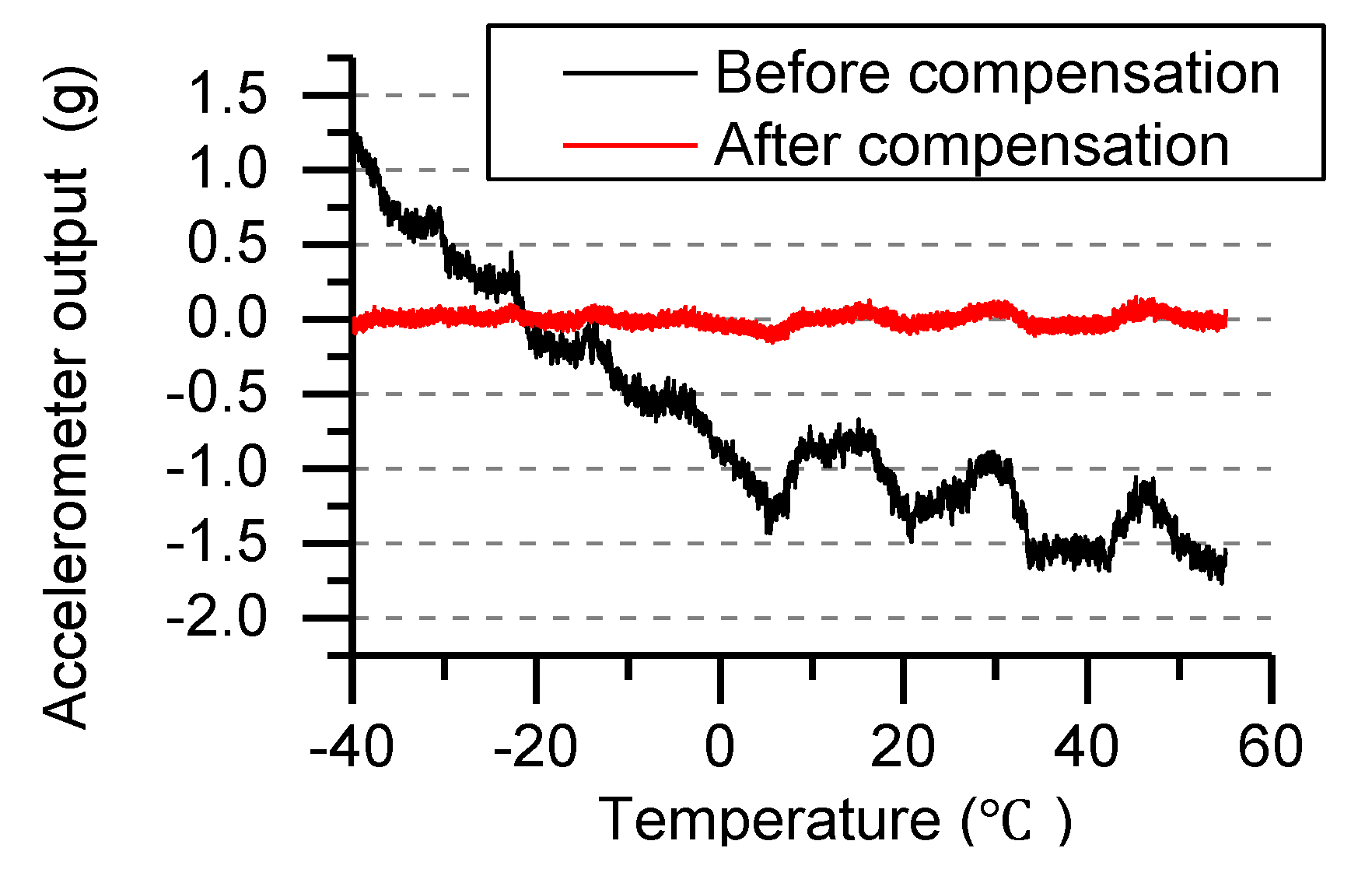
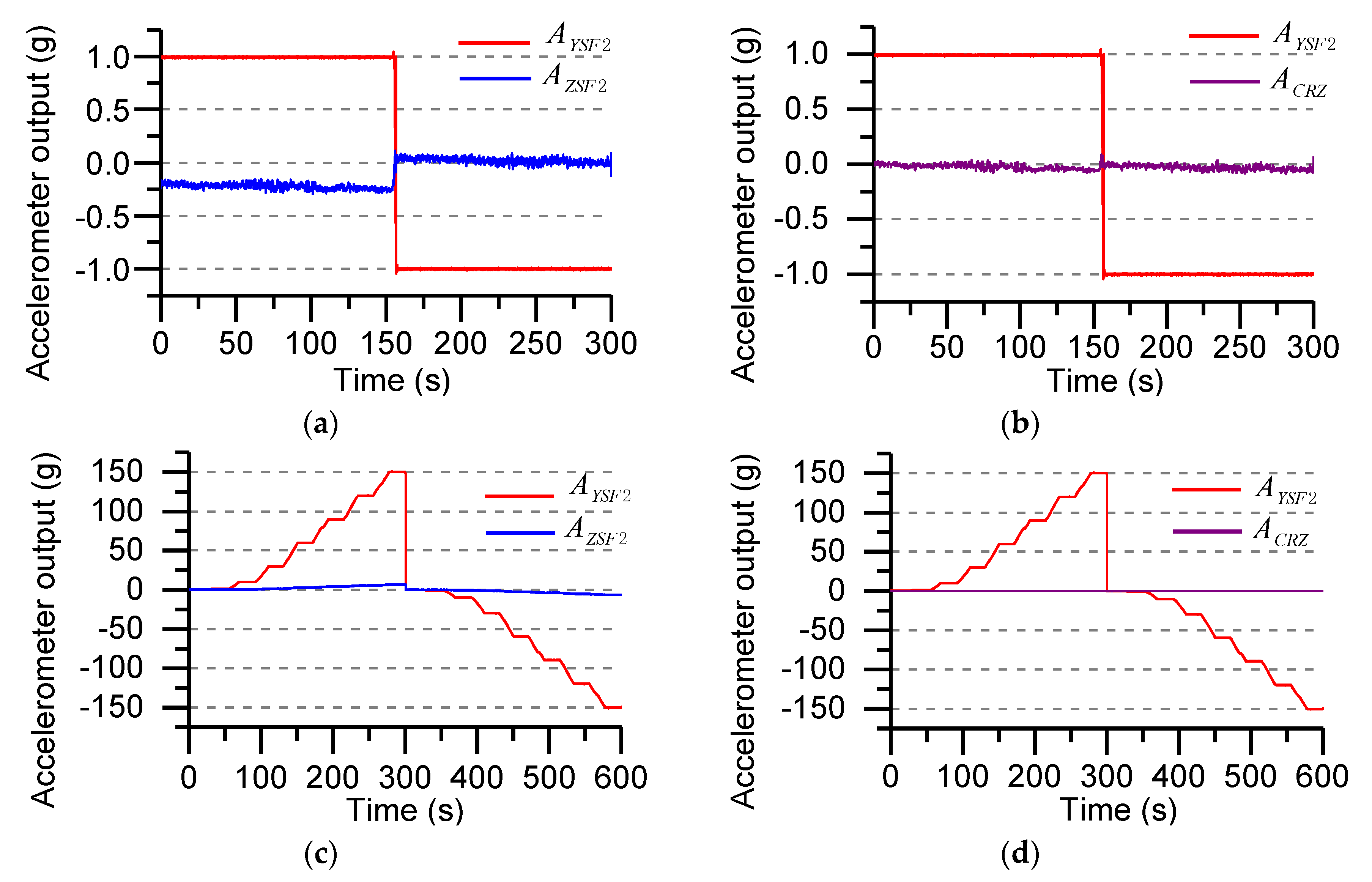
3.2. Accelerometer Calibration
4. Angular Motion Measurement
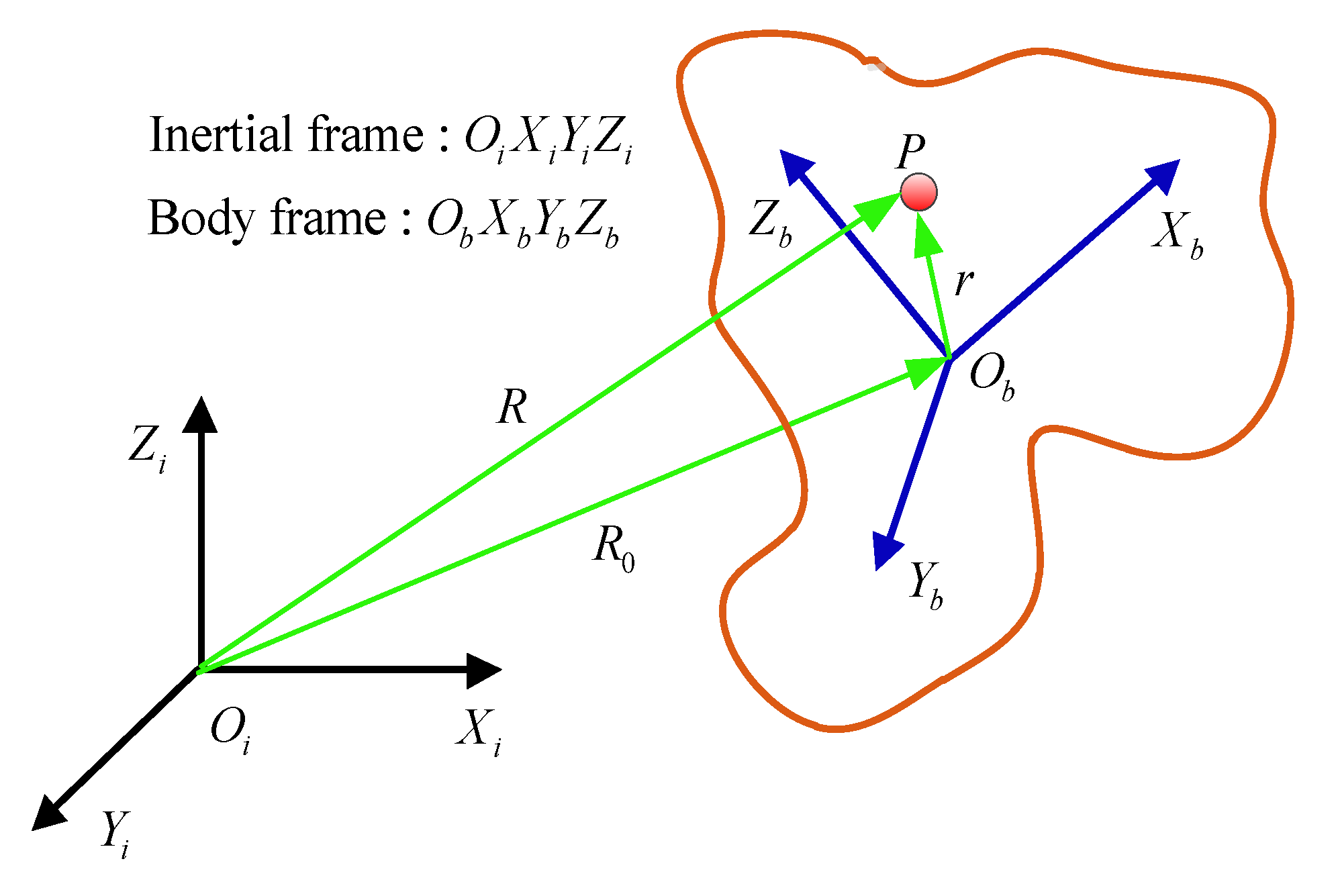
4.1. Output Equation of Accelerometer
4.2. Angular Rate Calculation Based on Gyro-Assisted
5. Angular Motion Estimation Method
5.1. Angular Rate Calculation Model
5.2. Adaptive Unscented Kalman Filter Algorithm
6. Simulation Analysis and Flight Test
6.1. Simulation and Analysis
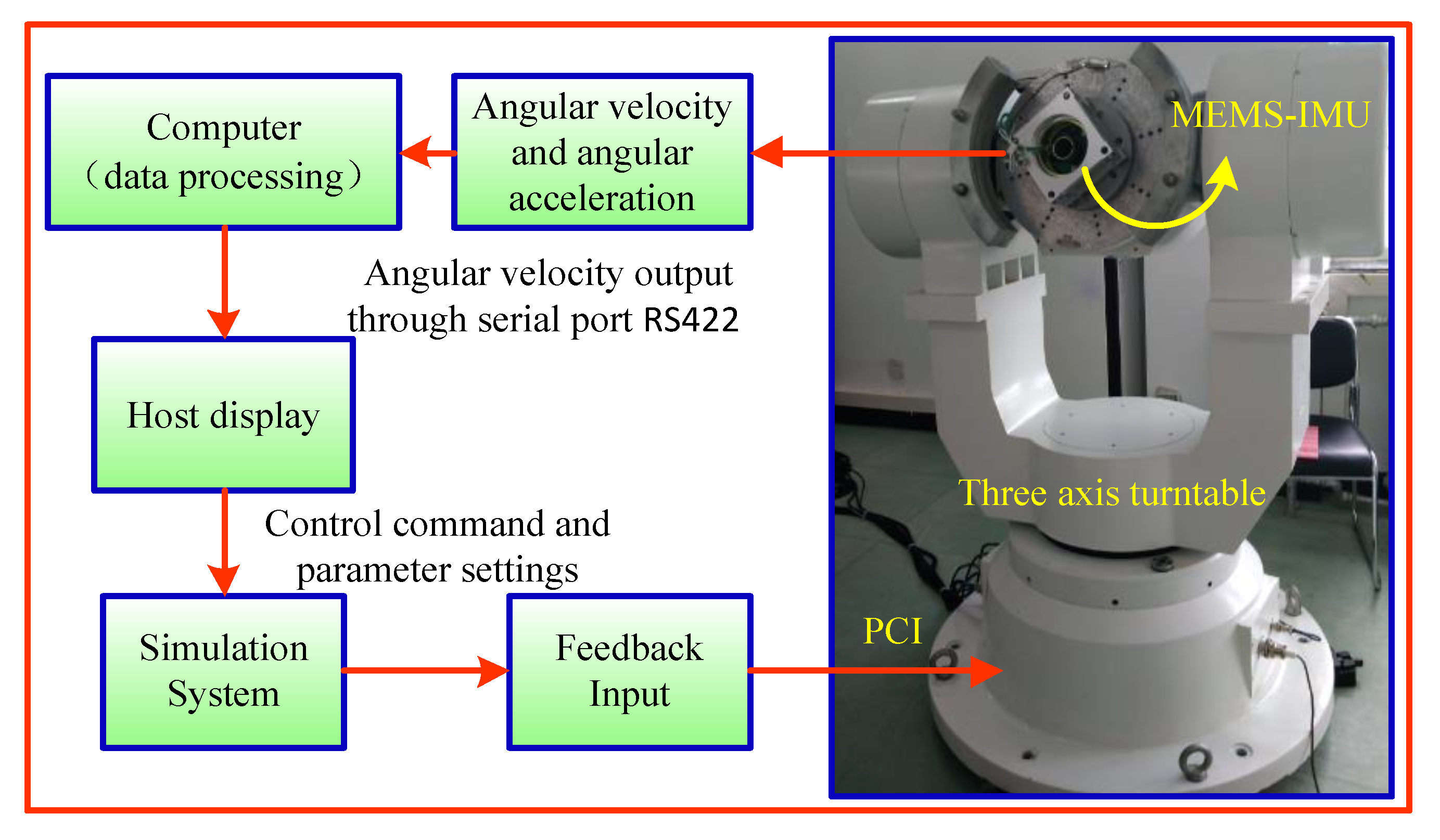
6.2. Semi-Physical Simulation and Analysis
6.3. Flight Test
7. Conclusions
- (1)
- The hollow structure MEMS IMU device meets the installation requirements of the internal space of the rocket projectile, which uses the lever arm effect of the accelerometer to estimate the roll angular rate and solve the problem that the roll angular rate of the projectile cannot be directly measured due to the gyro saturation.
- (2)
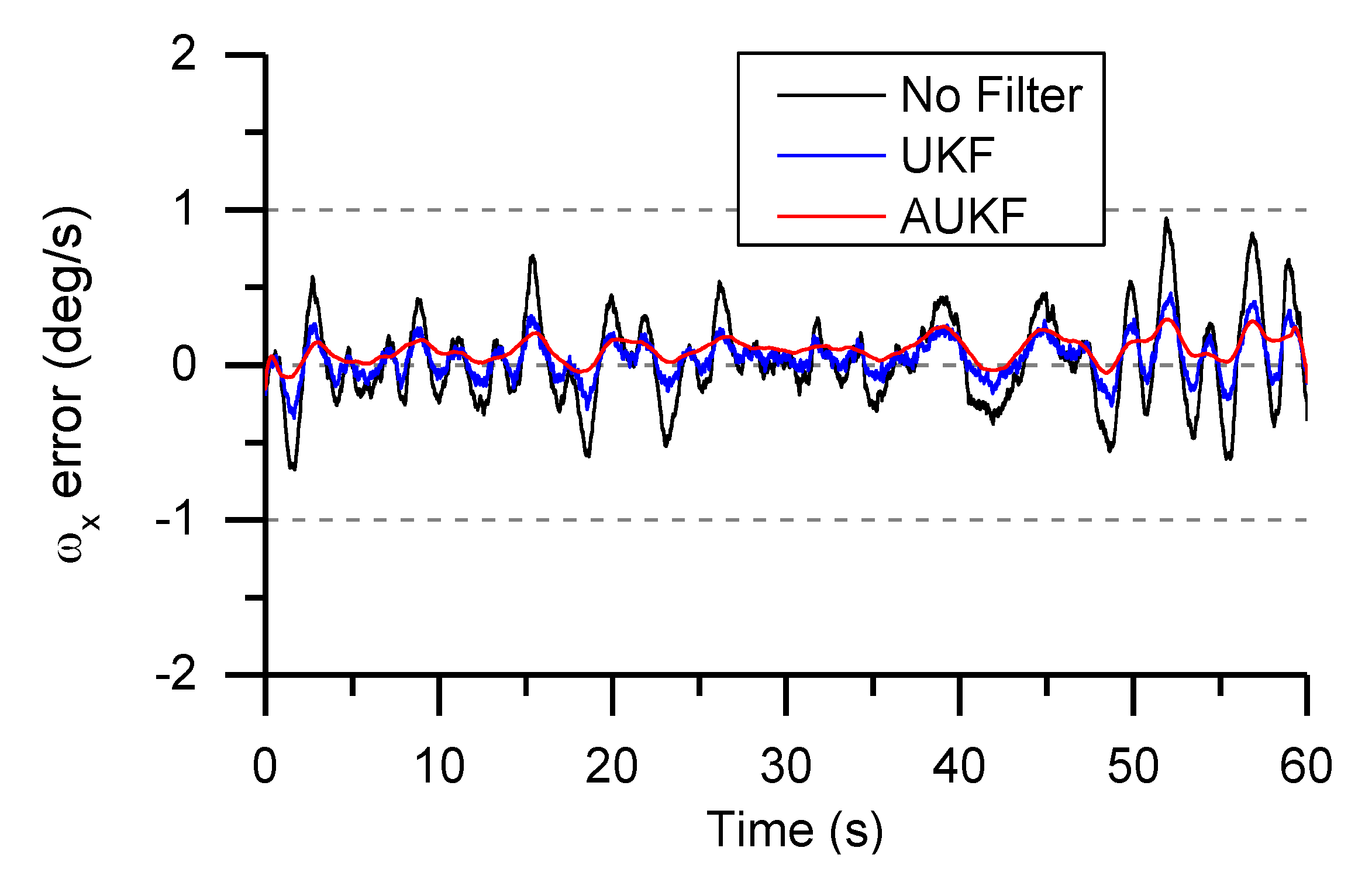
- The AUKF algorithm proposed in this paper is feasible and effective and has a certain suppressive effect on time-varying noise, which can improve the calculation accuracy of angular rate. However, it also has certain limitations. It takes more time and memory to calculate the statistical error mean and covariance. Therefore, it is necessary to simplify the filtering model to reduce computation time and memory.
- (3)
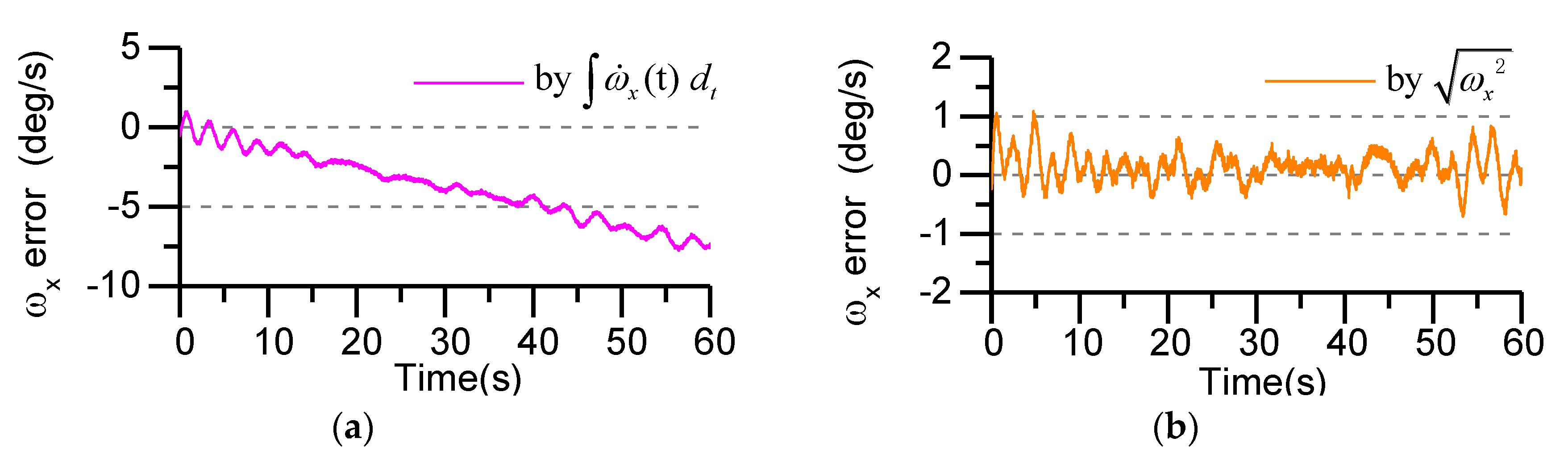
- The roll angular rate of the projectile is obtained by using the square terms of angular rate, and the calculation accuracy is better than the angular rate calculated by the angular acceleration terms.
- (4)
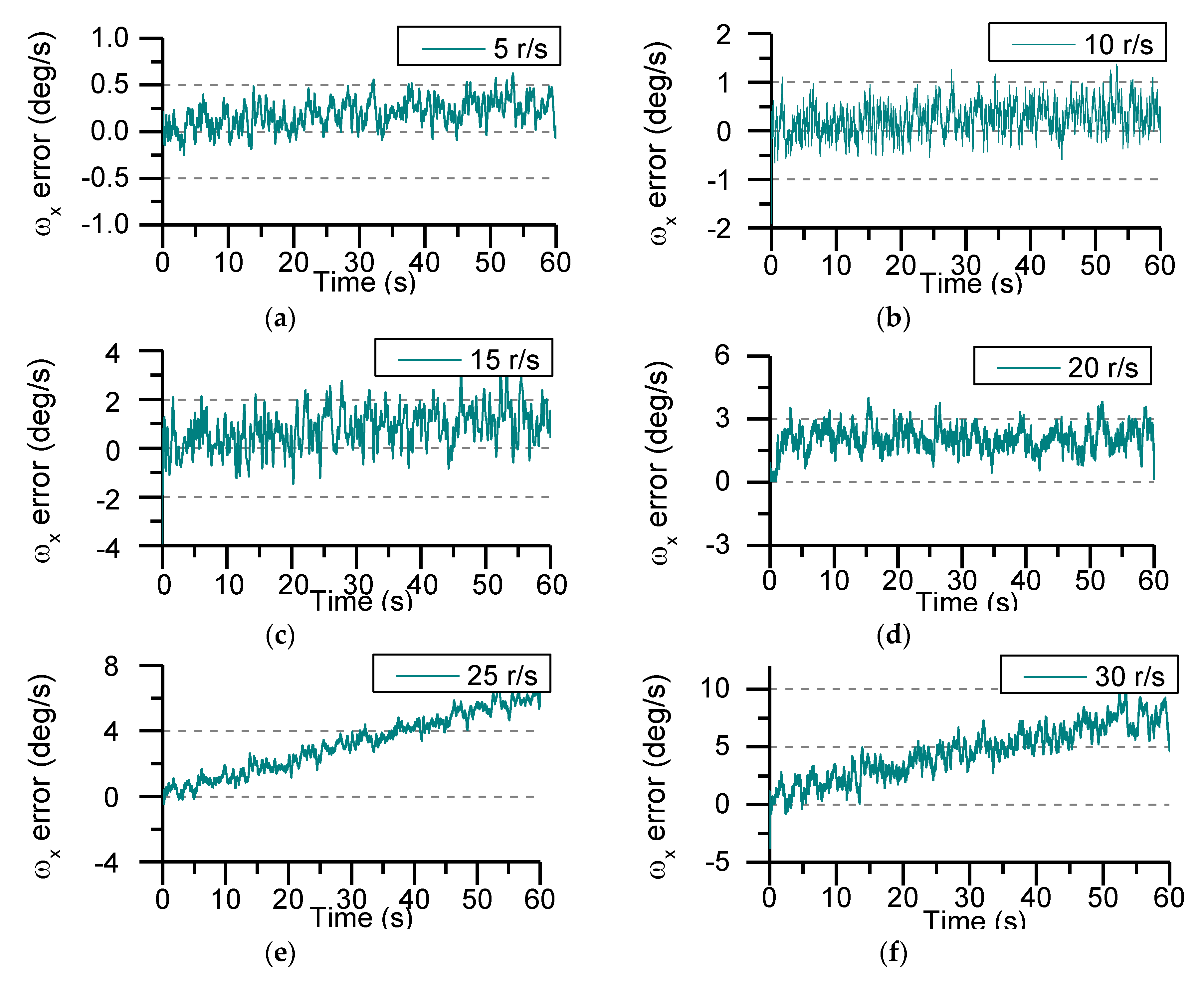
- With the increase of the speed of the projectile and the passage of time, the error of the angular rate is gradually increased. Therefore, the MEMS IMU developed in this paper is suitable for the high-spinning projectile of short-time flight.
- (5)
- The flight test verified that the feasibility of the proposed scheme. The angular velocity calculated by the accelerometer and the direct measurement of the gyroscope differ by 5°/s, and the calculated roll angle error is less than 6°. Due to the strong vibration interference during the launch of the rocket projectile and the vibration interference of the engine working process, the output error of the accelerometer becomes larger, which reduces the calculation accuracy of the angular rate.
Author Contributions
Funding
Conflicts of Interest
References
- Scaysbrook, I.W.; Cooper, S.J.; Whitley, E.T. A miniature, gun-hard MEMS IMU for guided projectiles, rockets and missiles. In Proceedings of the Position Location and Navigation Symposium PLANS 2004, Monterey, CA, USA, 26–29 April 2004; pp. 26–34. [Google Scholar]
- Sheng, H.; Zhang, T. MEMS-Based Low-Cost Strap-Down AHRS Research. Measurement 2015, 59, 63–72. [Google Scholar] [CrossRef]
- Rogne, R.H.; Bryne, T.H.; Fossen, T.I.; Johansen, T.A. MEMS-based Inertial Navigation on Dynamically Positioned Ships: Dead Reckoning. In Proceedings of the 10th IFAC Conference on Control Applications in Marine Systems, Trondheim, Norway, 26–29 September 2004; pp. 139–146. [Google Scholar]
- Al-Rawashdeh, Y.M.; Elshafei, M.; Al-Malki, M.F. In-flight estimation of center of gravity position using all-accelerometers. Sensors 2014, 14, 17567–17585. [Google Scholar] [CrossRef]
- Trimpe, S.; Andrea, R.D. Accelerometer-based tilt estimation of a projectile with only rotational degrees of freedom. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 2630–2636. [Google Scholar]
- Tjhai, C.; Keefe, K.O. Step-size estimation using fusion of multiple wearable inertial sensors. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Trkov, M.; Chen, K.; Yi, J.; Liu, T. Inertial Sensor-Based Slip Detection in Human Walking. IEEE Trans. Autom. Sci. Eng. 2018, 1–13. [Google Scholar] [CrossRef]
- Ahmed, H.; Tahir, M. Improving the accuracy of human body orientation estimation with wearable IMU sensors. IEEE Trans. Instrum. Meas. 2017, 66, 535–542. [Google Scholar] [CrossRef]
- Martinez-Hernandez, U.; Dehghani-Sanij, A.A. Adaptive Bayesian inference system for recognition of walking activities and prediction of gait events using wearable sensors. Neural Netw. 2018, 102, 107–119. [Google Scholar] [CrossRef]
- Baldini, G.; Steri, G.; Dimc, F.; Giuliani, R.; Kamnik, R. Experimental Identification of Smartphones Using Fingerprints of Built-In Micro-Electro Mechanical Systems (MEMS). Sensors 2016, 16, 818. [Google Scholar] [CrossRef] [PubMed]
- Pamadi, K.B.; Ohlmeyer, E.J.; Pepitone, T.R. Assessment of a GPS Guided Spinning Projectile Using an Accelerometer-only IMU. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; pp. 705–717. [Google Scholar]
- Cucci, D.A.; Crespillo, O.G.; Khaghani, M. An analysis of a gyro-free inertial system for INS/GNSS navigation. In Proceedings of the 2016 European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016. [Google Scholar]
- Nilsson, J.O.; Skog, I. Inertial sensor arrays—A literature review. In Proceedings of the European Navigation Conference, Helsinki, Finland, 30 May–2 June 2016. [Google Scholar]
- Skog, I.J.; Nilsson, O.; Handel, P.; Nehorai, A. Inertial sensor arrays, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Signal Process. 2016, 64, 4218–4227. [Google Scholar] [CrossRef]
- Schwaab, M.; Reginya, S.A.; Sikora, A.; Abramov, E.V. Measurement analysis of multiple MEMS sensor array. In Proceedings of the IEEE International Conference on Integrated Navigation System, Saint Petersburg, Russia, 27–29 May 2017. [Google Scholar]
- Wahlström, J.; Skog, I.; Händel, P. Inertial Sensor Array Processing with Motion Models. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 788–793. [Google Scholar]
- Madgwick, S.O.H.; Harrison, A.J.L.; Sharkey, P.M.; Vaidyanathan, R.; Harwin, W.S. Measuring motion with kinematically redundant accelerometer arrays: Theory simulation and implementation. Mechatronics 2013, 23, 518–529. [Google Scholar] [CrossRef]
- Seyed Moosavi, S.; Moaveni, B.; Moshiri, B.; Arvan, M. Auto-Calibration and Fault Detection and Isolation of Skewed Redundant Accelerometers in Measurement While Drilling Systems. Sensors 2018, 18, 702. [Google Scholar] [CrossRef]
- Jafari, M. Optimal redundant sensor configuration for accuracy increasing in space inertial navigation system. Aerosp. Sci. Technol. 2015, 47, 467–472. [Google Scholar] [CrossRef] [Green Version]
- Kaswekar, P.; Wagner, J.F. Sensor fusion based vibration estimation using inertial sensors for a complex lightweight structure. In Proceedings of the IEEE 2015 DGON Inertial Sensors and Systems Symposium (ISS), Karlsruhe, Germany, 22–23 September 2015. [Google Scholar]
- Brooks, I.M. Spatially distributed measurements of platform motion for the correction of ship-based turbulent fluxes. J. Atmos. Ocean. Technol. 2008, 25, 2007–2017. [Google Scholar] [CrossRef]
- Naseri, H.; Homaeinezhad, M.R. Improving measurement quality of a MEMS-based gyro-free inertial navigation system. Sens. Actuators A Phys. 2014, 207, 10–19. [Google Scholar] [CrossRef]
- Onodera, R.; Mimura, N. Stability and Error Analysis of a New 6 DOF Motion Sensor Using Multiple Accelerometers. In Proceedings of the IEEE Sensors Conference, Lecce, Italy, 26–29 October 2008; pp. 752–755. [Google Scholar]
- Tan, C.-W.; Park, S. Design of accelerometer-based inertial navigation systems. IEEE Trans. Instrum. Meas. 2005, 54, 2520–2530. [Google Scholar] [CrossRef]
- Yang, C.K.; Shim, D.S. Best sensor configuration and accommodation rule based on navigation performance for INS with seven inertial sensors. Sensors 2009, 9, 8456–8472. [Google Scholar] [CrossRef]
- Park, S.; Tan, C.-W.; Park, J. A scheme for improving the performance of a gyroscope-free inertial measurement unit. Sens. Actuators A Phys. 2005, 121, 410–420. [Google Scholar] [CrossRef]
- Qin, F.J.; Xu, J.N.; Jiang, S. A New Scheme of Gyroscope Free Inertial Navigation System Using 9 Accelerometers. In Proceedings of the 2009 International Workshop on Intelligent Systems and Applications, Wuhan, China, 23–24 May 2009. [Google Scholar]
- Edwan, E.; Knedlik, S.; Loffeld, O. Constrained angular motion estimation in a gyro free IMU. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 596–610. [Google Scholar] [CrossRef]
- Edwan, E.; Knedlik, S.; Loffeld, O. Angular motion estimation using dynamic models in a gyro-free inertial measurement unit. Sensors 2012, 12, 5310–5327. [Google Scholar] [CrossRef]
- Park, S.; Hong, S.K. Angular rate estimation using a distributed set of accelerometers. Sensors 2011, 11, 10444–10457. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, S.; Yu, S.; Yuan, X.; Liu, S. Design and analysis of gyro-free inertial measurement units with different configurations. Sens. Actuators A Phys. 2014, 214, 175–186. [Google Scholar] [CrossRef]
- Yuan, G.; Yuan, W.; Xue, L.; Xie, J.; Chang, H. Dynamic performance comparison of two kalman filters for rate signal direct modeling and differencing modeling for combining a MEMS gyroscope array to improve accuracy. Sensors 2015, 15, 27590–27610. [Google Scholar] [CrossRef]
- Jiang, C.Y.; Xue, L.; Chang, H.L.; Yuan, G.G.; Yuan, W.Z. Signal processing of MEMS gyroscope arrays to improve accuracy using a 1st order markov for rate signal modeling. Sensors 2012, 12, 1720–1737. [Google Scholar] [CrossRef] [PubMed]
- Schopp, P.; Klingbeil, L.; Peters, C.; Buhmann, A.; Manoli, Y. Sensor Fusion Algorithm and Calibration for a Gyroscope-Free IMU. Procedia Chem. 2009, 1, 1323–1326. [Google Scholar] [CrossRef]
- Shi, Z.; Yang, J.; Yue, P.; Cheng, Z.J. A New Calibration and Compensation Method for Installation Errors of Accelerometers in Gyroscope Free Strap-down Inertial Navigation System. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 924–929. [Google Scholar]
- Wu, Q.Y.; Shan, J.Y.; Ni, S.B. Application of adaptive unscented kalman filter for angular rate calculation in GRSINS. In Proceedings of the 2012 International Conference on Modeling, Identification and Control, Wuhan, China, 24–26 June 2012; pp. 1305–1310. [Google Scholar]
- Wu, Q.Y.; Jia, Q.Z.; Shan, J.Y. Angular rate estimation based on adaptive simplified spherical simplex unscented kalman filter in GFSINS. Aerosp. Eng. 2014, 228, 1375–1388. [Google Scholar]
- Guerrier, S.; Waegli, A.; Skaloud, J. Fault detection and isolation in multiple MEMS IMUs configurations. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2015–2031. [Google Scholar] [CrossRef]
- Sun, W.; Wang, D.X.; Xu, L.W.; Xu, L.L. MEMS-based rotary strapdown inertial navigation system. Measurement 2013, 46, 2585–2596. [Google Scholar] [CrossRef]
- Nie, Q.; Gao, X.Y.; Liu, Z. Research on accuracy improvement of INS with continuous rotation. In Proceedings of the IEEE International Conference on Information and Automation, Zhuhai, China, 22–24 June 2009; pp. 849–853. [Google Scholar]
- Song, N.F.; Cai, Q.Z.; Yang, G.L.; Yin, H.L. Analysis and calibration of the mounting errors between inertial measurement unit and turntable in dual-axis rotational inertial navigation system. Meas. Sci. Technol. 2013, 24, 115002. [Google Scholar] [CrossRef]
- Liu, S.Q.; Zhu, R. System Error Compensation Methodology Based on a Neural Network for a Micromachined Inertial Measurement Unit. Sensors 2016, 16, 175. [Google Scholar] [CrossRef]
- Liu, F.C.; Su, Z.; Li, Q.; Li, C.; Zhao, H. Error Characteristics and Compensation Methods of MIMU with-Non-centroid Configurations. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 4877–4882. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Gyroscope (ADXRS 645) | Gyroscope (ADXRS 642) | Accelerometer (ADXL377) |
|---|---|---|---|
| Range | ±2000°/s | ±300°/s | ±200 g |
| Bias Instability | 100°/h | 20°/h | ±12 mg |
| Non-linearity | 0.1% of FS | 0.01% of FS | ±0.5% |
| Noise Density | 0.25°/s/√Hz | 0.02°/s/√Hz | 2.7 mg/√Hz |
| Operating Voltage | 5 V | 5 V | 3 V |
| Bandwidth | 2000 Hz | 2000 Hz | 1300 Hz |
| Rotation Speed (r/s) | Mean Absolute Deviation (°/s) | Root-mean-square Error |
|---|---|---|
| 5 | 0.1948 | 5.1564 × 10−5 |
| 10 | 0.2521 | 2.2582 × 10−4 |
| 15 | 0.8136 | 1.6326 × 10−4 |
| 20 | 2.1147 | 7.1774 × 10−3 |
| 25 | 3.2317 | 7.8361 × 10−2 |
| 30 | 4.5782 | 1.2682 × 10−2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Su, Z.; Zhao, H.; Li, Q.; Li, C. Attitude Measurement for High-Spinning Projectile with a Hollow MEMS IMU Consisting of Multiple Accelerometers and Gyros. Sensors 2019, 19, 1799. https://doi.org/10.3390/s19081799
Liu F, Su Z, Zhao H, Li Q, Li C. Attitude Measurement for High-Spinning Projectile with a Hollow MEMS IMU Consisting of Multiple Accelerometers and Gyros. Sensors. 2019; 19(8):1799. https://doi.org/10.3390/s19081799
Chicago/Turabian StyleLiu, Fuchao, Zhong Su, Hui Zhao, Qing Li, and Chao Li. 2019. "Attitude Measurement for High-Spinning Projectile with a Hollow MEMS IMU Consisting of Multiple Accelerometers and Gyros" Sensors 19, no. 8: 1799. https://doi.org/10.3390/s19081799
APA StyleLiu, F., Su, Z., Zhao, H., Li, Q., & Li, C. (2019). Attitude Measurement for High-Spinning Projectile with a Hollow MEMS IMU Consisting of Multiple Accelerometers and Gyros. Sensors, 19(8), 1799. https://doi.org/10.3390/s19081799