Background and Recent Advances in the Locata Terrestrial Positioning and Timing Technology



Abstract
:1. Introduction
2. Locata Core Technologies
2.1. LocataNet
2.2. TimeLoc
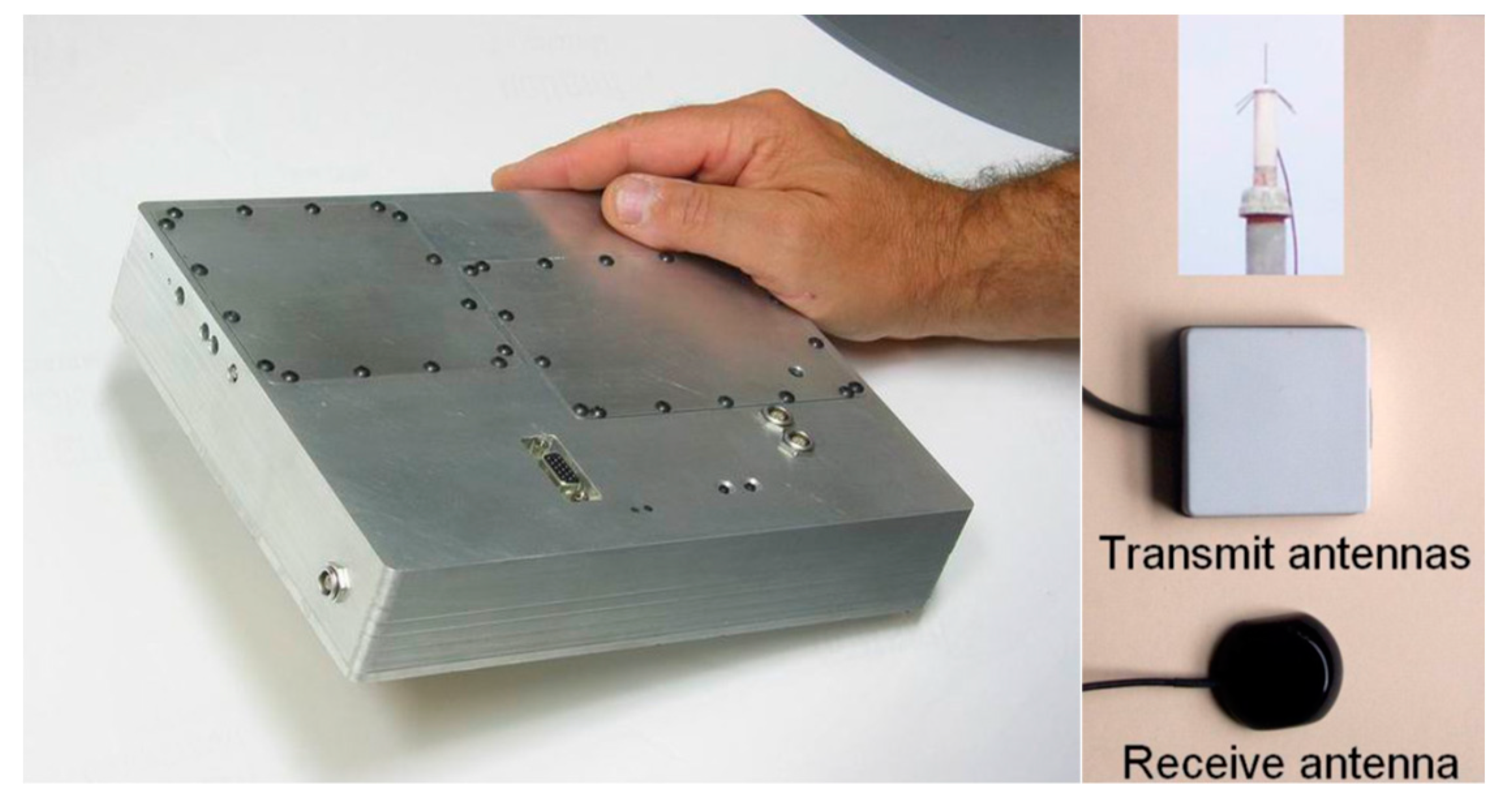
2.3. LocataLite
2.4. Locata Rover
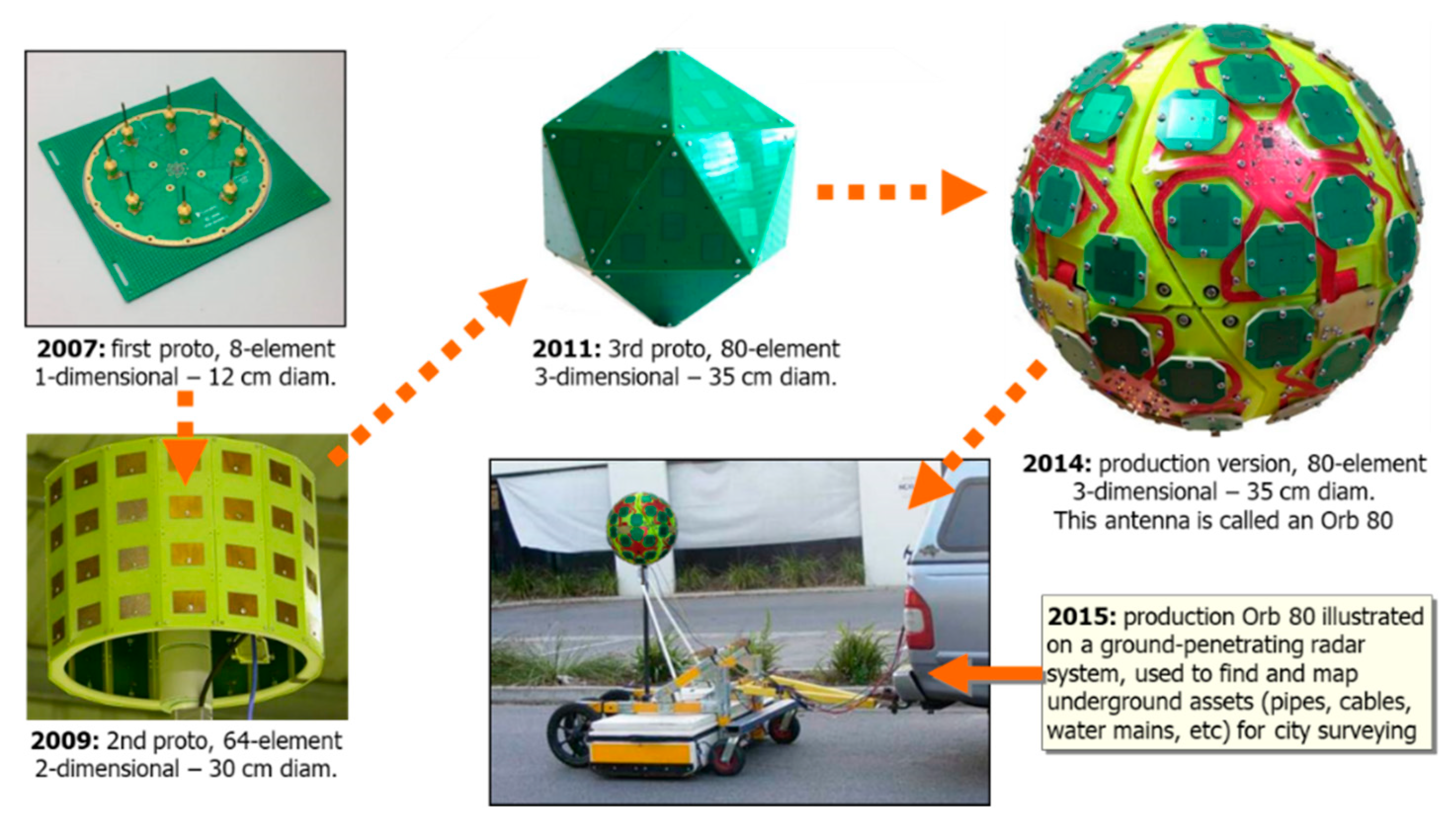
2.5. VRay Antenna
3. Locata Development History and Mathematical Models
3.1. Locata’s Prototype and Second Generation System
3.2. Locata Mathematical Model
3.2.1. Locata Measurements
3.2.2. Precise Positioning Methods
3.2.3. Locata Integrated with GNSS/INS
3.2.4. Measurement Errors and Biases
4. Locata Applications
4.1. Open-Cut Mining
4.2. Deformation Monitoring
4.3. Flight Tests
4.4. Marine Navigation
4.5. Indoor/Outdoor Vehicle Tracking
4.6. Locata Working Independently, or in Combination with GNSS/INS
5. Challenging Issues for Locata
5.1. RF Interference
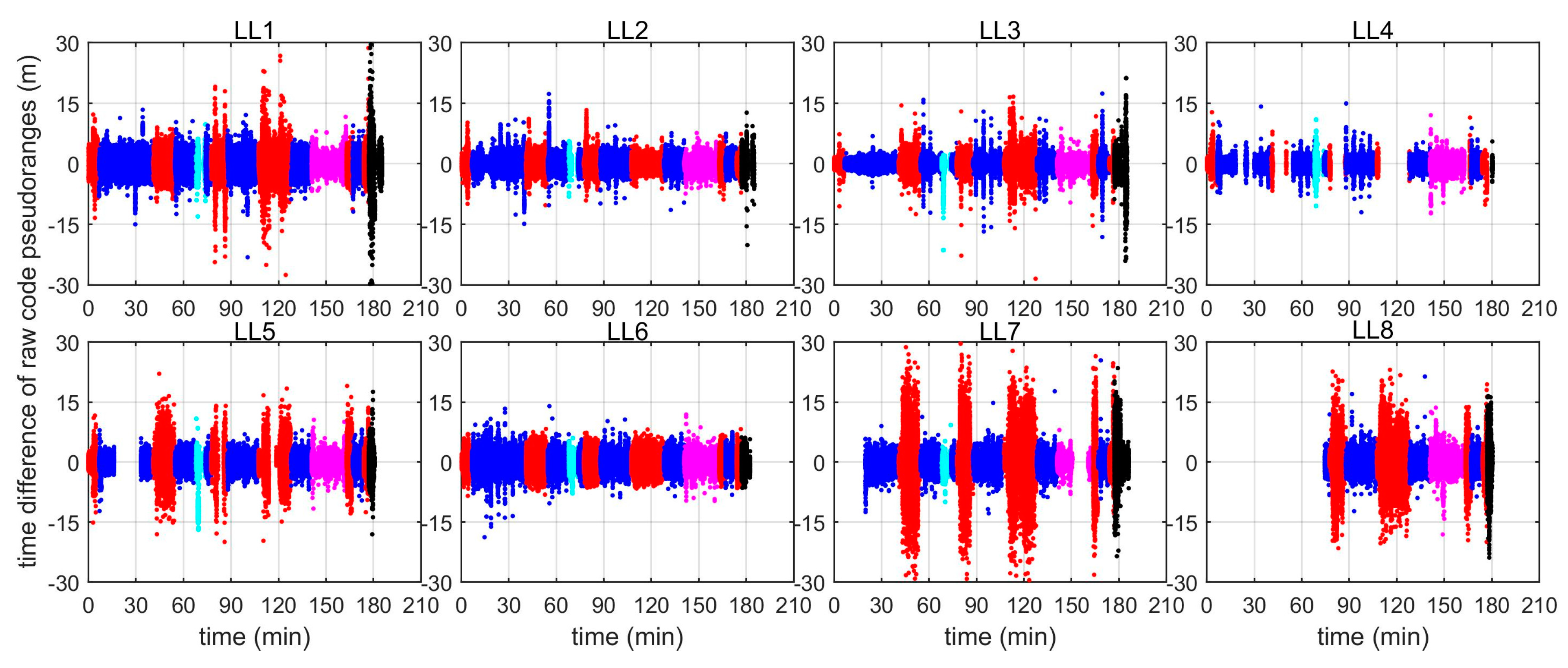
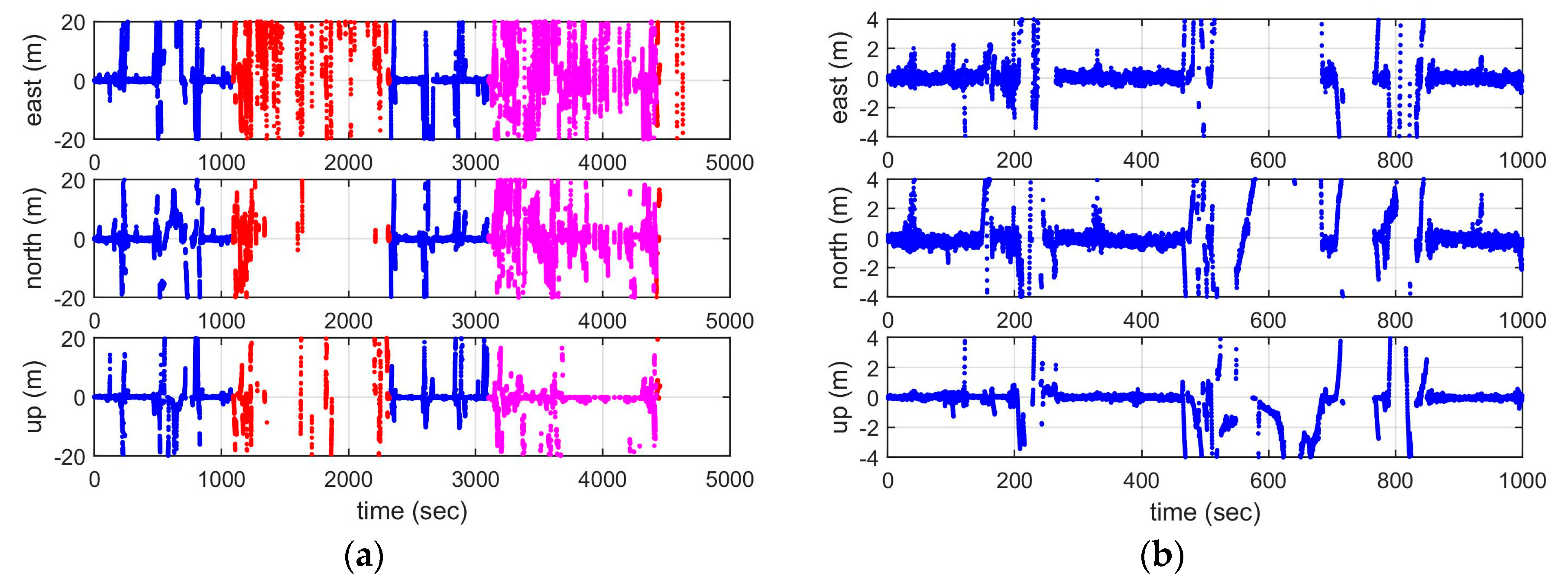
5.2. Raw Data Analysis of a LocataNet
5.3. Locata’s Challenging Issues
- (1)
- Signal characteristics uncertainty. A precise mathematical model (including both functional and stochastic model) for Locata measurements is crucial in precise positioning. However, most existing studies focus on refining the functional model. Due to the spatiotemporal complexity of, and limited knowledge regarding, the signal characteristics, the current stochastic model is less well known.
- (2)
- Installation complexity. To configure a LocataNet with spatial diversity, multiple antennas need to be mounted (Figure 2) on a concrete base, and the coordinates of the antennas have to be precisely surveyed [40]. There may be challenges regarding optimal configuration as well as power issues that are associated with a LocataNet installation.
- (3)
- Environmental restrictions. The geometry of the LocataNet is restricted by the application environment. Furthermore, the VDOP is worse than the HDOP, and therefore constraining techniques are required to address the problem of vertical divergence of the positioning solutions.
- (4)
- Extra hardware burden for the users. There is, as of yet, no ASIC design for the Locata Rover electronics, and hence the cost, bulk, and power demands are high.
6. Lessons Learned and Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Lee, H.; Wang, J.; Rizos, C.; Barnes, J.; Tsujii, T.; Soon, B.K.H. Analysis of pseudolite augmentation for GPS airborne applications. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 24–27 September 2002. [Google Scholar]
- Soon, B.; Poh, E.; Barnes, J.; Zhang, J.; Lee, H.; Rizos, C. Flight test results of precision approach and landing augmented by airport pseudolites. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 9–12 September 2003; pp. 2318–2325. [Google Scholar]
- Barnes, J.; Wang, J.; Rizos, C.; Tsujii, T. The performance of a pseudolite-based positioning system for deformation monitoring. In Proceedings of the 2nd Symposium on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21–24 May 2002; pp. 326–327. [Google Scholar]
- Lemaster, E.; Rock, S. Mars exploration using self-calibrating pseudolite arrays. In Proceedings of the 12th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Nashville, TN, USA, 14–17 September 1999; pp. 1549–1558. [Google Scholar]
- Tsujii, T.; Harigae, M.; Barnes, J.; Wang, J.; Rizos, C. A preliminary test of the pseudolite-based inverted GPS positioning in kinematic mode. In Proceedings of the 2nd Symposium on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21–24 May 2002; pp. 442–451. [Google Scholar]
- Tsujii, T.; Harigae, M.; Barnes, J.; Wang, J.; Rizos, C. Experiments of inverted pseudolite positioning for airship-based GPS augmentation system. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 24–27 September 2002; pp. 1689–1695. [Google Scholar]
- Wang, J.; Tsujii, T.; Rizos, C.; Dai, L.; Moore, M. Integrating GPS and pseudolite signals for position and attitude determination: Theoretical analysis and experiment results. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Salt Lake City, UT, USA, 19–22 September 2000; pp. 2252–2262. [Google Scholar]
- Wang, J.; Lee, H.; Rizos, C. GPS/INS integration: A performance sensitivity analysis. Wuhan Univ. J. Nat. Sci. 2003, 8, 508–516. [Google Scholar]
- Wang, J.; Wan, J.; Sinclair, D.; Watts, L. A neural network for GPS/INS/PL integration. In Proceedings of the International Symposium on GPS/GNSS, Surfers Paradise, Australia, 17–21 July 2006. CD-ROM Procs. [Google Scholar]
- Barnes, J.; Rizos, C.; Wang, J.; Nunan, T.; Reid, C. The development of a GPS/Pseudolite positioning system for vehicle tracking at BHP Steel, Port Kembla Steelworks. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 24–27 September 2002; pp. 1779–1789. [Google Scholar]
- Dai, L.; Zhang, J.; Rizos, C.; Han, S.; Wang, J. GPS and pseudolite integration for deformation monitoring applications. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Salt Lake City, UT, USA, 19–22 September 2000; pp. 1–8. [Google Scholar]
- Rizos, C.; Li, Y.; Politi, N.; Barnes, J.; Gambale, N. Locata: A new constellation for high accuracy outdoor and indoor positioning. In Proceedings of the FIG Working Week 2011: Bridging the Gap Between Cultures, Marrakech, Morocco, 18–22 May 2011. [Google Scholar]
- Rizos, C.; Grejner-Brzezinska, D.; Toth, C.; Dempster, A.; Li, Y.; Politi, N.; Barnes, J. A hybrid system for navigation in GPS-challenged environments: Case study. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Savannah, GA, USA, 16–19 September 2008; pp. 1418–1428. [Google Scholar]
- Rizos, C.; Grejner-Brzezinska, D.; Toth, C.; Dempster, A.; Li, Y.; Politi, N.; Barnes, J.; Sun, H.; Li, L. Hybrid positioning—A prototype system for navigation in GPS-challenged environments. GPS World 2010, 21, 42–47. [Google Scholar]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Locata: A new high accuracy indoor positioning system. In Proceedings of the International Conference on Indoor Positioning & Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 441–447. [Google Scholar]
- Barnes, J.; Rizos, C.; Kanli, M.; Pahwa, A.; Small, D.; Voight, G.; Gambale, N.; Lamance, J. High accuracy positioning using Locata’s next generation technology. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Long Beach, CA, USA, 13–16 September 2005; pp. 2049–2056. [Google Scholar]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voight, G.; Gambale, N. High precision indoor and outdoor positioning using LocataNet. In Proceedings of the International Symposium on GPS/GNSS, Tokyo, Japan, 15–18 November 2003; pp. 9–18. [Google Scholar]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voight, G.; Gambale, N. LocataNet: The positioning technology of the future. In Proceedings of the 6th International Symposium on Satellite Navigation Technology Including Mobile Positioning & Location Services, Melbourne, Australia, 22–25 July 2003. [Google Scholar]
- Yang, L.; Li, Y.; Jiang, W.; Rizos, C. Locata network design and reliability analysis for harbour positioning. J. Navig. 2015, 68, 227–247. [Google Scholar] [CrossRef]
- Amt, J. Methods for Aiding Height Determination in Pseudolite Based Reference Systems Using Batch Least-Squares Estimation. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson Air Force Base, OH, USA, 2006. [Google Scholar]
- Shockley, J. Estimation and Mitigation of Unmodeled Errors for a Pseudolite Based Reference System. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson Air Force Base, OH, USA, 2006. [Google Scholar]
- Barnes, J.; Rizos, C.; Lee, H.; Roberts, G.; Meng, X.; Cosser, E.; Dodson, A. The Integration of GPS and Pseudolites for Bridge Monitoring. In A Window on the Future of Geodesy; Sanso, F., Ed.; IAG Symp. 2003; Springer: Berlin/Heidelberg, Germany, 2003; Volume 128, pp. 83–88. ISBN 3-540-24055-1. [Google Scholar]
- Jiang, W.; Li, Y.; Rizos, C. Locata-based precise point positioning for kinematic maritime applications. GPS Solut. 2015, 19, 117–128. [Google Scholar] [CrossRef]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voigt, G.; Gambale, N. LocataNet: Intelligent time-synchronised pseudolite transceivers for cm-level stand-alone positioning. In Proceedings of the 11th International Association of Institutes of Navigation World Congress, Berlin, Germany, 21–24 October 2003. [Google Scholar]
- Crawford, M. Optimal Geometric Deployment of a Ground Based Pseudolite Navigation System to Track a Landing Aircraft. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson Air Force Base, OH, USA, 2006. [Google Scholar]
- Lamance, J.; Small, D. Locata correlator based beam forming antenna technology for precise indoor positioning and attitude. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 20–23 September 2011; pp. 2436–2445. [Google Scholar]
- Barnes, J.; Rizos, C.; Kanli, M.; Small, D.; Voight, G.; Gambale, N.; Lamance, J. Structural deformation monitoring using Locata. In Proceedings of the 1st FIG International Symposium on Engineering Surveys for Construction Works and Structural Engineering, Nottingham, UK, 28 June–1 July 2004. [Google Scholar]
- Barnes, J.; Rizos, C.; Kanli, M.; Pahwa, A. A positioning technology for classically difficult GNSS environments from Locata. In Proceedings of the IEEE/ION Position, Location, and Navigation Symposium, San Diego, CA, USA, 25–27 April 2006; pp. 715–721. [Google Scholar]
- Jiang, W.; Li, Y.; Rizos, C.; Barnes, J. Flight evaluation of a locata-augmented multisensor navigation system. J. Appl. Geod. 2013, 7, 281–290. [Google Scholar] [CrossRef]
- Rizos, C.; Kealy, A.; Li, B.; Choudhury, M.; Choy, S.; Feng, Y. Locata’s VRay™ Antenna Technology–Multipath Mitigation for Indoor Positioning. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 1629–1635. [Google Scholar]
- Jiang, W.; Li, Y.; Rizos, C. Precise indoor positioning and attitude determination using terrestrial ranging signals. J. Navig. 2014, 68, 274–290. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. Seamless indoor-outdoor navigation based on GNSS, INS and terrestrial ranging techniques. J. Navig. 2017, 70, 1183–1204. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. On-the-fly Locata/inertial navigation system integration for precise maritime application. Meas. Sci. Technol. 2013, 24, 105104. [Google Scholar] [CrossRef]
- Bouska, C.; Raquet, J. Tropospheric model error reduction in pseudolite based positioning systems. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 9–12 September 2003; pp. 390–398. [Google Scholar]
- Choudhury, M. Analysing Locata for Slow Structural Displacement Monitoring Application. Ph.D. Thesis, The University of New South Wales, Sydney, Australia, 2011. [Google Scholar]
- Lee, H.; Wang, J.; Rizos, C. An integer ambiguity resolution procedure for GPS/pseudolite/INS integration. J. Geod. 2005, 79, 242–255. [Google Scholar] [CrossRef]
- Bertsch, J.; Choudhury, M.; Rizos, C.; Kahle, H. On-the-fly ambiguity resolution for Locata. In Proceedings of the International Global Navigation Satellite Systems Society, IGNSS Symposium, Queensland, Australia, 1–3 December 2009. [Google Scholar]
- Amt, J.; Raquet, J. Flight testing of a pseudolite navigation system on a UAV. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007. [Google Scholar]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voight, G.; Gambale, N. LocataNet: A new positioning technology for high precision indoor and outdoor positioning. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 9–12 September 2003; pp. 1119–1128. [Google Scholar]
- Barnes, J.; Lamance, J.; Lilly, B.; Rogers, I.; Nix, M. An integrated Locata & Leica Geosystems positioning system for open-cut mining applications. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007; pp. 1161–1168. [Google Scholar]
- Barnes, J.; Rizos, C.; Pahwa, A.; Politi, N.; Cranenbroeck, J. The potential for Locata technology for structural monitoring applications. J. GPS 2007, 6, 166–172. [Google Scholar] [CrossRef]
- Lee, H. GPS/pseudolite/SDINS integration approach for kinematic applications. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 24–27 September 2002; pp. 1464–1473. [Google Scholar]
- Goshen-Meskin, D.; Bar-Itzhack, I. Unified approach to inertial navigation system error modeling. J. Guid. Control Dyn. 1992, 15, 648–653. [Google Scholar] [CrossRef]
- Yang, L. Reliability Analysis of Multi-Sensors Integrated Navigation Systems. Ph.D. Thesis, University of New South Wales, Sydney, Australia, 2014. [Google Scholar]
- Jiang, W.; Li, Y.; Rizos, C. Optimal data fusion algorithm for navigation using triple integration of PPP-GNSS, INS, and terrestrial ranging system. IEEE Sens. J. 2015, 15, 5634–5644. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. A multisensor navigation system based on an adaptive fault-tolerant GOF algorithm. IEEE Trans. Intell. Transp. Syst. 2017, 18, 103–113. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. Improved decentralized multi-sensor navigation system for airborne applications. GPS Solut. 2018, 22, 78. [Google Scholar] [CrossRef]
- Choudhury, M.; Harvey, B.; Rizos, C. Tropospheric correction for Locata when known point ambiguity resolution technique is used in static survey–is it required? In Proceedings of the International Symposium on GPS/GNSS, Gold Coast, Australia, 1–3 December 2009. [Google Scholar]
- Biberger, R.; Teuber, A.; Pany, T.; Hein, G. Development of an APL error model for precision approaches and validation by flight experiments. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 9–12 September 2003; pp. 2308–2317. [Google Scholar]
- RTCA. GNSS Based Precision Approach Local Area Augmentation System (LAAS)-Signal-in-Space Interface Control Document (ICD); RTCA/DO-246A; Radio Technical Commission for Aeronautics: Washington, DC, USA, 2000. [Google Scholar]
- Bouska, T. Development and Simulation of a Pseudolite-Based Flight Reference System. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson Air Force Base, OH, USA, 2003. [Google Scholar]
- Rüeger, J. Refractive index formulae for radio waves. In Proceedings of the FIG XXII International Congress, Washington DC, USA, 19–26 April 2002. [Google Scholar]
- Wang, J.; Wang, J.; Sinclair, D.; Watts, L.; Lee, H. Tropospheric delay estimation for pseudolite positioning. J. GPS 2005, 4, 106–112. [Google Scholar] [CrossRef]
- Bonenberg, L.; Hancock, C.; Roberts, G. Indoor multipath effect study on the Locata system. J. Appl. Geod. 2010, 4, 137–143. [Google Scholar] [CrossRef]
- Rizos, C. Locata: A positioning system for indoor and outdoor applications where GNSS does not work. In Proceedings of the 18th Association of Public Authority Surveyors Conference, Canberra, Australia, 12–14 March 2013; pp. 73–83. [Google Scholar]
- Barnes, J.; Rizos, C.; Kanli, M.; Pahwa, A. A solution to tough GNSS land applications using terrestrial-based transceivers (LocataLites). In Proceedings of the 19th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Fort Worth, TX, USA, 26–29 September 2006; pp. 1487–1493. [Google Scholar]
- Bonenberg, L.; Hancock, C.; Roberts, G. Locata performance in a long term monitoring. J. Appl. Geod. 2013, 7, 271–280. [Google Scholar] [CrossRef]
- Lee, H.; Soon, B.; Barnes, J.; Wang, J.; Rizos, C. Experimental analysis of GPS/Pseudolite/INS integration for aircraft precision approach and landing. J. Navig. 2008, 61, 257–270. [Google Scholar] [CrossRef]
- Trunzo, A.; Benshoof, P.; Amt, J. The UHARS non-GPS based positioning system. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Portland, OR, USA, 20–23 September 2011; pp. 3582–3586. [Google Scholar]
- Yang, L. Performance of fault detection and exclusion for GNSS/Locata integrated navigation. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 1242–1251. [Google Scholar]
- Rizos, C.; Barnes, J.; Small, D.; Voight, G.; Gambale, N. A new pseudolite-based positioning technology for high precision indoor and outdoor positioning. In Proceedings of the International Symposium and Exhibition on Geoinformation, Shah Alam, Malaysia, 13–14 October 2003; pp. 115–129. [Google Scholar]
- Barnes, J.; Rizos, C.; Kanli, M.; Small, D.; Voight, G.; Gambale, N.; Lamance, J.; Nunan, T.; Reid, C. Indoor industrial machine guidance using Locata: A pilot study at BlueScope Steel. In Proceedings of the 60th Annual Meeting of the U.S. Institute of Navigation, Dayton, OH, USA, 7–9 June 2004; pp. 533–540. [Google Scholar]
- Khan, F.; Dempster, A.; Rizos, C. Locata-based positioning in the presence of WiFi interference: Test results. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Savannah, GA, USA, 16–19 September 2008; pp. 2645–2649. [Google Scholar]
- Khan, F.; Dempster, A.; Rizos, C. Novel time-sharing scheme for virtual elimination of Locata-WiFi interference effects. In Proceedings of the International Symposium on GPS/GNSS, Tokyo, Japan, 25–28 November 2008; pp. 526–530. [Google Scholar]
- Khan, F.; Rizos, C.; Dempster, A. Locata performance evaluation in the presence of wide-and narrow-band interference. J. Navig. 2010, 63, 527–543. [Google Scholar] [CrossRef]
- Khan, F.; Dempster, A.; Rizos, C. Adaptive loop aiding for performance improvement in weak signal environment. In Proceedings of the European Navigation Conference, Naples, Italy, 3–6 May 2009. Paper D5-1, CD-ROM Procs. [Google Scholar]
- Khan, F.; Choudhury, M.; Dempster, A.; Rizos, C. A hybrid carrier phase measurement weighting scheme for solution improvement of carrier point positioning. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of the U.S. Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; pp. 892–900.
- Montillet, J.; Bonenberg, L.; Hancock, C.; Roberts, G.W. On the improvements of the single point positioning accuracy with Locata technology. GPS Solut. 2014, 18, 273–282. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Generation System (Prototype Since 2002) | Second Generation System (Commercial Deployment Since 2006) | ||
|---|---|---|---|
| Signal structure | Frequencies | Single-frequency at GPS L1 | Dual-frequency 2.4 GHz (80 MHz bandwidth) |
| PRN code | C/A (1.023 MHz chipping rate) | Proprietary (10 MHz chipping rate) | |
| Licence requirements | Licensing issues & problem for wide area deployment | None required, FCC compliant | |
| LocataLite (transceiver) | Hardware | FPGA & DDS technology | FPGA & DDS technology with a modular design |
| Output power | Several microwatts | Maximum of 1 watt | |
| Range | ~600 metres | ~10 km line-of-sight | |
| Antenna | RHCP patch & ¼ wave | Antenna design dependent on application | |
| Size | 260 × 200 × 45 mm | 240 × 135 × 30 mm | |
| Weight | 2.1 kg | 1 kg | |
| Locata Rover (receiver) | Hardware | Zarlink/Mitel based GPS receiver chipset | FPGA technology, modular design |
| Measurement rate | 1 Hz | 25 Hz | |
| RT positioning | 1 Hz on-board | 25 Hz through LINE software, 10 Hz onboard | |
| AR | Known point initialisation (KPI) | On-the-fly (OTF) | |
| Antenna | Various types tested including RHCP patch and ¼ wave | Antenna design will depend on application | |
| Size | 200 × 100 × 40 mm | 130 × 135 × 30 mm | |
| Weight | 300 g | 500 g | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rizos, C.; Yang, L. Background and Recent Advances in the Locata Terrestrial Positioning and Timing Technology. Sensors 2019, 19, 1821. https://doi.org/10.3390/s19081821
Rizos C, Yang L. Background and Recent Advances in the Locata Terrestrial Positioning and Timing Technology. Sensors. 2019; 19(8):1821. https://doi.org/10.3390/s19081821
Chicago/Turabian StyleRizos, Chris, and Ling Yang. 2019. "Background and Recent Advances in the Locata Terrestrial Positioning and Timing Technology" Sensors 19, no. 8: 1821. https://doi.org/10.3390/s19081821
APA StyleRizos, C., & Yang, L. (2019). Background and Recent Advances in the Locata Terrestrial Positioning and Timing Technology. Sensors, 19(8), 1821. https://doi.org/10.3390/s19081821