1. Introduction
Azimuth estimation is an important research area in passive sonar applications. Since two hydrophones are easy to deploy and throwing buoys is also easy in actual combat, azimuth estimation algorithms, based on the cross-correlation time-delay estimation of two hydrophones are often applied to buoys and autonomous underwater vehicles (AUVs) [
1]. However, the cross-correlation algorithm requires a high signal-to-noise ratio (SNR) and can only estimate one target. Using only two sensors to estimate more targets and obtain more accurate estimation results has always been the focus of the research on passive sonar applications.
In passive detection research, many array processing algorithms can improve the performance of azimuth estimation, such as the split aperture method, which can obtain an extremely small size and spacing of the array elements, while avoiding the formation of grating lobes [
2], and can also modify the beamforming process, according to the linear phase relationship between two subarrays, to obtain high-precision azimuth estimation results [
3]. In addition, the co-prime array algorithm can achieve a higher degree of freedom, with a limited number of elements, thus increasing the number of estimable sources [
4]. However, such algorithms need a special array structure first. For example, the split aperture method requires two sub-arrays, with element spacing of
and
, and co-prime arrays, needing two sub-arrays, have
M and
N sensors, where
M and
N are co-prime with the appropriate inter-element spacing [
5]. For two hydrophones, it is difficult to obtain such spatial information. Therefore, in order to improve the azimuth estimation performance of two hydrophones, only additional information from other dimensions or equivalent spatial information from other dimensions can be added.
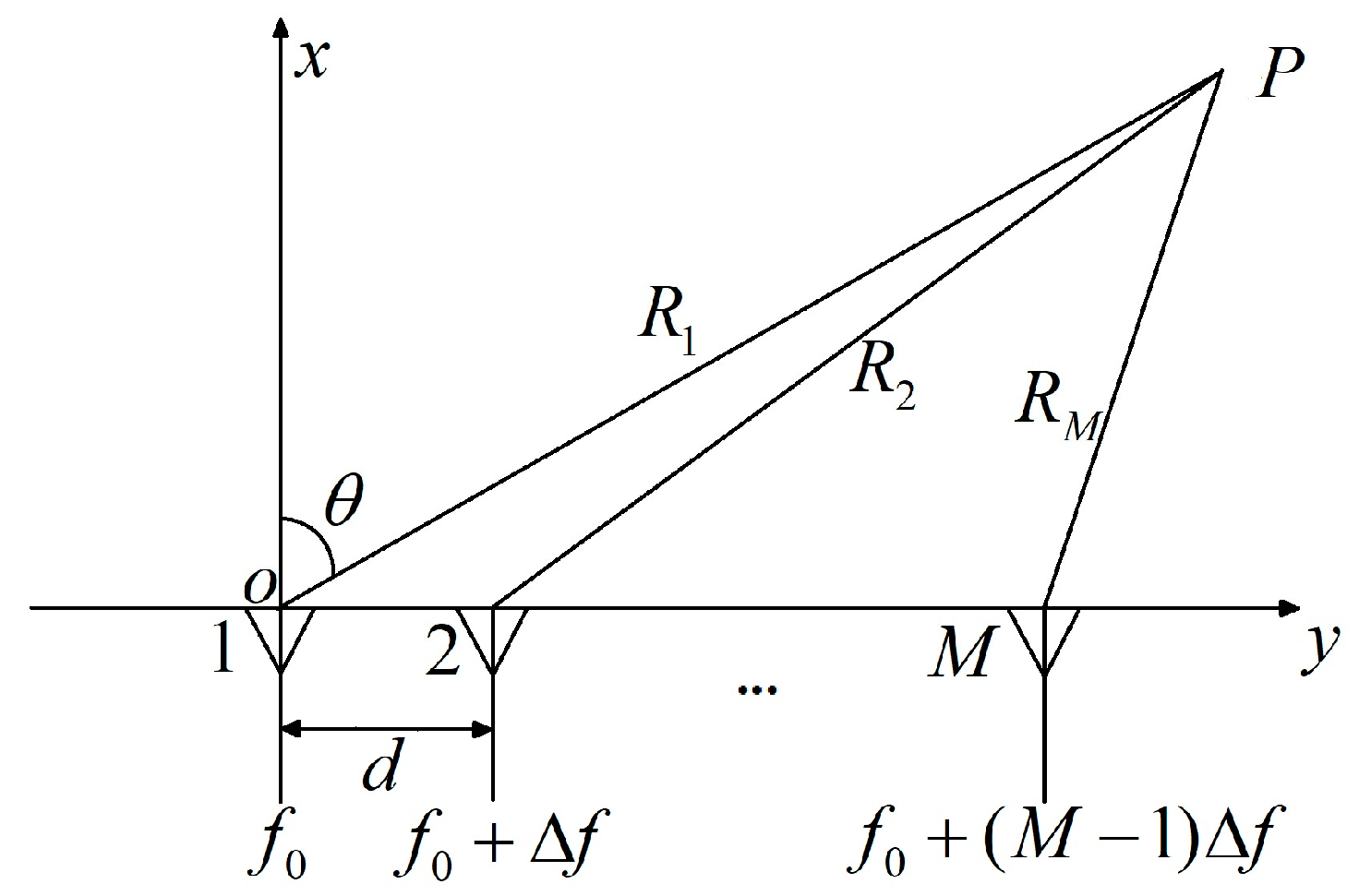
In the application of a multiple-input multiple-output (MIMO) radar, there is a frequency diversity array (FDA) technique [
6], the idea of which is to combine the spatial information and the frequency information. In 2006, Antonik et al. first proposed the concept of FDA at the International Radar Conference [
7]. The algorithm introduces a frequency difference between each array element at the transmitting terminal and combines the distance and the scanning angle to improve the anti-interference ability [
8]. In recent years, scholars from various countries have done a great deal of research on FDA, such as improving the practicality of FDA [
9], reducing the array cost [
10], extending FDA to distance dimensions [
11], and applying FDA to the bistatic joint estimation of the distance and azimuth [
12]. The application of the FDA algorithm in radars has matured. Researchers have made a comprehensive analysis of the algorithm’s performance [
10,
11,
13]. Whatever the improvement of the algorithm, it is always the case that the phase difference changes, caused by the sound path and the frequency, are used to relate the distance and the angle change.
In passive sonar applications, the target is often a broadband source. However, the conventional towed array processing only divides the frequency band into many sub-bands. Then, the azimuth estimation results are calculated and added together. Both the wideband processing method [
14] and the time domain beamforming algorithm [
15] do not take advantage of the relationship between the frequency, target azimuth and signal phase. Inspired by the FDA technique in radars, this paper applies the idea of frequency diversity to the azimuth estimation of two hydrophones in a passive sonar. The information dimension of the dual-element output signal is improved by the frequency information, thereby realizing a high performance of the azimuth estimation. However, the passive algorithm of the two hydrophones has an important difference from the commonly used algorithm in the MIMO radar. That is, the received signal of the passive sonar is unpredictable, and the initial phase of each frequency point is unknown. Therefore, the algorithm first removes the initial phase on each frequency component of the signal by conjugate processing, which calculates the cross-spectral density between the two elements. A frequency domain vector that can be used for beamforming is constructed using a cross-spectrum, the phase of which changes with the target azimuth and the sensor interval between the different frequency. The corresponding weighted vector is designed to obtain the azimuth estimation result.
The remainder of this paper is organized as follows: In
Section 2, we first briefly introduce the cross-correlation method, cross-spectral method and FDA. Then the passive azimuth estimation algorithm of two hydrophones, based on the FDA technique, is proposed, and the processing gain and resolution of the algorithm are analyzed. In
Section 3, the algorithm and the traditional algorithm are compared by simulation experiments, and the effectiveness and advantages of the algorithm are verified.
Section 4, experimental data processing further proves that the proposed two-hydrophone passive azimuth estimation algorithm using the FDA technique is better than the cross-correlation method and can obtain a clear azimuth history diagram. In addition, the influence of the energy spectrum distribution of the signal on the estimation result is analyzed. The final conclusion is given in
Section 5.
4. Experimental Data Verification
The algorithm is first verified with Swell 96 horizontal south array data [
21], using the 14th to 28th array elements. The SWellEx-96 Experiment was conducted between May 10 and 18, 1996, approximately 12 km from the tip of Point Loma near San Diego, California. Acoustic sources, towed from the R/V Sproul, transmitted various broadband and multi-tone signals at frequencies between 50 and 400 Hz.
In order to further compare the performance of the two hydrophone algorithms, conventional array processing is used to obtain the azimuth estimation result as a reference, because the array gain of the processing of multiple array elements leads to a clear trajectory. The processing frequency bandwidth is 20–1000 Hz. The azimuth history diagram is shown in
Figure 10a. It can be seen, from the figure, that within this time period (1–3500 s), there are mainly two targets, one with a large span in the azimuth, and one mainly at around 40°.
The 14th array element and the 28th array element are selected as the two hydrophones, and the distance between them is 106 m.
Figure 10b is the signal spectrum of the 14th and 28th elements, and the Fourier transform time is from 1000 s to 1001 s. The results of the cross-correlation method and the frequency diversity algorithm are shown in
Figure 11. The sampling frequency
fs is 3277 Hz, the number of samples is 3277, and
. The processing bandwidth
is set to 980 Hz, according to the processing bandwidth of 20–1000 Hz.
From the comparison in
Figure 11, it can be found that, using the same processing time, the same hydrophone, the target trajectory, estimated by the frequency diversity algorithm, is obviously clearer than that obtained by the cross-correlation algorithm. The algorithm is further verified by the South Sea data. Similarly, the conventional array processing is performed first, and a relatively accurate orientation estimation result is obtained. Then, we compare the cross-correlation method based on the passive two-hydrophone and the frequency diversity algorithm. In the array processing, 64 array elements are selected, with an interval of 4 m, and the processing method uses CBF. The processing frequency band is 20–400 Hz, and the sampling frequency is 2048 Hz. The azimuth estimation results are in
Figure 12.
The data are processed using two hydrophones, as shown in
Figure 13, and the number of samples is 2048,
, and
is set to 380 Hz.
In
Figure 13a, only a little blurred outline can be seen, and the trajectory of the target can hardly be observed. In
Figure 13b, the trajectories of target 1, target 2, and target 3 can be clearly observed. The trajectory of target 4 is not clear. It can be explained that the performance of the two-hydrophone algorithm based on frequency diversity technology is significantly higher than that of the cross-correlation algorithm. Moreover, we found, in the experiment, that the frequency diversity algorithm has a higher processing gain, which is easily seen before taking the beam energy by 10 lg. Before taking 10 lg, the beam energy is shown in
Figure 14.
Comparing
Figure 14b with
Figure 14c, it is found that the frequency diversity algorithm is better than the cross-correlation algorithm, regardless of whether the log is taken or not. Furthermore, comparing
Figure 14c with
Figure 14a, it can be found the energy of target 2 and target 3 is significantly improved when the frequency diversity algorithm is used. To further reflect this feature, we take the azimuth estimation result at 4500 s as an example. At this time, target 2 and target 3 are located at 3° and −17°, respectively, and it is apparent, from the comparison of
Figure 15, that the energy of target 2 and target 3 is enhanced.
The reason for this phenomenon is that the frequency diversity algorithm of the two hydrophones mainly uses the frequency domain information of the signal. Therefore, rich frequency domain information and uniform frequency domain energy distribution are beneficial for the energy of the beamforming output. The spectrums of Target 1 and Target 4 are shown in
Figure 16a, and the spectra of target 2 and target 3 are shown in
Figure 16b. From the comparison of
Figure 16a,b, the spectrums of target 2 and target 3 are significantly richer than that of target 1 and target 4, and the energy distributions are more uniform. Therefore, in the estimation results of the two hydrophones, the energy of targets 2 and 3 is strengthened. Among them, the spectrum energy distribution of target 4 is the most concentrated so, in the two-hydrophone azimuth estimation, target 4 can hardly be observed.
5. Conclusions
This paper proposes a frequency diversity algorithm to achieve passive azimuth estimation using two hydrophones. Compared with the traditional cross-correlation method, the algorithm has a high processing gain and can obtain a clear target trajectory. When the energy of the target signal is evenly distributed in the frequency domain, the processing gain of the algorithm using two hydrophones may even exceed the CBF processing gain of multiple array elements. In addition, in the theoretical derivation, the relationship between the resolution, the sensor interval and the processing bandwidth is analyzed. In the simulation and experiment, the feasibility of the algorithm and the advantages, compared with the cross-correlation method, are verified.
The algorithm proposed in this paper can obtain a clear target trajectory using the wideband signals received by only two hydrophones. This is significant for the application of target estimation in the field of buoy and AUV collaborative operations. The idea of using frequency domain information to virtualize array element domain information has important academic value for passive sonar azimuth estimation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}