1. Introduction
Among structural health monitoring (SHM) techniques, Lamb-wave-based methods have shown great potential for fast damage detection in plate-like structures [
1]. Lamb waves can propagate a distance with low attenuation and are highly sensitive to small imperfections [
2,
3]. These waves have been significantly utilized for SHM and determination of surface defects in large metallic structures [
4]. Accurately estimating the damage not only requires the construction of damage images for its localization but also an accurate quantification of both the location and size of the damage. The presence of damage in a structure results in the forward and backward scattering of waves. The change in Lamb wave propagation due to this reflection and transmission can be detected and analyzed to evaluate the damage [
5]. There are a variety of methods to excite and receive Lamb wave signals. These methods can be grouped into five broad categories based on the transducers [
6]: ultrasonic probes, lead zirconate titanate (PZT) transducers and piezocomposite transducers, laser-based ultrasonic transducers, interdigital transducers (IDTs), and fiber-optic transducers. Comparing these methods, PZT transducers can be directly mounted on the surface of the target structure to excite/receive the Lamb waves through in-plane strain coupling [
7,
8]. As a result, PZT transducers can be used for fast and in situ SHM. PZT transducers are small in size, light weight, consume a low amount of power, and produce a frequency response in a wide region. They can be conveniently arranged as a network of sensors to record multipoint measurements under and on the surface of the host structure. One prominent feature of PZT transducers for damage detection is that their performance does not deteriorate even when the damage occurs in its vicinity [
6,
9]. Lamb-wave-based damage detection techniques have employed different arrangements of PZT transducers to actuate and sense the wave propagation. The rectangular/square array of sensors [
10,
11,
12] and circular arrangement of sensors [
11,
13,
14,
15,
16] are popular strategies to excite/sense Lamb waves in homogeneous plates. The circular arrangement [
13] was further improved using two ring-shaped arrangements of PZT transducers on an aluminum plate [
17]. This pitch–catch configuration reduced the isolated region and improved the resolution in the damage monitoring area [
17]. Also, four PZT discs have been arranged on the wing slat of Boeing 737 aircraft [
18], and three PZT sensors have been attached on the surface of a composite plate [
19] to excite and sense the Lamb waves.
Lamb waves generated by PZT transducers contain dispersion and multimode characteristics and require sophisticated signal-processing techniques to process the dynamic response signals [
6]. Various approaches have been introduced for physical interpretation of the response signal and damage estimation in target structures. Discrete wavelets and the Hilbert transform have been combined to process Lamb wave signals [
13], and to estimate the damage location and size using arrival time and amplitude of the damage-scattered peak [
18]. Empirical mode decomposition (EMD) has been used to decompose the scattered signal in a damaged plate to obtain the damage size and location [
19]. Wavelet transforms have been used in dispersion analysis of Lamb waves and detection of damage in aluminum plates [
20]. An enhanced detection resolution usually requires more measurement points and the processing of a large quantity of data, which makes the detection time consuming. Damage detection based on Lamb wave focusing by an array of PZT transducers has improved the detection resolution using dispersion compensation [
2]. An approach for estimating guided wave scattering patterns from a sparse transducer array was presented by recording the corresponding scattering matrix at a finite number of incident and scattered angles. The recorded samples were further used to estimate the scattering matrix by a multiquadric radial basis function (MQ-RBF) interpolation method [
21]. An ellipse-based damage-imaging algorithm was developed to investigate linear cracks in a steel plate using guided waves [
22]. It was found that only limited size defects could be mapped, and defect location or size could not be effectively quantified. Lamb-wave-based crack quantification for plate-like structures has been developed by finite element (FE) simulation and Bayesian updating of data [
23]. It was found that improving the accuracy required using more updating data points. There have also been methods which dealt with signal processing to improve the damage localization in the existing detection techniques. A multifrequency analysis [
24] used the time shift averaging algorithms applied to the differential signals filtered at multiple frequencies to detect the hole damage in an aluminum plate. It resulted in many images obtained for the same structural state which were then fused to improve the damage localization. A multiparameter approach [
25] was presented using the reconstruction algorithm which enhanced the damage localization of single detection framework by extracting different features from the propagating wave. Furthermore, there have been Lamb-wave-based baseline-free methods for damage imaging and localization in isotropic plates using wavelet transform, empirical mode decomposition [
26], and instantaneous baseline measurement [
27] methods. The instantaneous baseline damage localization for stiffened composite panels using the delay-and-sum algorithm [
28] has also been studied.
The methods utilizing PZT transducers usually require a large number of data points and the baseline signal for comparison with the damaged signal for accurate damage estimation. The total focusing method (TFM) used 16 PZT transducers arranged on an aluminum plate and required 240 signals per assessment to detect the circular damage. It further required the baseline signal in order to determine the initial conditions such as wave speed [
14]. The reconstruction algorithm for the probabilistic inspection of damage (RAPID) technique based on the ellipse method used 16 PZT transducers to calculate the area of circle-like damage [
11]. A two-step method that simulated corrosion as circular damage in an aluminum plate required 6 PZT transducers as well as the baseline signal for damage imaging [
15]. A data-driven, matched-field processing technique to locate circular damage required 17 PZT transducers randomly distributed on an aluminum plate. A strategy used the combination electromechanical impedance–PZT (EMI–PZT)-based technique and the convolutional neural network (CNN) algorithm to detect a 12-mm-diameter metallic nut (simulated as circular damage) in an aluminum plate [
12]. An ellipse algorithm model based on Voronoi tessellation and Delaunay triangulation used 60 transducers for the best coverage of a hole [
29]. Similarly, other nondestructive testing (NDT) and SHM methods have used 8 [
13], 12 [
16], and 16 [
14] PZT transducers for an accurate damage estimation. However, the use of too many PZT transducers or comparing the damaged signal with the baseline requires a great amount of data to be processed during the NDT/SHM process.
There are few Lamb-wave-based methods that detect damage using two or more stages/levels to improve the detection accuracy. A two-stage algorithm was proposed for an aluminum plate [
10] to locate the damage using signals from undamaged and damaged plates. Damage location was estimated in the first stage by applying the CWT on the extracted signals, and the results further improved in the second stage using Euclidean and Lagrangian optimization techniques on an enclosed area. This imaging method requires knowledge of the baseline signal, does not quantify the damage location, and provides no estimation of the damage size. A three-level damage detection approach was presented [
30] which used different methods at different levels to improve the damage localization. Level 1 is based on finding the maximum energy difference in damaged and undamaged structures. Level 2 measured the EMI, and level 3 characterized the damage by utilizing a weighted energy arrival method (WEAM). A multiple damage detection approach has been introduced using different stages of detection, and the influence of variable velocity on the damage estimation was analyzed [
31]. An NDT technique for Lamb wave tomography (LWT) was utilized [
32] for two-stage reconstruction of damage images. Two sets of parallel scans were used to approximate damage location and size in the first stage. In the second stage, small damage-related parameters, such as the changes in wave attenuation coefficient and wave velocity, were computed through linear approximations. Another two-step method for damage localization on an aluminum plate is to detect damage in the first step and then perform localization and characterization in the second step using a delay-and-sum imaging method [
15]. A Lamb-wave-based sparse representation inspection strategy has been proposed [
33] which uses the l1-norm optimization algorithm. The severity of damage was estimated by Euler–Bernoulli beam theory based on using baseline and damaged signals. The method introduced two damage detection levels: damage identification and depth evaluation. Two Lamb-wave-based predictive circle methods for damage estimation were compared [
34]. The first method used six intersection points of the four elliptical wave paths to estimate the damage represented by an enclosed circle. The second method drew a circle tangent to these ellipses, which represented the damage better than the first method. However, the accuracy of the methods was tested in two different sizes of the inspection area, and signals were processed using the cross-correlation technique, which requires the baseline signal. By now, the accuracy of results in two-stage damage detection methods has improved in the second stage, usually by using additional data points or introducing a new signal-processing technique. In some methods, the feature measured in the second stage is different from the one measured in the first stage (e.g., location of the defect in the first stage and its size in the second stage). Most of the existing NDT methods for damage detection in plate-like structures only focus on identification of the damage position and not its extent/size [
10,
14,
15,
22,
24,
25,
30,
31,
32,
33,
35,
36,
37]. The reason is that most of the existing methods detect the damage usually in the form of images, and do not provide accurate quantitative measurements.
In order to provide a convenient multistage damage detection method in practice to meet the different requirements for detection accuracy, a Lamb-wave-based multistage damage detection method is introduced in this research to accurately quantify not only the location but also the size of the damage. The method introduces a strategy to arrange PZT transducers in the form of a network of detection cells on a large plate-like structure. The CWT method using the Gabor wavelet is applied to analyze the dynamic response caused by the damage. The damage location and size are evaluated in three stages through an algorithm based on the outer tangent circle method. A single-stage method provides an initial estimate of the damage size and locates the damaged cell. It further locates the damaged subcell inside the damaged cell. The estimation of damage location and size inside the damaged subcell significantly improves in the second and third stages of detection. The arrangement of transducers and the signal-processing method remain the same in all stages of damage detection. The method does not require the baseline signal from the undamaged plate, and the improvements in the subsequent stages can be achieved without the need for additional transducers. These features make the method less complicated, low-cost, and less time consuming.
The organization of this article is as follows:
Section 2 introduces the theoretical background of the outer tangent circle method. The detection strategy of the single-stage method, including the dispersion curves, FE simulation model, and influence of the size of the detection cell, are presented in
Section 3. The multistage stage damage detection in
Section 4 includes two- and three-stage detection strategies.
Section 5 covers the application of the method for multiple damage cases. The verification of the method through experiments is presented in
Section 6. At the end, the article is summed up with a discussion of the results in
Section 7, and conclusive remarks in
Section 8.
2. Outer Tangent Circle Method
Consider a plate with the central PZT transducer (P0) acting as an actuator, as shown in
Figure 1, to induce waves that propagate radially outward towards the free boundaries of the plate. Imagine circular damage located at coordinates (
x,
y) from the excitation point. Four other PZT transducers (P1–P4 in
Figure 1) act as sensors and are arranged in a square configuration beyond the damage location. The four corner transducers receive the direct signal from P0 and also the signals scattered by the damage. For example, the direct signal from P0 propagates a distance
and arrives at P4 with a time of flight
. However, there is another signal received at P4 by the scattering from the damage that travels a longer distance
and requires a longer arrival time
. The difference in the time of flight between the direct and damage-scattered signals is the delay time
, as shown in
Figure 1, which can be calculated from
where
is the group velocity. The distances
can be calculated using the geometric relations in
Figure 1 by
where
d is the distance between the corner transducers. Substitution into Equation (1) results in the relation
For a known value of
, Equation (3) represents an ellipse with focal points at P0 and P4, as shown with the blue dashed line in
Figure 1. Similarly, if the delay times for P1, P2, and P3 are
,
and
, respectively, then there will be three more ellipses with focal points at P0–P1, P0–P2, and P0–P3, respectively. Therefore, a total of four ellipses can be drawn by
Since the Lamb wave is scattered from the outer periphery of the damage, these ellipses will remain tangent to the damage periphery. A circle externally tangent to these ellipses will exactly cover the damage area. An algorithm based on the least-squares method was designed to draw the four ellipses using Equation (4), and to find the center and size of the externally tangent circle. The center of the externally tangent circle gives the location (x, y) of damage, and the diameter of this circle provides the size.
5. Application for Multiple Damage Detection
In the case of multiple damage in a plate-like structure, the arrangement of transducers in the form of a network of cells, as proposed in
Figure 6a, can help to estimate each damage in its cell. For the case when multiple damages exist in one cell, the further division of a cell into four triangular subcells will probably separate them, as the size of the subcell is very small compared with the whole structure. However, in an extreme case, there can be multiple damages so close to each other that they may exist in one subcell.
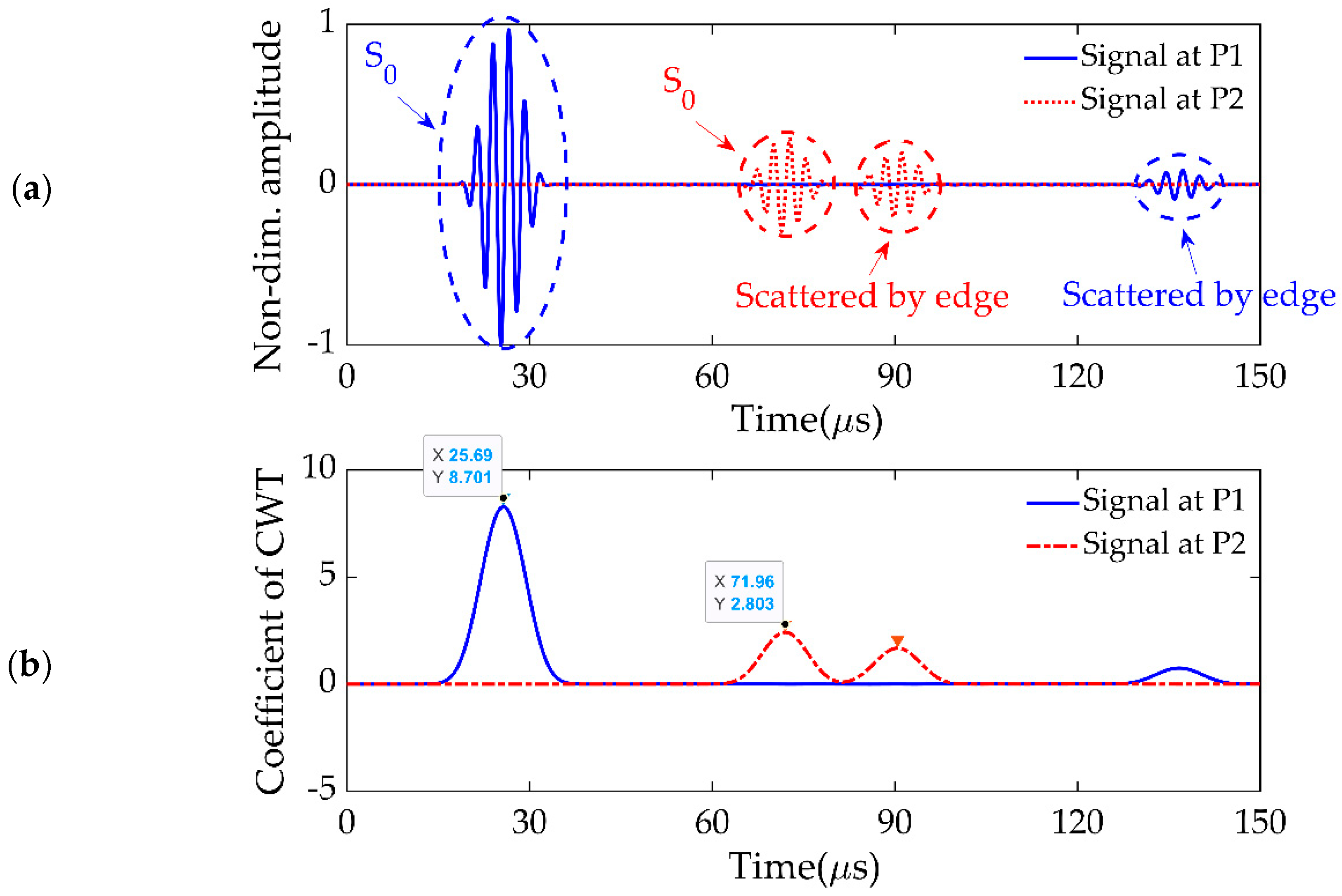
For such a case, there will be as many damage-scattered peaks in
Figure 7 as the number of damages in the plate, and each peak will provide the delay time caused by the corresponding damage. Therefore, based on the delay times calculated from the damage-scattered wave signals, all the ellipses would converge around their corresponding damage. An example multiple damage existing in one subcell is presented in
Figure 14, where two damages, D
1 and D
2, of 10 and 8 mm diameters, existed at (20,−40) and (−60,−100) mm, respectively. The signal received at P2 when the central transducer at P0 was excited in the first stage of detection is presented in
Figure 15a, which shows two damage-scattered peaks. The CWT of this signal is presented in
Figure 15b, which helped to calculate the delay time for each damage using the strategy discussed in
Section 3.2.
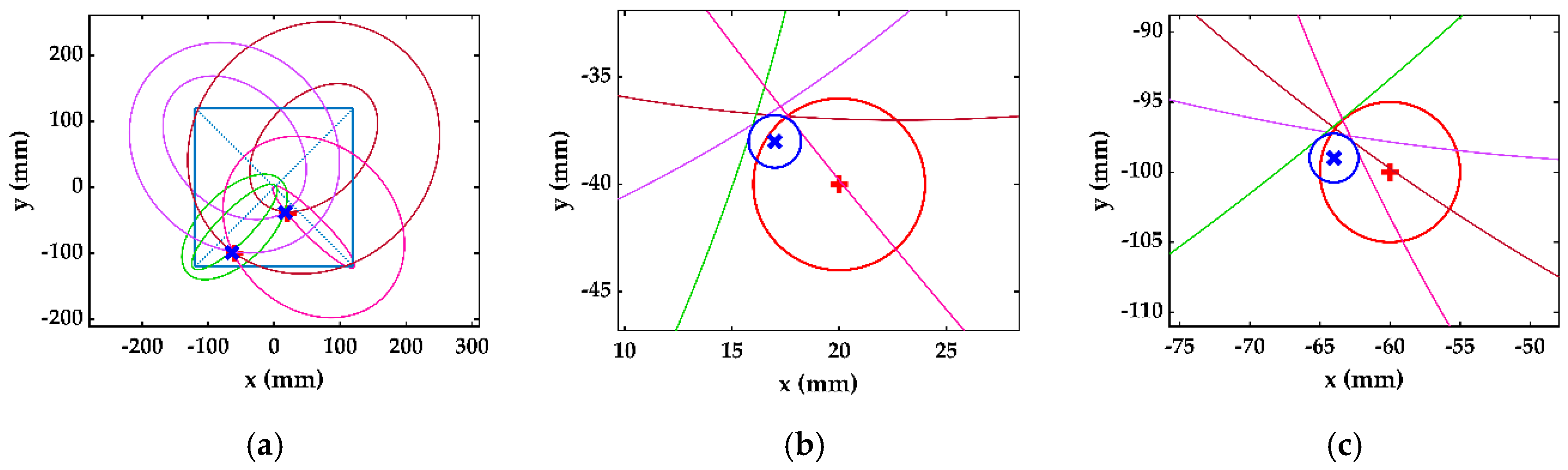
Similarly, there were two delay time values for each actuator–receiver pair, which formed a total of eight ellipses in the first stage using four actuator–receiver pairs. Each ellipse from each pair converged about one damage, which made four ellipses converge about D
1 and the other four about D
2. It is not important to know that which delay time or ellipse belongs to which damage; the designed algorithm estimates each damage using the four ellipses converging at one location.
Figure 16a shows the multiple damage detection in the single stage, and the comparison of estimated and actual damage is shown in
Figure 16b for D
1 and
Figure 16c for D
2.
Figure 16d shows the ellipses formed in second stage, and the comparison of estimated and actual damage for D
1 and D
2 is given in
Figure 16e,f, respectively. Similarly,
Figure 16g shows the ellipses formed in the third stage, and the comparison of estimated and actual damage for D
1 and D
2 is in
Figure 16h,i, respectively.
The relative error in the location and size estimation for each damage is presented in
Table 3. The results indicate that there was improvement in damage estimation in the second and third stages of the detection for multiple damages in one subcell. However, the relative errors in the case of multiple damages were slightly higher than the single damage case.
6. Experimental Evaluation
The accuracy of the proposed multistage damage detection method was further verified through experimental investigation. The plate dimensions, material properties, and transducer configuration were exactly the same as those in the numerical simulation shown in
Figure 6b. The damage was a punched hole of 7-mm diameter at the location of (90,−30) mm. The PZT wafers used in the experiments were made of PSN-33 with a density of 7.70 × 10
3 kg/m
3 and a diameter of 5.4 mm. The PZT wafers had a resonance frequency of 383 kHz and had the ability to excite/sense the Lamb wave signals in radially outward directions. The experiments were performed for two PZT configurations with
d = 240 mm and
d = 300 mm, respectively. The schematic diagram of the experimental setup for multistage damage detection is shown in
Figure 17a, and the real-time experimental setup is shown in
Figure 17b. A signal generator (RIGOL, DG1022) was programmed to generate the signal shown in
Figure 4a at the excitation transducer P0, and the signal was amplified to 45 V using a power amplifier (KROHN-HITE, 7602M). A four-channel oscilloscope (LeCroy, LC574AL) was used to record the response of each transducer. The oscilloscope captured the response signals over a sampling time of 200
at a sampling rate of 1 GHz. Every signal was acquired for an average of 500 times to reduce the noise.
During the single-stage of damage detection, the central transducer at point P0 was excited to induce the Lamb wave, and transducers P1–P4 (d = 240 mm) and P5–P8 (d = 300 mm) were used to measure the received signals. In multistage damage detection, the corner PZT transducers at P1, P2, P5, and P6 were also used to excite Lamb waves for the second and third stages of damage detection.
The signal received at P2 was processed in dimensionless form and is shown in
Figure 18a, which showed fluctuations caused by the scattering from the damage and the plate’s edge. The acquired signal shown in
Figure 18a was then processed by Sym8 wavelet function in
MATLAB to reduce the noise. The denoised signal is presented in
Figure 18b, which looks similar to the signal received at the same point during the simulation (as shown in
Figure 7b). The CWTs of recorded and denoised signals are presented in
Figure 18c,d, respectively, and the delay time was calculated as
which was close to the delay time
calculated through FE simulations.
The delay times, similarly calculated through experiments for signals received at all transducers, are shown in
Table 4.
The relative error in damage estimation at different stages of detection through simulations and experiments are compared with the actual location and size of the damage in
Table 5.
The experimental results of damage location and size for single-stage damage detection in the smaller detection cell had relative errors, respectively, of 15.28% and 128.56%. The relative errors in the same cell were reduced in the second stage to, respectively, 5.13% and 56.64%, and in the third stage to, respectively, 3.16% and 24.20%. A similar trend in the improvement of damage detection was found in the larger detection cell. The damage assessment accuracy of the multistage method was significantly higher than the single-stage detection in both cases; in particular, there was a significant improvement in the damage size detection.
7. Discussion of Results
During the numerical simulation, the excitation of the central PZT transducer in the single-stage damage detection method caused Lamb waves to propagate radially outward in all directions, and be scattered by any damage in the plate. The single-stage method efficiently located the damage (3.33% of error for d = 240 mm). The relative error in damage size estimation in the single-stage method was unacceptable (68.92% for d = 240 mm). However, the accuracy of damage location can help to identify the damaged cell, and the triangular subcell containing the damage. So, the single-stage damage detection method can directly obtain the size and location information of the damage, and it can locate the damaged subcell for the subsequent detection stages, especially for improving the estimation accuracy of damage size.
Based on the same transducer configuration, the second stage of damage detection could be conducted to improve the damage estimation by two ellipses from the single-stage detection, and one additional corner ellipse around the triangular subcell. The additional ellipse was obtained by exciting a corner transducer, and receiving at the other corner transducer separately in this subcell. With the three ellipses, the second stage of damage detection could reduce the relative errors in damage location and size, respectively, from 3.33% to 2.98% and from 68.92% to 22.67%.
Similarly, using the same transducer configuration, the third stage of damage detection was carried out by using the additional ellipse from the second stage and two extra ellipses, which were obtained by exciting the two corner transducers of the damage subcell and receiving at the other two corner transducers in the diagonally opposite direction. Using these three ellipses could reduce the relative errors from the second to the third stage in damage location and size, respectively, from 2.98% to 0% and 22.67% to 2.66%.
From the trend shown in
Figure 10, it can be concluded that the bigger ellipses obtained by larger detection cells could provide a better estimation of damage. Therefore, compared with the fast detection of the single-stage method with only a one-time excitation, the second stage could obtain better results by including one additional large ellipse from one extra excitation, and the third stage had the best damage estimation from two additional large ellipses by two extra excitations. This is because the single-stage method obtained the ellipses with transducer spacing
, the additional ellipse in the second stage was obtained by the corner transducers with large spacing
d, and the third stage included two extra ellipses with larger transducer spacing
It can be noticed that the bigger ellipse touching the damage, as shown in
Figure 13b, was almost a straight line and more accurately defined the tangent to the damage periphery than the smaller ellipse, as shown in
Figure 12b. As a result, depending on the location of the damage, the accuracy of the damage size was limited in the single-stage damage detection method by the size of the detection cell. In addition, the longer distance reduced the error in calculating the delay time by Equation (4). However, this was restricted by the attenuation of Lamb wave propagation.
The same conclusion can be confirmed by the experimental results in
Table 5; that is, the bigger ellipses formed in the large detection cell (
d = 300 mm) could obtain better results than the small ones (
d = 240 mm) at the same stage, and the detection accuracy could be improved at the higher stage in each detection cell. Even if the three-stage detection could provide accurate damage information, the excitation of the central transducer in single-stage damage detection was still important to locate the damaged cell and subcell used in the second and third damage detection stages. Actually, the utilization of third-stage detection depends on the nature of the problem and the accuracy requirements in practice.
Comparing
Figure 18c,d, the difference is hard to identify. This means the CWT had a better signal-to-noise ratio, and could extract the time-frequency feature exactly from the noisy signal. This is also the reason why CWT could process the Lamb wave signals of the damaged plate directly without a baseline. Generally, a greater value of error is expected in the larger cell due to the dispersion of Lamb waves, which leads to the inaccuracy in determining the delay time. However, the accuracy of this damage detection method improves as the size of the detection cell increases. This is because the CWT is a better time-frequency representative and can depress the dispersive characteristics effectively.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}