Primary User Localization and Its Error Analysis in 5G Cognitive Radio Networks



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Studies
- Omni-directional: There has been extensive research focusing on omnidirectional CRNs localization. Such omnidirectional localization methods estimate the location of a PU by using fingerprinting, trilateration, and multidimensional scaling-based estimation methods [15,19,20,23,24,25,26]. The simplest PU localization method among all these methods is centroid localization (CL) [23], which averages out the coordinates of the SUs to estimate the PU location. CL is a very simple and range-free approach, but due to its center-biased nature, it cannot achieve high accuracy. Therefore, the CL has been modified to weighted centroid localization (WCL) in [24], such that the localization performance is improved by using the weighting strategies. The weighting strategies for WCL are based on the received power, where the accurate measurements are given more weight, and vice versa. Another variant of WCL was proposed in [27] which tries to find a good match between the measured power and the nearest value to that power in a database by using mean square error. In [15,19,20,26], multidimensional scaling-based network localization methods were used to estimate the location of SUs and PUs, where both range-based and range-free schemes are utilized. All of the aforementioned localization methods consider how both PUs and SUs are using omnidirectional antennas. However, a number of current applications require the use of directional antennas to achieve better performance and a long transmission distance.
- Directional: Recently the work in [28,29,30,31] have shown that the use of directional antennas certainly reduces the localization error. In [31] the authors have investigated the impact of directional antennas on the localization performance of sectorized cellular networks. A directional of arrival (DoA)-based localization method for PU localization has been proposed in [29,30] where the SUs are equipped with multiple antennas. DoA measurements are estimated by using the multiple signal classification (MUSIC) method, and the Stansfield estimator is used to estimate the location of a PU. A joint DoA and received signal strength (RSS)-based PU localization method has been proposed in [28] which improves the localization performance, as compared to DoA-only and RSS-only methods.
3. System Model
4. Proposed PU Localization Method
- In CRNs, the SUs carry out spectrum sensing to find out the existence or non-existence of PU signals in a specific channel. If the channel is idle, the signal received by the SUs is typically noise, but if the channel is busy, then the received signal consists of both the PU signal and the noise. An energy detection model is usually used in such a scenario to decide the presence or absence of the PU signal. The energy detection model consists of a binary testing hypothesis, with and for the PU’s absence and presence, respectively. The binary hypothesis for the detection of a PU is defined as [34]andwhere y is the received signal, is the additive white Gaussian noise (AWGN) with zero mean and variance, and is the PU signal with zero mean and variance. Mainly, the energy detection-based PU detection is characterized by the probability of detection () and the probability of false alarm (). The test statistics for PU detection is a random variable with a probability distribution function (PDF) of the chi-square distribution. If the number of observations h is large, the PDF of the test statistics can be approximated by the Gaussian distribution—that is:Using the principle of constant false alarm rate (CFAR) [35], and are given as:andrespectively, where is the threshold for decision, and represents the Q-function. Each i-th SU at location detects the PU presence from the aforementioned test statistics.
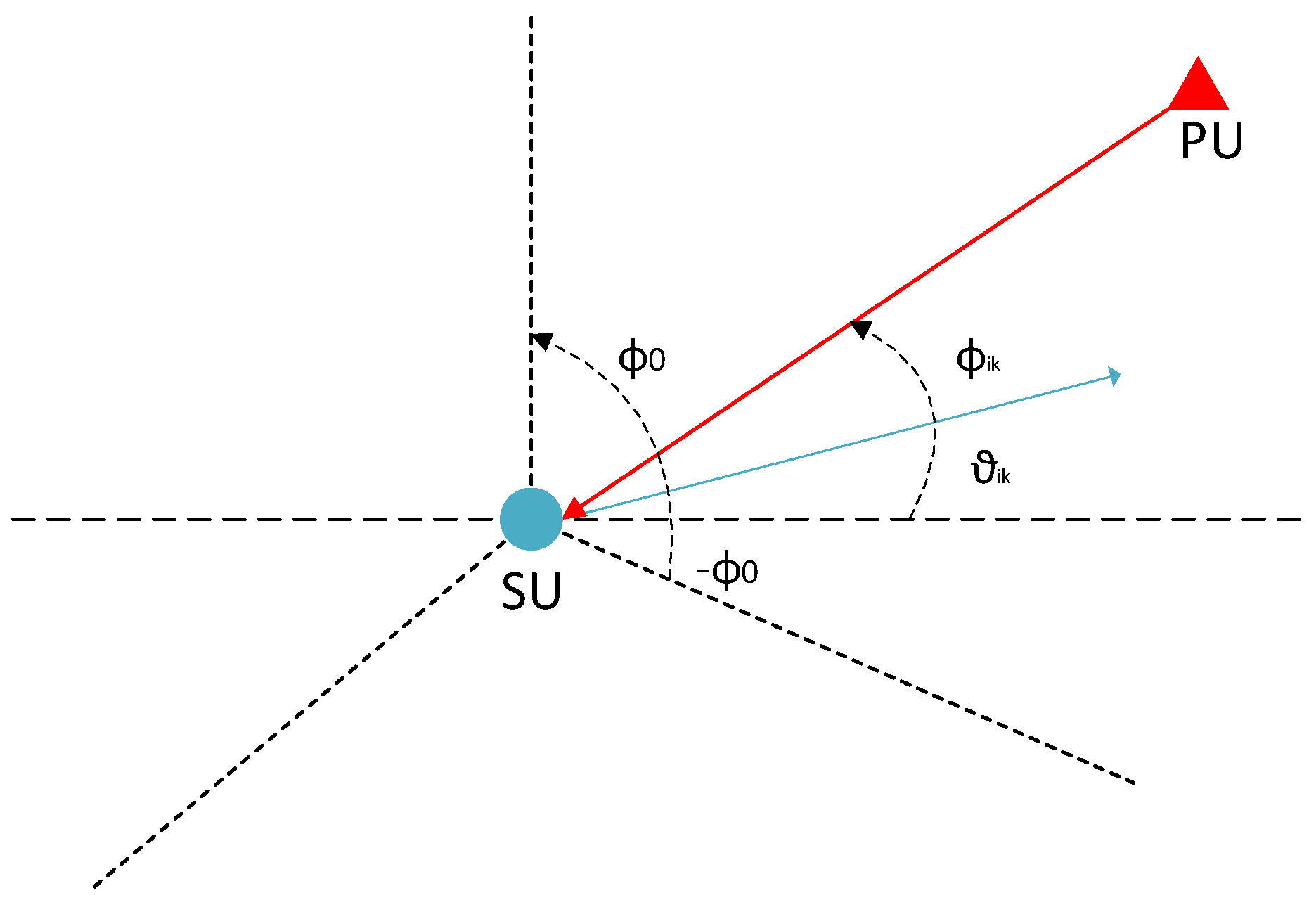
- The SUs then span the angle range of to find the direction of the signal from the PU. To elaborate, once an i-th SU receives some power from a PU, then based on its bore-sight angle in the k-th sector, it determines the direction of the signal where lies between . This phenomena is further illustrated in Figure 2.
- Select the grid points with location for each SU i and assign a value to each grid point, where if the grid angle is between or else .
- Aggregate the RSS values form the N SUs and select the grids with highest RSS values. Two different scoring strategies are selected here as follows:Based on the above scoring strategies, the total number of grid points K are selected for the PU location estimation.
- In the final step, a grid-based centroid localization method is used to estimate the PU location, which is given as:where , , and .
5. Localization Error Analysis
6. Numerical Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Axell, E.; Leus, G.; Larsson, E.; Poor, H. Spectrum Sensing for Cognitive Radio: State-of-the-Art and Recent Advances. IEEE Signal Process. Mag. 2012, 29, 101–116. [Google Scholar] [CrossRef]
- Ma, J.; Li, G.Y.; Juang, B.H. Signal Processing in Cognitive Radio. Proc. IEEE 2009, 97, 805–823. [Google Scholar]
- Lu, L.; Zhou, X.W.; Onunkwo, U.; Li, G.Y. Ten Years of Cognitive Radio Technology. EURASIP J. Wirel. Commun. Netw. 2012, 28, 1–16. [Google Scholar]
- Mitola, J.; Maguire, G. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Nam, H.; Ghorbel, M.B.; Alouini, M.S. Location-Based Resource Allocation for OFDMA Cognitive Radio Systems. In Proceedings of the IEEE International Symposium on Personal Indoor and Mobile Radio Communications, (PIMRC), Cannes, France, 9–11 June 2010; pp. 1–5. [Google Scholar]
- Chen, R.; Park, J.M.; Reed, J.H. Defense against primary user emulation attacks in cognitive radio networks. IEEE J. Sel. Areas Commun. 2008, 26, 25–37. [Google Scholar] [CrossRef]
- Anand, S.; Jin, Z.; Subbalakshmi, K. An analytical model for primary user emulation attacks in cognitive radio networks. In Proceedings of the 3rd IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks, Chicago, IL, USA, 14–17 October 2008; pp. 1–6. [Google Scholar]
- Chin, W.L.; Tseng, C.L.; Tsai, C.S.; Kao, W.C.; Kao, C.W. Channel-based detection of primary user emulation attacks in cognitive radios. In Proceedings of the IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–5. [Google Scholar]
- Le, T.N.; Chin, W.L.; Lin, Y.H. Non-cooperative and cooperative PUEA detection using physical layer in mobile OFDM-based cognitive radio networks. In Proceedings of the International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Li, Y.; Ma, X.; Wang, M.; Chen, H.; Xie, L. Detecting Primary User Emulation Attack Based on Multipath Delay in Cognitive Radio Network. In Smart Innovations in Communication and Computational Sciences; Panigrahi, B.K., Trivedi, M.C., Mishra, K.K., Tiwari, S., Singh, P.K., Eds.; Springer: New York, NY, USA, 2019; pp. 361–373. [Google Scholar]
- Ghanem, W.R.; Shokair, M.; Desouky, M.I. An improved primary user emulation attack detection in cognitive radio networks based on firefly optimization algorithm. In Proceedings of the 33rd National Radio Science Conference (NRSC), Aswan, Egypt, 22–25 February 2016; pp. 178–187. [Google Scholar]
- Fihri, W.F.; Ghazi, H.E.; Kaabouch, N.; Majd, B.A.E. Bayesian decision model with trilateration for primary user emulation attack localization in cognitive radio networks. In Proceedings of the International Symposium on Networks, Computers and Communications (ISNCC), Marrakech, Morocco, 16–18 May 2017; pp. 1–6. [Google Scholar]
- Fihri, W.F.; Arjoune, Y.; Ghazi, H.E.; Kaabouch, N.; Majd, B.A.E. A particle swarm optimization based algorithm for primary user emulation attack detection. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 823–827. [Google Scholar]
- El Mrabet, Z.; Arjoune, Y.; El Ghazi, H.; Abou Al Majd, B.; Kaabouch, N. Primary User Emulation Attacks: A Detection Technique Based on Kalman Filter. J. Sens. Actuator Netw. 2018, 7, 26. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H. Robust Multidimensional Scaling for Cognitive Radio Network Localization. IEEE Trans. Veh. Technol. 2015, 64, 4056–4062. [Google Scholar] [CrossRef]
- Khan, M.A.; Saeed, N.; Ahmad, A.W.; Lee, C. Location Awareness in 5G Networks Using RSS Measurements for Public Safety Applications. IEEE Access 2017, 5, 21753–21762. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, X.; He, S.; Shi, Z. Prospective Positioning Architecture and Technologies in 5G Networks. IEEE/ACM Trans. Netw. 2017, 31, 115–121. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. arXiv 2017, arXiv:1709.01015. [Google Scholar]
- Saeed, N.; Nam, H. Cluster Based Multidimensional Scaling for Irregular Cognitive Radio Networks Localization. IEEE Trans. Signal Process. 2016, 64, 2649–2659. [Google Scholar] [CrossRef]
- Saeed, N.; Haris, M.; Haq, M.I.U. Jointly locating the primary and secondary users in cognitive radio networks. In Proceedings of the International Conference on Communication, Computing and Digital Systems (C-CODE), Islamabad, Pakistan, 8–9 March 2017; pp. 6–10. [Google Scholar]
- Koivisto, M.; Hakkarainen, A.; Costa, M.; Kela, P.; Leppanen, K.; Valkama, M. High-Efficiency Device Positioning and Location-Aware Communications in Dense 5G Networks. IEEE Commun. Mag. 2017, 55, 188–195. [Google Scholar] [CrossRef]
- Türkyilmaz, O.; Alagöz, F.; Gür, G.; Tugcu, T. Environment-aware Location Estimation in Cellular Networks. EURASIP J. Adv. Signal Process. 2008, 2008, 1–9. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Mariani, A.; Kandeepan, S.; Giorgetti, A.; Chiani, M. Cooperative weighted centroid localization for cognitive radio networks. In Proceedings of the 2012 International Symposium on Communications and Information Technologies (ISCIT), Gold Coast, QLD, Australia, 2–5 October 2012; pp. 459–464. [Google Scholar]
- Nam, H.; Saeed, N.; Ben-Ghorbel, M.; Alouini, M.S. Primary user localisation and uplink resource allocation in orthogonal frequency division multiple access cognitive radio systems. IET Commun. 2015, 9, 1131–1137. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H. Energy Efficient Localization Algorithm With Improved Accuracy in Cognitive Radio Networks. IEEE Commun. Lett. 2017, 21, 2017–2020. [Google Scholar] [CrossRef]
- Magowe, K.; Kandeepan, S. Cooperative blind localization of primary user in a cognitive radio environment. In Proceedings of the 2014 8th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 15–17 December 2014; pp. 1–8. [Google Scholar]
- Wang, J.; Chen, J.; Cabric, D. Cramer-Rao Bounds for Joint RSS/DoA-Based Primary-User Localization in Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2013, 12, 1363–1375. [Google Scholar] [CrossRef]
- Wang, J.; Chen, J.; Cabric, D. Stansfield Localization Algorithm: Theoretical Analysis and Distributed Implementation. IEEE Wirel. Commun. Lett. 2013, 2, 327–330. [Google Scholar] [CrossRef]
- Penna, F.; Cabric, D. Cooperative DoA-only localization of primary users in cognitive radio networks. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 107. [Google Scholar] [CrossRef]
- Buyukcorak, S.; Kurt, G.K.; Yongacoglu, A. Received signal strength based localization in sectorized cellular networks. In Proceedings of the 2016 23rd International Conference on Telecommunications (ICT), Thessaloniki, Greece, 16–18 May 2016; pp. 1–5. [Google Scholar]
- Huang, L.; Zhu, G.; Du, X. Cognitive femtocell networks: An opportunistic spectrum access for future indoor wireless coverage. IEEE Trans. Wirel. Commun. 2013, 20, 44–51. [Google Scholar] [CrossRef]
- Wang, C.X.; Haider, F.; Gao, X.; You, X.H.; Yang, Y.; Yuan, D.; Aggoune, H.M.; Haas, H.; Fletcher, S.; Hepsaydir, E. Cellular architecture and key technologies for 5G wireless communication networks. IEEE Wirel. Commun. Mag. 2014, 52, 122–130. [Google Scholar] [CrossRef]
- Digham, F.F.; Alouini, M.S.; Simon, M.K. On the Energy Detection of Unknown Signals Over Fading Channels. IEEE Trans. Commun. 2007, 55, 21–24. [Google Scholar] [CrossRef]
- Lehtomaki, J.J.; Juntti, M.; Saarnisaari, H. CFAR strategies for channelized radiometer. IEEE Signal Process. Lett. 2005, 12, 13–16. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M.-S. Primary User Localization and Its Error Analysis in 5G Cognitive Radio Networks. Sensors 2019, 19, 2035. https://doi.org/10.3390/s19092035
Saeed N, Nam H, Al-Naffouri TY, Alouini M-S. Primary User Localization and Its Error Analysis in 5G Cognitive Radio Networks. Sensors. 2019; 19(9):2035. https://doi.org/10.3390/s19092035
Chicago/Turabian StyleSaeed, Nasir, Haewoon Nam, Tareq Y. Al-Naffouri, and Mohamed-Slim Alouini. 2019. "Primary User Localization and Its Error Analysis in 5G Cognitive Radio Networks" Sensors 19, no. 9: 2035. https://doi.org/10.3390/s19092035