A Bi-Directional Carrier Sense Collision Avoidance Neighbor Discovery Algorithm in Directional Wireless Ad Hoc Sensor Networks



Abstract
:1. Introduction
1.1. Related Works
1.2. Our Contributions
2. System Model and Basic Procedure
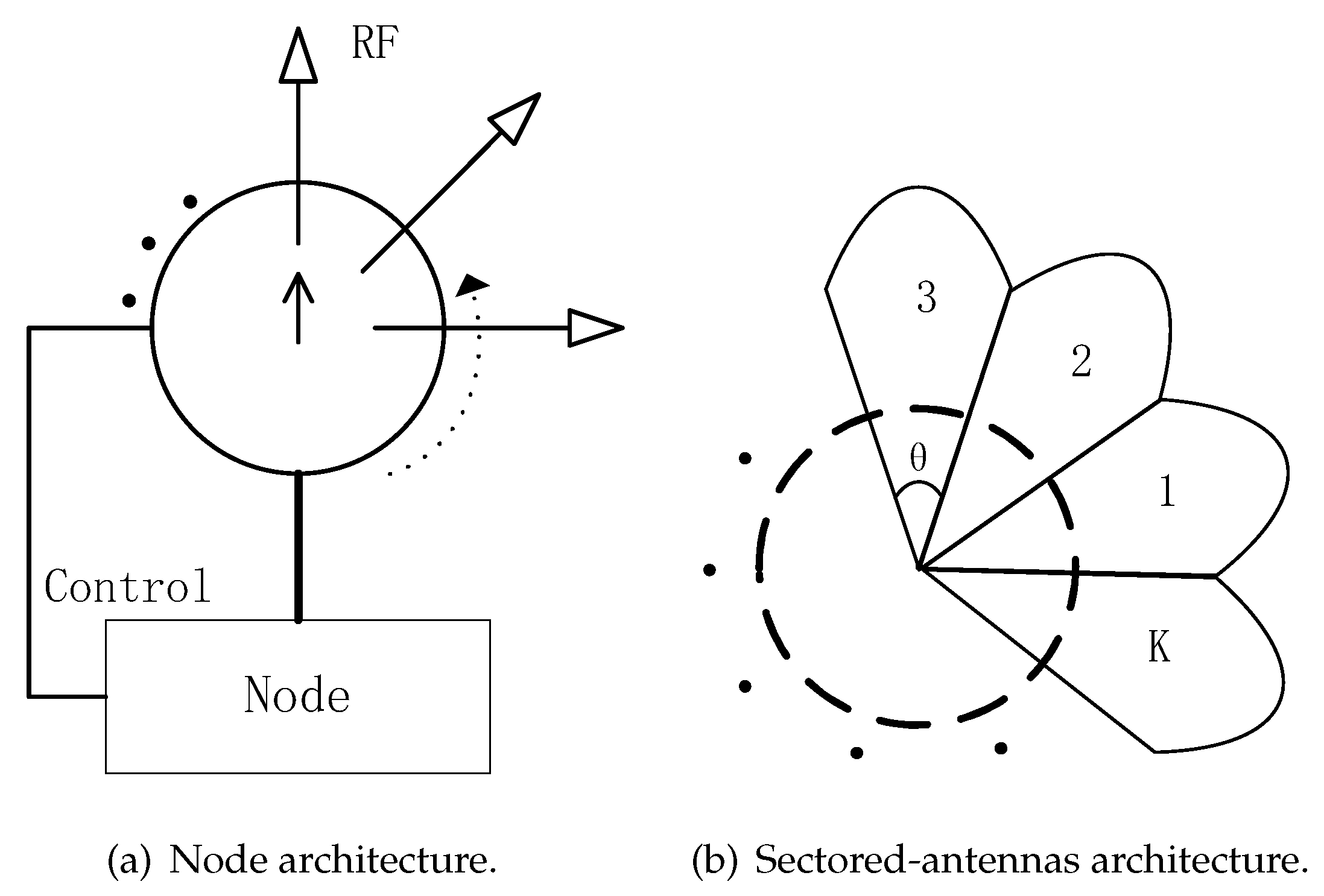
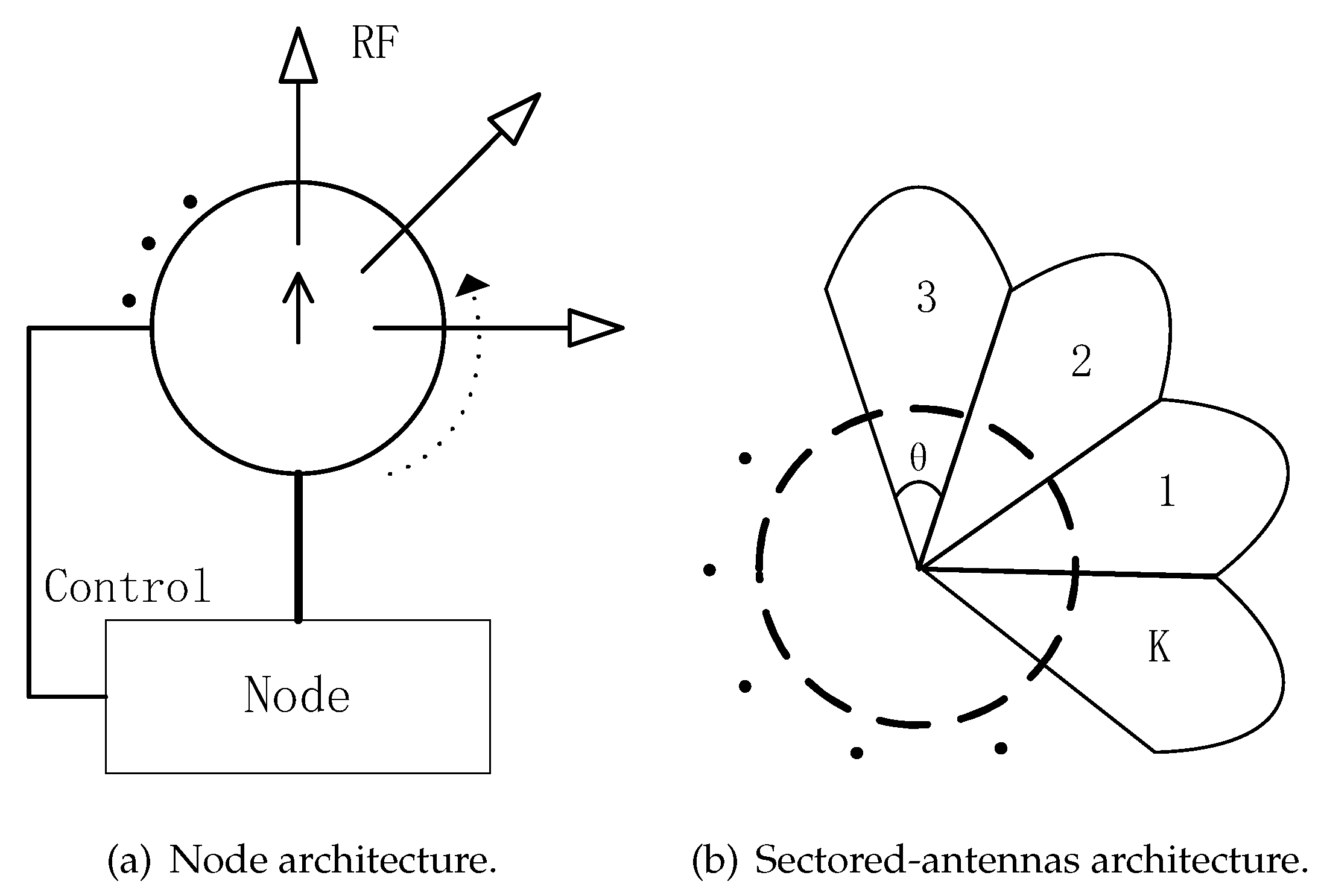
2.1. System Model of Traditional SBA Algorithm
2.2. Motivation
- The first “link collision” problem: during the first handshake step, there are multiple nodes in the transmitting mode in the reception beam of one node in the receiving mode. If the direction of multiple transmitting nodes’ beams is opposite to the direction of the receiving node’s beam and these nodes in transmitting mode transmit SREQ frames at the same time, the node in receiving mode will not receive any SREQ frame successfully. As shown in Figure 4, the beams of nodes A and B are in sector 1 and they transmit SREQ frames simultaneously. At this time, the beam of node C in sector 5 is opposite to the beams of nodes A and B, and it is in receiving mode. Because of the two nodes (nodes A and B) simultaneously transmitting SREQ frames in the receiving beam of node C, node C can not receive any SREQ frame. That is the first “link collision” problem in the previous SBA algorithms.
- The second “link collision” problem: when there are multiple nodes in the beam of the node in transmitting mode and they are in the receiving mode after the first handshake, they will reply SRES frames with the probability of 1 according to the SBA algorithm. Then these second handshake frames collided and resulted in the failure of discovery. As shown in Figure 5, node A successfully transmitted the first handshake frame (SREQ frame) to node B and C, and node B and C should reply the second handshake frame (SRES frame) to node A at the same time according to the SBA algorithm. The result is that the two SRES frames transmitted to node A collided and node A can not receive any SRES frame. That is the second “link collision” problem in the previous SBA algorithms.
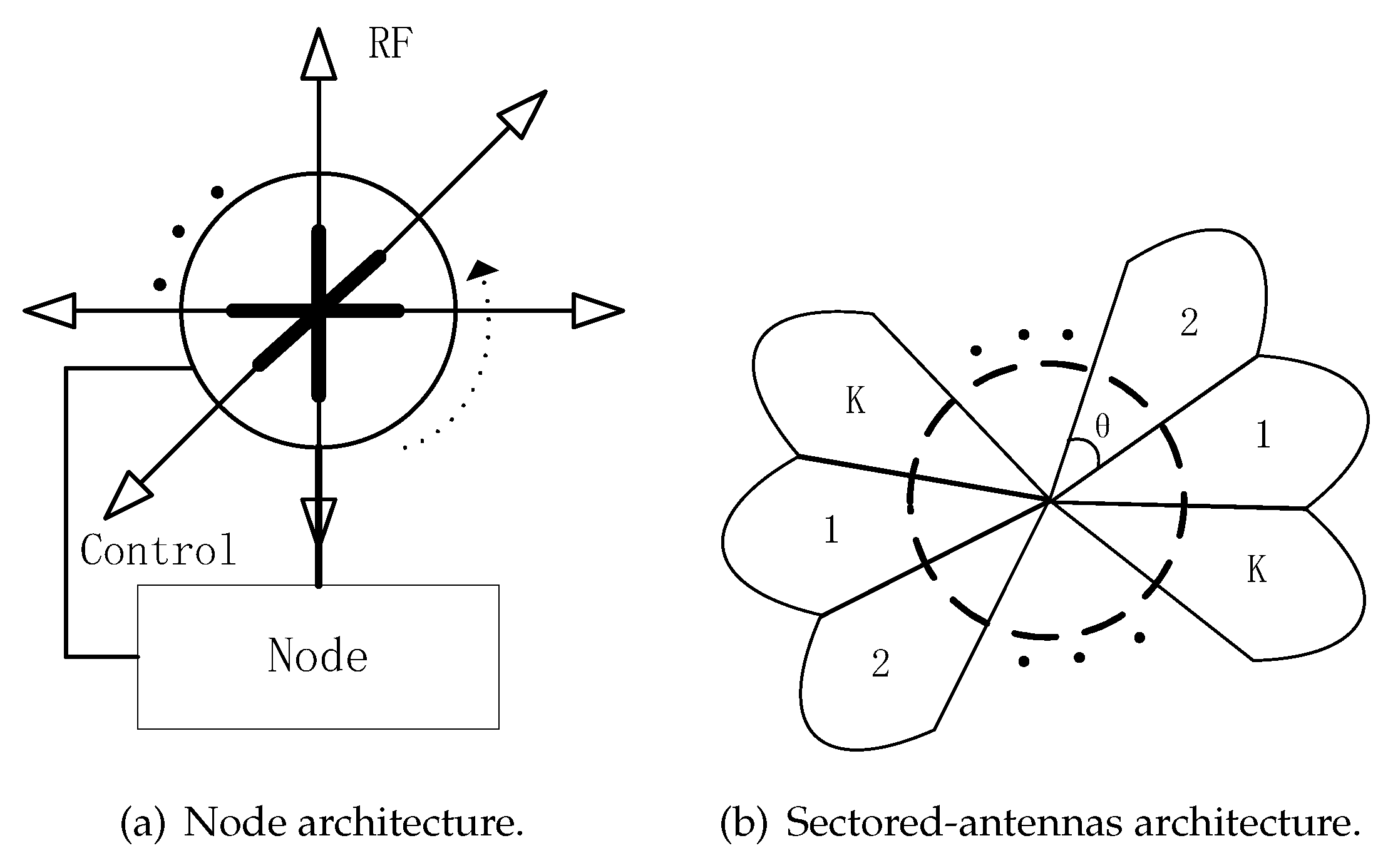
2.3. BD-SBA Algorithm Description
- As shown in Figure 7a, nodes A, B, C and D select a backoff counter value of 2, 2, 1, 1 within the range of [0,15] (assuming CW = 16) and start backoff, while performing physical carrier sense in the process of backoff.
- As shown in Figure 7b, node C and D backoff to 0 first. Since they don’t sense any physical energy during their backoff process, they set their own modes to transmitting, and then transmit SREQ frames in sectors 2 and 6 in opposite directions simultaneously.
- As shown in Figure 7c, subsequently, nodes A and B backoff to zero. Similarly, they transmit SREQ frames in sectors 2 and 6, respectively. At slot 0, node A, B, C and D do not receive any SRES frame because there are no nodes’ beams pointing to each other. Therefore, no neighbor nodes are discovered at slot 0.
- As shown in Figure 7d, nodes A, B, C and D have rotated their bi-directional antennas clockwise 45 degrees when slot = 1. Their beam sectors are located in sectors 1 and 5 respectively, and the backoff counter values of 1, 3, 5, 7 are randomly selected. They start their backoff and physical carrier sensing.
- As shown in Figure 7e, node A backoff to 0 first, setting its own mode to transmitting, and transmit SREQ frame in its bi-directional beam sector 1 and 5. Nodes B, C and D are performing physical carrier sensing and are in receiving mode. They receive SREQ frames transmitted by node A in their sector 5, 1, 1. So that node B, C and D discover node A and prepare to reply SRES frames.
- As shown in Figure 7f, mini-slots has passed ( is the number of mini-slots of SREQ frame), and nodes B, C and D have received SREQ frame, then they set their own modes to transmitting, and randomly select a time-frequency resource block to reply SRES frame in their respective sectors 5, 1 and 1. At this time, node A sets its own mode to receiving and receives SRES frames in sector 5 and 1. Then node A can discovered node B, C and D.
2.4. Detailed Procedure of BD-SBA Algorithm
- Step 1—backoff and bi-directional carrier sense:Firstly, the node carries out the backoff process based on bi-directional carrier sense. The node randomly chooses a BC value in the range of [0, CW-1] and begin backoff. In the process of backoff, if the node do not listen to any physical energy transmitted by other nodes in its sector, it sets its mode to transmitting. Otherwise, it set its mode to receiving.
- Step 2—broadcasting SREQ frame:All nodes in the transmitting mode broadcast SERQ frames in their sectors while all nodes in the receiving mode ready to receive these SERQ frames. The SREQ frame contains the identification and the sector index of transmitting node. SREQ frames contain mini-slots.
- Step 3—replying SRES frame:All the nodes that successfully receive SREQ frames must reply SRES frames with the probability of 1. These nodes randomly select a time-frequency resource block to reply SRES frames from multiple subchannels and multiple sub-slots. As shown in Figure 8, the subchannel1-1, subchannel1- and subchannel2-2 time-frequency resource blocks are selected to reply SRES frames. In this case, there is no collision. The SRES frame contains the identification and the sector index of transmitting SREQ frame node. After successfully receiving the SRES frame, nodes will update its neighbor list. SRES frames contain mini-slots and resource blocks on the time axis. The number of subchannels can be set flexibly according to the requirement and complexity of equipment.
- Step 4—acknowledging SACK frame:After receiving the SRES frame, the node should reply the SACK frame. SACK frame contain mini-slots. Then, the entire three-way handshake process is completed.
| Algorithm 1 Bi-Directional Scan-Based Algorithm (BD-SBA) Algorithm. |
Initialization: Set mini-slot counter (MSC) = 0, BC = 0, mode = recv and initialize CW, , , , and ; /* The “recv” means the mode of receiving, and the “tran” means the mode of transmitting. MSC is the mini-slot counter. BC is the value of the backoff counter, which is randomly selected between 0 and CW-1. */
|
2.5. The Implementation Issues of BD-SBA Algorithm
- Compared with the traditional neighbor discovery algorithm, our BD-SBA algorithm adopts bi-directional antennas with synchronous rotation, which increases the complexity of the antenna feeder subsystem of the node.
- Our algorithm requires two sets of transceivers to simultaneously listen on the whole channel and transmit and receive data on multiple sub-channels.
- Due to the adoption of backoff and multi-slot mechanism in BD-SBA algorithm, the number of the mini-slots is more than that of traditional algorithm. The difference between them is .
3. Algorithm Analysis
3.1. Theoretical Model
- The probability that node i is in transmitting mode is ;
- The probability that node j is in receiving mode is ;
- nodes in the sector of receiving node j are all in the receiving mode except node i, otherwise the collision of transmitting SREQ frames will occur, the probability is ;
- Node j randomly selects a time frequency resource block to transmit SRES frame, and the probability not conflict with other nodes is , where is the number of time frequency resource blocks, and these “other nodes” do not include node i and the found nodes already.
- The number of nodes M in one sector is very sensitive to the SBA algorithm, the main reason is that is not a small value (such as setting to 0.5), then the impact of M-power operation of is great; But the in is a small value when (for example, when is 16, M is 4, is 0.0825), so the M-power operation has little effect. While and of two algorithms are the key factors that affect the collision of SREQ frames;
- The discovery probability of BD-SBA algorithm does not change much when change from 8 to 16, so long as the number of time-frequency resource blocks is not too small. That means our BD-SBA algorithm has a high probability of receiving SRES frame (from Equation (3) when , , , the probability is 0.824), but if there are more than two nodes in one sector in the SBA algorithm, the collision of receiving SRES frames occur;
- From the theoretical point of view, the and in Equation (3) are exactly the key to overcome the two kinds of “link collision” problems of SBA algorithm.
3.2. Validation of Theoretical Model
- Node i discovers m nodes in previous scans, and in scan, none of the remaining nodes is discovered.
- Node i discovers node in previous scans and any another node is discovered in the remaining node in the scan.
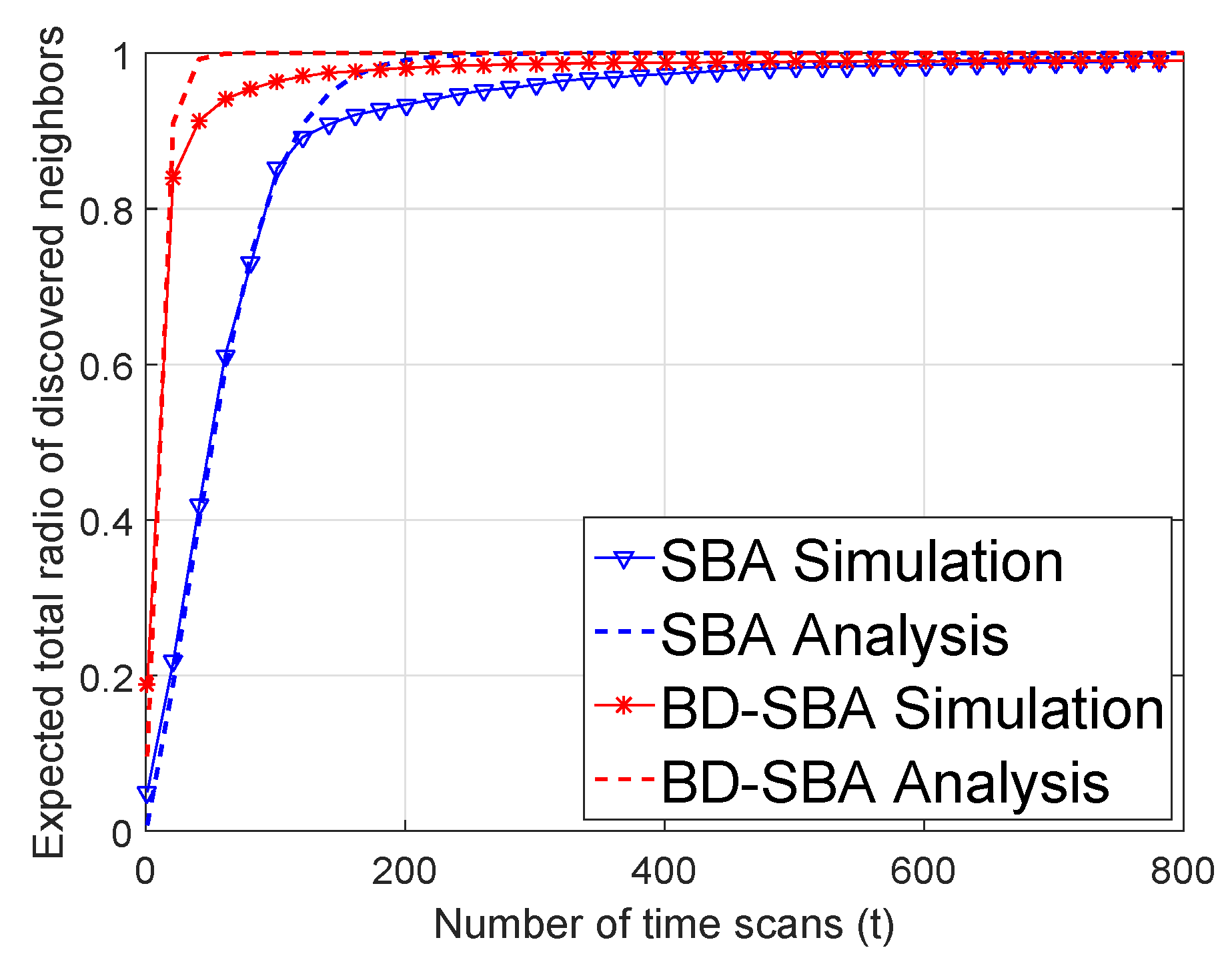
4. Simulation Results and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Haas, Z.J.; Deng, J.; Liang, B.; Papadimitratos, P.; Sajama, S. Wireless ad hoc Networks; Encyclopedia of Telecommunications: Hoboken, NJ, USA, 2003; pp. 1329–1332. [Google Scholar]
- Own, C.M.; Meng, Z.; Liu, K. Handling Neighbor Discovery and Rendezvous Consistency with Weighted Quorum-Based Approach. Sensors 2015, 15, 22364–22377. [Google Scholar] [CrossRef] [PubMed]
- Ramanathan, R. On the performance of ad hoc networks with beamforming antennas. In Proceedings of the 2nd ACM International Symposium on Mobile ad hoc Networking & Computing, Long Beach, CA, USA, 4–5 October 2001; pp. 95–105. [Google Scholar]
- Wu, Z.; Qiu, Z. A Survey on Directional Antenna Networking. In Proceedings of the 7th International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–25 September 2011; pp. 1–4. [Google Scholar]
- Vasudevan, S.; Kurose, J.; Towsley, D. On neighbor discovery in wireless networks with directional antennas. In Proceedings of the INFOCOM 2005, Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; Volume 4, pp. 2502–2512. [Google Scholar]
- Jakllari, G.; Luo, W.; Krishnamurthy, S.V. An Integrated Neighbor Discovery and MAC Protocol for Ad Hoc Networks Using Directional Antennas. IEEE Trans. Wirel. Commun. 2005, 6, 1024–1114. [Google Scholar] [CrossRef]
- Park, J.S.; Cho, S.W.; Sanadidi, M.Y.; Gerla, M. An analytical framework for neighbor discovery strategies in ad hoc networks with sectorized antennas. IEEE Commun. Lett. 2009, 13, 832–834. [Google Scholar] [CrossRef]
- An, X.; Prasad, R.V.; Niemegeers, I. Impact of Antenna Pattern and Link Model on Directional Neighbor Discovery in 60 GHz Networks. IEEE Trans. Wirel. Commun. 2011, 10, 1435–1447. [Google Scholar]
- Du, J.; Kranakis, E.; Morales-Ponce, O.; Rajsbaum, S. Neighbor Discovery in a Sensor Network with Directional Antennae. Algorithms Sens. Syst. 2011, 57–71. [Google Scholar] [CrossRef]
- Zhang, Z. DTRA: Directional transmission and reception algorithms in WLANs with directional antennas for QoS support. IEEE Netw. Mag. Glob. Internetw. 2005, 19, 27–32. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B. Neighbor discovery in mobile ad hoc self-configuring networks with directional antennas: Algorithms and comparisons. IEEE Trans. Wirel. Commun. 2008, 7, 1540–1549. [Google Scholar] [CrossRef]
- Xiong, W.; Liu, B.; Gui, L. Neighbor Discovery with Directional Antennas in Mobile Ad-Hoc Networks. In Proceedings of the Global Telecommunications Conference, Kathmandu, Nepal, 5–9 December 2011; pp. 1–5. [Google Scholar]
- Cai, H.; Liu, B.; Gui, L.; Wu, M.Y. Neighbor discovery algorithms in wireless networks using directional antennas. In Proceedings of the IEEE International Conference on Communications, Ottawa, ON, Canada, 10–15 June 2012; pp. 767–772. [Google Scholar]
- Chen, L.; Li, Y.; Vasilakos, A.V. On Oblivious Neighbor Discovery in Distributed Wireless Networks with Directional Antennas: Theoretical Foundation and Algorithm Design. IEEE/ACM Trans. Netw. 2017, 25, 1982–1993. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, B.; Gui, L. Adaptive Scan-based Asynchronous Neighbor Discovery in wireless networks using directional antennas. In Proceedings of the International Conference on Wireless Communications & Signal Processing, Hangzhou, China, 24–26 October 2013; pp. 1–6. [Google Scholar]
- Murawski, R.; Felemban, E.; Ekici, E.; Park, S.; Yoo, S.; Lee, K.; Park, J.; Mir, Z.H. Neighbor discovery in wireless networks with sectored antennas. Ad Hoc Netw. 2012, 10, 1–18. [Google Scholar] [CrossRef]
- Li, X.; Lin, Y.; Gong, S.X.; Yang, Y.J. Bidirectional High Gain Antenna for WLAN Applications. Prog. Electromagnet. Res. Lett. 2009, 6, 99–106. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, X.M.; Liu, J.S.; Wu, Q.F.; Ying, T.; Jin, H. Dual-band bidirectional high gain antenna for WLAN 2.4/5.8 GHz applications. Electron. Lett. 2008, 45, 6–7. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Hasuike, K.; Horisawa, S.; Tawara, S. An adaptive MAC protocol for wireless ad hoc community network (WACNet) using electronically steerable passive array radiator antenna. In Proceedings of the IEEE Global Communications Conference, San Antonio, TX, USA, 25–29 November 2001; Volume 5, pp. 2896–2900. [Google Scholar]
- Capone, A.; Martignon, F.; Fratta, L. Directional MAC and routing schemes for power controlled Wireless Mesh Networks with adaptive antennas. Ad Hoc Netw. 2008, 6, 936–952. [Google Scholar] [CrossRef]
- Zheng, K.; Zhao, L.; Mei, J.; Shao, B.; Xiang, W.; Hanzo, L. Survey of Large-Scale MIMO Systems. IEEE Commun. Surv. Tutor. 2015, 17, 1738–1760. [Google Scholar] [CrossRef]
- IEEE. IEEE 802.11ax (D3.0) Draft Standard for Information Technology Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks Specific Requirements-Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; LAN/MAN Standards Committee of the IEEE Computer Society: New York, NY, USA, 2018. [Google Scholar]
- Camp, T.; Boleng, J.; Davies, V. A Survey of Mobility Models for Ad Hoc Network Research. Wirel. Commun. Mob. Comput. 2010, 2, 483–502. [Google Scholar] [CrossRef]
- Bai, Z.; Li, B.; Yan, Z.; Yang, M.; Jiang, X.; Zhang, H. A Classified Slot Re-allocation Algorithm for Synchronous Directional Ad Hoc Networks. In Quality, Reliability, Security and Robustness in Heterogeneous Systems; Springer International Publishing: Ho Chi Minh City, Vietnam, 2018; pp. 194–204. [Google Scholar]
- Liang, Y.; Li, B.; Yan, Z.; Yang, M.; Jiang, X.; Zhang, H. Collision Scattering Through Multichannel in Synchronous Directional Ad Hoc Networks. In Quality, Reliability, Security and Robustness in Heterogeneous Systems; Springer International Publishing: Ho Chi Minh City, Vietnam, 2018; pp. 183–193. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Discover Radio | Sector Degree | SBA | BD-SBA |
|---|---|---|---|
| 80% nodes | 30 | 13 | |
| 60 | 15 | ||
| 145 | 21 | ||
| 1570 | 28 | ||
| 98% nodes | 250 | 230 | |
| 700 | 233 | ||
| 1840 | 235 | ||
| 5230 | 240 |
| Discover Radio | Node Density | SBA | BD-SBA |
|---|---|---|---|
| 80% nodes | 30 | 13 | |
| 55 | 15 | ||
| 105 | 18 | ||
| 130 | 20 | ||
| 300 | 25 | ||
| 98% nodes | 423 | 265 | |
| 650 | 268 | ||
| 1245 | 270 | ||
| 2300 | 272 | ||
| 4650 | 275 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, A.; Li, B.; Yan, Z.; Yang, M. A Bi-Directional Carrier Sense Collision Avoidance Neighbor Discovery Algorithm in Directional Wireless Ad Hoc Sensor Networks. Sensors 2019, 19, 2120. https://doi.org/10.3390/s19092120
Yang A, Li B, Yan Z, Yang M. A Bi-Directional Carrier Sense Collision Avoidance Neighbor Discovery Algorithm in Directional Wireless Ad Hoc Sensor Networks. Sensors. 2019; 19(9):2120. https://doi.org/10.3390/s19092120
Chicago/Turabian StyleYang, Annan, Bo Li, Zhongjiang Yan, and Mao Yang. 2019. "A Bi-Directional Carrier Sense Collision Avoidance Neighbor Discovery Algorithm in Directional Wireless Ad Hoc Sensor Networks" Sensors 19, no. 9: 2120. https://doi.org/10.3390/s19092120
APA StyleYang, A., Li, B., Yan, Z., & Yang, M. (2019). A Bi-Directional Carrier Sense Collision Avoidance Neighbor Discovery Algorithm in Directional Wireless Ad Hoc Sensor Networks. Sensors, 19(9), 2120. https://doi.org/10.3390/s19092120