1. Introduction
The gearbox is widely used for mechanical power transmission in industries such as petroleum equipment, mining machines, chemical industry, and railway applications [
1,
2]. Because of harsh operating conditions and inherent manufacturing imperfection, gearboxes can be prone to a variety of premature faults and failures. Timely detection and diagnosis of these faults by performing condition monitoring will avoid any catastrophic failures and major economic losses, and ensure their safe operation [
3,
4].
A variety of signals have been investigated for the condition monitoring (CM) of gearboxes [
5,
6,
7,
8,
9], including vibration signal [
10,
11,
12], current signal [
9], acoustic emission signal [
13,
14,
15], sound signal [
16], torque signal [
17], and rotating encoder signal [
18] and so on. Among these sensor signals, the vibration-based diagnostic method is the most commonly researched because it can directly represent the dynamic behavior of rotating machines [
19,
20,
21].
However, vibration-based methods can have many intrinsic shortages, including requiring contact measurement, providing only localized information, noise contamination, and high computation costs, making it difficult to be a cost-effective CM technique [
22]. Moreover, an accelerometer is not allowed in many industrial applications [
18]. For these reasons, significant progress has been made in the search for an alternative sensing technique to monitor the health condition of gearboxes.
Recently, temperature signal has gained noticeable attention. The temperature signal is often collected using a thermocouple. Since the fault can cause the temperature of machinery increase, recent research has shown the temperature signal carries rich diagnostic information for CM of rotating machinery [
23,
24,
25]. The thermal camera, as an IRT image-measuring device, can measure the surface temperature of the object without contact. As a result, the infrared thermal (IRT)-based remote CM technique has attracted many researchers’ attention [
26]. Lim et al. proposed a fault diagnosis method using IRT images along with support vector machine (SVM) to identify machinery faults [
26]. Glowacz et al. introduced a novel method for area selection of IRT image differences as the fault features for fault diagnosis of induction motors [
22]. Younus Janssens et al. developed an IRT-based intelligent fault diagnosis method of rotating machinery using discrete wavelet transform, feature selection tool and two classifiers [
27]. Janssens et al. combined the three features extracted from IRT images with a SVM to conduct the fault diagnosis of rolling bearings [
28]. Meanwhile, the Gini coefficient and machine learning methods are applied for early fault detection of rotating machinery using IRT images by Janssens et al. [
29]. From the above literature review, we find that IRT images can provide an alternative and non-invasive way for remote monitoring of rotating machinery [
30].
However, the feature-extraction methods mentioned above are handcrafted. The feature designing requires a considerable amount of engineering skills and domain expertise, which significantly influences the description ability and final classification results. In particular, when the IRT images become more challenging, the representational ability of those features may become limited or even powerlessness.
To overcome the shortages of handcrafted features, deep-learning features, which are automatically trained from images using deep-learning methods, are considered to be a more feasible strategy. The key advantage of deep-learning methods is that the deep-learning features are automatically taught from images, instead of relying on manually designed features. Convolutional neural network (CNN) is an effective deep-learning method to extract the features of raw data automatically [
31]. CNN can extract the features from the images directly, which avoids the information loss brought by artificial processing. Meanwhile, convolution and pooling are the key operations of CNN, in which convolution is used to extract local image features and pooling is employed to reduce data dimension. Therefore, CNN has far fewer connections and parameters, which results in a system that is easier to train [
32,
33]. In this paper, CNN is employed for fault-feature extraction.
After the fault-feature extraction using CNN, a classifier is usually required to classify different fault types. In this paper, SoftMax regression (SR) is trained to automatically identify various health conditions. SR is an expansion of logistic regression for multi-classification problems, which has been applied in many fields such as speech emotion recognition [
34], facial emotion recognition [
35], and text classification [
36]. Moreover, SR has a higher calculation efficiency, which is easy to implement [
37,
38,
39].
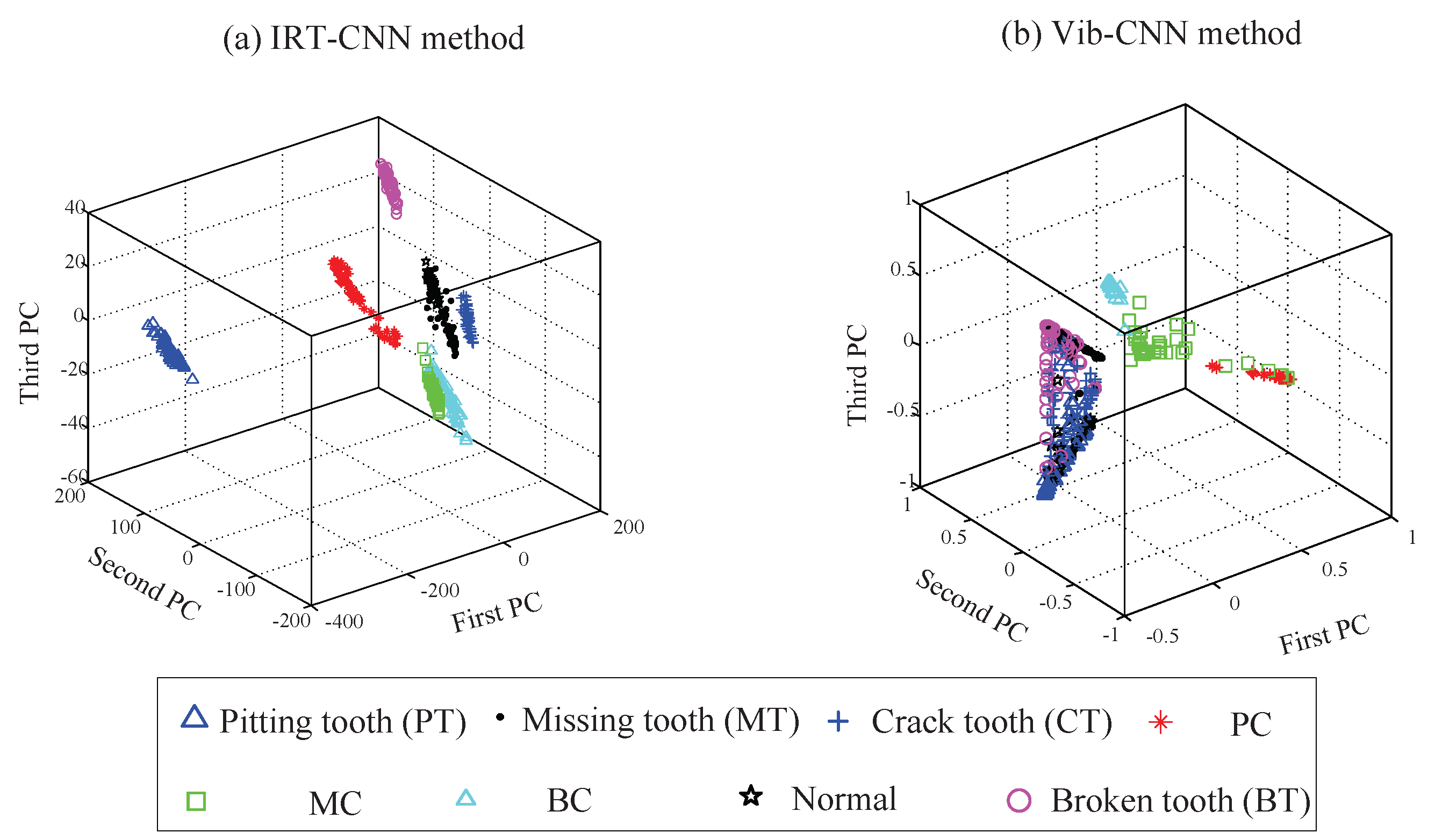
Based on these distinctive merits of IRT images and CNN, a novel method of using IRT images with CNN and SR, abbreviated to IRT–CNN, is proposed in this study to achieve online remote CM of gearboxes. To demonstrate the superiority of using IRT images, the vibration signal is also implemented using CNN method (denoted as Vib-CNN). The rest of this paper is organized as follows: In
Section 2, the theoretical background of CNN and SR is reviewed. In
Section 3, the fundamental of SR is briefly introduced. In
Section 4, the steps of the proposed IRT–CNN method are given. In
Section 5, the proposed method is used to classify types of various common gear faults. Finally,
Section 6 draws a conclusion.
3. SoftMax Regression
To identify and diagnose multiple fault types (more than 2 types) which often can occur in gearboxes, SoftMax regression (SR) is adopted as the classifier after the final layer in CNN method. SR is an expansion of logistic regression for multi-classification problems. By estimating the probability of one sample belonging to each category label, SR guarantees better classification performance [
38]. Meanwhile, SR is easy to implement with high computation efficiency [
38].
Figure 2 illustrates a SR classification model.
Let
represent the training set,
represent the training data, and
represent the corresponding health condition label. SR aims to estimate the probability
for the training data
belongs to each health condition label
The probability
can be obtained from the hypothesis function
as follows:
where the output value of the hypothesis function
is a
k dimensional vector
. It should be noted that the
normalizes the
thereby, the summation of the elements equals 1.
Based on the hypothesis function
, SR model is trained through successive adjustments to minimize the loss function of Equation (
7).
where
represents the indicator function. If the condition is true, returning 1, otherwise, returning 0.
4. IRT–CNN Method for Gearbox Diagnosis
By combining the capabilities of CNN and SR, it is relatively straightforward to construct a procedure to automatically identify IRT images and differentiate various gear fault cases. It consists mainly of two learning phases as shown in
Figure 3. The fittings phases are for applying CNN to raw IRT images to extract the discriminative features, which are followed by a SR with the features as input to classify the types of gear faults using the features. It is noteworthy that no expert knowledge of failure mechanisms and parameter setting are required beforehand for applying the proposed method, which makes it easy to implement in real applications.
To demonstrate the implementation of IRT–CNN method, this study follows a procedure as shown in
Figure 3, which may be described with five sequential steps starting with the bottom block of
Figure 3:
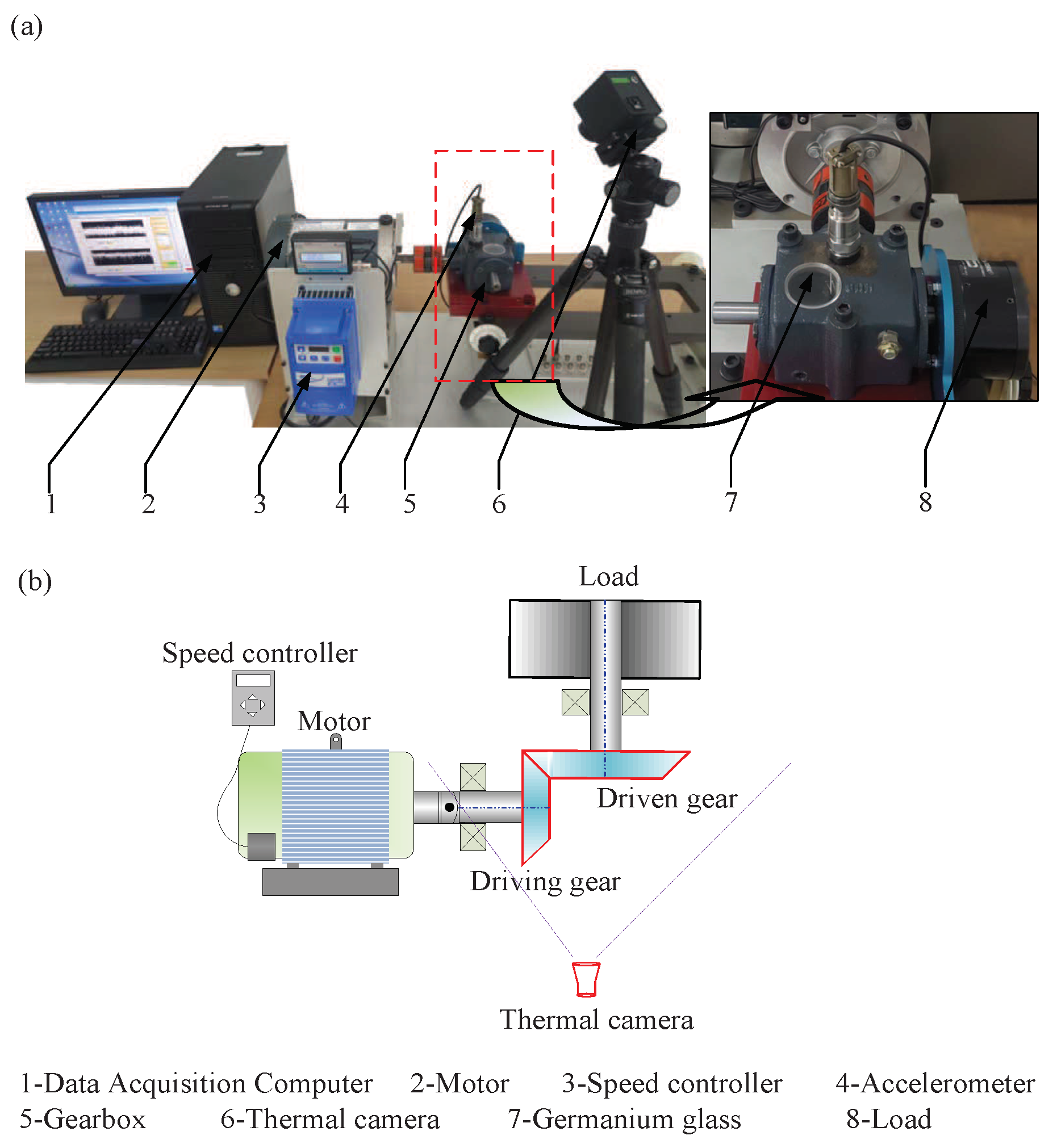
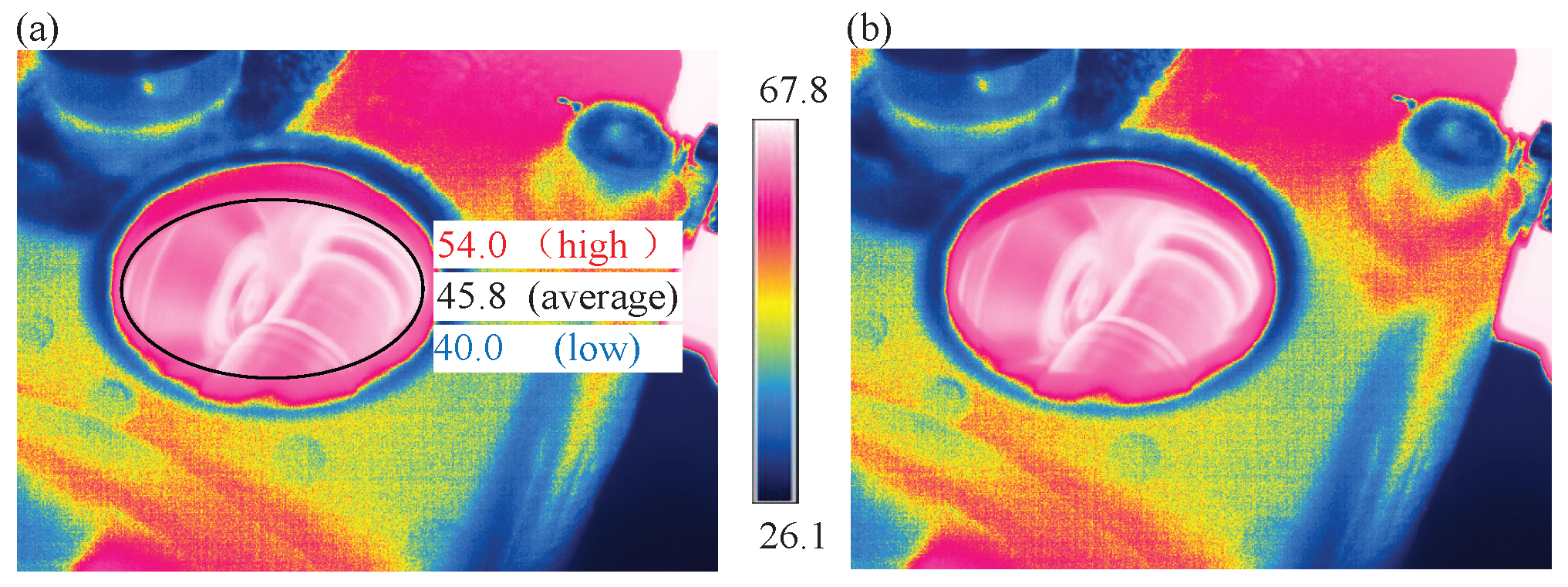
1: Collect the IRT video using the thermal camera with sufficient accuracy, for example, as specified in
Table 1;
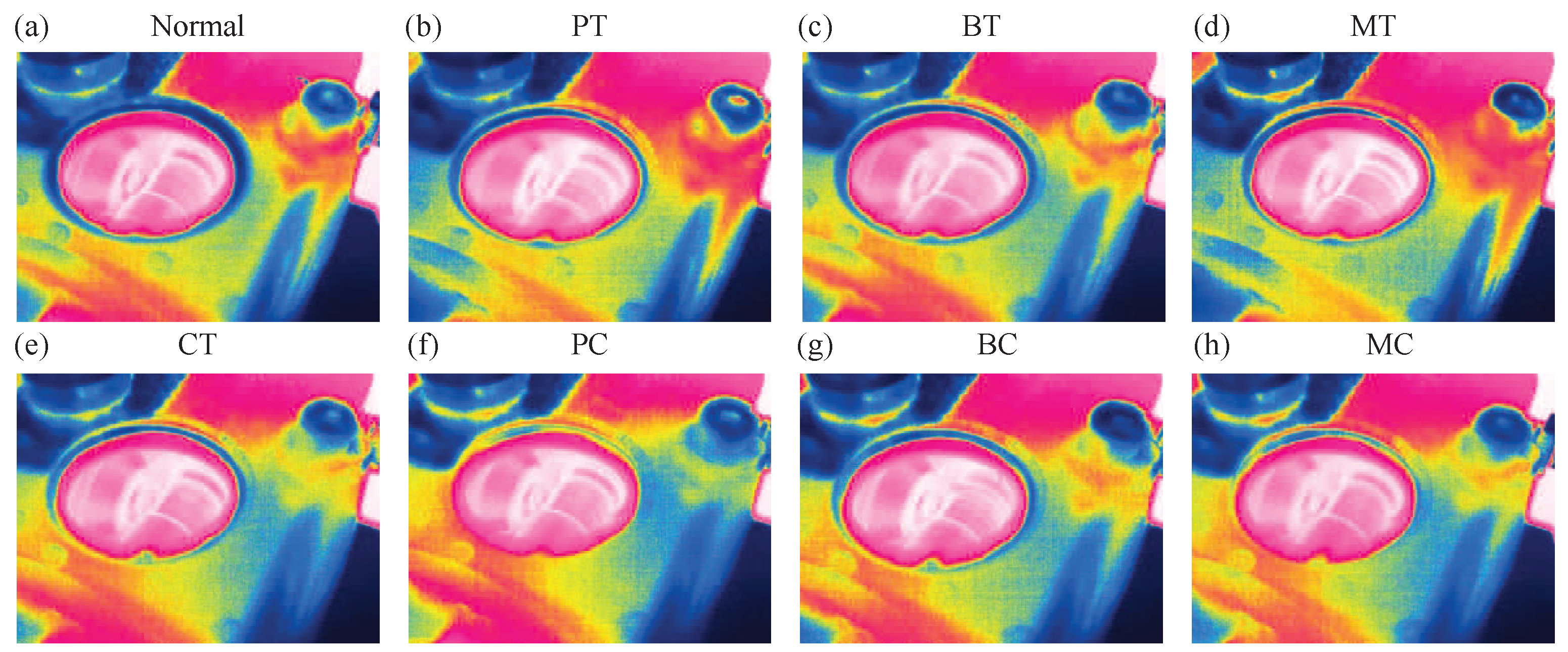
2: Select IRT images under each health condition of gearboxes;
3: Divide the images into training samples and testing samples;
4: Apply CNN to training samples to obtain a set of deep-learning features, which is then fed to SR to classify fault types;
5: Validate the classification performance of proposed IRT–CNN-based fault diagnosis method using the thermal images collected from a bevel gearbox.
6. Conclusions
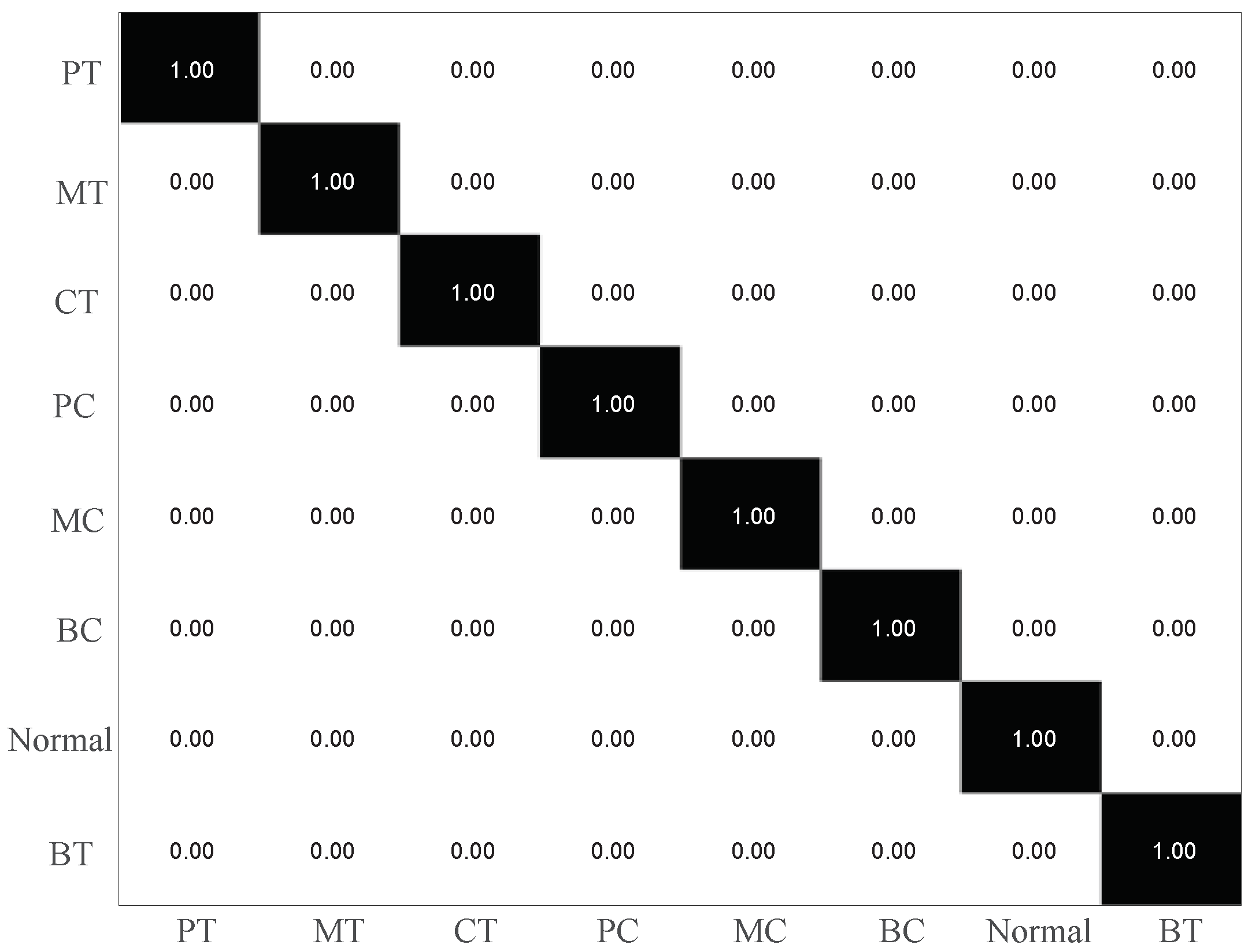
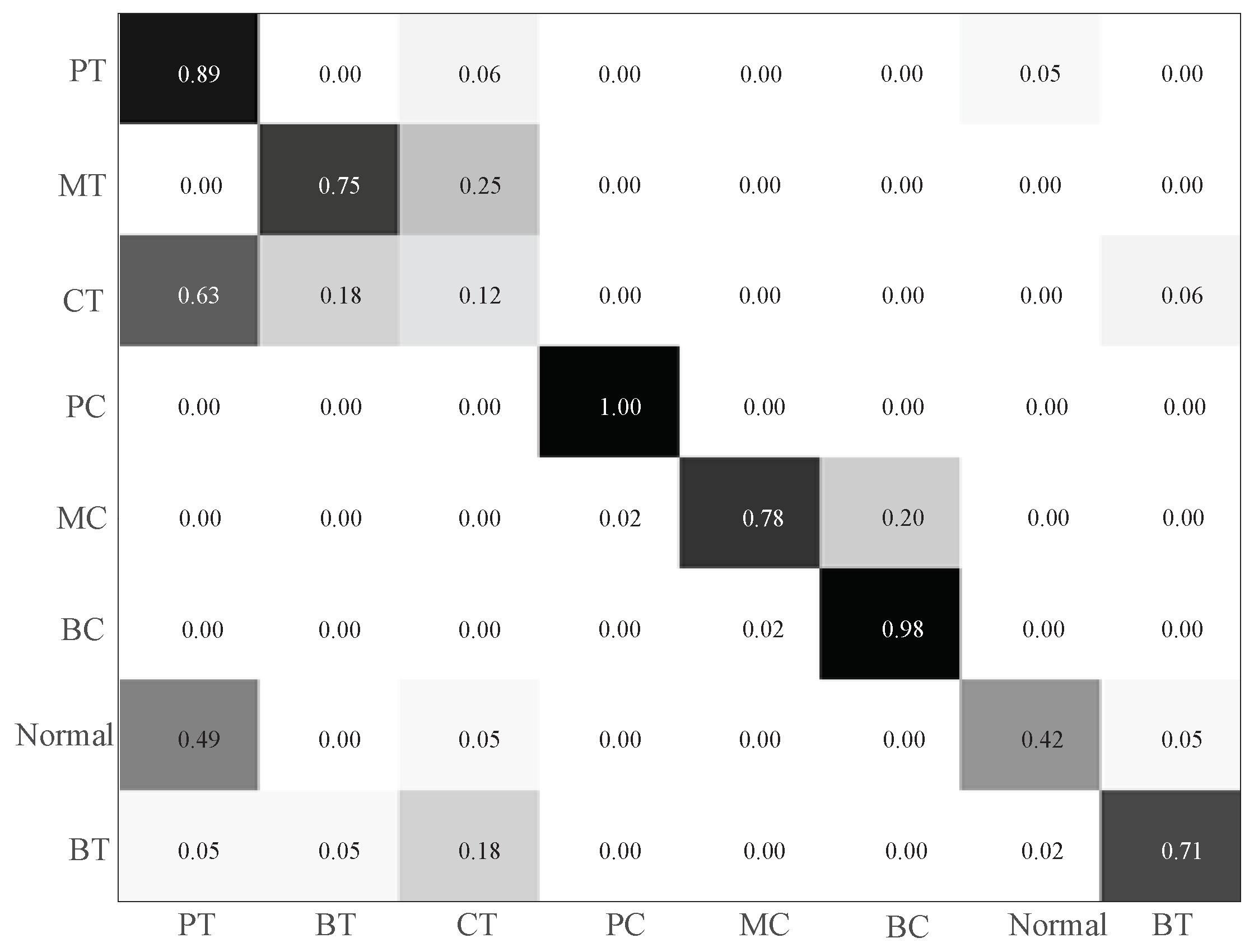
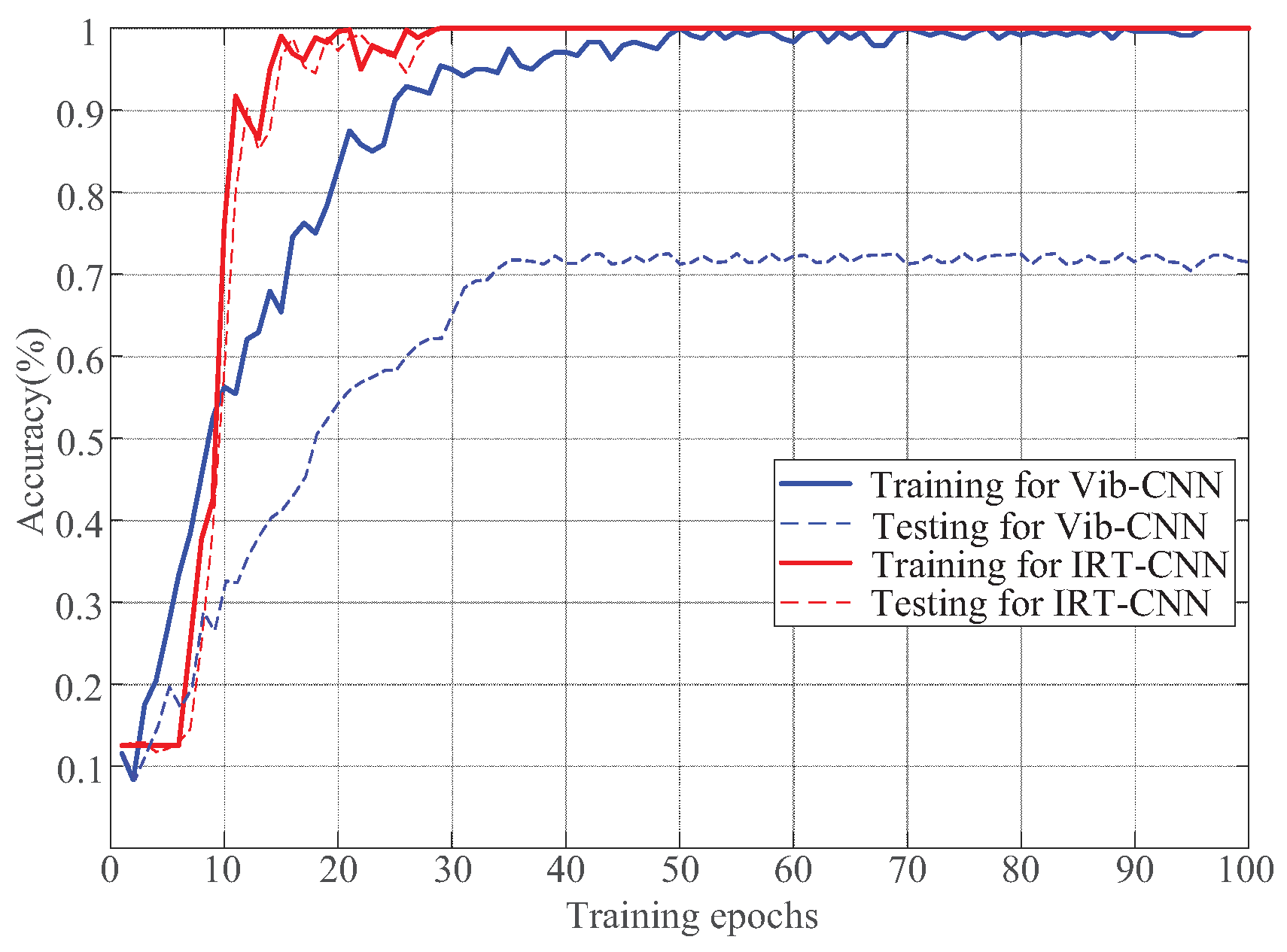
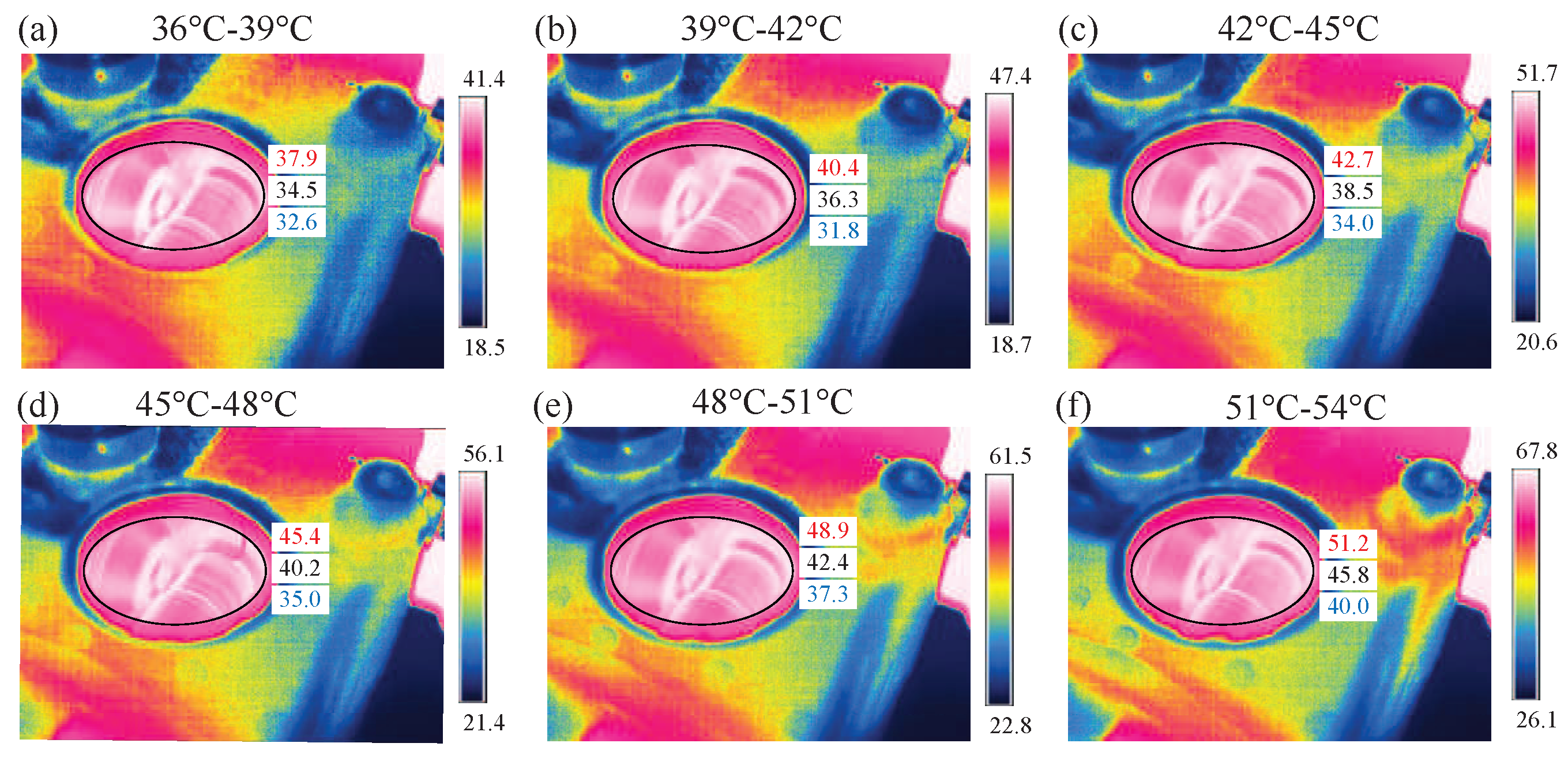
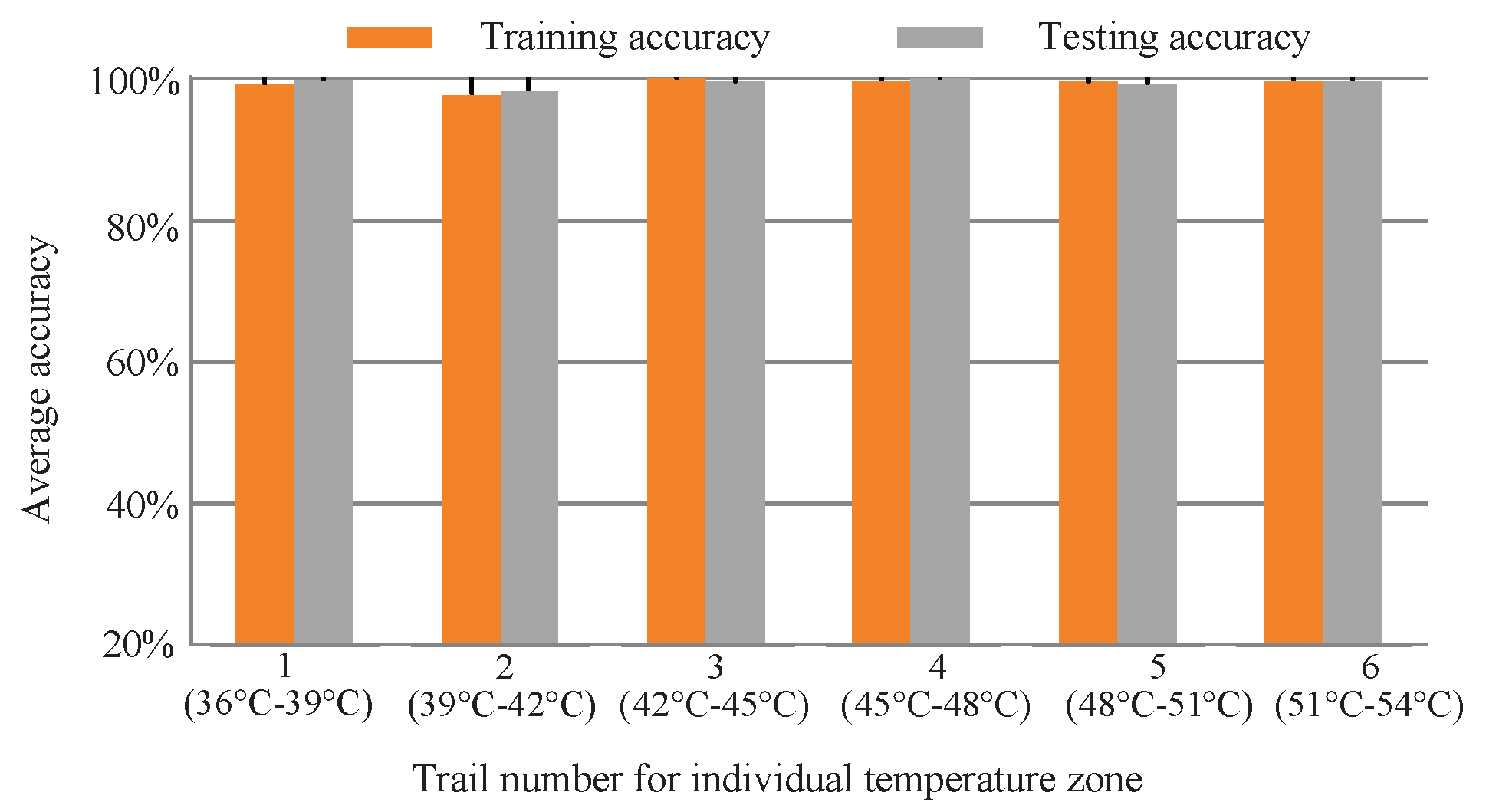
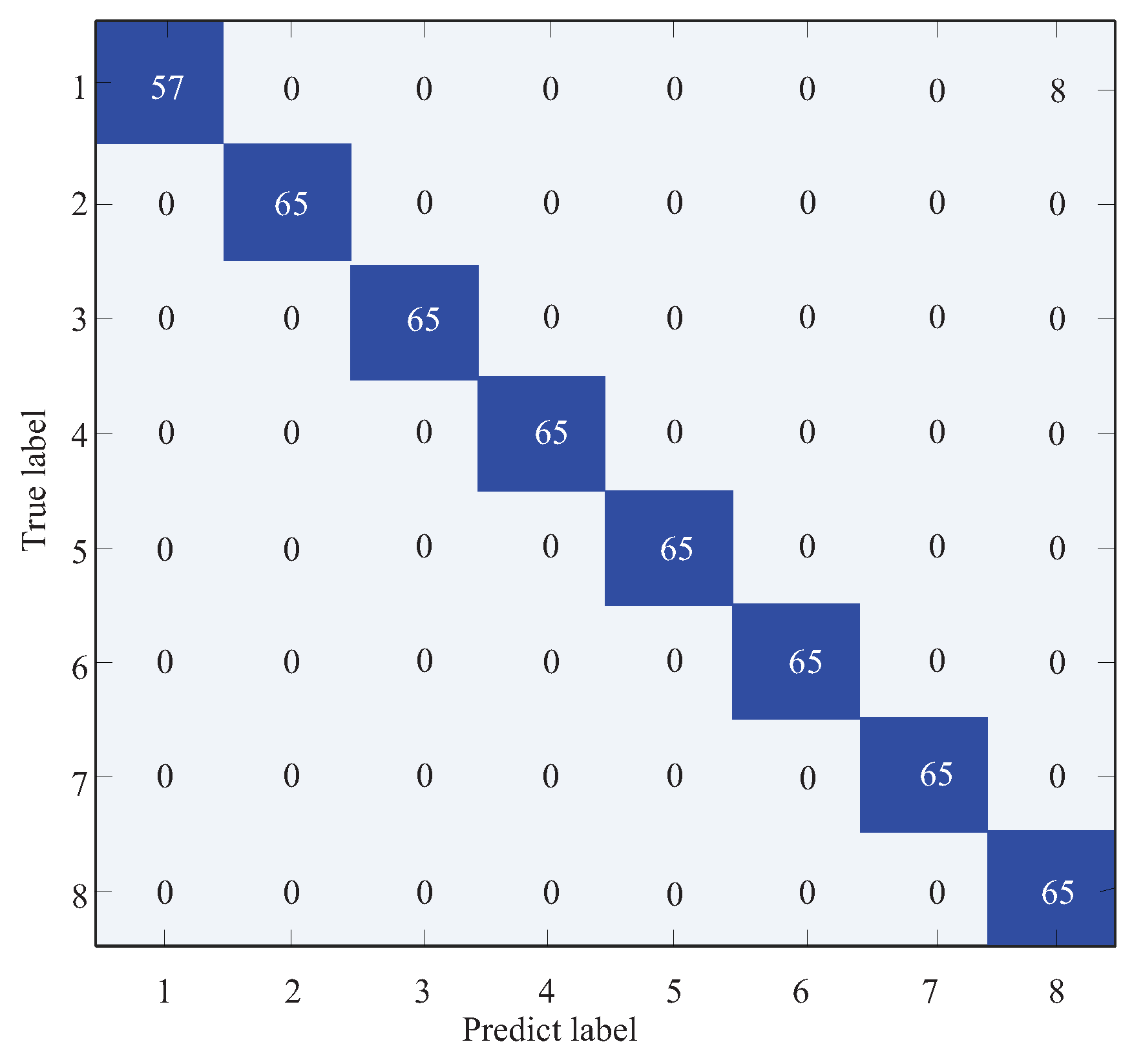
This paper develops a novel method for the CM of gearboxes using IRT images with CNN deep-leaning method (IRT–CNN). It combines the remote measurement merits of IRT images and automatic processing of CNN so that it can be more cost-effective and easily implemented. The effectiveness and reliability of the proposed IRT–CNN method is demonstrated using the IRT images collected from a bevel gearbox test rig. Results demonstrate that the proposed IRT–CNN is sensitive and reliable in recognizing several common gear faults, achieving a correct classification rate of 100% for IRT images acquired at specified temperatures of 95.97%, and 95.53% for the IRT with temperature ranges of 3 °C and 19 °C, replicating potential ambient temperature changes in real operational environments. Moreover, it also found that vibration signals with CNN can produce an identification rate of 71.53% for the constant temperature scenario, which is much lower that of IRT–CNN.
In this preliminary study, the proposed method has been demonstrated to be a promising tool for fault classification of a bevel gearbox using temperature signals. However, for other type machinery, such as motor faults, the effectiveness of the proposed method is unknown. Future work includes more validations on other machinery in a more realistic environment and deep analysis of fault mechanism using temperature signal.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}