Altering the Course of Technologies to Monitor Loosening States of Endoprosthetic Implants


 , ,
, , 
Abstract
:1. Introduction
2. Methods
2.1. Literature and Dataset Search
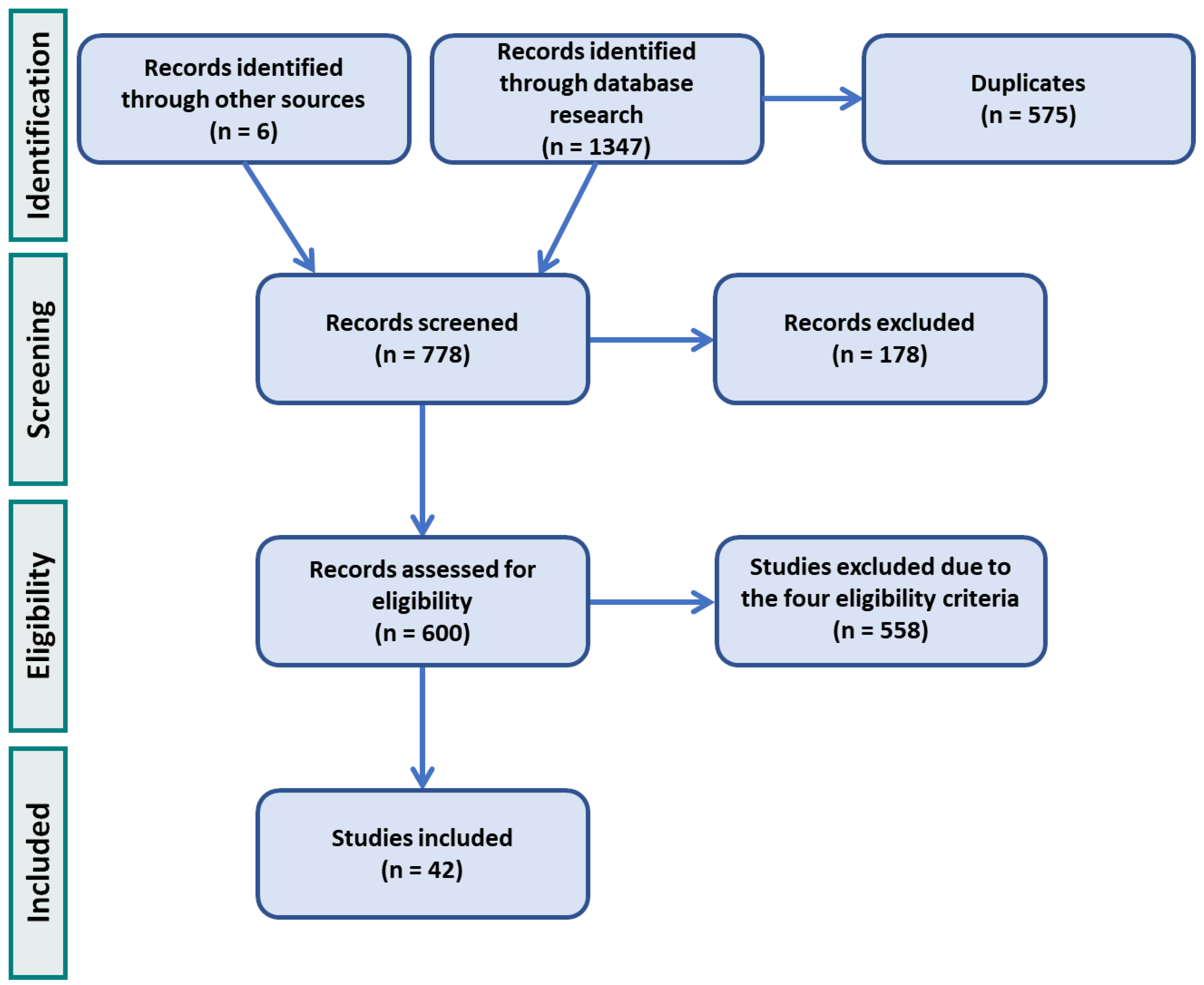
2.2. Screening of Studies
2.3. Eligibility Criteria
2.4. Data Items
2.5. Data Analyses
3. Results
3.1. The Vibrometric Approach to Monitor Implant Loosening States
3.1.1. Monitoring Methods and Technologies for Cementless Fixations
- (T1-L1)
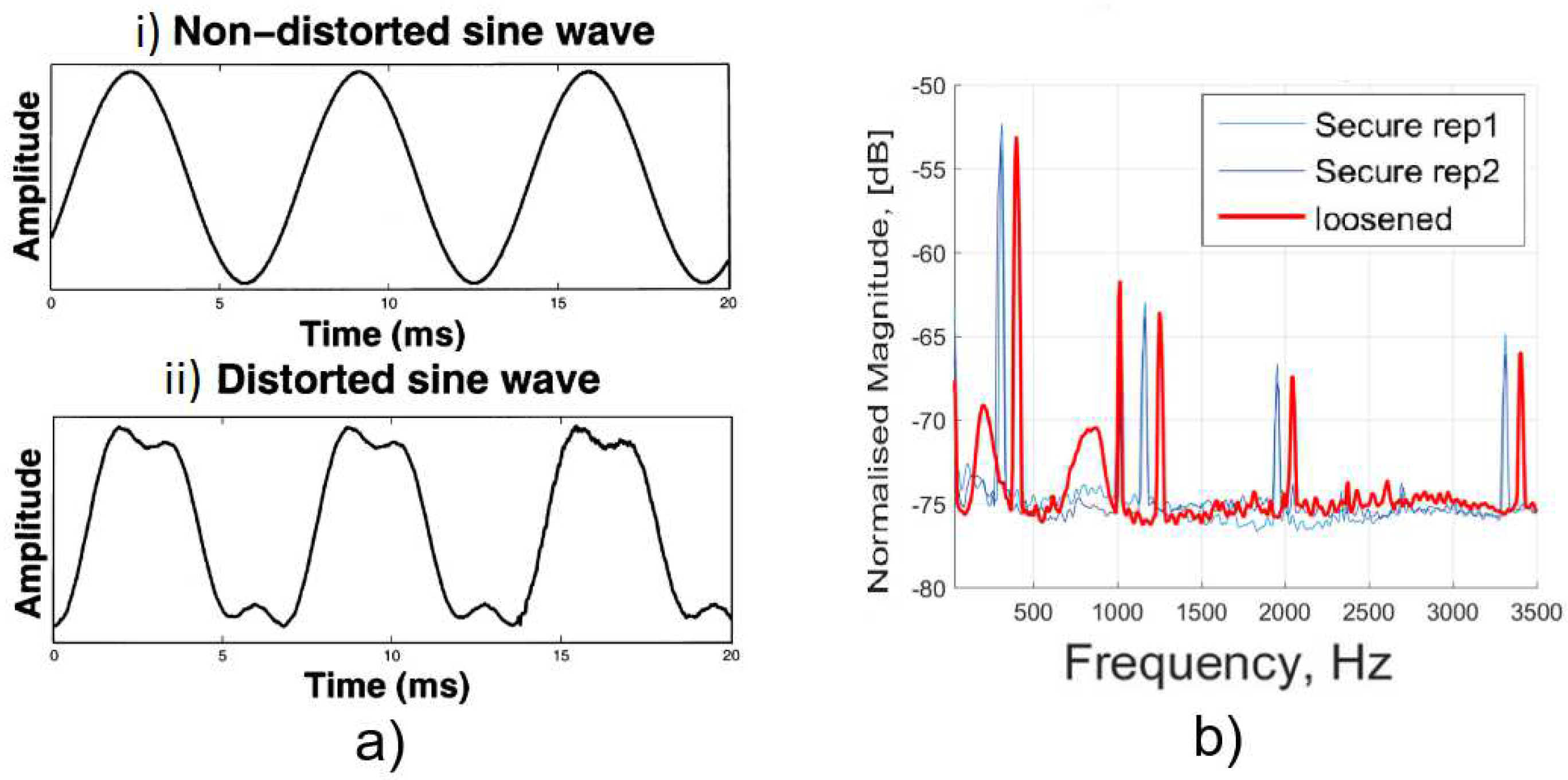
- Georgiou and Cunningham [32] designed a noninvasive technology to diagnose loosening of total hip replacements (stem and acetabular component). They use an extracorporeal shaker (excitations up to 1000 Hz) located in the knee (or near the distal femur condyle) and an extracorporeal accelerometer on the hip. The stability assessment of total hip replacements is performed by monitoring the waveform distortion (presence of harmonics) of the output acceleration signals. Only secure loose states can be detected. Loose implants are detected in three scenarios: (i) five or more harmonics, (ii) harmonics with amplitude higher than 50% of the fundamental frequency, and (iii) two or more resonant frequencies. The bone–implant integration failures are noticed in a large frequency range (up to 2000 Hz), and harmonics can emerge exceeding 100 Hz apart from the fundamental frequency.
- (T1-L2)
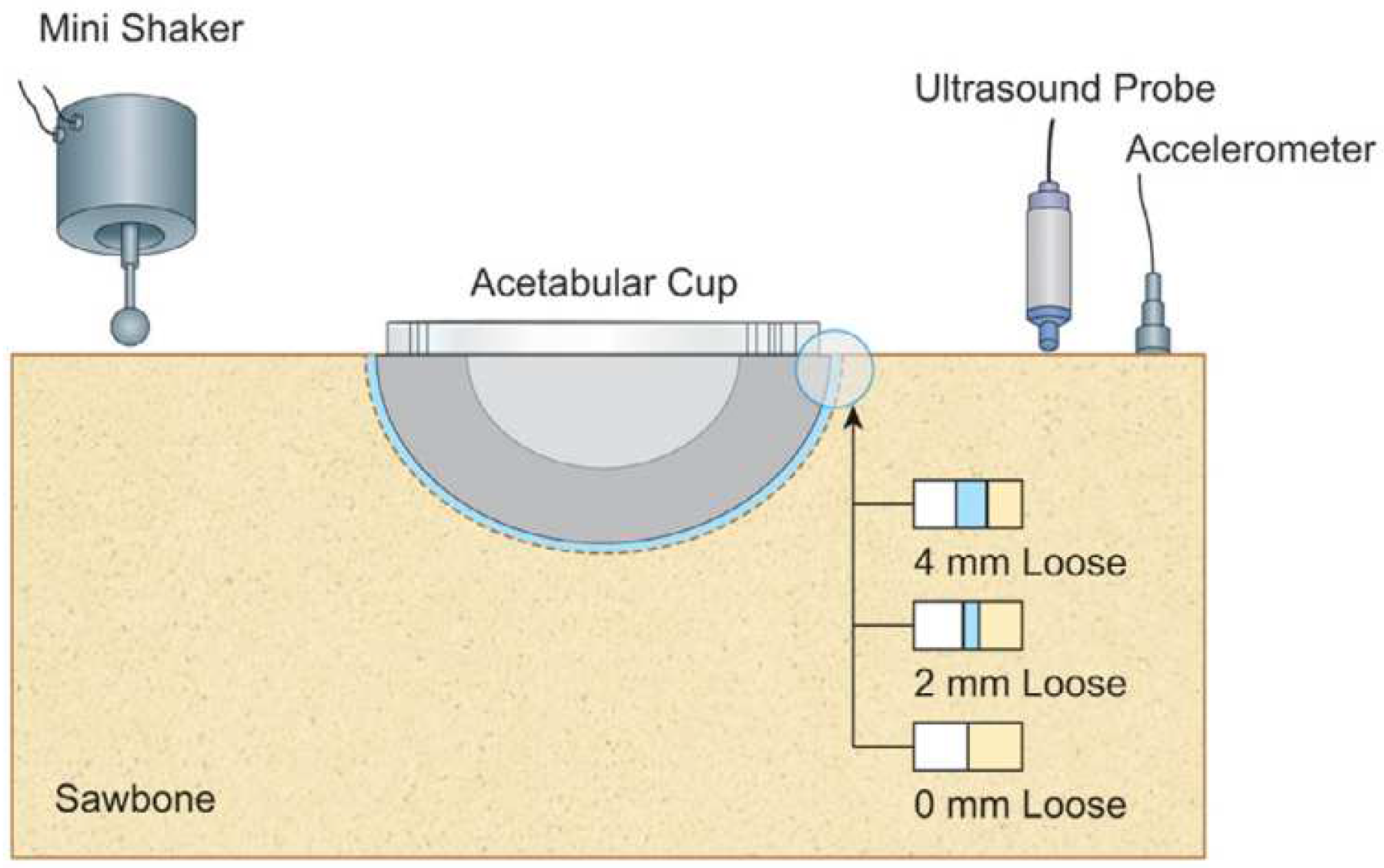
- Alshuhri et al. [33,34] also proposed a totally noninvasive technology to detect loosening of the acetabular component in total hip replacements. An extracorporeal shaker, in the femoral lateral condyle, and two extracorporeal accelerometers, in the iliac crest and greater trochanter, are required to monitor acetabular cup loosening, which is analyzed by computing the harmonic ratios (relative magnitude of the first harmonic to the fundamental frequency) in the output signal. The mechanical excitation is delivered in the 100 to 1500 Hz range and acetabular loosening is detected if any harmonic ratio is observed. Different fixation scenarios can be identified (authors analyzed two loosening states), as they are correlated to different harmonic ratios. The loosening is distinguished in a large frequency range (up to 1000 Hz) and harmonics can be more than 100 Hz apart from the fundamental frequency. This technology is illustrated in Figure 2.
- (T1-L3)
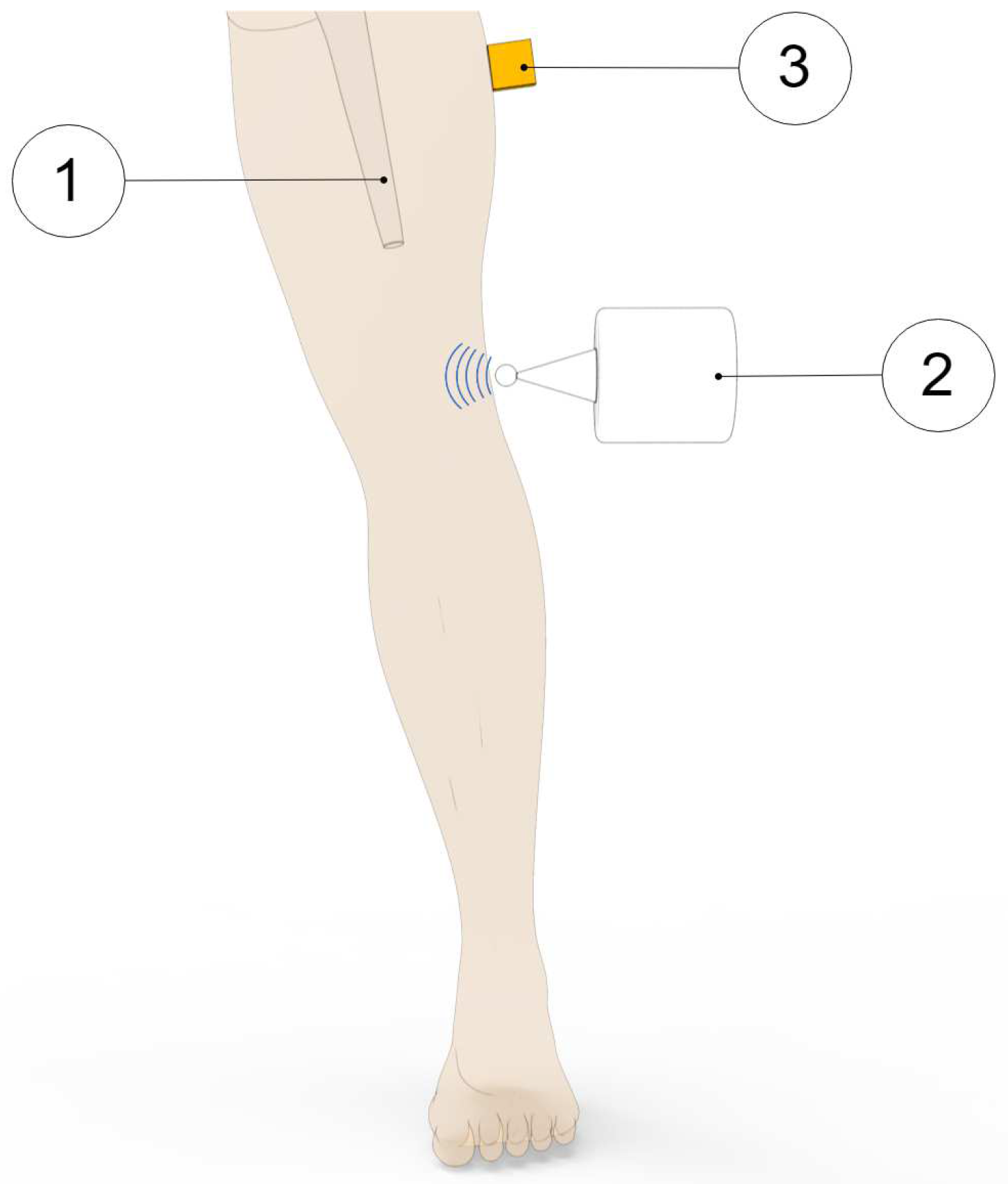
- Rieger et al. [35] proposed a technology to detect failed implant integration of total hip replacements (femoral stem and acetabular cup) by delivering mechanical excitation on the knee, by an extracorporeal shaker (100–2000 Hz), and subsequent identification of shifts in the resulting resonance frequency of the output vibrations measured by three accelerometers (medial condyle, greater trochanter, and iliac crest) extracorporeally localized (illustrated in Figure 3 with only one accelerometer). Failures are detectable at frequencies below 1000 Hz, but the frequency shifts are in the 2 to 111 Hz range, even though the larger the resonance frequency the larger the frequency shifts. The measures in the ilium only provided frequency shifts (3–22 Hz) for excitations of ~200 Hz. This technology only reports two integrations states (secure or loose), although it allows to differentiate states of stem–cup combinations.
- (T1-L4)
- The research team of Rieger et al. [36] also developed an alternative technology to detect loosening of hip endoprostheses. The mechanical excitation is extracorporeally provided by an array of piezoelectric actuators arranged on a spherical cap to drive shock waves (characterized by an approximation to a Dirac delta function: short rise time, high amplitude, and short pulse width around few μs). The mechanical pulses are delivered from the lateral knee condyle, the greater trochanter, and the iliac crest. These are the same locations where three accelerometers were extracorporeally allocated to allow analyses to shifts in the resonance frequency. This technology allowed to determine significant shifts in the 4 to 847 Hz range (most of them higher than 100 Hz) between 386 Hz and 847 Hz, and can be used to distinguish different states of stem–cup combinations, but only differentiate secure or loose integration levels.
- (T1-L5)
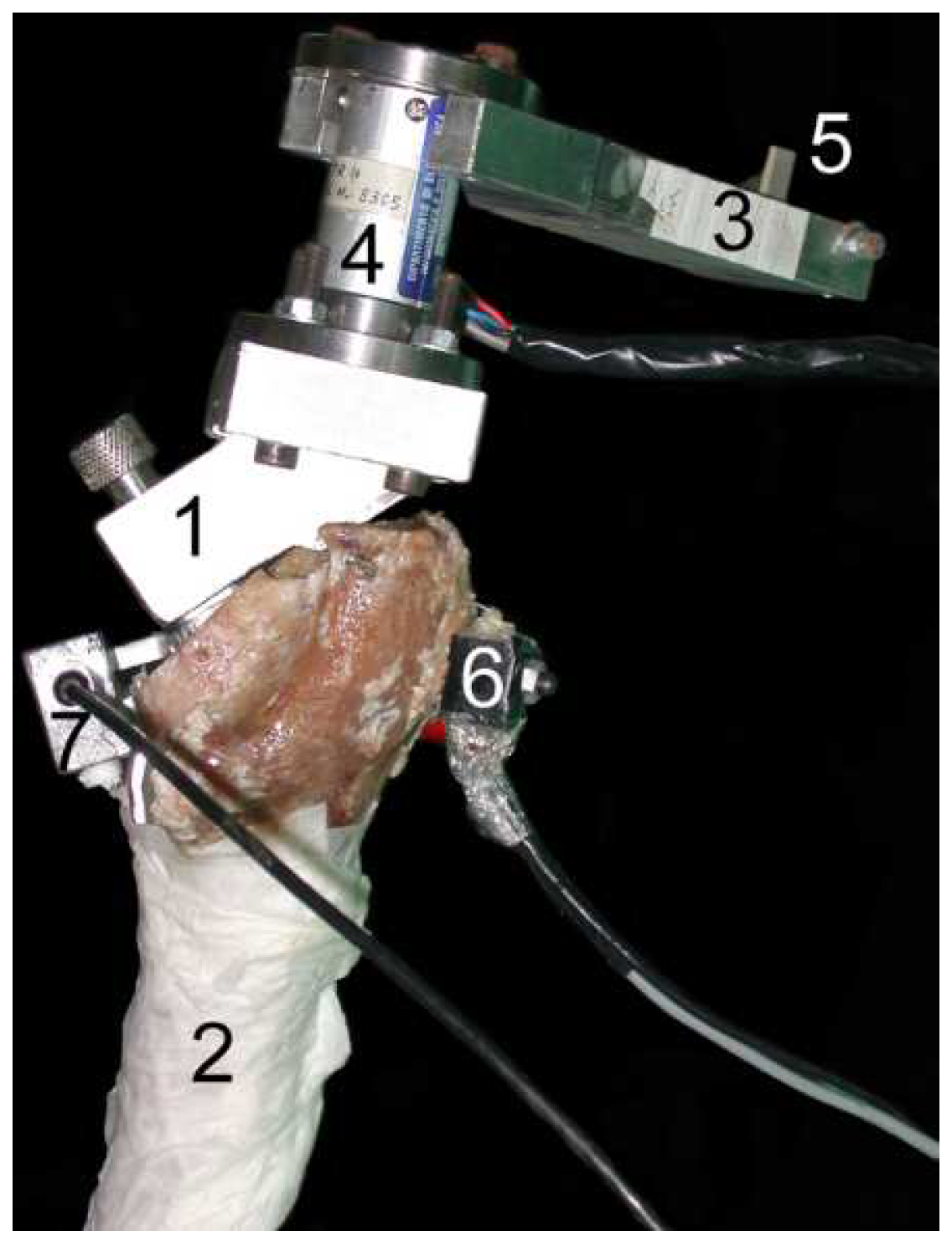
- Lannocca et al. [37] and Varini et al. [38] engineered a medical device customized to measure stability intraoperatively. It is attached to the implant system and comprises an extracorporeal piezoelectric system (piezoelectric cantilever vibrator based on a ceramic multilayer bender) to provide excitations in the 1200 to 2000 Hz range. An extracorporeal accelerometer located on the greater trochanter is also required to analyze the primary stability, performed by monitoring shifts in the resonance frequency. The identified threshold for differentiating between stable and quasi-stable implants is a frequency shift of 5 Hz. Different shifts provide data concerning different primary stabilities. The technology of Varini et al. is represented in Figure 4.
- (T1-L6)
- Lannocca et al. [37] and Varini et al. [38], using the same medical device to deliver the mechanical excitation, proposed to include a displacement transducer (LVDT) to track the primary stability by measuring implant–bone micromotions. Micromotions higher than 150 μm are an intraoperative indication of implant instability. Different micromotions are used to distinguish different primary stabilities.
- (T1-L7)
- Pastrav et al. [39] also contributed towards the perioperative monitoring of fixation of total hip endoprostheses. A shaker and a mechanical impedance head are attached to the prosthetic neck. They found frequency response patterns shifted to the right, and sustained increases as a function of the stiffness increase between successive insertion stages.
- (T1-L8)
- Jiang, Lee, and Yuan [40] tested a noninvasive technology to distinguish between failed (by wear and malalignment) and normal total knee replacements. An isokinetic dynamometer is used to impose extracorporeally excitations based on knee flexion–extension motions (up to 67°/s), as well as an accelerometer positioned on the skin covering the patella. Early and late stages of failure can be identified by analyzing the spectral power ratios of dominant poles of a transfer function representing the vibration signals. The physiological patellofemoral crepitus signals are also able to detect wear of knee components. A threshold, using the average spectral power ratio of dominant poles, was found to identify implant failures. Besides, interface failures are detected by spectral power ratio decreases for frequencies lower than 100 Hz.
- (T2-L1)
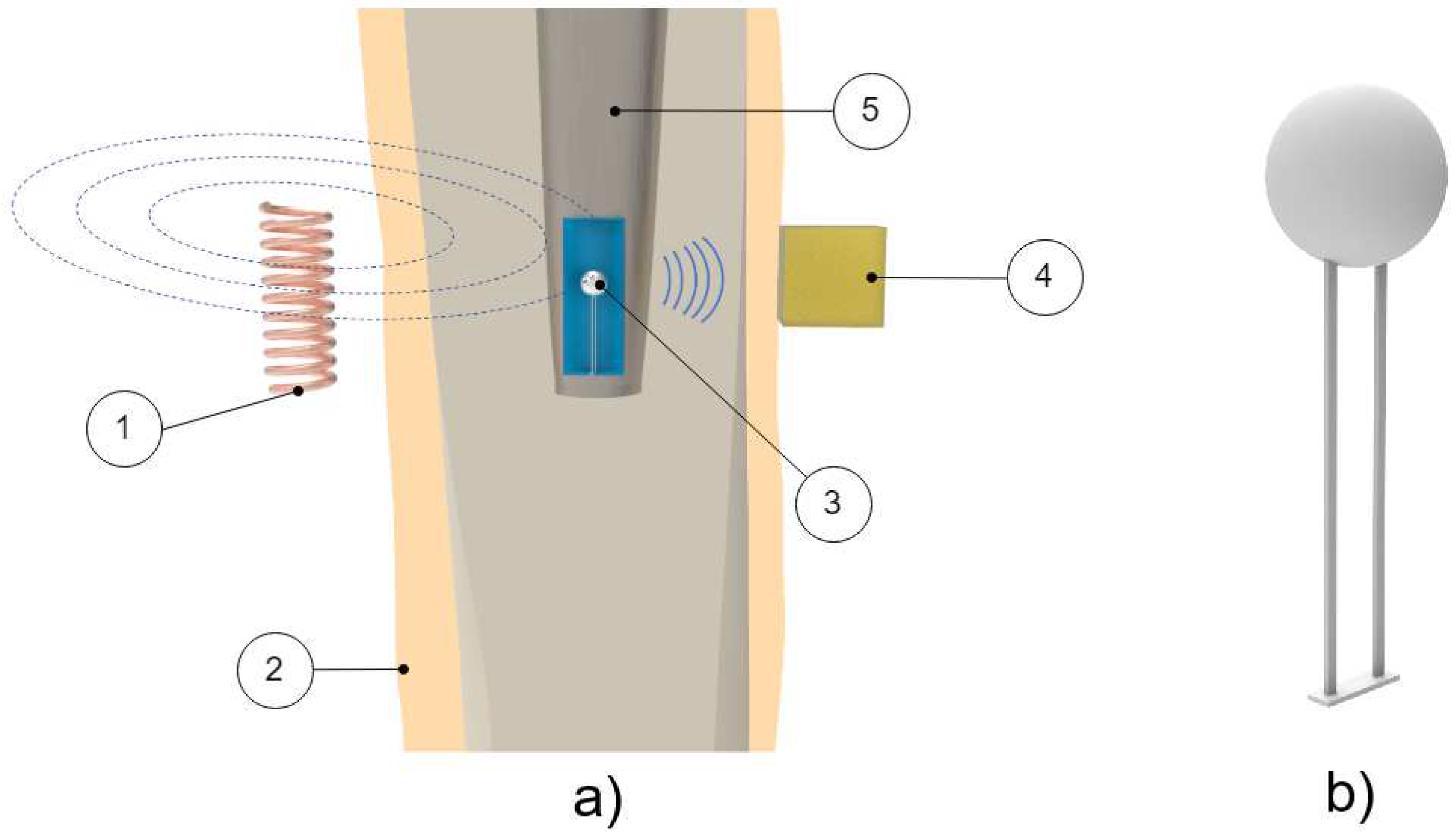
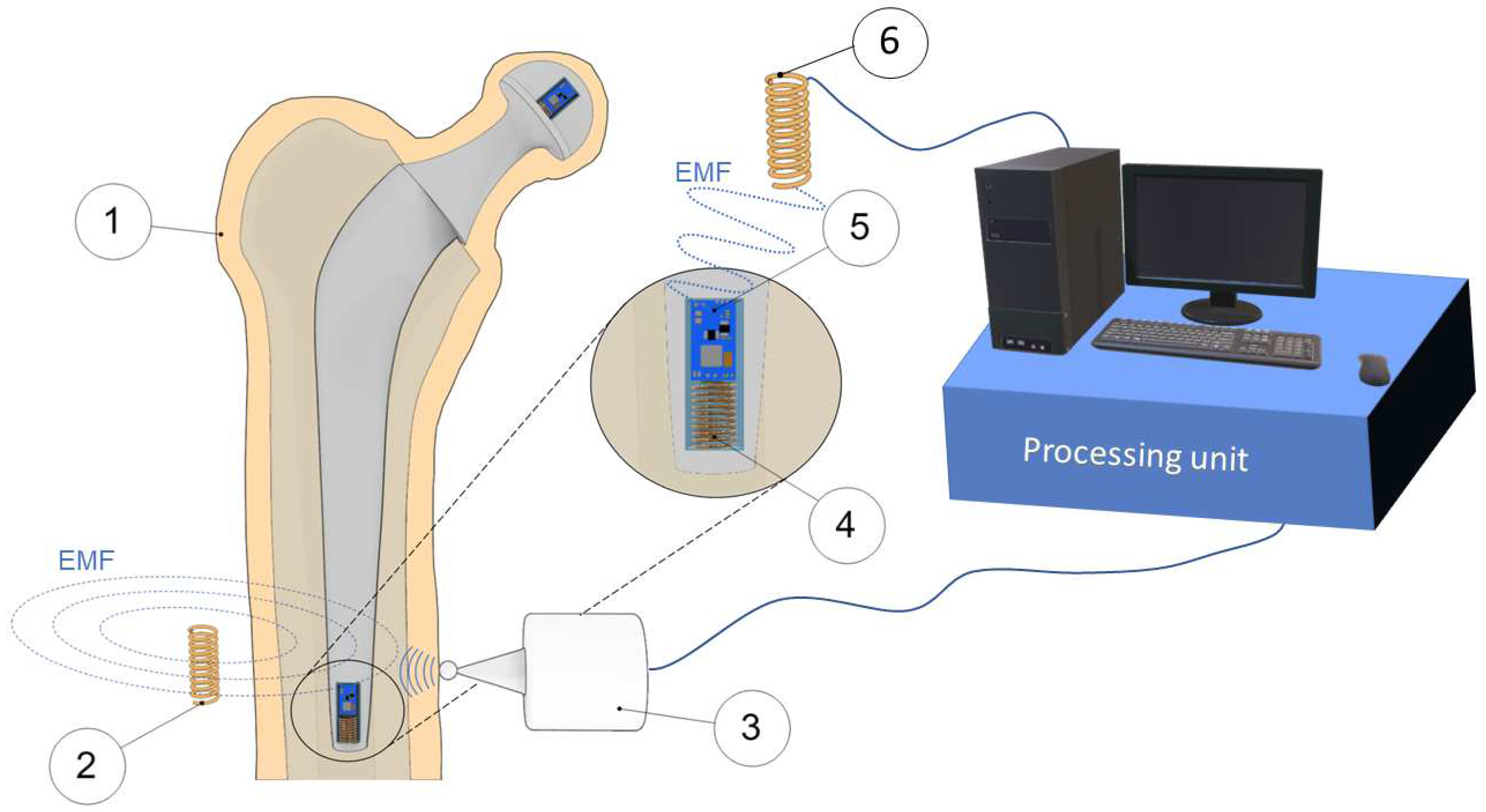
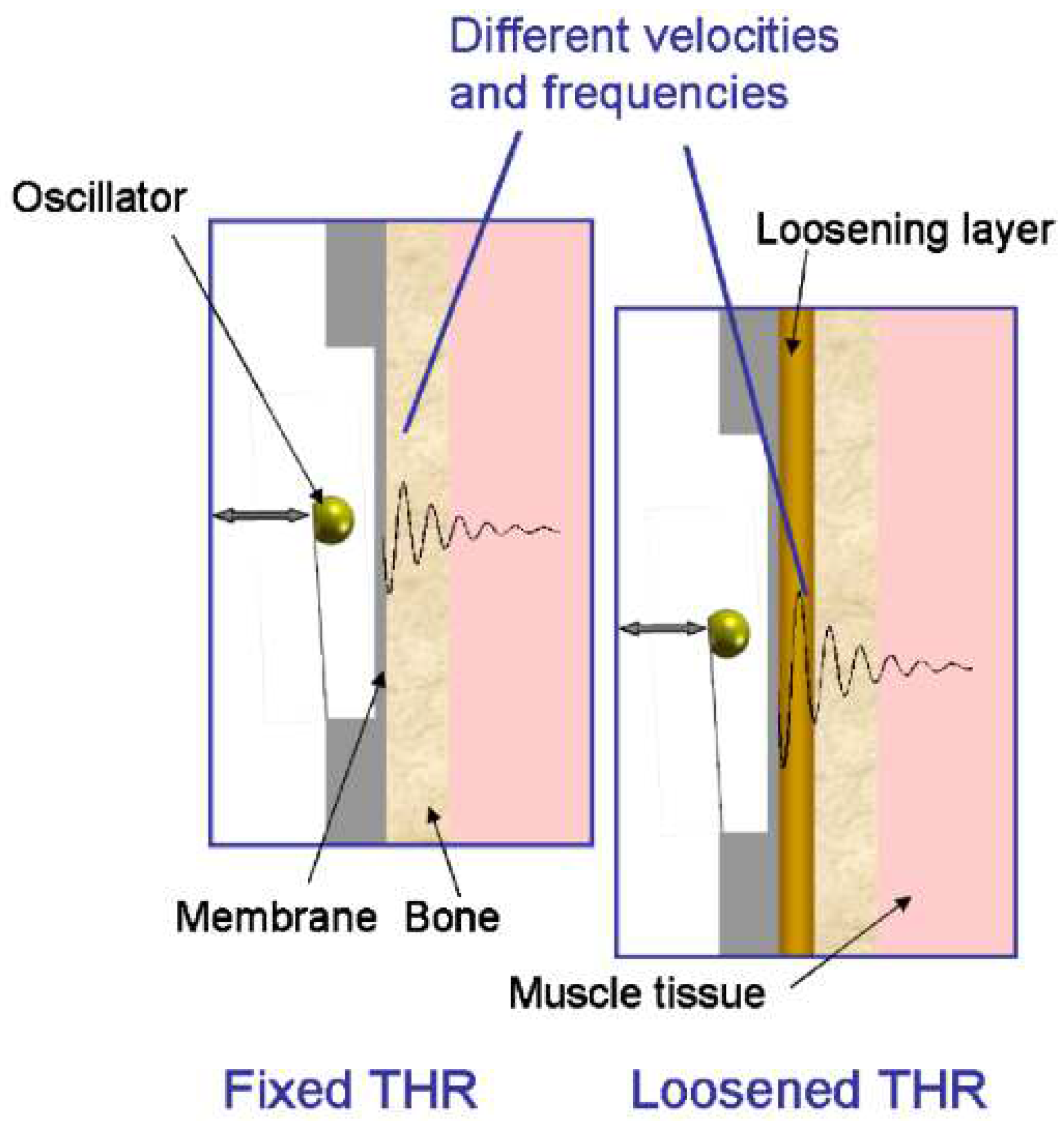
- Ruther et al. [41,42] provided an innovative technology based on intracorporeal mechanical excitation driven by extracorporeal magnetic induction and extracorporeal acceleration sensing (depicted in Figure 5). They developed an oscillator–implant system in which one or more magnetic spherical oscillators, attached to a flat spring, are embedded into the implant near the stem walls for detection of loosening features in several endoprosthetic devices (including total hip and knee replacements). The vibrational excitation is inductively provided by a coil extracorporeally, producing a magnetic field that imposes collisions of the oscillators with the implant walls, which causes the propagation of vibrations along the adjacent tissues surrounding the implant that can be measured by an accelerometer externally located at the skin surface. The measurement of the resulting accelerations signals and subsequent computation of the frequency shift in the output signal, as well as the central frequency in the resultant spectrum, allows prediction of the differing loosening locations and stages (press fit, slight loosening, and significant loosening). Shifted frequencies around 300 Hz and 400 Hz allow the detection of slight loosening and significant loosening, respectively, although better results were achieved using the central frequency as an indicator, as these frequencies always varied more than 1000 Hz for any loosed scenario under analyses. These authors also demonstrated an effective change in the central frequencies (exceeding 500 Hz) for different measurement locations, apart from a geometric reference in the range extended from the 5 to 124 mm range (distance in the three-dimensional space). Besides, they found longer transient periods for unstable fixations.
- (T3-L1)
- Glaser et al. [43] developed a noninvasive technology to monitor the performance of hip joint implants within the bone–implant interface. An intracorporeal excitation is delivered by the implant displacement during dynamic movements of patients. Mechanical vibration can be detected by placing two accelerometers: one at the greater trochanter and the other on the anterior superior iliac spine. The acetabulum–femur separation is identified by a high-frequency sound, which is originated by the impact caused when the femoral head slid back into the acetabular component.
3.1.2. Monitoring Methods and Technologies for Cemented Fixations
- (T1-C1)
- Li, Jones, and Gregg [46] developed a similar technology to T1-L1 (Georgiou and Cunningham [32]), but for cement–bone–implant interfaces. They used a shaker to deliver extracorporeal mechanical vibrations (100 to 1200 Hz) at the distal femur and monitored the output vibration by two extracorporeal accelerometers at the distal and proximal femur. The output signal was analyzed in the same frequency bandwidth as the extracorporeal excitation. Implant loosening was detected by distortion analyses of the output acceleration waveforms, as well as using the number of resonance frequencies (two or more). The authors tested three fixation states: secure, early loosening, and late loosening. Loose implants are characterized by highlighting more than two resonance frequencies and present a distorted output signal in several excitation frequencies. Contrarily, early implant loosening fixation states are not clearly distinguished from the secure state.
- (T1-C2)
- Similarly to Li, Jones, and Gregg [46], Rosenstein et al. [47] developed a method to assess the stability of cemented hip implants. They applied a mechanical excitation provided by an extracorporeal shaker (100 to 1000 Hz) at the lateral condyle while measuring the resulting output vibration, in the same bandwidth, with an extracorporeal accelerometer on the greater trochanter. The tests were only performed with fixed and loosened cemented implants (two loosening states). The loosening was correlated with harmonics in the output acceleration signals, although no specific frequency values were reported.
- (T1-C3)
- The research team of Rowlands, Duck, and Cunningham [48] also developed a method to monitor hip implant loosening. Using an extracorporeal shaker to provide input mechanical vibrations (100 to 1500 Hz) in the distal femur, they monitored response vibrations on the greater trochanter using an extracorporeal accelerometer. Although four fixations states were analyzed (a loosened state, as well as three fixed states), only the results regarding the loose implant were reported. Loosening is observed by analyzing the output signal resonance frequency. The most sensitive band for the driving frequency was found between 100 and 450 Hz. Apart from the loose implant results, no additional data was provided.
- (T1-C4)
- Leuridan et al. [49] developed a technology to assess the fixation state of tibial knee implants. Distinct tests were conducted by varying the measurement region (tibia surface and tibial plate) and using extracorporeal accelerometers to measure the output signals in the 50 to 4500 Hz frequency band. Mechanical excitation was provided by an impact hammer at the tibial plate surface. Four different cement–bone–implant interface scenarios were reported: secure, peripheral loosening, medial loosening, and lateral loosening. The authors used two criteria to process the resonance frequency results: the Modal Assurance Criterion and the Frequency Assurance Criterion; fixation states could be distinguished by the different values given by each criteria. The most sensitive band was found to be above 1500 Hz.
- (T1-C5)
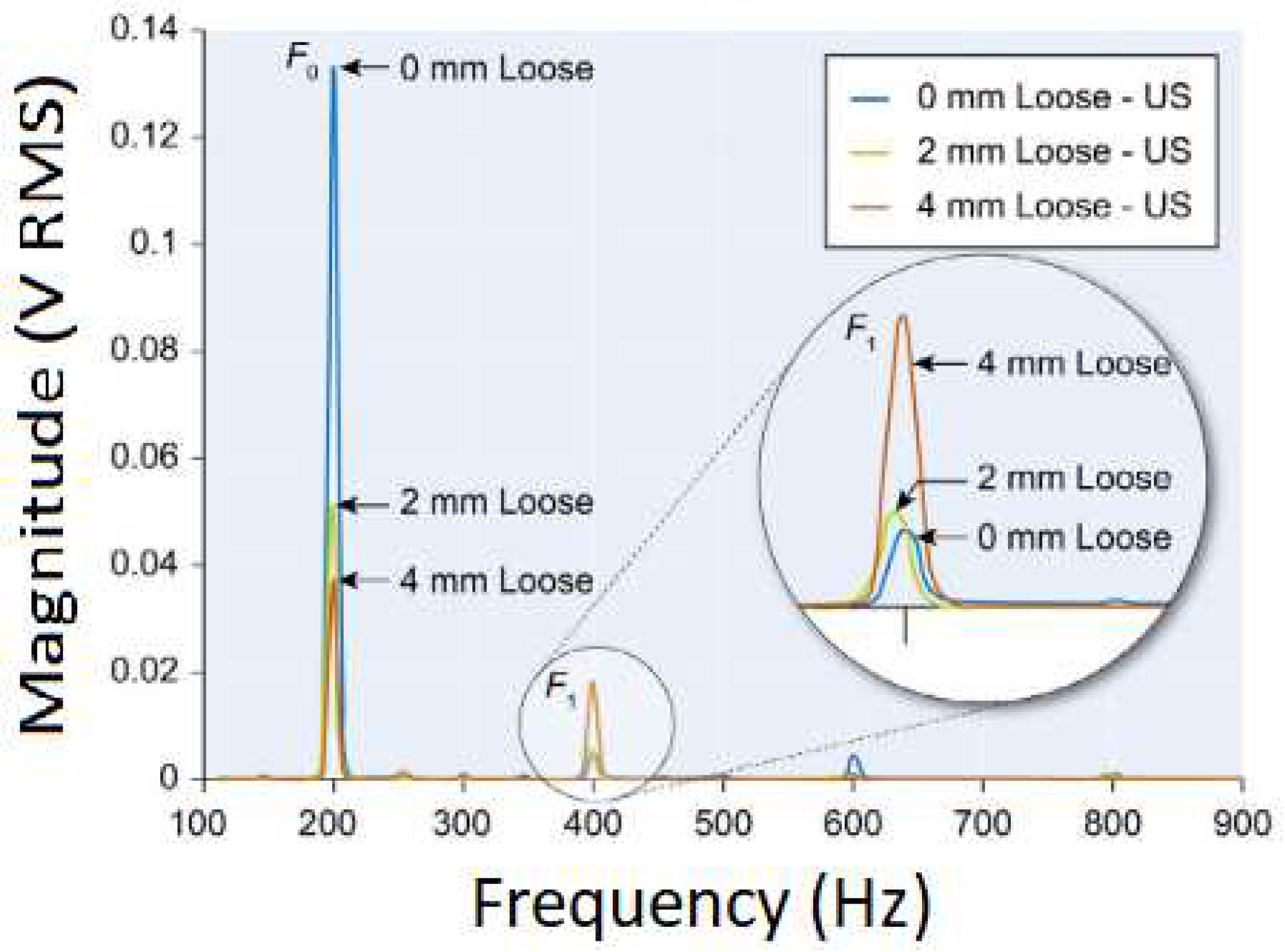
- Arami et al. [50] also provided a technology to detect loosening states of tibial knee implants. An extracorporeal shaker located below the patella (100 mm) was used to deliver mechanical excitations in the 30 to 3000 Hz frequency range. Three extracorporeal accelerometers were used: one was fixed in the vibrator tip, such that the output frequencies can be analyzed in the same range as the input, and the remaining two accelerometers were used to assess the vibration propagation to the tibial implant and were placed in the tibial plate. They assessed two interface states: well-fixed (cemented) and completely loose. Implant loosening is characterized with a new peak emerging in the 750 to 900 Hz range, when compared to a baseline result taken from the well-fixed case. Furthermore, peak shifts of 53.1 ± 13.7 Hz (in the 700 to 1200 Hz range) and 66.2 ± 9.0 Hz (in the 1200 to 2200 Hz range) can be observed. A graphical example of these two loosening indicators can be seen in Figure 6b).
- (T2-C1)
- Puers et al. [51] also designed an instrumented hip prosthesis but, differently, housing an acceleration sensor and some additional electronics in the implant head. The implant loosening detection is observed by analyzing the waveform distortion of the output acceleration signal (Figure 6a) when extracorporeal vibrations (100 to 200 Hz) are driven by a shaker placed on the distal end of the femoral bone. Loosened implants are detected by observational verification of non-similarity between the excitation signal and the measured acceleration outcome. Two interface states distinction were reported: secure or loose.
- (T2-C2)
- Marschner et al. [52] incorporated a two-axis accelerometer and supporting electronics inside an instrumented hip implant (distal end of stem) to measure shifts in the resonance frequency of the output vibrations when an extracorporeal shaker delivers a mechanical excitation (500 to 2500 Hz) on the distal femur condyle. This technology to detect loosening of total hip replacements also includes the ability to perform wireless monitoring and to be inductively powered. Two loosening states (proximally loose and proximally secure) can be distinguished in a band within the 1500 to 2500 Hz range. The shift threshold can exceed 300 Hz.
- (T2-C3)
- Sauer et al. [53] developed a similar technology to Marschner et al. [52] by incorporating a three-axis acceleration sensor in the implant head (and some additional electronics) and delivering extracorporeally mechanical excitations (500 to 2500 Hz), and, using a shaker placed at the central part of the femur, the implant loosening detection is observed by identifying shifts in the resonance frequency of accelerations measured inside the implant. Three loosening states were detected in the 500 to 1500 Hz range: maximum, medium, and minimum loosening. These states could be distinguished according to frequency shifts up to 100 Hz (approximately in the 20 to 100 Hz range).
3.1.3. Limitations of Vibrometric Monitoring Technologies
3.2. The Acoustic Approach to Monitor Implant Loosening States
3.2.1. Monitoring Methods and Technologies for Cementless Fixations
- (T1-L1)
- Unger et al. [55] developed a noninvasive technology to assess the hip implant stability. The extracorporeal excitation was provided by hand hitting the implant with a metallic device. The produced sound was monitored with an extracorporeal microphone attached to the lateral condyle. The implant loosening is distinguished by the response frequency: the resonance frequency increases as stability increases (authors observed increases from 400 to 800 Hz). Different fixation scenarios can also be identified by damping analyses: increasing dampened outputs were observed for increasing stabilities.
- (T1-L2)
- The research team of Alshuhri et al. [33,34] reported an alternative technology to the one previously described in the vibrometric approach to detect the acetabular component loosening for uncemented fixation, also depicted in Figure 2. The only difference concerns the use of an extracorporeal ultrasound probe instead of an accelerometer. Loosening is identified by analyzing harmonic ratios in the output signal. Different loosening scenarios (authors analyzed two loosening states) can be correlated to different harmonic ratios. The ultrasound measurements were performed in the 200 to 1500 Hz range, although the most sensitive excitation frequency was observed in the 200 to 950 Hz range. Note that the output signal presented higher harmonic ratios when compared to the monitoring data obtained using the accelerometer. The ultrasound results are shown in Figure 8.
- (T1-L3)
- Goossens et al. [56] engineered a custom-made technology to monitor the fixation states of the acetabular component of hip implants. The driving excitation input was provided by an extracorporeal hammer by hitting a metal rod connected to the simulated acetabular component. The acoustic outcomes were measured using an extracorporeal microphone, suspended above the experimental setup (approximately 20 cm) (Figure 9). The authors tested several fixation levels which could be distinguished by analyzing shifts in the output resonance frequency. The tests showed differences in the output frequency according to the different components (artificial and cadaveric pelvis) and the shifts were observed ranging from 9 to 248 Hz, which are bone model-dependent.
- (T2-L1)
- Glaser et al. [43,57] developed an alternative technology to analyze the output of the previous T3-L1 technology for uncemented fixations in the vibrometric approach. The difference concerns the analysis of the resulting sound emissions from the intracorporeal implant displacement, instead of the mechanical vibrations. Acoustic emissions were recorded with an extracorporeal sound transducer attached on the skin surface in the closest distance to the hip joint interface. High correlation was observed between the data obtained by the sound transducer and the accelerometers.
- (T3-L1)
- Ewald et al. [58,59] developed an innovative technology using a similar method to the one proposed by Ruther et al. (technology T2-L1 for uncemented fixations using the vibrometric approach). Similarly to Ruther et al. [58,59], they also incorporated spherical oscillators inside the implant, near the stem wall, attached to a flat spring, which are driven by magnetic induction excitations provided by extracorporeal coils (Figure 10). Unlike Ruther et al. [58,59], they used an extracorporeal microphone to record the resulting sound emission originated by collisions of the oscillators with the implant walls. The output sound emission was recorded on a wide frequency range, namely between 0 and 20 kHz. Different fixation scenarios can be detected (the authors identified up to four) by observing shifts in the output resonance frequency. The resonance frequency of the fixed and loose scenarios is up to 10 kHz apart.
3.2.2. Monitoring Methods and Technologies for Cemented Fixations
- (T1-C1)
- Rowlands, Duck, and Cunningham [48] engineered a technology similar to T1-C3 technology using the vibrometric approach. The only difference concerns the use of an extracorporeal ultrasound transducer to monitor acoustic signals in the proximal femur. Similar results to the ones provided using extracorporeal accelerometers were observed, although higher magnitude signals can be obtained. Same as before, they only provided results for the loose implant.
- (T1-C2)
- The technology developed by Unger et al. [55] for uncemented fixations (T1-L2) can also be applied in cemented fixations. The driving excitation is provided by hitting the femoral condyle with hammer strikes, and the extracorporeal microphone is attached to the hip. The implant stability is assessed by analyzing shifts in the resonance frequency. At least three distinct loosening scenarios are distinguished: secure, fissured (in the cement), and loose. The detection algorithm includes the analyses to harmonics and damping of the sound outcome, as resonance frequencies and damping increases for increasing stabilities. Different fixation scenarios can also be identified by observing resonance frequencies below 1000 Hz. An in vivo experiment showing the technology operation is illustrated in Figure 11a.
- (T1-C3)
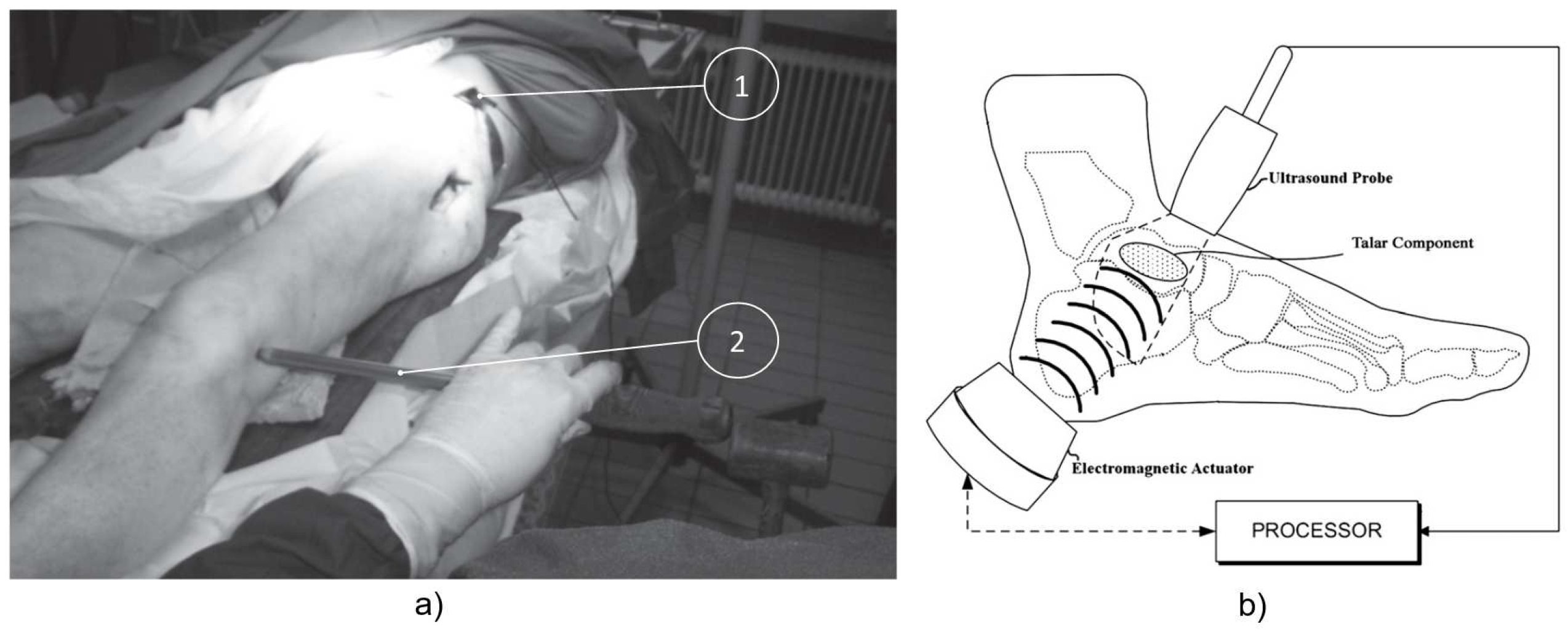
- Dahl et al. [60] developed a technology to quantify different levels of osteointegration of the talar component of total ankle prosthesis (Figure 11b). An extracorporeal actuator (ankle foot orthosis), located around the ankle, drives a mechanical excitation to impose motion to the talar component. The resulted vibration is detected by an ultrasound probe in the skin’s surface. Loose and fixed states are analyzed by computing the ratio of magnitudes of harmonics with the driving frequency: this ratio decreases as the fixations state is improved.
- (T2-C1)
- Davies, Tse, and Harris et al. [61] developed a monitoring technology to assess the cement–stem interface condition after hip arthroplasty. The analysis was focused on monitoring acoustic emissions generated by the cement–metal interface debonding or by cement cracks when the femur is physiologically loaded. An extracorporeal acoustic emission transducer attached to the femur’s mid-surface is required to monitor the acoustic emissions. Different interface stages can be observed by analyzing varying acoustic intensities and waveforms. However, this technology is not able to distinguish acoustic emissions between debonding of interfaces (without cement cracks) and cracks in the cement mantle.
- (T2-C2)
- Roques et al. [62] developed a technology to monitor the fatigue-related cement failures in the bone–cement interface. Two extracorporeal acoustic sensors, up to 70 mm away from each other on the top surface of the cemented device, were used to detect differing acoustic patterns due to crack propagation after static and dynamic loading. Progressive failure is distinguished by analyzing the energy and duration of the acoustic signal output: both increase with the fatigue crack growth. Interestingly, this technology is able to detect the crack location by analyzing the arrival time of the acoustic waves.
- (T2-C3)
- Qi et al. [63] developed a technology to assess cement failures in hip implants using eight extracorporeal acoustic emission sensors, attached along the medial–proximal femoral surface, and dynamically loading the femur. Crack locations can also be detected by measuring the arrival time of the acoustic waves. This monitoring system is able to distinguish the progress of crack formation based on the arrival times, number of events, signal energy, amplitude, and their location distribution. An in vitro test showing the experimental setup is depicted in Figure 12b).
- (T2-C4)
- Gueiral and Nogueira [64] designed a similar monitoring system to Qi et al. [63] (T2-C3) to monitor cement deterioration, but only used three acoustic transducers arranged in a cylindrical disposition at the femur surface. Acoustic events were characterized by their energy, amplitude, and arrival time. Their location can be predicted as well. The authors used the following parameters to characterize the acoustic emissions; amplitude, duration, and number of threshold crossings, although no concrete values were given.
- (T2-C5)
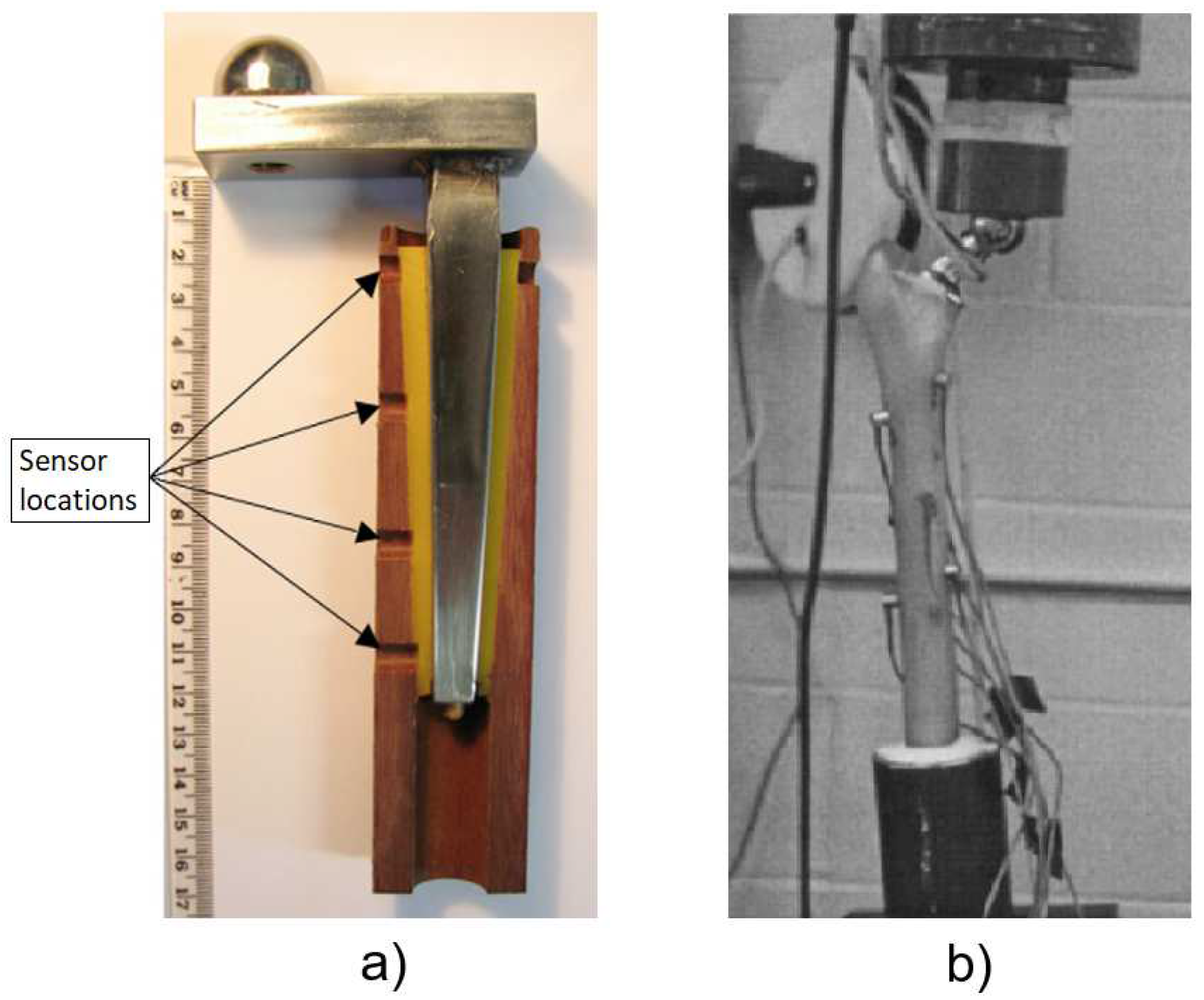
- Mavrogordato et al. [65] also proposed a technology to monitor cement deterioration in hip implants but including the ability to operate with surrounding soft tissues. The excitation is provided by delivering dynamic loading to the hip stem. Four acoustic sensors are externally mounted on the cement mantle along the stem length. The chosen criteria to find relevant acoustic events was based on the energy and rise time of the output signal. This technology is also able to predict the crack location by measuring the arrival time across different sensors. Components and materials used by the authors in the in vitro test can be seen in Figure 12a.
- (T3-C1)
- Mavrogordato et al. [65] also engineered a technology using intracorporeal acoustic sensors to monitor the cement–implant interface of hip implants. This method is similar to the previous T2-C5, but the sensors are embedded within the implant stem. The results regarding the intracorporeal sensors showed higher sensitivity in detecting acoustic events when compared to the extracorporeal sensors, as well as minor influence from ambient noise.
- (T4-C1)
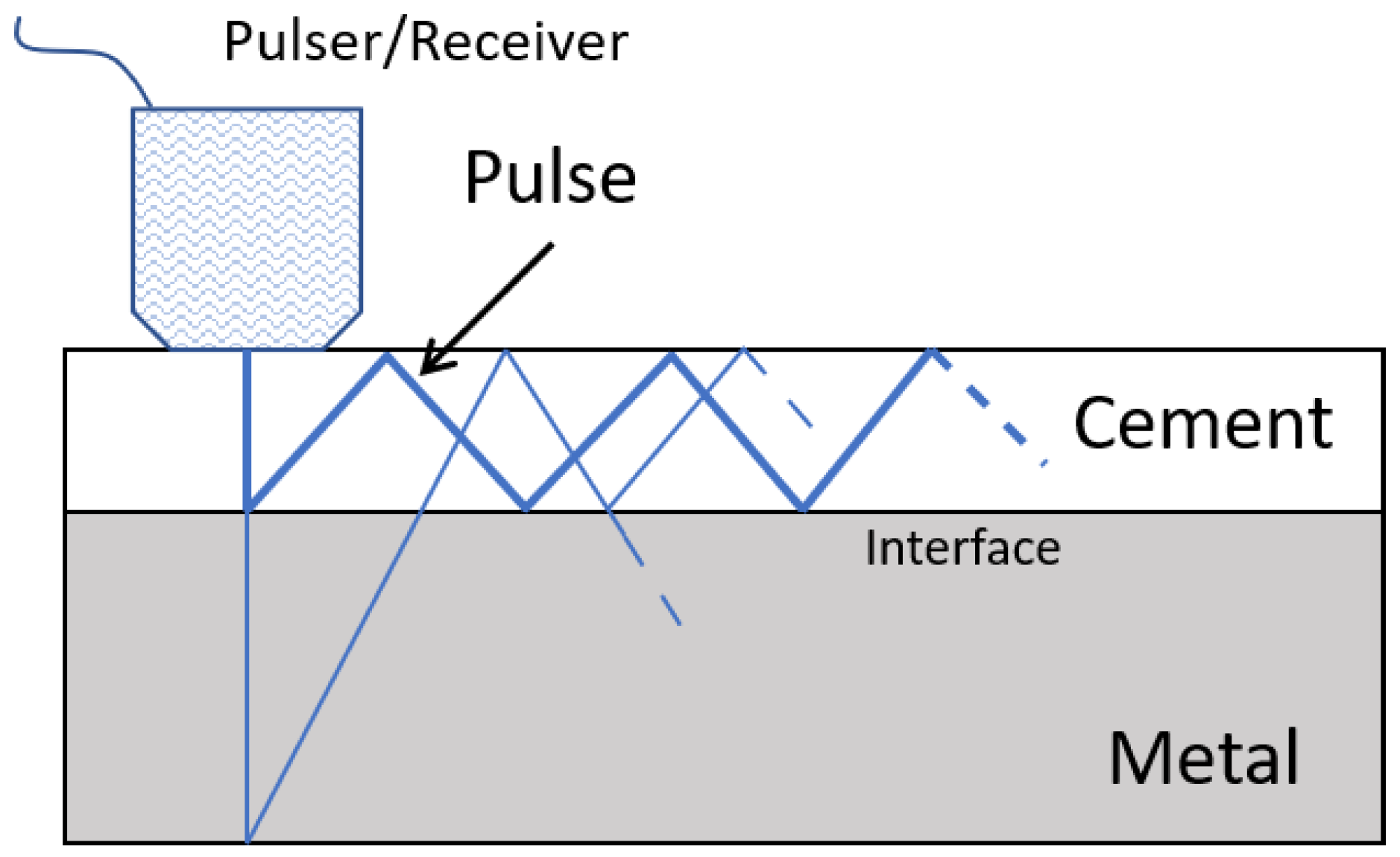
- Davies, Tse, and Harris [66] developed an active acoustic emission technology to assess the cement–implant interface state. The same extracorporeal device—an ultrasonic pulser/receiver—is attached to the femur’s surface. The interface bonding state was identified by emitting an ultrasonic wave through the cement and implant and consequent analyzes to the reflected acoustic signal outcome, namely, the amplitude and arrival time. A bonded interface is characterized by detecting a secondary signal corresponding to the reflection of the wave in the metal surface. In contrast, with a debonded surface, only the primary signal can be observed. Only two interface states were distinguished: bonded and debonded. A scheme illustrating the principle behind the emitter/receiver and the wave reflection is displayed in Figure 13.
3.2.3. Limitations of Acoustic Monitoring Technologies
3.3. The Bioelectric Impedance Approach to Monitor Implant Loosening States
3.3.1. Monitoring Methods and Technologies for Cementless Fixations
- (T1-L1)
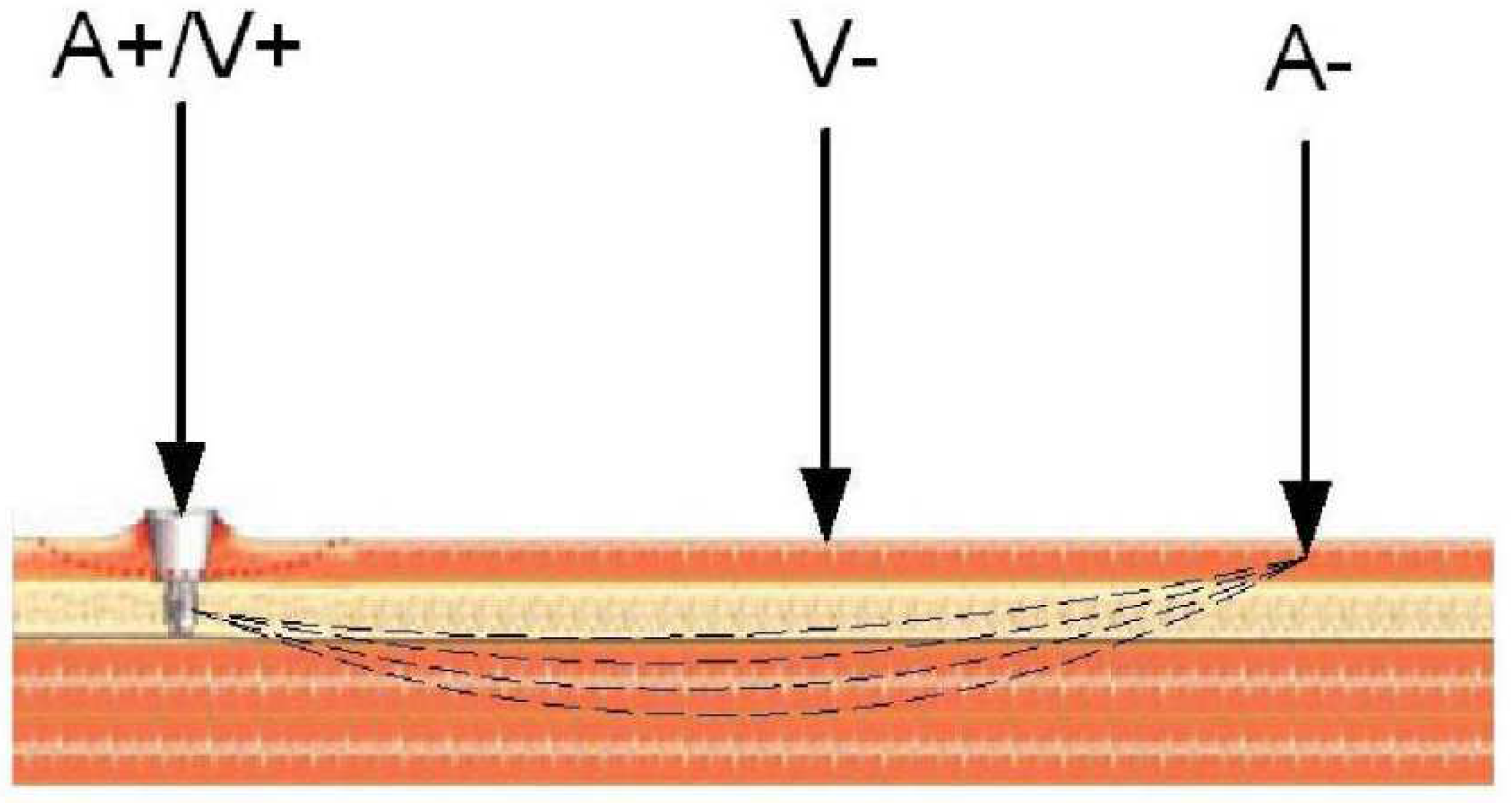
- Arpaia and Clemente et al. [69,70] used electrical impedance spectroscopy to assess bone–implant integration states. This technology requires two extracorporeal electrodes, which are used to deliver a variable current at the skin’s surface and measure the voltage drop between them (Figure 14). The resulting impedance is correlated to the interface state: the impedance increases for decreasing levels of integration. Furthermore, no information concerning the location of less stable regions is provided.
3.3.2. Limitations of Bioelectric Impedance Monitoring Technologies
3.4. The Magnetic Induction Approach to Monitor Implant Loosening States
3.4.1. Monitoring Methods and Technologies for Cementless Fixations
- (T1-L1)
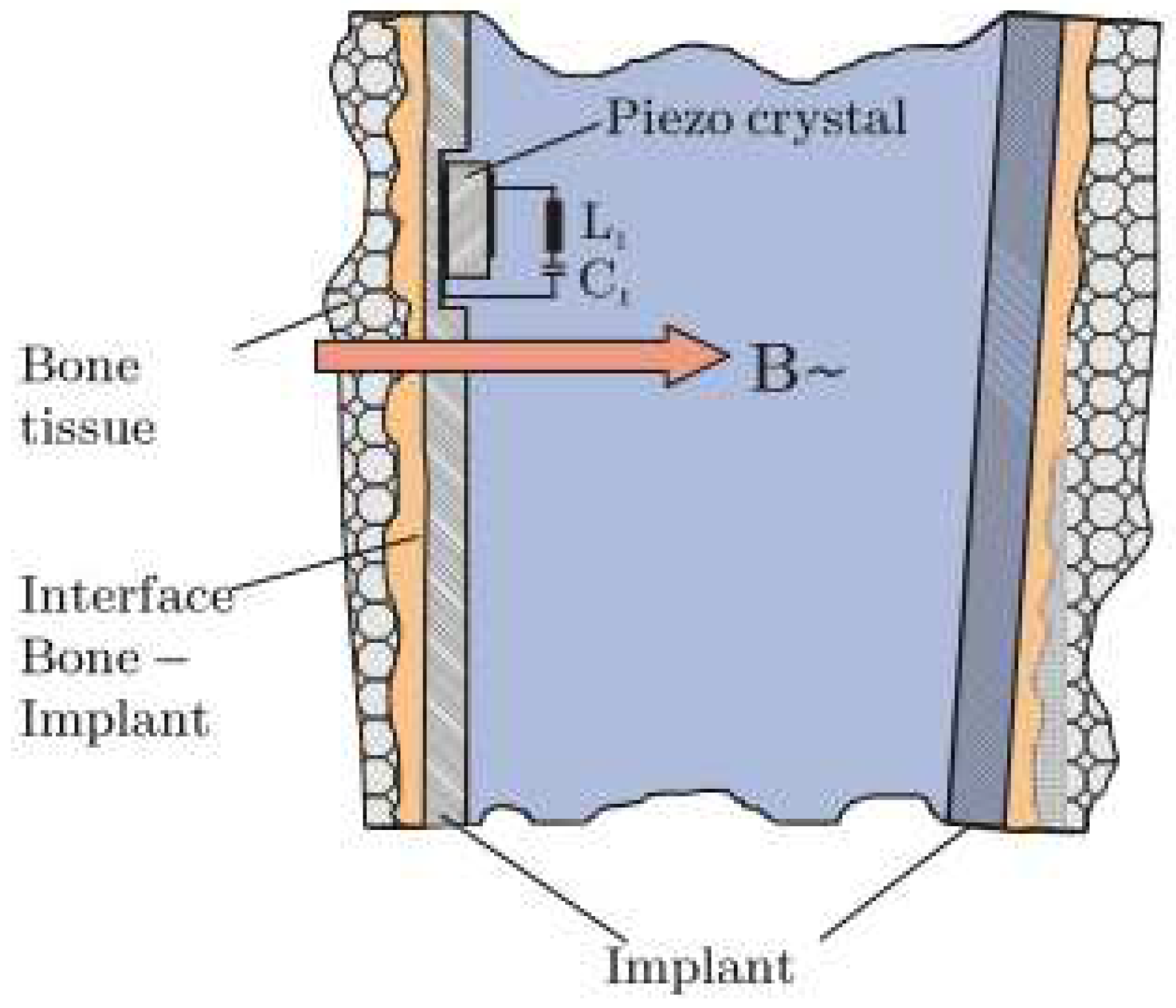
- Ewald et al. [58] developed a piezo-acoustic method to monitor implant loosening states. The technology comprises a piezo crystal (Figure 15) incorporated within the implant, which vibrates when it is driven by a magnetic field provided by an extracorporeal coil. According to the state of the bone–implant interface, the crystal’s vibration presents different dampening characteristics, which can be measured inductively, throughout an extracorporeal coil. Different interface states can be distinguished by analyzing the output signal amplitude for excitations with a constant frequency (the authors reported a frequency of 83 kHz).
- (T1-L2)
- With a similar technology to T2-L1 of the cementless vibrometric method, Ruther et al. [71] used a different approach to measure the output signal. The same oscillators are driven through magnetic induction provided by an extracorporeal coil, and, instead of reading a resulting mechanical vibration, an extracorporeal coil is used to measure the resultant oscillator velocity caused by the impact. By placing the oscillators in a magnetic field, their displacement induces a current in the extracorporeal coil, which is proportional to their velocity. Different loosening states can be distinguished by computing the oscillator’s velocity after impact.
3.4.2. Limitations of Magnetic Induction Monitoring Technologies
3.5. The Strain Approach to Monitor Implant Loosening States
3.5.1. Monitoring Methods and Technologies for Cementless Fixations
- (T1-L1)
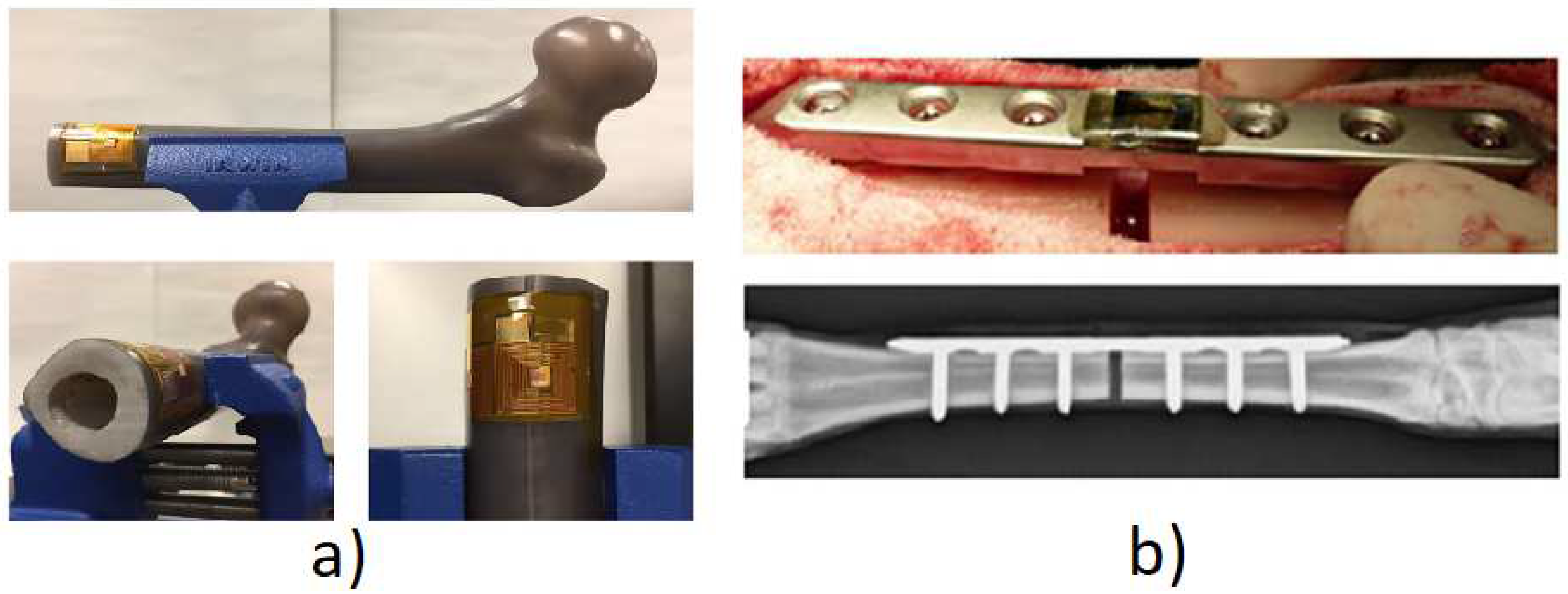
- Burton, Sun, and Lynch [72] developed a strain sensor to measure bone growth. The technology comprises two cosurface circuits: one for measuring the axial strain, and the other for the radial strain (Figure 16a). Each circuit was connected to a parallel-plate capacitor whose dielectric changes according to strain variations; the second is further connected to a titanium fuse which yields according to a set threshold of radial deformation. Powering and signal reading were achieved through extracorporeal magnetic induction. The changing capacitance values are assessed by monitoring shifts in the output resonance frequency: increasing strains shift the resonance frequency to lower values. This technology is meant to operate in contact with the bone tissue, wrapped around the bone structure.
- (T2-L1)
- McGilvray et al. [73] developed a biocompatible, microelectromechanical technology to track the fracture healing in implantable fixation plates (Figure 16b). It comprises intracorporeal planar capacitors and a resonance circuit incorporated in the implant to monitor variations in physical loading. Changes in the capacitance cause shifts in the resonance response frequency: a decrease in loading increases the resonance frequency. The technology is powered inductively through an extracorporeal antenna which also performs as the receiver of the sensor’s signal.
3.5.2. Limitations of Strain Monitoring Technologies
4. Discussion and Conclusions
- Operate noninvasively regarding peri-implant tissues.
- Allow integration inside implants.
- Allow stretchable and flexible integration inside implants.
- Allow their design with different topological structures and for different geometries of the bone–implant interface.
- Enable controllable and personalized monitoring of target regions on the tissues.
- Allow follow-up of the bone–implant interface state throughout the daily life of patients.
Funding
Conflicts of Interest
Appendix A. Technology Features Based on the Vibrometric Approach

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Refs. | Input | Output | Components and Location | Detection Aalgorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Georgiou and Cunningham [32] | Mechanical Vibration (<1 kHz) | Mechanical Vibration | Shaker: Knee; Accelerometer: Hip | Number of Harmonics and Amplitudes | Location: ND; States: Loose or Secure | — | 23 Patients | Limited to Laboratory |
| Alshuri et al. [33,34] | Mechanical Vibration (100–1500 Hz) | Mechanical Vibration | Shaker: Femoral Lateral Condyle; 2 Accelerometers: Iliac Crest and Greater Trochanter | Harmonic Ratios | Location: ND; States: Secure and 2 Loosening States | 3 Composite Hemi-Pelvis; a Sawbones Femur | — | Limited to Laboratory | |
| Rieger et al. [35] | Mechanical Vibration (100–2000 Hz) | Mechanical Vibration | Shaker: Knee; 3 Accelerometers: Medial Condyle, Greater Trochanter, Ilium’s Crest | Frequency Shifts | Location: ND; States: Loose or Secure | Sawbone Femur and Hip | — | Limited to Laboratory | |
| Rieger et al. [36] | Mechanical Shock Waves | Mechanical Vibration | Piezoelectric Atuators: Lateral Knee Condyle, Rreater Trochanter, Ilium Crest; 3 Accelerometers: Same Locations | Frequency Shifts | Location: ND; States: Loose or Secure | 3 Human Hip Specimens | — | Limited to Laboratory | |
| Lannocca et al. [37]; Varini et al. [38] | Mechanical Vibration (1.2–2 kHz) | Mechanical Vibration | Piezoelectric Actuator: Device; Accelerometer: Greater Trochanter | Frequency Shifts | Location: ND; States: Stable or Unstable | 5 Femurs b | — | Intra- Operatively | |
| Lannocca et al. [37]; Varini et al. [38] | Mechanical Vibration (1.2–2 kHz) | Mechanical Vibration | Piezoelectric Actuator: Device; LVDT: Greater Trochanter | Micro-Motions | Location: ND; States: Stable or Unstable | 9 Femurs b | — | Intra- Operatively | |
| Pastrav et al. [39] | Mechanical Vibration (<10 kHz) | Mechanical Vibration | Shaker: Prosthesis Neck; Mechanical Impedance Head: Prosthesis Neck | Frequency Shifts | Location: ND; States: Stable or Unstable | — | 30 Patients | Intra- Operatively | |
| Jiang, Lee and Yuan [40] | Flexion- Extension Motion | Mechanical Vibration | Isokinetic Dynamometer: Leg (tibia); Accelerometer: Patella; | Spectral Power Ratios | Location: ND; States: Loose or Secure | — | 14 Patients | Limited to Laboratory | |
| Method 2 | Ruther et al. [41,42] | Magnetic Induction (70 Hz) | Mechanical Vibration | Magnetic Oscilator: Inside the Implant (Porcine Ulna); Coil: 30 mm Apart of the Implant; Accelerometer: Porcine Foreleg | Frequency Shifts; Central Frequencies; Transient Periods | Location: ND; States: Secure and 2 Loosening States | 7 Prcine Foreleg | — | Limited to Laboratory |
| Method 3 | Glaser et al. [43] | Implat Motion | Mechanical Vibration | Two Accelerometers: Greater Trochanter and Iliac Spine | Output Signal High Frequency and Amplitude | Location: ND; States: Different Loosening States | — | 5 Patients | Limited to Laboratory |
| Refs. | Input | Output | Components and Location | Detection Algorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Li, Jones and Gregg [46] | Mechanical Vibration (100–1200 Hz) | Mechanical Vibration | Shaker: Distal Femur; Two Accelerometers: Distal and Proximal Femur | Frequency Shifts and Number of Harmonics | Location: ND; State: Secure or Loose | 54 Models b | — | Limited to Laboratory |
| Rosenstein et al. [47] | Mechanical Vibration (100–1000 Hz) | Mechanical Vibration | Shaker: Lateral Condyle; Accelerometer: Greater Trochanter | Number of Harmonics | Location: ND; State: Secure or Loose | 5 Femurs | 11 Patients c | Limited to Laboratory | |
| Rowlands, Duck and Cunningham [48] | Mechanical Vibration (100–1500 Hz) | Mechanical Vibration | Vibrator: Distal Femur; Accelerometer: Greater Trochanter | Harmonic Ratios | Location: ND; States: Secure or Loose | Sawbone Femur and Tufnol Tubing | — | Limited to Laboratory | |
| Leuridan et al. [49] | Mechanical Vibration | Mechanical Vibration | Impact Hammer: Tibial Plate; Accelerometers: Femur’s Surface and Tibial Plate | Frequency Response Function of the Output Signal | Location: ND; States: Secure and 3 Loosening Stages | 5 Artificial Femurs | — | Limited to Laboratory | |
| Arami et al. [50] | Mechanical Vibration (30–3000 Hz) | Mechanical Vibration | Accelerometer and Vibrator: 10 cm Below the Patella; Two Accelerometers: Fixed to the Tibial Plate | Appearance of a New Peak in the Output Signal d | Location: ND; State: Secure or Loose | 14 Lower Limbs Specimens and 14 Cadavers | — | Limited to Laboratory | |
| Method 2 | Puers et al. [51] | Mechanical Vibration (100–200 Hz) | Mechanical Vibration | Shaker: Distal Femur; Accelerometer: Implant’s Femoral Head | Non-Similarity Between the Input and Output Signal | Location: ND; State: Secure or Loose | 1 Cadaver | — | Limited to Laboratory |
| Marschner et al. [52] | Mechanical Vibration (500–2500 Hz) | Mechanical Vibration | Shaker: Distal Femur; 2 Accelerometers: Distal End of Stem | Shifts in the Output Resonance Frequency (≈300 Hz) | Location: ND; State: Proximally Loose and Proximally Secure | 1 Artificial Femur | — | Limited to Laboratory | |
| Sauer et al. [53] | Mechanical Vibration (500–2500 Hz) | Mechanical Vibration | Shaker: Central Femur; Accelerometer: Implant’s femoral Head | Shifts in the Output Resonance Frequency (20–100 Hz) | Location: ND; State: Three Loosening States | Artificial Femur | — | Limited to Laboratory |
Appendix B. Technology Features Based on the Acoustic Approach
| Refs. | Input | Output | Components and Location | Detection Algorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Alshuri et al. [33,34] | Mechanical Vibration (100–1500 Hz) | Acoustic Waves | Shaker: Femoral Lateral Condyle; Ultrasound Probe: Iliac Crest | Harmonic Ratios | Location: ND; States: Secure and 2 Loosening States | 3 Composite Hemi-Pelvis; a Sawbones Femur | — | Limited to Laboratory |
| Unger et al. [55] | Mechanical Vibration | Acoustic Waves | Metallic Object: Implant Surface; Microphone: Lateral Femoral Condyle | Shifts in the Output Frequency | Location: ND; States: Different Loosening Stages | 1 Cadaver | — | Limited to Laboratory | |
| Goosens et al. [56] | Mechanical Vibration | Acoustic Waves | Hammer; Microphone: 20 cm above the Experimental Setup | Shifts in the Output Frequency | Location: ND; States: Different Loosening Stages | Artificial Bone Block; Artificial Pelvis; and Cadaveric Pelvis | — | Limited to Laboratory | |
| Method 2 | Glaser et al. [43,57] | Implant’s Motion | Acoustic Waves | Acoustic Transducer: Hip’s Skin Surface | Output Signal High Frequency and Amplitude | Location: ND; States: Different Loosening Stages | — | 29 Patients b | Limited to Laboratory |
| Method 3 | Ewald et al. [58,59] | Magnetic Induction | Acoustic Waves | Extracorporeal Coil; Microphone; Oscillators: Stem Walls | Shifts in the Output Frequency | Location: ND; States: Secure and 3 Loosening Stages | Bench Top Test Simulating Different Tissues Layers | — | Limited to Laboratory |
| Refs. | Input | Output | Components and Location | Detection Algorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Rowlands, Duck and Cunningham [48] | Mechanical Vibration (100–1500 Hz) | Acoustic Waves | Vibrator: Distal Femur; Ultrasound Probe: Proximal Femur | Harmonic Ratios | Location: ND; States: Different Loosening Stages | Sawbone Femur and Tufnol Tubing | — | Limited to Laboratory |
| Unger et al. [55] | Mechanical Vibration | Acoustic Waves | Hammer: Femoral Condyle; Microphone: Hip | Shifts in the Resonance Frequency | Location: ND; States: Loose or Secure | 1 Cadaver | — | Limited to Laboratory | |
| Dahl et al. [60] | Mechanical Vibration | Acoustic Waves | Electromagnetic Actuator: Extracorporeal; Ultrasound Probe: Surface | Presence of Harmonics and Shifts in the Output Frequency | Location: ND; States: Loose or Secure | Cadaver Ankle | — | Limited to Laboratory | |
| Method 2 | Davies et al. [61] | Cement Degradation and Debonding | Acoustic Waves | Acoustic Emission Transducer: Femur’s Surface | Acoustic Emission Intensity and Output Signal Waveform | Location: ND; States: Several Loosening Stages | Artificial Femur (Fatigue Test—4 MPa at 2 Hz) | — | Limited to Laboratory |
| Roques et al. [62] | Cement Cracks | Acoustic Waves | Two Accelerometers: Material’s Surface | Acoustic Emissions Energy and Signal Duration | Location: Could Detect; States: Different Interface States | Cement Blocks Specimens (Fatigue and 4 Point Bending Tests) | — | Limited to Laboratory | |
| Qi et al. [63] | Cement Cracks | Acoustic Waves | Eight Acoustic Sensors: Femur’s Surface | Acoustic Events Characteristics | Location: Could Detect; States: Different Interface States | Sawbones Femur (Fatigue Test) | — | Limited to Laboratory | |
| Gueiral and Nogueira [64] | Cement Cracks | Acoustic Waves | Three Acoustic Sensors: Femur’s Surface | Bursts of Acoustic Emissions | Location: Could Detect; States: Different Interface States | Sawbones Femur (Fatigue Test) | — | Limited to Laboratory | |
| Mavrogordato et al. [65] | Cement Cracks | Acoustic Waves | Acoustic Sensors: Externally Placed | Output Signal’s High Energy and Short Rise Time | Location: Could Detect; States: Different Interface States | Tufnol Tubing | — | Limited to Laboratory | |
| Method 3 | Mavrogordato et al. [65] | Cement Cracks | Acoustic Waves | Acoustic Sensors: Embedded in the Stem | Output Signal’s High Energy and Short Rise Time | Location: Could Detect; States: Different Interface States | Tufnol Tubing | — | Limited to Laboratory |
| Method 4 | Davies, Tse and Harris [66] | Acoustic Emission | Acoustic Waves | Specimen Surface b | Amplitude and Time of Arrival of the Reflected Wave | Location: ND; States: Bonded or Debonded | Cement Slab, Artificial and Cadaver Femurs | — | Limited to Laboratory |
Appendix C. Technology Features Based on the Bioelectric Impedance Approach
| Refs. | Input | Output | Components and Location | Detection Algorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Arpaia et al. [69,70] | Voltage (Sinusoidal: 10–100 mV) | Biolectrical Impedance | Location: Skin Surface, Near the Implant | Variation of Impedance | Location: ND; Secure or Loose | Cow Long Bone | 3 Patients with Percutaneous Implants | Limited to Laboratory |
Appendix D. Technology Features Based on the Magnetic Induction Approach
| Refs. | Input | Output | Components and Location | Detection Algorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Ewald et al. [58] | Magnetic Induction | Magnetic Induction | Coil: Extracorporeally; Piezo-Crystal: Inside the Implant | Difference in the Output Signal Amplitude | Location: ND; States: Secure and Different States of Loosening | Artificial Bone | — | Limited to Laboratory |
| Ruther et al. [71] | Magnetic Induction | Magnetic Induction | Coils: Extracorporeally; Oscillators: Inside the Implant | Different Oscillator Velocity b | Location: ND; Secure and Different States of Loose | Test Bench Apparatus | — | Limited to Laboratory |
Appendix E. Technology Features Based on the Strain Approach
| Refs. | Input | Output | Components and Location | Detection Algorithm | Monitoring Ability | In Vitro Validation | In Vivo Validation | Periodicity | |
|---|---|---|---|---|---|---|---|---|---|
| Method 1 | Burton, Sun and Lynch [72] | Mechanical Load | Strain | Circuit: Wrapped Around the Bone Surface | Shifts in the Output Resonance Frequency | Location: ND; States: Several Deformation Stages (Axial and Radial) | Polyurethane Femur Model | — | Limited to Laboratory |
| Method 2 | McGilvray et al. [73] | Mechanical Load | Strain | Fixation Plate: Along the Femur; Sensor: Center of the Fixation Plate | Shifts in the Output Resonance Frequency | Location: ND; States: Secure and Different Loosening Stages | Ovine Osteotomy | 14 Sheep (Ovine) | Limited to Laboratory |
References
- Pivec, R.; Johnson, A.J.; Mears, S.C.; Mont, M.A. Hip arthroplasty. Lancet 2012, 380, 1768–1777. [Google Scholar] [CrossRef]
- Carr, A.J.; Robertsson, O.; Graves, S.; Price, A.J.; Arden, N.K.; Judge, A.; Beard, D.J. Knee replacement. Lancet 2012, 379, 1331–1340. [Google Scholar] [CrossRef]
- Viceconti, M.; Affatato, S.; Baleani, M.; Bordini, B.; Cristofolini, L.; Taddei, F. Pre-clinical validation of joint prostheses: A systematic approach. J. Mech. Behav. Biomed. Mater. 2009, 2, 120–127. [Google Scholar] [CrossRef] [PubMed]
- March, L.; Smith, E.U.; Hoy, D.G.; Cross, M.J.; Sanchez-Riera, L.; Blyth, F.; Buchbinder, R.; Vos, T.; Woolf, A.D. Burden of disability due to musculoskeletal (MSK) disorders. Best Pract. Res. Clin. Rheumatol. 2014, 28, 353–366. [Google Scholar] [CrossRef]
- Labek, G.; Thaler, M.; Janda, W.; Agreiter, M.; Stöckl, B. Revision rates after total joint replacement - cumulative results from worldwide joint register datasets. J. Bone Joint Surg. 2011, 93-B, 293–297. [Google Scholar] [CrossRef] [Green Version]
- McGrory, B.J.; Etkin, C.D.; Lewallen, D.G. Comparing contemporary revision burden among hip and knee joint replacement registries. Arthroplast. Today 2016, 2, 83–86. [Google Scholar] [CrossRef] [Green Version]
- Learmonth, I.; Young, C.; Rorabeck, C. The operation of the century: Total hip replacement. Lancet 2007, 370, 1508–1519. [Google Scholar] [CrossRef]
- Kunčická, L.; Kocich, R.; Lowe, T. Advances in metals and alloys for joint replacement. Prog. Mater Sci. 2017, 88, 232–280. [Google Scholar] [CrossRef]
- Raphel, J.; Holodniy, M.; Goodman, S.; Heilshorn, S. Multifunctional coatings to simultaneously promote osseointegration and prevent infection of orthopaedic implants. Biomaterials 2016, 84, 301–314. [Google Scholar] [CrossRef] [Green Version]
- Bagherifard, S. Mediating bone regeneration by means of drug eluting implants: From passive to smart strategies. Mater. Sci. Eng. C 2017, 71, 1241–1252. [Google Scholar] [CrossRef]
- Kurtz, S.; Ong, K.; Lau, E.; Mowat, F.; Halpern, M. Projections of primary and revision hip and knee arthroplasty in the United States from 2005 to 2030. J. Bone Joint Surg. 2007, 89, 780–785. [Google Scholar] [CrossRef] [PubMed]
- Norwegian National Advisory Unit on Arthroplasty and Hip Fractures; Report 2018; Technical Report; Helse Bergen HF, Department of Orthopaedic Surgery, Haukeland University Hospital: Bergen, Norway, 2018.
- Kurtz, S.M.; Lau, E.; Ong, K.; Zhao, K.; Kelly, M.; Bozic, K.J. Future young patient demand for primary and revision joint replacement—National projections from 2010 to 2030. Clin. Orthop. Relat. Res. 2009, 467, 2606–2612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kurtz, S.M.; Ong, K.L.; Lau, E.; Widmer, M.; Maravic, M.; Gómez-Barrena, E.; de Fátima de Pina, M.; Manno, V.; Torre, M.; Walter, W.L.; et al. International survey of primary and revision total knee replacement. Int. Orthop. 2011, 35, 1783–1789. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pabinger, C.; Geissler, A. Utilization rates of hip arthroplasty in OECD countries. Osteoarthr. Cartil. 2014, 22, 734–741. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ong, K.L.; Lau, E.; Suggs, J.; Kurtz, S.M.; Manley, M.T. Risk of subsequent revision after primary and revision total joint arthroplasty. Clin. Orthop. Relat. Res. 2010, 468, 3070–3076. [Google Scholar] [CrossRef] [Green Version]
- Gromov, K.; Pedersen, A.B.; Overgaard, S.; Gebuhr, P.; Malchau, H.; Troelsen, A. Do rerevision rates differ after first-time revision of primary THA with a cemented and cementless femoral component? Clin. Orthop. Relat. Res. 2015, 473, 3391–3398. [Google Scholar] [CrossRef] [Green Version]
- Soares dos Santos, M.P.; Marote, A.; Santos, T.; Torrão, J.; Ramos, A.; Simões, J.A.O.; da Cruz e Silva, O.A.B.; Furlani, E.P.; Vieira, S.I.; Ferreira, J.A.F. New cosurface capacitive stimulators for the development of active osseointegrative implantable devices. Sci. Rep. 2016, 6, 1–15. [Google Scholar] [CrossRef]
- Troelsen, A.; Malchau, E.; Sillesen, N.; Malchau, H. A review of current fixation use and registry outcomes in total hip arthroplasty: The uncemented paradox. Clin. Orthop. Relat. Res. 2013, 471, 2052–2059. [Google Scholar] [CrossRef] [Green Version]
- Sumner, D.R. Long-term implant fixation and stress-shielding in total hip replacement. J. Biomech. 2015, 48, 797–800. [Google Scholar] [CrossRef]
- Soares dos Santos, M.P.; Ferreira, J.A.F.; Ramos, A.; Simões, J.A.O.; Morais, R.; Silva, N.M.; Santos, P.M.; Reis, M.C.; Oliveira, T. Instrumented hip joint replacements, femoral replacements and femoral fracture stabilizers. Expert Rev. Med. Devices 2014, 11, 617–635. [Google Scholar] [CrossRef]
- Goriainov, V.; Cook, R.; Latham, J.M.; Dunlop, D.G.; Oreffo, R.O. Bone and metal: An orthopaedic perspective on osseointegration of metals. Acta Biomater. 2014, 10, 4043–4057. [Google Scholar] [CrossRef] [PubMed]
- Omar, O.M.; Lenneras, M.E.; Suska, F.; Emanuelsson, L.; Hall, J.M.; Palmquist, A.; Thomsen, P. The correlation between gene expression of proinflammatory markers and bone formation during osseointegration with titanium implants. Biomaterials 2011, 32, 374–386. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.Y.; Naito, H.; Matsumoto, T.; Tanaka, M. Estimation of change of bone structures after total hip replacement using bone remodeling simulation. Clin. Biomech. 2013, 28, 514–518. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; An, Y.; Li, F.; Li, D.; Jing, D.; Guo, T.; Luo, E.; Ma, C. The effects of pulsed electromagnetic field on the functions of osteoblasts on implant surfaces with different topographies. Acta Biomater. 2014, 10, 975–985. [Google Scholar] [CrossRef]
- Mj, P.; Ks, G. Arthroplasties (with and without bone cement) for proximal femoral fractures in adults. Cochrane Collab. 2010. [Google Scholar]
- Mäkelä, K.T.; Matilainen, M.; Pulkkinen, P.; Fenstad, A.M.; Havelin, L.; Engesaeter, L.; Furnes, O.; Pedersen, A.B.; Overgaard, S.; Kärrholm, J. Failure rate of cemented and uncemented total hip replacements: Register study of combined Nordic database of four nations. Br. Med. J. 2014. [Google Scholar] [CrossRef] [Green Version]
- Ruther, C.; Timm, U.; Ewald, H.; Mittelmeier, W.; Bader, R.; Schmelter, R.; Lohrengel, A.; Kluess, D. Current Possibilities for Detection of Loosening of Total Hip Replacements and How Intelligent Implants Could Improve Diagnostic Accuracy. In Recent Advances in Arthroplasty; IntechOpen: Rijeka, Croatia, 2012; Chapter 17; pp. 363–386. [Google Scholar]
- Soares dos Santos, M.P.; Ferreira, J.A.F.; Ramos, A.; Simões, J.A.O. Active orthopaedic implants: Towards optimality. J. Frankl. Inst. 2015, 352, 813–834. [Google Scholar] [CrossRef]
- Soares dos Santos, M.P.; Coutinho, J.; Marote, A.; Sousa, B.; Ramos, A.; Ferreira, J.A.F.; Bernardo, R.; Rodrigues, A.; Marques, A.T.; da Cruz e Silva, O.A.B.; et al. Capacitive technologies for highly controlled and personalized electrical stimulation by implantable biomedical systems. Sci. Rep. 2019, 9, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Soares dos Santos, M.P.; Ferreira, J.A.F.; Ramos, A.; Simões, J.A.O.; Morais, R.; Silva, N.M.; Santos, P.M.; Reis, M.J.C.S.; Oliveira, T. Instrumented hip implants: Electric supply systems. J. Biomech. 2013, 46, 2561–2571. [Google Scholar] [CrossRef]
- Georgiou, A.P.; Cunningham, J.L. Accurate diagnosis of hip prosthesis loosening using a vibrational technique. Clin. Biomech. 2001, 16, 315–323. [Google Scholar] [CrossRef]
- Alshuhri, A.A.; Holsgrove, T.P.; Miles, A.W.; Cunningham, J.L. Development of a non-invasive diagnostic technique for acetabular component loosening in total hip replacements. Med. Eng. Phys. 2015, 37, 739–745. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alshuhri, A.A.; Holsgrove, T.P.; Miles, A.W.; Cunningham, J.L. Non-invasive vibrometry-based diagnostic detection of acetabular cup loosening in total hip replacement (THR). Med. Eng. Phys. 2017, 48, 188–195. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rieger, J.S.; Jaeger, S.; Schuld, C.; Kretzer, J.P.; Bitsch, R.G. A vibrational technique for diagnosing loosened total hip endoprostheses: An experimental sawbone study. Med. Eng. Phys. 2013, 35, 329–337. [Google Scholar] [CrossRef] [PubMed]
- Rieger, J.S.; Jaeger, S.; Kretzer, J.P.; Rupp, R.; Bitsch, R.G. Loosening detection of the femoral component of hip prostheses with extracorporeal shockwaves: A pilot study. Med. Eng. Phys. 2015, 37, 157–164. [Google Scholar] [CrossRef] [PubMed]
- Lannocca, M.; Varini, E.; Cappello, A.; Cristofolini, L.; Bialoblocka, E. Intra- operative evaluation of cementless hip implant stability: A prototype device based on vibration analysis. Med. Eng. Phys. 2007, 29, 886–894. [Google Scholar] [CrossRef] [PubMed]
- Varini, E.; Bialoblocka-Juszczyk, E.; Lannocca, M.; Cappello, A.; Cristofolini, L. Assessment of implant stability of cementless hip prostheses through the frequency response function of the stem–bone system. Sens. Actuators A 2010, 163, 526–532. [Google Scholar] [CrossRef]
- Pastrav, L.C.; Jaecques, S.V.N.; Jonkers, I.; der Perre1, G.V.; Mulier, M. In vivo evaluation of a vibration analysis technique for the per-operative monitoring of the fixation of hip prostheses. J. Orthop. Surg. Res. 2009, 4, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.C.; Lee, J.H.; Yuan, T.T. Vibration Arthrometry in the Patients with Failed Total Knee Replacement. IEEE Trans. Biomed. Eng. 2000, 47, 219–227. [Google Scholar] [CrossRef]
- Ruther, C.; Nierath, H.; Ewald, H.; Cunningham, J.L.; Mittelmeier, W.; Bader, R.; Kluess, D. Investigation of an acoustic-mechanical method to detect implant loosening. Med. Eng. Phys. 2013, 35, 1669–1675. [Google Scholar] [CrossRef]
- Ruther, C.; Timm, U.; Fritsche, A.; Ewald, H.; Mittelmeier, W.; Bader, R.; Kluess, D. A New Approach for Diagnostic Investigation of Total Hip Replacement Loosening. In Biomedical Engineering Systems and Technologies; Springer: Heidelberg, Germany, 2013; pp. 74–79. [Google Scholar]
- Glaser, D.; Komistek, R.D.; Cates, H.E.; Mahfouz, M.R. A non-invasive acoustic and vibration analysis technique for evaluation of hip joint conditions. J. Biomech. 2010, 43, 426–432. [Google Scholar] [CrossRef]
- Ruther, C.; Schulze, C.; Boehme, A.; Nierath, H.; Ewald, H.; Mittelmeier, W.; Bader, R.; Kluess, D. Investigation of a passive sensor array for diagnosis of loosening of endoprosthetic implants. Sensors 2013, 13, 1–20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qi, G.; Mouchon, W.P.; Tan, T.E. How much can a vibrational diagnostic tool reveal in total hip arthroplasty loosening? Clin. Biomech. 2003, 18, 444–458. [Google Scholar] [CrossRef]
- Li, P.L.S.; Jones, N.B.; Gregg, P.J. Vibration analysis in the detection of total hip prosthetic loosening. Med. Eng. Phys. 1996, 18, 596–600. [Google Scholar] [CrossRef]
- Rosenstein, A.D.; McCoy, G.F.; Bulstrode, C.J.; McLardy-Smith, P.D.; Cunningham, J.L.; Turner-Smith, A.R. The differentiation of loose and secure femoral implants in total hip replacement using a vibrational technique: An anatomical and pilot clinical study. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 1989, 203, 77–81. [Google Scholar] [CrossRef]
- Rowlands, A.; Duck, F.A.; Cunningham, J.L. Bone vibration measurement using ultrasound: Application to detection of hip prosthesis loosening. Med. Eng. Phys. 2008, 30, 278–284. [Google Scholar] [CrossRef]
- Leuridan, S.; Goossens, Q.; Sloten, T.V.; Landsheer, K.D.; Delport, H.; Pastrav, L.; Denis, K.; Desmet, W.; Sloten, J.V. Vibration-based fixation assessment of tibial knee implants: A combined in vitro and in silico feasibility study. Med. Eng. Phys. 2017, 49, 109–120. [Google Scholar] [CrossRef]
- Arami, A.; Delaloye, J.R.; Rouhani, H.; Jolles, B.M.; Aminian, K. Knee Implant Loosening Detection: A Vibration Analysis Investigation. Ann. Biomed. Eng. 2018, 46, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Puers, R.; Catrysse, M.; Vandevoorde, G.; Collier, R.J.; Louridas, E.; Burny, F.; Donkerwolcke, M.; Moulart, F. Telemetry system for the detection of hip prosthesis loosening by vibration analysis. Sens. Actuators A 2000, 85, 42–47. [Google Scholar] [CrossRef]
- Marschner, U.; Grätz, H.; Jettkant, B.; Ruwisch, D.; Woldt, G.; Fischer, W.J.; Clasbrummel, B. Integration of a wireless lock-in measurement of hip prosthesis vibrations for loosening detection. Sens. Actuators A 2009, 156, 145–154. [Google Scholar] [CrossRef]
- Sauer, S.; Marschner, U.; Gratz, H.; Fischer, W.J. Medical wireless vibration measurement system for hip prosthesis loosening detection. In Proceedings of the Third International Conference on Sensor Device Technologies and Applications Applications (SENSORDEVICES 2012), Rome, Italy, 19–24 August 2012; pp. 9–13. [Google Scholar]
- Pérez, M.; Seral-García, B. A finite element analysis of the vibration behaviour of a cementless hip system. Comput. Meth. Biomech. Biomed. Eng. 2011, 16, 1022–1031. [Google Scholar] [CrossRef]
- Unger, A.C.; Cabrera-Palacios, H.; Schulz, A.P.; Jürgens, C.; Paech, A. Acoustic monitoring (RFM) of total hip arthroplasty results of a cadaver study. Eur. J. Med. Res. 2009, 14, 264–271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Goossens, Q.; Leuridan, S.; Henyš, P.; Roosen, J.; Pastrav, L.; Mulier, M.; Desmet, W.; Denis, K.; Vander Sloten, J. Development of an acoustic measurement protocol to monitor acetabular implant fixation in cementless total hip Arthroplasty: A preliminary study. Med. Eng. Phys. 2017, 49, 28–38. [Google Scholar] [CrossRef] [PubMed]
- Glaser, D.; Komistek, R.D.; Cates, H.E.; Mahfouz, M.R. Clicking and squeaking: In vivo correlation of sound and separation for different bearing surfaces. J. Bone Joint Surg. Ser. A 2008, 90, 112–120. [Google Scholar] [CrossRef] [PubMed]
- Ewald, H.; Timm, U.; Bader, R.; Kluess, D. Acoustic sensor system for loosening detection of hip implants. In Proceedings of the 2011 Fifth International Conference on Sensing Technology, Palmerston North, The New Zealand, 28 November–1 December 2011; pp. 494–497. [Google Scholar]
- Ewald, H.; Ruther, C.; Mittelmeier, W.; Bader, R. A novel in vivo Sensor for Loosening Diagnostics in Total Hip Replacement. In Proceedings of the 2011 IEEE SENSORS, Limerick, Ireland, 28–31 October 2011; pp. 89–92. [Google Scholar]
- Reinhall, P.G.; Benirschke, S.K.; Dahl, M.C.; Ching, R.P.; Kramer, P.A.; Hansen, S.T. The efficacy of using vibrometry to detect osteointegration of the Agility total ankle. J. Biomech. 2010, 43, 1840–1843. [Google Scholar] [CrossRef]
- Davies, J.P.; Tse, M.K.; Harris, W.H. Monitoring the integrity of the cement-metal interface of total joint components in vitro using acoustic emission and ultrasound. J. Arthroplast. 1996, 11, 594–601. [Google Scholar] [CrossRef]
- Roques, A.; Browne, M.; Thompson, J.; Rowland, C.; Taylor, A. Investigation of fatigue crack growth in acrylic bone cement using the acoustic emission technique. Biomaterials 2004, 25, 769–778. [Google Scholar] [CrossRef]
- Qi, G.; Li, J.; Mann, K.A.; Mouchon, W.P.; Hamstad, M.A.; Salehi, A.; Whitten, S.A. 3D real time methodology monitoring cement failures in THA. J. Biomed. Mater. Res. Part A 2004, 71, 391–402. [Google Scholar] [CrossRef]
- Gueiral, N.; Nogueira, E. Acoustic Emission Studies in Hip Arthroplasty—Peak Stress Impact In Vitro Cemented Prosthesis. In Recent Advances in Arthroplasty; Fokter, S.K., Ed.; IntechOpen: Rijeka, Croatia, 2012. [Google Scholar] [CrossRef] [Green Version]
- Mavrogordato, M.; Taylor, M.; Taylor, A.; Browne, M. Medical Engineering & Physics Real time monitoring of progressive damage during loading of a simplified total hip stem construct using embedded acoustic emission sensors. Med. Eng. Phys. 2011, 33, 395–406. [Google Scholar] [CrossRef]
- Davies, J.P.; Tse, M.K.; Harris, W.H. In vitro evaluation of bonding of the cement-metal interface of a total hip femoral component using ultrasound. J. Orthop. Res. 1995, 13, 335–338. [Google Scholar] [CrossRef]
- Rodgers, W.; Welsh, R.; King, L.J.; Fitzpatrick, A.J.; Wood, T.B.F.; Hooper, G.J. Signal processing and event detection of hip implant acoustic emissions. Control Eng. Pract. 2017, 58, 287–297. [Google Scholar] [CrossRef]
- Fitzpatrick, A.J.; Rodgers, G.W.; Hooper, G.J.; Woodfield, T.B.F. Biomedical Signal Processing and Control Development and validation of an acoustic emission device to measure wear in total hip replacements in-vitro and in-vivo. Biomed. Signal Process. Control 2017, 33, 281–288. [Google Scholar] [CrossRef]
- Arpaia, P.; Clemente, F.; Zanesco, A. Low-invasive diagnosis of metallic prosthesis osseointegration by electrical impedance spectroscopy. IEEE Trans. Instrum. Meas. 2007, 56, 784–789. [Google Scholar] [CrossRef]
- Arpaia, P.; Clemente, F.; Romanucci, C. In-vivo test procedure and instrument characterization for EIS-based diagnosis of prosthesis osseointegration. In Proceedings of the 2007 IEEE Instrumentation & Measurement Technology Conference IMTC 2007, Warsaw, Poland, 1–3 May 2007; pp. 1–6. [Google Scholar]
- Ruther, C.; Ewald, H.; Mittelmeier, W.; Fritsche, A.; Bader, R.; Kluess, D. A novel sensor concept for optimization of loosening diagnostics in total hip replacement. J. Biomech. Eng. 2011, 133, 104503. [Google Scholar] [CrossRef] [PubMed]
- Burton, A.R.; Sun, P.; Lynch, J.P. Bio-compatible wireless inductive thin-film strain sensor for monitoring the growth and strain response of bone in osseointegrated prostheses. Struct. Health Monit. 2019, 1–19. [Google Scholar] [CrossRef]
- McGilvray, K.C.; Unal, E.; Troyer, K.L.; Santoni, B.G.; Palmer, R.H.; Easley, J.T.; Demir, H.V.; Puttlitz, C.M. Implantable microelectromechanical sensors for diagnostic monitoring and post-surgical prediction of bone fracture healing. J. Orthop. Res. 2015, 33, 1439–1446. [Google Scholar] [CrossRef]
- Ledet, E.H.; Liddle, B.; Kradinova, K.; Harper, S. Smart implants in orthopedic surgery, improving patient outcomes: A review. Innov. Entrep. Health 2018, 5, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Torrão, J.N.D.; Soares dos Santos, M.P.; Ferreira, J.A.F. Instrumented knee joint implants: Innovations and promising concepts. Expert Revi. Med. Devices 2015, 12, 571–584. [Google Scholar] [CrossRef]
- Karipott, S.S.; Nelson, B.D.; Guldberg, R.E.; GheeOng, K. Clinical potential of implantable wireless sensors for orthopedic treatments. Expert Revi. Med. Devices 2018, 15, 1–10. [Google Scholar] [CrossRef]
- Varga, M.; Wolter, K.J. Sensors and imaging methods for detecting loosening of orthopedic implants. In Proceedings of the IEEE 20th International Symposium for Design and Technology in Electronic Packaging (SIITME), Bucharest, Romania, 23–26 October 2014; pp. 333–335. [Google Scholar]
- O’Connor, C.; Kiourti, A. Wireless Sensors for Smart Orthopedic Implants. J. Bio-Tribo-Corros. 2017, 3, 1–8. [Google Scholar] [CrossRef]
















| Methodologies | Fixation | Methods | Requirements c | |||||
|---|---|---|---|---|---|---|---|---|
| (1) | (2) | (3) | (4) | (5) | (6) | |||
| Vibrometric | Cementless | Ext. Mechanical Excitation/Ext. Mechanical Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ |
| Ext. Magnetic Induction/Ext. Mechanical Signal | ✓ | ✓ | ✗ | ✓ | ✗ | ✓ | ||
| Int. Mechanical Excitation/Ext. Mechanical Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ | ||
| Cemented | Ext. Mechanical Excitation/Ext. Mechanical Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ | |
| Ext. Mechanical Excitation/Int. Mechanical Signal | ✓ | ✓ | ✗ | ✓ | ✗ | ✓ | ||
| Acoustic | Cementless | Ext. Mechanical Excitation/Ext. Acoustic Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ |
| Int. Mechanical Excitation/Ext. Acoustic Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ | ||
| Ext. Magnetic Induction/Ext. Acoustic Signal | ✓ | ✓ | ✗ | ✓ | ✗ | ✓ | ||
| Cemented | Ext. Mechanical Excitation/Ext. Acoustic Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ | |
| Int. Mechanical Excitation/Ext. Acoustic Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ | ||
| Int. Mechanical Excitation/Int. Acoustic Signal | ✓ | ✓ | ✗ | ✓ | ✗ | ✓ | ||
| Ext. Acoustic Emission/Ext. Acoustic Signal | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ | ||
| Bioelectric Impedance | Cementless | Ext. Electrical Current/Ext. Electric Potential Difference | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ |
| Magnetic Induction | Cementless | Ext. Magnetic Induction/Ext. Magnetic Induction | ✓ | ✓ | ✗ | ✓ | ✗ | ✓ |
| Strain | Cementless | Int. Mechanical Loads/Int. Bone Deformation | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ |
| Int. Mechanical Loads/Int. Fixation Plate Deformation | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cachão, J.H.; Soares dos Santos, M.P.; Bernardo, R.; Ramos, A.; Bader, R.; Ferreira, J.A.F.; Torres Marques, A.; Simões, J.A.O. Altering the Course of Technologies to Monitor Loosening States of Endoprosthetic Implants. Sensors 2020, 20, 104. https://doi.org/10.3390/s20010104
Cachão JH, Soares dos Santos MP, Bernardo R, Ramos A, Bader R, Ferreira JAF, Torres Marques A, Simões JAO. Altering the Course of Technologies to Monitor Loosening States of Endoprosthetic Implants. Sensors. 2020; 20(1):104. https://doi.org/10.3390/s20010104
Chicago/Turabian StyleCachão, João Henrique, Marco P. Soares dos Santos, Rodrigo Bernardo, António Ramos, Rainer Bader, Jorge A. F. Ferreira, António Torres Marques, and José A. O. Simões. 2020. "Altering the Course of Technologies to Monitor Loosening States of Endoprosthetic Implants" Sensors 20, no. 1: 104. https://doi.org/10.3390/s20010104
APA StyleCachão, J. H., Soares dos Santos, M. P., Bernardo, R., Ramos, A., Bader, R., Ferreira, J. A. F., Torres Marques, A., & Simões, J. A. O. (2020). Altering the Course of Technologies to Monitor Loosening States of Endoprosthetic Implants. Sensors, 20(1), 104. https://doi.org/10.3390/s20010104