Combining a Modified Particle Filter Method and Indoor Magnetic Fingerprint Map to Assist Pedestrian Dead Reckoning for Indoor Positioning and Navigation


Abstract
:1. Introduction
2. Methodology
2.1. Accelerometer Data and Pace Detection
2.2. Heading Direction Calculation
2.3. Step Length
2.4. Pedestrian Dead Reckoning
2.5. Magnetic Field Intensity Values and Fingerprint Recognition Elements
2.6. Magnetic Field Positioning
2.7. Particle Filter
3. Study Area and Data Collection
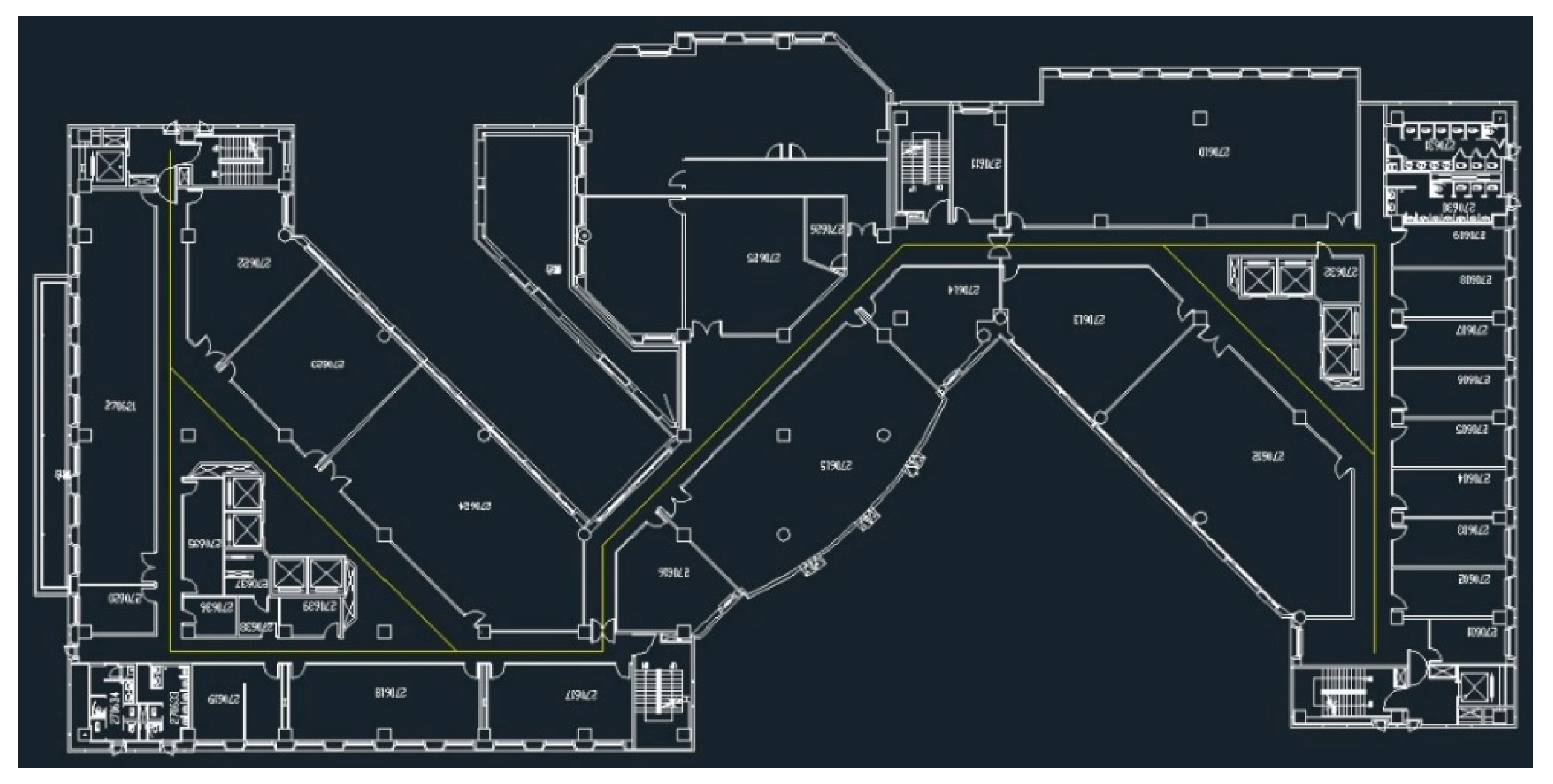
3.1. Experimental Area
3.2. Magnetic Field Fingerprint Map Results
4. Positioning Results
4.1. Comparison of Different Methods
4.2. Results of the Modified Particle Filter Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mautz, R. Indoor Positioning Technologies. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2012. [Google Scholar]
- Renaudin, V.; Combettes, C. Magnetic, acceleration fields and gyroscope quaternion (MAGYQ) based attitude estimation with smartphone sensors for indoor pedestrian navigation. Sensors 2014, 14, 22864–22890. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LI, Y.-S.; Ning, F.-S. Low-Cost Indoor Positioning Application Based on Map Assistance and Mobile Phone Sensors. Sensors 2018, 18, 4285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zou, Y.; Wang, G.; Wu, K.; Ni, L.M. Smartscanner: Know more in walls with your smartphone! IEEE Trans. Mob. Comput. 2015, 15, 2865–2877. [Google Scholar] [CrossRef]
- Huang, H.; Qiu, K.; Li, W.; Luo, D. PDR Combined with Magnetic Fingerprint Algorithm for Indoor Positioning. Proceedings 2019, 4, 24. [Google Scholar]
- Ma, Z.; Poslad, S.; Hu, S.; Zhang, X. A fast path matching algorithm for indoor positioning systems using magnetic field measurements. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–5. [Google Scholar]
- Chen, W.; Chen, R.; Chen, Y.; Kuusniemi, H.; Wang, J. An effective pedestrian dead reckoning algorithm using a unified heading error model. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 340–347. [Google Scholar]
- Pratama, A.R.; Hidayat, R. Smartphone-based pedestrian dead reckoning as an indoor positioning system. In Proceedings of the 2012 International conference on system engineering and technology (ICSET), Bandung, Indonesia, 11–12 September 2012; pp. 1–6. [Google Scholar]
- Kourogi, M.; Ishikawa, T.; Kameda, Y.; Ishikawa, J.; Aoki, K.; Kurata, T. Pedestrian dead reckoning and its applications. In Proceedings of the Let’s Go Out Workshop in Conjunction with ISMAR, Orlando, FL, USA, 19–22 October 2009. [Google Scholar]
- Castañón–Puga, M.; Salazar, A.S.; Aguilar, L.; Gaxiola-Pacheco, C.; Licea, G. A novel hybrid intelligent indoor location method for mobile devices by zones using Wi-Fi signals. Sensors 2015, 15, 30142–30164. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.-A.; Wang, G.; Hu, Y.; Wu, D. Heading estimation for indoor pedestrian navigation using a smartphone in the Pocket. Sensors 2015, 15, 21517–21536. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Wei, J.; Zhang, B.; Yang, W. A robust method to detect zero velocity for improved 3D personal navigation using inertial sensors. Sensors 2015, 15, 7708–7727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Liu, X.; Yu, B.; Jia, R.; Gan, X. Pedestrian Dead Reckoning Based on Motion Mode Recognition Using a Smartphone. Sensors 2018, 18, 1811. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, J.K.; Chiang, K.W.; Zhou, Z.M.; Li, Z.H. Using the on-line smoothing and constraint algorithms to improve the accuracy of pedestrian indoor navigation. J. Photogramm. Remote Sens. 2016, 21, 107–123. [Google Scholar]
- Ali, A.S.; Siddharth, S.; El-Sheimy, N.; Syed, Z.F. An improved personal dead-reckoning algorithm for dynamically changing smartphone user modes. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2432–2439. [Google Scholar]
- Ning, F.S.; Wu, D.C. The study of using smart mobile device for step length estimation and step detection. Taiwan J. Geoinform. 2013, 4, 103–116. [Google Scholar]
- Schafer, R.W. What is a Savitzky-Golay filter. IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]
- Tateno, S.; Cho, Y.; Li, D.; Tian, H.; Hsiao, P. Improvement of pedestrian dead reckoning by heading correction based on optimal access points selection method. In Proceedings of the 2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Kanazawa, Japan, 19–22 September 2017. [Google Scholar] [CrossRef]
- Renaudin, V.; Susi, M.; Lachapelle, G. Step length estimation using handheld inertial sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the Submitted to International Conference on Indoor Positioning and Indoor Navigation (IPIN2012.), Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Sterling, G. Magnetic Positioning: The Arrival of Indoor GPS. Report of Opus Research 2014. Available online: https://www.indooratlas.com/2014/06/01/magnetic-positioning-the-arrival-of-indoor-gps/ (accessed on 27 December 2019).
- Gozick, B.; Subbu, K.P.; Dantu, R.; Maeshiro, T. Magnetic maps for indoor navigation. IEEE Trans. Instrum. Meas. 2011, 60, 3883–3891. [Google Scholar] [CrossRef]
- Le Grand, E.; Thrun, S. 3-axis magnetic field mapping and fusion for indoor localization. In Proceedings of the 2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Hamburg, Germany, 13–15 September 2012; pp. 358–364. [Google Scholar]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A reliability-augmented particle filter for magnetic fingerprinting based indoor localization on smartphone. IEEE Trans. Mob. Comput. 2015, 15, 1877–1892. [Google Scholar] [CrossRef]
- Potortì, F.; Crivello, A.; Barsocchi, P.; Palumbo, F. Evaluation of indoor localisation systems: Comments on the ISO/IEC 18305 standard. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–7. [Google Scholar]
- Lee, N.; Ahn, S.; Han, D. AMID: Accurate Magnetic Indoor Localization Using Deep Learning. Sensors 2018, 18, 1598. [Google Scholar] [CrossRef] [PubMed] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Typical Accuracy | Typical Coverage (m) | Typical Measuring Principle | Typical Application |
|---|---|---|---|---|
| Cameras | 0.1 mm–dm | 1–10 | Angle measurements from images | Metrology, robot navigation |
| Infrared | cm–m | 1–5 | Thermal imaging, active beacons | People detection, tracking |
| Tactile and Polar Systems | μm–mm | 3–2000 | Mechanical, interferometry | Automotive, metrology |
| Sound | cm | 2–10 | Distances from time of arrival | Hospital, tracking |
| WLAN/Wi-Fi | m | 20–50 | Fingerprinting | Pedestrian navigation, lbs |
| RFID | dm–m | 1–50 | Proximity detection, fingerprinting | Pedestrian navigation |
| Ultra-Wideband | cm–m | 1–50 | Body reflection, time of arrival | Robotics, automation |
| High Sensitive GNSS | 10 m | global | Parallel correlation, assistant GPS | Location based services |
| Pseudolites | cm–dm | 10–1000 | Carrier phase ranging | Gnss challenged pit mines |
| Other Radio Frequencies | m | 10–1000 | Fingerprinting, proximity | Person tracking |
| Inertial Navigation | 1% | 10–100 | Dead reckoning | Pedestrian navigation |
| Magnetic Systems | mm–cm | 1–20 | Fingerprinting and ranging | Hospital, mines |
| Infrastructure Systems | cm–m | building | Fingerprinting, capacitance | Ambient assisted living |
| Technology | Accuracy | Advantages | Disadvantages |
|---|---|---|---|
| Bluetooth/iBeacon | cm–m |
|
|
| RFID | dm–m |
|
|
| Wi-Fi | m |
|
|
| Zigbee | m |
|
|
| UWB | cm |
|
|
| No. | Closure Error (m) | Relative Precision | Check Point 1 Error (m) | Check Point 2 Error (m) | Check Point 3 Error (m) |
|---|---|---|---|---|---|
| 1 | 0.346 | 1/402 | 1.067 | 0.666 | 0.651 |
| 2 | 0.958 | 1/145 | 0.869 | 1.211 | 0.399 |
| 3 | 2.145 | 1/65 | 0.971 | 1.017 | 0.596 |
| 4 | 2.628 | 1/53 | 1.011 | 1.542 | 0.322 |
| 5 | 0.487 | 1/286 | 0.721 | 2.435 | 3.071 |
| 6 | 1.126 | 1/123 | 0.603 | 1.019 | 0.643 |
| 7 | 1.210 | 1/115 | 0.283 | 1.448 | 0.666 |
| 8 | 1.293 | 1/107 | 1.072 | 1.414 | 0.920 |
| 9 | 1.971 | 1/71 | 1.964 | 1.291 | 2.100 |
| 10 | 0.889 | 1/156 | 1.160 | 0.907 | 1.278 |
| Mean | 1.305 | 1/106 | 0.972 | 1.295 | 1.065 |
| No. | Closure Error (m) | Relative Precision | Check Point 1 Error (m) | Check Point 2 Error (m) | Check Point 3 Error (m) |
|---|---|---|---|---|---|
| 1 | 0.545 | 1/255 | 1.297 | 1.299 | 0.599 |
| 2 | 0.585 | 1/238 | 0.407 | 0.388 | 0.829 |
| 3 | 2.174 | 1/64 | 0.272 | 0.245 | 0.334 |
| 4 | 0.990 | 1/140 | 0.552 | 0.744 | 0.216 |
| 5 | 0.303 | 1/458 | 0.241 | 0.419 | 0.629 |
| 6 | 1.095 | 1/127 | 0.702 | 0.718 | 0.788 |
| 7 | 0.266 | 1/523 | 0.202 | 1.079 | 0.626 |
| 8 | 0.884 | 1/157 | 0.452 | 1.539 | 0.503 |
| 9 | 0.424 | 1/328 | 0.289 | 1.027 | 0.751 |
| 10 | 1.448 | 1/96 | 0.595 | 0.579 | 0.420 |
| Mean | 0.871 | 1/160 | 0.501 | 0.804 | 0.569 |
| Male (m) | Female (m) | |
|---|---|---|
| Average closure error (Go) | 1.101 | 0.753 |
| Average closure error (Back) | 0.580 | 0.318 |
| Average error in the path | 0.643 | 0.663 |
| Relative accuracy in the path | 1/216 | 1/210 |
| Literature Authors | Positioning Method | Accuracy (m) | Precision (m) | Testing Area Size |
|---|---|---|---|---|
| Le Grand and Thrun, 2012 [23] | Particle Filter | 0.95 | 0.7 for line 1.2 for circle | 7 m × 7 m 4 m × 4 m |
| Xie et al., 2015 [24] | Particle Filter | 1.0 | 80% within 1.6 50% within 0.8 | 72 m × 64 m |
| Lee, Ahn, and Han, 2018 [26] | Deep Leaning-based Classification | 1.7 | 80% within 2 50% within 0.8 | 15 m × 22 m 15 m × 65 m |
| Huang et al., 2018 [5] | Particle Filter | 1.13 | 80% within 1.5 50% within 1 | 1.5 m × 10 m |
| This Study | Modified Particle Filter | 0.7 | 80% within 1 50% within 0.64 | 33 m × 85 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, F.-S.; Chen, Y.-C. Combining a Modified Particle Filter Method and Indoor Magnetic Fingerprint Map to Assist Pedestrian Dead Reckoning for Indoor Positioning and Navigation. Sensors 2020, 20, 185. https://doi.org/10.3390/s20010185
Ning F-S, Chen Y-C. Combining a Modified Particle Filter Method and Indoor Magnetic Fingerprint Map to Assist Pedestrian Dead Reckoning for Indoor Positioning and Navigation. Sensors. 2020; 20(1):185. https://doi.org/10.3390/s20010185
Chicago/Turabian StyleNing, Fang-Shii, and Yu-Chun Chen. 2020. "Combining a Modified Particle Filter Method and Indoor Magnetic Fingerprint Map to Assist Pedestrian Dead Reckoning for Indoor Positioning and Navigation" Sensors 20, no. 1: 185. https://doi.org/10.3390/s20010185