1. Introduction
Flying ad hoc network (FANET) is a branch of networking that provides communication among flying nodes, particularly unmanned aerial vehicles (UAVs), with base station (BS) [
1]. Flying UAVs are autonomous nodes capable of making decisions (e.g., changing speed and direction) in the air in a distributed manner rather than receiving decisions made from the ground in a centralized manner [
2,
3]. FANET has distinguishing features compared to existing ad hoc networks such as mobile ad hoc networks (MANETs) [
4] and vehicular ad hoc networks (VANETs) [
5]. In general, the flying nodes are prone to frequent link disconnections and network partitions due to the following:
Movement in the three-dimensional space (against movement that is confined to roads and highways in VANETs [
6]).
Flying speed ranges from 30 to 460 km/h [
7] (against driving speed that ranges from 10 to 120 km/h [
8,
9]).
Low node density (against high node density in urban areas in VANETs). In addition, the flying nodes, which are generally equipped with batteries that provide limited energy, have high energy consumption [
10].
This means that frequent disconnections cannot be addressed by increasing the transmission power to provide long-range communication in FANETs. Hence, establishing long-term, reliable, and robust connections and routes is essential to increase route lifetime and to improve quality of service (QoS) (e.g., low latency and route setup time), yet it is challenging in FANETs. Nevertheless, the flying nodes naturally have a) a large coverage and b) minimal effects of obstacles (e.g., buildings and trees) and bad weather due to its elevated look angle [
7].
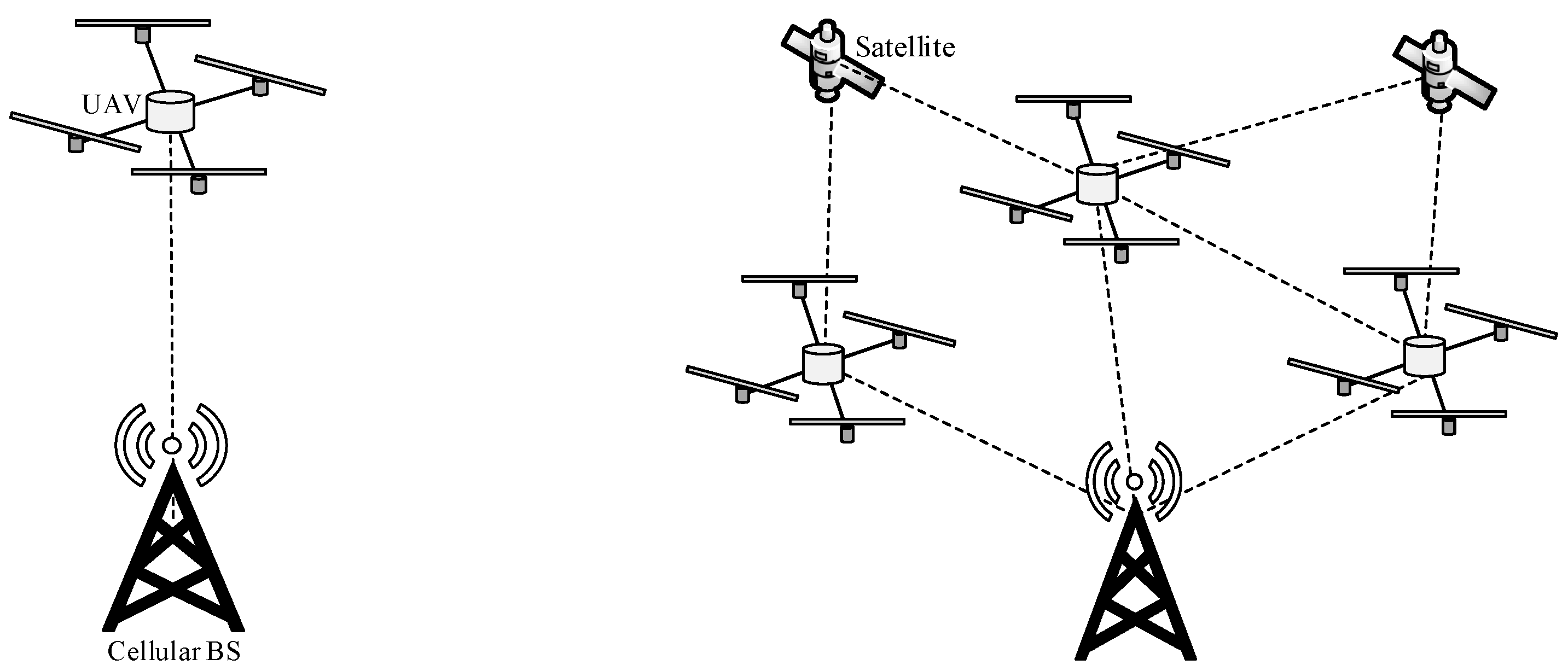
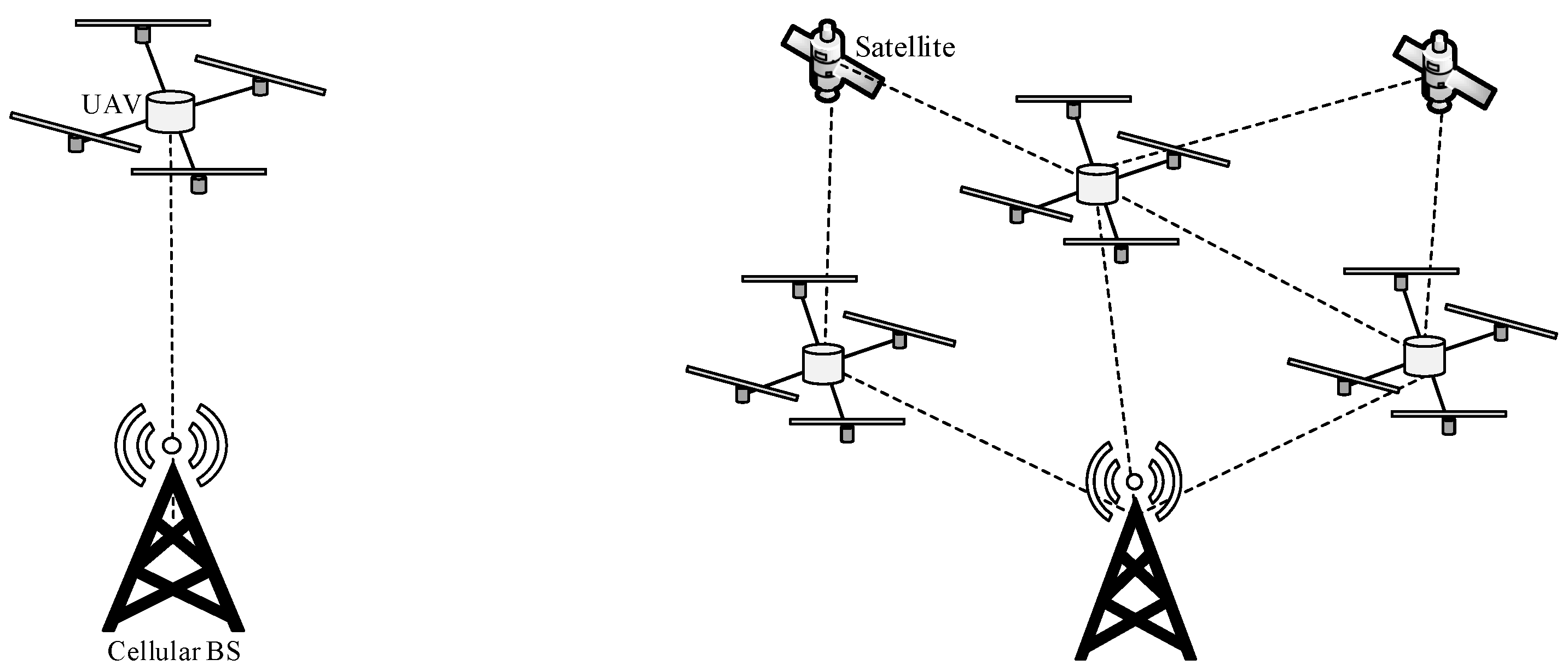
Figure 1 shows two scenarios, namely the single-UAV and multi-UAV scenarios. In the single-UAV scenario, a single UAV establishes a connection to a radio access infrastructure (i.e., FANET base station (BS), cellular BS, and satellite). In the multi-UAV scenario, multiple UAVs cooperate and establish an ad hoc network. Compared to the single-UAV scenario, the multi-UAV scenario provides three main advantages [
11]. Firstly, FANETs increase network scalability as multiple UAVs can increase coverage [
12,
13,
14]. Secondly, FANETs increase network survivability (or network robustness and reliability) in a dynamic operating environment (e.g., due to poor weather condition) as multiple UAVs can either connect with each other to form an ad hoc network or to connect to radio access infrastructure directly [
15]. The presence of a large swarm of UAVs (or multi-UAV swarm) [
16,
17] can cater to the failure of a UAV during operations [
18,
19]. Thirdly, FANETs can distribute payload among UAVs, which helps to reduce the weight of each UAV and, hence, the required energy for the UAV to reach and maintain a targeted altitude, leading to a longer route lifetime [
20].
The multi-UAV scenario can be extended to multi-UAV swarm, whereby a large swarm of autonomous, small-sized, and lightweight UAVs are deployed. The multi-UAV swarm can coordinate and prevent collisions among themselves while completing tasks that require a large swarm of UAVs, such as surveillance [
16] and search and rescue missions during catastrophe [
17] and gathering a swarm of UAVs at a target location [
21]. The multi-UAV swarm can be used to upload a huge amount of data collected in a distributed manner (e.g., data collected from cellular users) to the base station. In Reference [
22], a multi-UAV swarm with high mobility uses a store-carry-forward approach to capture and transfer images and videos from a post-disaster area to the base station. In Reference [
23], a multi-UAV swarm senses and allocates subchannels for UAV-to-X communication in a collaborative manner in order to maximize the sum-rate of uplinks while optimizing the speed of UAVs. In Reference [
24], a multi-UAV swarm, which consists of flexible aerial nodes, is deployed to form an emergency network that can recover communication rapidly in a catastrophic area. In Reference [
25], UAVs embedded with solar panels, together with solar-powered charging stations, are deployed to overcome energy constraint in order to fulfill the energy, communication, and safety requirements of 5G. In Reference [
26], Euclidean distance is measured and it is used to adjust the transmission power for hello messages in order to reduce energy consumption. The number of UAVs required to achieve network performance requirements, such as throughput and packet delivery ratio, are also considered with the objective of minimizing energy consumption. In Reference [
27], the secrecy outage probability and the average secrecy capacity of a multi-UAV swarm are derived in order to prevent eavesdropping.
1.1. Our Contribution
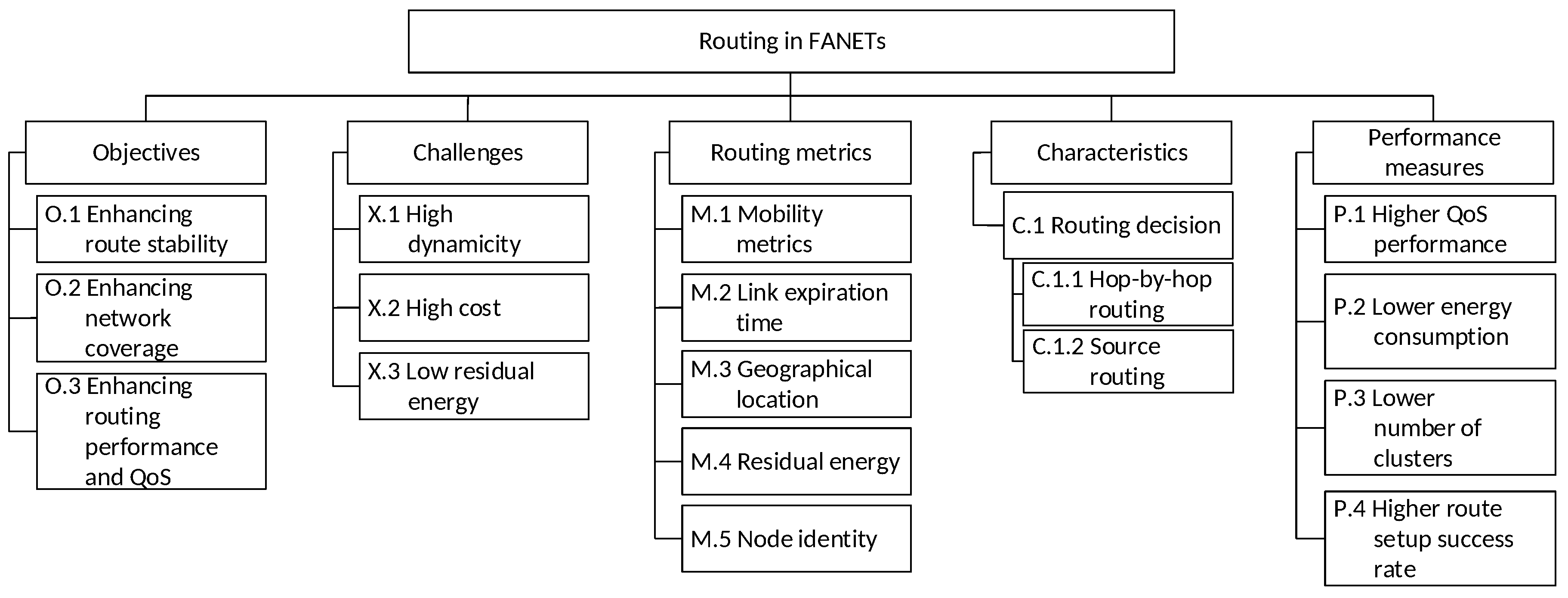
In view of the limited research work of routing schemes in FANETs and the lack of focus on the main characteristics of FANETs, such as the three-dimensional movement and mobility, this paper provides a comprehensive survey to stimulate research interest in this topic. Various routing schemes are classified, analyzed, and discussed based on a taxonomy. Open issues are outlined.
Table 1 summarizes papers conducting surveys on FANETs, covering various foci, which are self-explanatory given examples, as follows:
Motivation for the need of FANETs and an explanation of their unique characteristics;
Comparison with other ad hoc networks, such as MANETs and VANETs;
Requirements, such as the bandwidth and energy requirements of the flying nodes;
Mobility models of the flying nodes, such as random waypoint and Manhattan;
Taxonomy that covers various FANET attributes;
Objectives, such as achieving the awareness of energy consumption and cost;
Challenges, such as high energy consumption and number of retransmissions;
Routing metrics, such as the residual energy level and the distance between flying nodes;
Characteristics, such as the transmission range of flying nodes and the number of nodes in a network;
Performance measures, such as the number of clusters in a network and cost;
Open issues, such as enhancing QoS and addressing the dynamicity of network topology.
To the best of our knowledge, this paper is the first of its kind to provide a comprehensive survey of routing schemes in FANETs, covering a diverse range of aspects. As shown in
Table 1, surveys of routing schemes in FANETs have been conducted in the literature with a diverse range of foci [
18,
32,
35,
37,
39,
41], such as hierarchical and data centric approaches [
18]; geographical location-based approaches [
35]; as well as proactive, reactive, and hybrid routing schemes based on MANETs and VANETs [
32]. In addition, although existing papers (see
Table 1), including the surveys of routing schemes in FANETs, present taxonomies that categorize routing schemes and mobility models in FANETs, this paper presents a taxonomy that covers various aspects, including objectives, challenges, routing metrics, characteristics, and performance measures.
1.2. Significance of Our Work
Apart from being a comprehensive survey that covers a diverse range of foci as shown in
Table 1, this paper provides some distinguishing aspects. Firstly, it provides motivation for the topic, answering questions such as: “How do FANETs differ from other kinds of ad hoc networks?”, “What are the roles of FANETs?”, “What are the requirements of routing in FANETs?”, “What are the mobility models in FANETs?”, and “What are the roles of artificial intelligence in FANETs?”. Secondly, a comprehensive taxonomy for routing in FANETs is provided, and it is used to capture various aspects of the state-of-the-art routing schemes in FANETs. Finally, some significant open issues in this topic are first presented for the first time in the literature. Hence, this paper has laid a strong foundation for future investigations in routing in FANETs.
1.3. Organization of This Paper
The rest of this paper is organized as follows:
Section 2 presents background and the motivation for the need to investigate routing schemes in FANETs.
Section 3 presents the taxonomy and framework of routing schemes in FANETs.
Section 4 presents the framework of routing schemes in FANETs.
Section 5 presents a discussion of various routing schemes in FANETs based on the taxonomy.
2. Background and Motivating the Need for FANETs
FANET has distinguishing features (e.g., high dynamicity of network topology, large coverage, and limited energy) as compared to other kinds of ad hoc networks (e.g., MANETs and VANETs). Hence, in FANETs, flying nodes can join and leave a highly dynamic ad hoc network, which causes frequent link disconnections and route breakages. This has motivated researchers to investigate FANETs.
2.1. How Do FANETs Differ from Other Kinds of Ad Hoc Networks?
Ad hoc network is composed of geographically distributed connected devices that can communicate with each other over a wireless medium. In general, it is deployed to support short-term applications, such as military usage, video conferencing, infotainment, as well as disaster relief and rescue operation, for a short time period. The ad hoc network is different from a cellular network because the former, which lacks a fixed infrastructure and powered by battery, must perform computation in a distributed manner; hence, energy efficiency is a major concern [
42,
43].
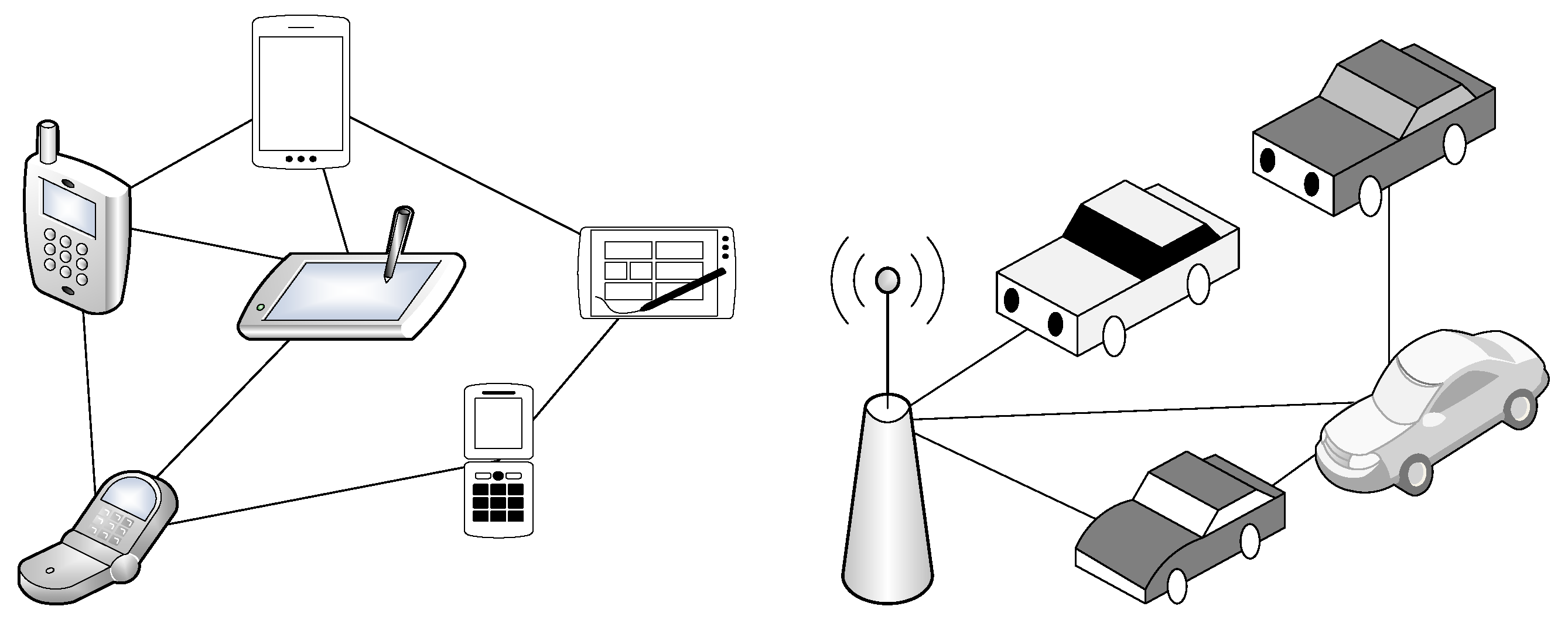
Table 2 compares and contrasts the three main kinds of ad hoc networks, namely MANETs, VANETs, and FANETs, shown in
Figure 2. Due to the differences among the ad hoc networks, novel routing schemes must be designed to cater to the main characteristics of FANETs.
2.1.1. How Do FANETs Differ from MANETs and VANETs in Terms of the Types of Links?
Table 2 compares the types of links in FANETs with those in MANETs and VANETs [
44,
45,
46,
47].
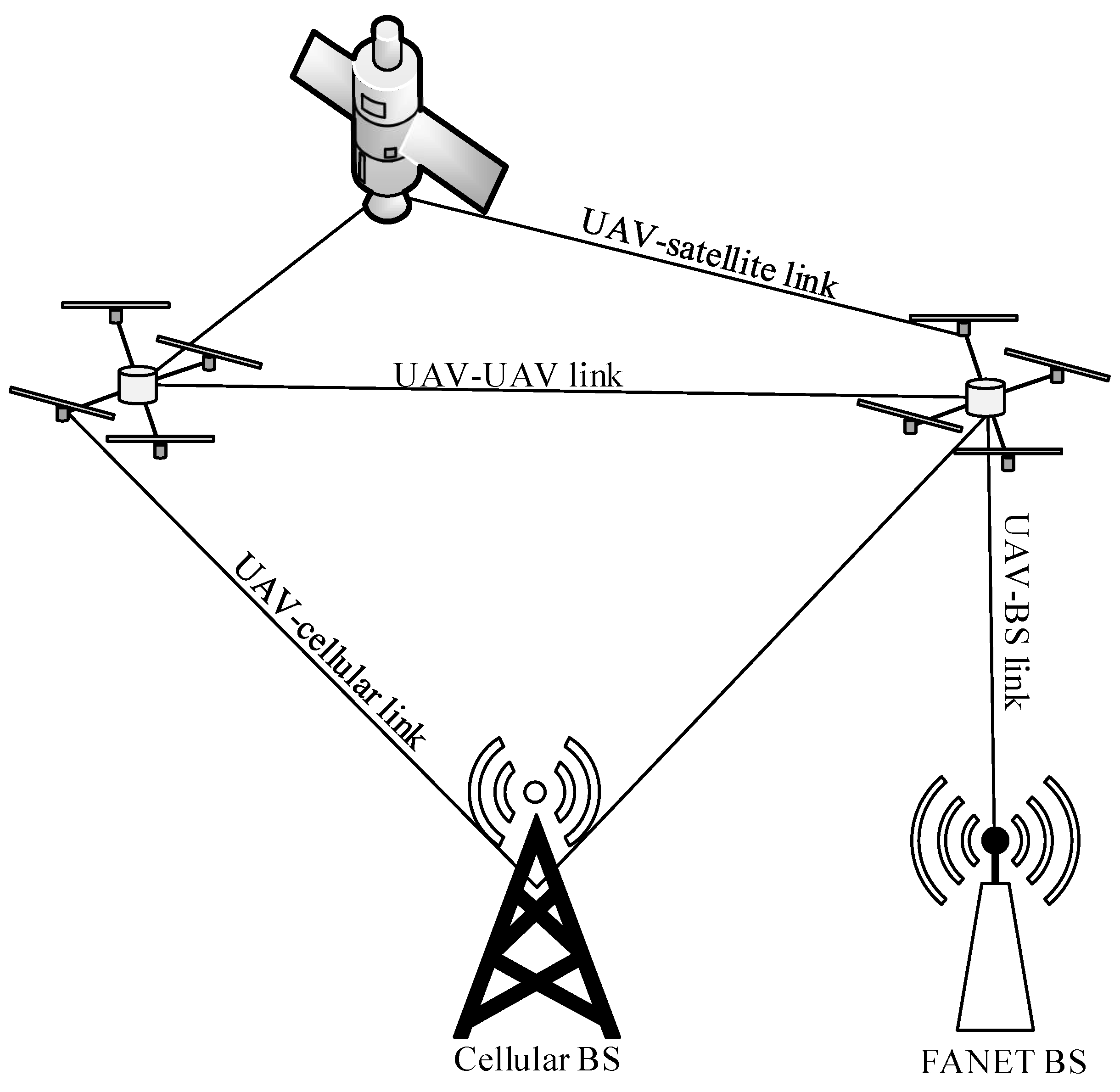
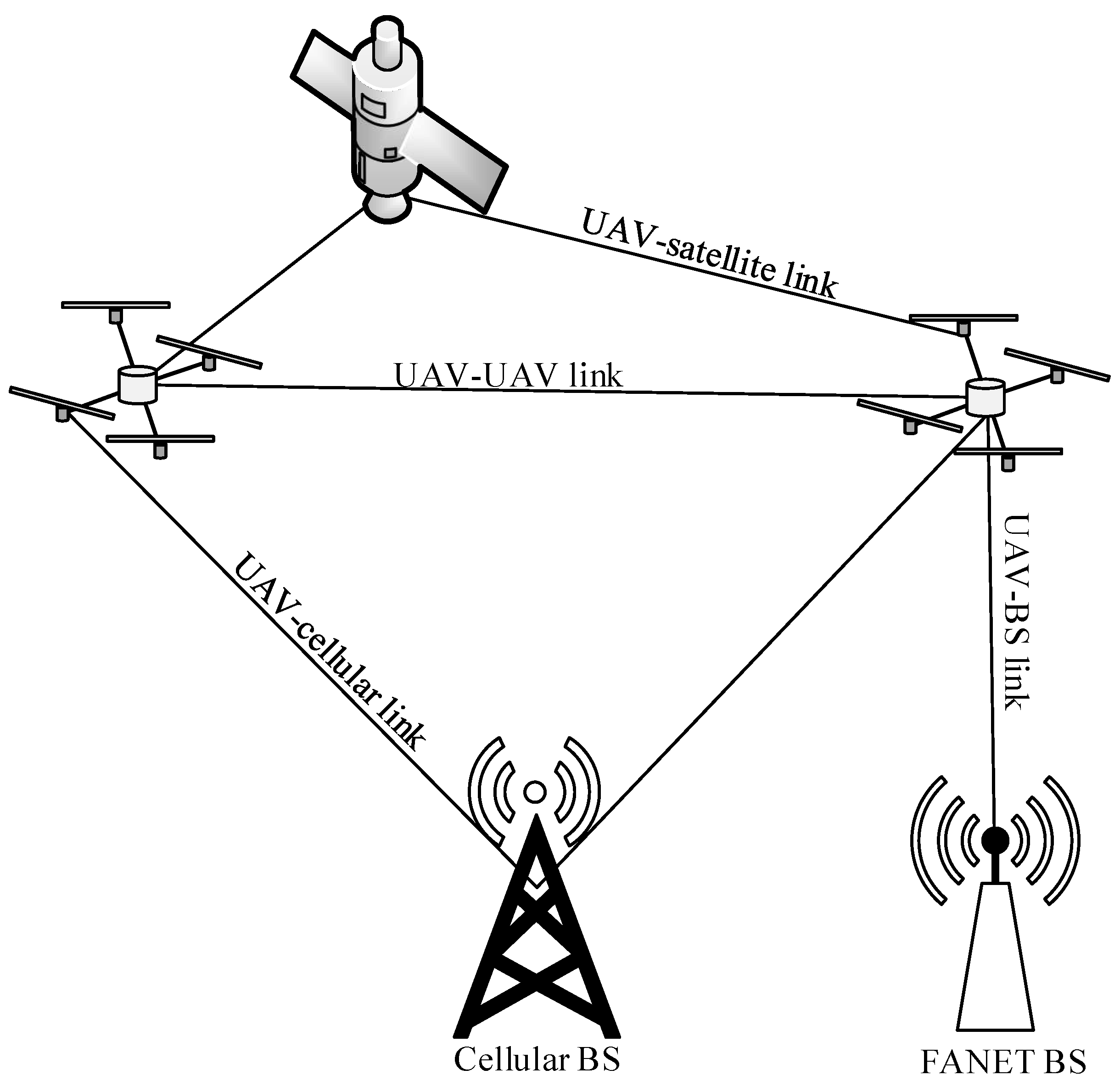
There are four main types of links among UAVs and different radio access infrastructure (i.e., FANET BS, cellular BS, and satellite) in ad hoc networks [
48,
49] as shown in
Figure 3:
a UAV–UAV link between a UAV and another UAV that supports ad hoc communication. This link is part of a route so that intermediate UAVs can forward packets towards a radio access infrastructure.
a UAV–BS link (or a direct link) between a UAV and a FANET BS.
a UAV–cellular link between a UAV and a cellular BS.
a UAV–satellite link, which is a long-range terrestrial link, between a UAV and a satellite. The UAVs can form a star topology with the satellite. This link is necessary in the absence of other radio access infrastructure (i.e., FANET BS and cellular BS).
The radio access infrastructure is prone to failure during disaster. Hence, the ad hoc network, which is formed using UAV–UAV links, is more robust and easy to deploy, although routing is necessary to establish routes.
2.1.2. How Do FANETs Differ from MANETs and VANETs in Terms of Characteristics?
Table 2 compares the parameters and characteristics of FANETs with those of MANETs and VANETs as follows:
Mobility degree (or the dynamicity of network topology) of FANETs is high (i.e., 30–460 km/h [
20]) compared to MANETs (i.e., 5–50 km/h [
50]) and VANETs (i.e., 10–120 km/h [
8,
9]). Hence, in FANET, the highly dynamic network topology causes frequent link disconnections and network partitions, resulting in low link quality [
51,
52].
Mobility models of FANETs is different in terms of the capabilities of devices (e.g., UAVs move in the three-dimensional space, while nodes and vehicles in MANETs and VANETs move in a two-dimensional space) and the operating environment (e.g., FANETs operate in the sky, while MANETs operate in the terrain most of the time using random waypoint as it also considered harmful [
53] but other model in random trip model [
54] and VANETs operate in the highways using prediction based model). Examples of mobility models for FANETs are semi-random circular movement (SRCM) model [
55,
56], realistic model, and random waypoint model [
57]. More details about the mobility models are presented in
Section 2.4.
Energy constraint in FANETs is moderate [
7] compared to MANETs (i.e., has the highest energy constraint) and VANETs (i.e., has the lowest energy constraint). The availability of energy affects route lifetime, and so, small UAVs must conserve energy to support long flight time. In VANETs, vehicles are generally powered by vehicular battery with less energy constraint.
Availability of line of sight (LOS) between UAVs is commonplace in FANETs contributing to higher robustness of a link, while there may be non-LOS (NLOS) in MANETs and VANETs as a result of obstacles in a link.
Localization method in FANETs, such as inertia measurement unit, provides accurate coordinates of a UAV and neighboring UAVs in a real-time manner [
58]. In contrast, MANETs use GPS to find the coordinates of nodes with an accuracy of 10–15 m [
59], while VANETs use assisted-GPS or differential-GPS with an accuracy of 10 cm to reduce collisions and find routes [
60].
Node density (or the number of nodes in a unit area) of FANETs is low compared to MANETs and VANETs. This means that UAVs are spaced far apart in the sky and that the distance between the UAVs is comparatively long. Lower node density can increase the effects of the dynamicity of network topology. Nevertheless, node density can be high for multi-UAV swarm whereby a large swarm of UAVs is deployed.
2.2. What Are the Roles of FANETs?
FANETs provide connectivity among flying nodes (e.g., UAVs) to support various short-term applications and tasks [
61]. Multiple UAVs can be deployed to fly over a targeted region and to perform surveillance, detection, and monitoring. The UAVs use sensors and cameras to capture real-time images, audios, and videos at remote and difficult-to-access areas and send the data to a BS immediately [
62]. Subsequently, the BS processes the data and generates messages, such as alert messages upon the detection of a disturbance or an event [
63]. The multi-UAV scenario has a significant impact to human life and activities [
64]. For instance, the use of the multi-UAV scenario to detect and monitor wildfire is foreseen to reduce the current 340,000 cases of casualties and the
million USD cost annually [
62,
65].
The multi-UAV scenario has been deployed to detect targets (i.e., to identify the position of a target) in search missions [
66], to provide bird’s-eye view for surveillance [
67,
68,
69], to monitor crops (e.g., identifying ripe and unripe crops) in agriculture [
70,
71], to monitor disaster [
72,
73,
74], and to monitor environment (e.g., wind [
75], temperature, humidity, light intensity, and the pollution level [
76,
77,
78]). Multi-UAVs also support other kinds of ad hoc networks, particularly MANETs and VANETs. For instance, the multi-UAV scenario has been deployed to monitor and manage traffic in VANETs [
79,
80]. The multi-UAV swarm scenario has been deployed to monitor and manage disaster and to perform surveillance in smart cities [
81].
2.3. What Are the Requirements of Routing in FANETs?
Routing in FANETs has four requirements as follows:
2.4. What Are the Mobility Models in FANETs?
Mobility models have been used to characterize the movement of UAVs, including the speed, direction, and acceleration of UAVs, in a fixed space. Such models have been used to develop real-time simulation environment for FANETs. The rest of this section presents various kinds of mobility models used in the investigation of FANETs.
2.4.1. Pure Randomized Mobility Models
The pure randomized mobility model has been widely used in ad hoc networks. There are four common characteristics. Firstly, nodes are independent on each other. Secondly, nodes are memoryless, and so, the new speed and direction of the nodes are independent on their previous speed and direction [
86]. Thirdly, nodes can move at any speed within a range (e.g., 30–460 km/h [
20]). Fourthly, nodes can move freely in an unpredictable manner in a fixed space at all times. The difference among the pure randomized mobility models lies in the way in which the direction of the nodes’ movement is determined.
- A.1
Random walk, which is based on the Brownian movement, allows a node to move in any directions
- A.2
Random waypoint [
87,
88] allows a node to move in different directions (i.e., either straight, left, or right, rather than backward) towards a destination [
89,
90]. When the node arrives at its destination inside a fixed space, it stops for a short period of time, which helps to prevent a drastic change in order to provide smooth movement, and then, it starts to move towards another randomly chosen destination.
- A.3
Random direction (or random mobility) shares the similar way in which the direction of a node’s movement is determined with random waypoint (A.2). The main difference is that a node must stop at the edge of a fixed space [
91]. This means that a destination must be located at the edge of a fixed space rather than inside the space.
- A.4
Manhattan grid allows a node to move in straight
x-axis and
y-axis directions in a grid road layout in urban areas. Specifically, the node moves in different directions (i.e., either straight, left, or right, rather than backward) to proceed or to turn to the left or right road at an intersection [
92].
2.4.2. Path-Planned Mobility Models
The path-planned mobility model forms predefined routes used by UAVs. There are three common characteristics. Firstly, nodes are independent on each other. Secondly, nodes are memoryless, and so, the new speed and direction of the nodes are independent on their previous speed and direction. Thirdly, nodes can move at any speed within a range.
- A.5
Semi-random circular movement (SRCM) allows a node to form a circular (or curve) route [
55]. When the node arrives at its destination following the route, it stops for a short period of time, and then, it starts to move towards another randomly chosen destination using a newly predefined route. The circular routes have been shown to reduce collisions between UAVs. This model is suitable for multi-UAV scenario.
2.4.3. Time-Dependent Mobility Models
The time-dependent mobility model minimizes acceleration and the drastic changes of direction in order to provide smooth movement (e.g., a smooth turn), which is more realistic [
93]. There are three common characteristics of this model. Firstly, nodes are dependent on each other, whereby the vehicular nodes follow one another (including speed and direction) on the road. Secondly, nodes are memory-based, and so, the new speed and direction of the nodes are dependent on their previous speed and direction. Thirdly, nodes can move at any speed within a range.
- A.6
Smooth turn (or realistic model) allows a node to choose a point and to form a circle around it, and then, it moves along the circle [
55]. When the node moves towards another randomly chosen destination, it chooses a new point and moves along another circle around the newly chosen point. Nevertheless, there is lack of collision avoidance [
94], which explain the need for better collaboration among nodes. This model is suitable for multi-UAV scenario.
2.5. What Are the Roles of Artificial Intelligence in FANETs?
Artificial intelligence (AI) approaches, including artificial neural network [
95], fuzzy logic [
96], reinforcement learning [
97], and particle swarm optimization [
98], has been adopted to improve the performance of complex systems in a diverse range of applications, such as FANETs. In FANETs, AI has been applied in routing [
99] so that a decision maker observes the state of the operating environment, selects the best possible action (e.g., a stable and reliable route), receives reward, and learns about the appropriateness of the action under the state based on the reward. For instance, a flying node (decision maker) observes the mobility pattern of neighboring nodes (state), selects a stable and reliable route (action), receives throughput performance (reward), and learns the best possible route as time goes by [
100]. In Reference [
99], AI is used to predict the geographical location of flying nodes in the selection of next-hop node in FANETs. In Reference [
101], AI is used to assist the nodes in VANETs and MANETs. In Reference [
102], AI is used to form clusters and improve energy efficiency. In Reference [
103], a swarm-based approach is applied to routing in a multi-UAV swarm scenario.
6. Open Issues
FANETs possess unique characteristics (e.g., high mobility degree, high dynamicity of network topology, low energy constraint, as well as different node densities in different network scenarios) that require novel routing schemes, although there are limited routing schemes for FANETs in the literature, but this survey paper can motivate researchers by identifying more research gaps in the respective domains. For instance, the high mobility degree characteristic has brought about three challenges to routing:
high dynamicity (X.1), whereby nodes with high mobility can cause significant changes to network topology;
high cost (X.2), whereby nodes with high mobility can cause link disconnections, resulting in high packet retransmission due to route failure, route discovery, and route maintenance;
low residual energy (X.3), whereby higher number of message exchanges can cause high energy consumption and shorter route lifetime.
Novel routing schemes can cater to the unique characteristics in order to achieve better network performance, such as higher QoS performance (P.1) (e.g., higher throughput, as well as lower packet loss rate and delay) and lower energy consumption (P.2). In addition, novel routing schemes must be designed to cater for next-generation applications, which have stringent QoS requirements, such as high throughput as well as low latency and packet loss rate in real-time surveillance with video, voice, and images.
Table 5 depicts the summary of open issues. The rest of this section presents open issues that can be pursued in this research topic.
6.1. Minimizing the Effects of Frequent Link Disconnections to Improve Routing
Frequent link disconnections and network partitions can increase route discovery and maintenance to reestablish routes as well as increase packet retransmission [
133]. Consequently, network performance degrades, which can be unacceptable in critical circumstances, such as disaster relief and rescue operations [
104,
134]. There are two main challenges in improving network connectivity: a) high dynamicity (X.1) of network topology and b) high cost (X.2) due to increased routing overhead, energy consumption, and computational cost. Addressing this open issue helps to achieve higher QoS performance (P.1), lower energy consumption (P.2), and higher route setup success rate (P.4). Further investigation could be pursued to reduce link disconnections and network partitions; for instance, the next geographical location of a UAV can be predicted and used to maintain a route or to select intermediate nodes of a route.
6.2. Performing Routing in the Multi-UAV Swarm Scenarios
In the multi-UAV swarm scenarios, a massive amount of data is generated by a large collection of autonomous, small-sized, and lightweight (or non-weight-carrying) UAVs, which is a scenario called ultra-densification. Multi-UAV swarm also possess unique characteristics of FANETs, such as high mobility degree and high dynamicity of network topology. In addition to high dynamicity (X.1) of network topology, high cost (X.2), and low residual energy (X.3), there are two new challenges: (a) high channel demand requires high channel capacity [
135,
136], and (b) high collision rate among UAVs in a large swarm of UAVs requires reliable communication [
137]. Further investigation could be pursued to investigate routing for reliable communication under different mobility models with different social behaviors of swarms (e.g., a school of fish, a swarm of bees, a swarm of ants, and a pack of wolves), levels of ultra-densification, and collision rates. Further investigation could also be pursued to design context-aware routing schemes that select next-hop and backhaul nodes (or BS) based on internal and external ambient factors, such as geographical location, the amount of fuel, and hardware capabilities, in order to establish long-term routes [
93].
6.3. Performing Clustering for Supporting Routing in Multi-UAVs
Due to ultra-densification in the multi-UAVs and multi-UAV swarm scenarios, essential collaborative tasks, such as data aggregation, load distribution, resource allocation, and local synchronization, are performed to cater to the massive amount of data generated by UAVs. Clustering (i.e., hierarchical routing) segregates nodes with similar characteristics and behaviors into logical groups in order to improve network stability and scalability; hence, it is suitable to support the collaborative tasks [
138]. Since clustering can increase network lifetime, it can increase route stability and lifetime [
139]. While clustering schemes have been proposed for FANETs [
103], there is a lack of focus on scenarios under ultra-densification. Since the network densification changes with geographical locations and time, further investigation could be pursued to perform clustering using context-aware approaches, such as artificial intelligence approaches and bio-inspired algorithms [
140].
6.4. Enhancing Mobility Models for the Investigation of Routing in FANETs
The mobility pattern of the UAVs are highly dynamic in the three-dimensional space, and they may be spaced far apart, causing link disconnection that reduces route lifetime. In addition to high dynamicity (X.1) of network topology, high cost (X.2), and low residual energy (X.3), there are two new challenges: (a) high mobility degree that causes the next geographical locations of nodes to become unpredictable and (b) movement in the three-dimensional space, which differs from the two-dimensional space in MANETs and VANETs [
137]. Nevertheless, some routing schemes have been investigated under two-dimensional space in FANETs, including those in References [
102,
103,
112]. To the best of our knowledge, an extensive mobility model that covers the two new challenges are yet to be investigated to support the investigation of routing in FANETs [
141]; nevertheless, movement with high mobility degree in a three-dimensional space is the core characteristic of FANETs. Further investigation could be pursued to enhance the mobility models so that the mobility characteristics and flight routes of UAVs emulate real-life scenarios in FANETs [
142].
6.5. Improving Network Performance and Survivability through Multi-Pathing
Frequent link disconnections and network partitions occur due to high dynamicity (X.1) of network topology, and so, route discovery and maintenance must be performed frequently to reestablish routes, resulting in higher cost (X.2). Multi-pathing establishes more than a single route so that (a) multiple routes can be used at the same time to maximize resource utilization [
143,
144] and to reduce network congestion [
145,
146], which is important under ultra-densification, and (b) a backup route is available when the current route is broken to improve network survivability and fault tolerance [
147], contributing to reduced routing overhead [
148]. Further investigation could be pursued to investigate multi-pathing to improve network performance and survivability. Context-aware approaches, such as artificial intelligence approaches and bio-inspired algorithms [
140], can be adopted to cater to the dynamic network condition that affects multi-pathing.
6.6. Improving Network Performance by Using Artificial Intelligence
Artificial intelligence (AI), such as deep learning and reinforcement learning, allows a system to autonomously learn from its operating environment and past experience in order to improve its performance as time goes by. AI plays a vital role in optimizing communication among flying nodes [
139,
149]. For instance, reinforcement learning enables UAVs to learn from their respective operating environment and to adjust their position and movement (i.e., speed and direction) accordingly. Learning enables UAVs to self-organize and to select optimal routes among themselves. Furthermore, AI can be embedded in ground stations to enhance FANETs, such as to detect the presence of UAVs, to monitor their movement and behavior as time goes by, to create channel model and utilization map, and to distribute traffic load among routes in the multi-UAV swarm scenario. Further investigation could be pursued to explore and exploit the AI domain to improve routing performance in FANETs.
6.7. Improving Network Coverage by Using High and Low Altitude UAVs
Frequent link disconnections and network partitions occur due to high dynamicity (X.1) of network topology, particularly when nodes move out of the coverage (or transmission range) of neighboring nodes or BS. This increases route discovery and maintenance to reestablish routes, as well as packet retransmission, resulting in higher cost (X.2) [
133]. Consequently, network performance degrades, which can be unacceptable in critical circumstances, such as during disaster relief and rescue operations [
104,
134]. Both high and low altitude platforms can be used. The high altitude platforms (e.g., balloons) provide a large coverage that can improve connectivity among nodes [
150,
151], hence improving the routing performance. The low altitude platforms (e.g., helikites [
152]) provide a small coverage that can improve local connectivity among nodes [
153]. Further investigation could be pursued to investigate how UAVs can collaborate with high and low altitude platforms to improve routing performance.
6.8. Reducing Energy Consumption Using Green Energy
UAVs are highly dynamic (X.1) in the three-dimensional space, and they may be spaced far apart, causing frequent link disconnection and network partitions that reduce route lifetime. Hence, high energy consumption is incurred to establish and select routes from time to time. Green energy-based mechanisms have been introduced to reduce energy consumption [
26]. It helps to keep the energy by reducing the number of exchange messages between UAVs. Further investigation could be pursued to investigate how UAVs can collaborate for energy harvesting. It provides the longer life of network and route by keeping UAVs alive. Solar panels can be used to harvest energy in order to minimize the drainage of power in UAVs. Addressing this open issue helps to achieve lower energy consumption (P.2) and high route setup rate (P.4).
7. Conclusions
This paper presents a review of the limited work on routing in flying ad hoc networks (FANETs), which possess unique characteristics (e.g., movement with high mobility degree in the three-dimensional space) that distinguish itself from the traditional mobile ad hoc networks and vehicular ad hoc networks. Routing in FANETs aims to achieve the objectives of enhancing route stability, network coverage, as well as routing performance and quality of service while addressing the challenges of high dynamicity, high cost, and low residual energy. Various routing metrics, such as mobility metrics, link expiration time, geographical location, and residual energy, are used to select routes; for instance, routes with higher link expiration time are selected. Due to the limited research done on routing in FANETs as well as the limited focus on the unique characteristics of FANETs, there remains a large amount of future work, and this paper has laid a solid foundation to motivate investigations of the open issues raised in this topic.





{kind=link}
{kind=link}
{kind=link}
{kind=link}