A Finger Grip Force Sensor with an Open-Pad Structure for Glove-Type Assistive Devices


Abstract
:1. Introduction
2. Materials and Methods
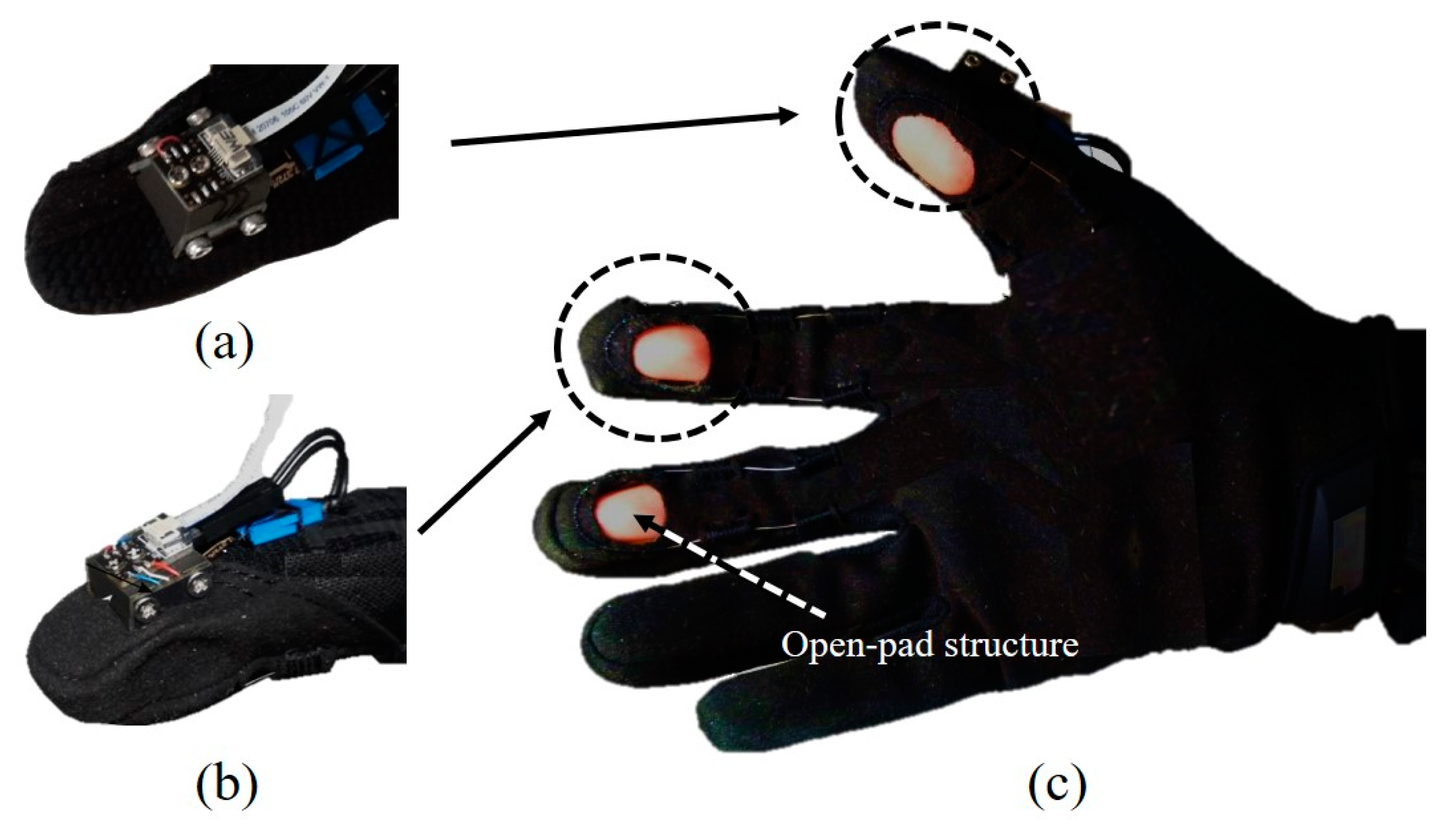
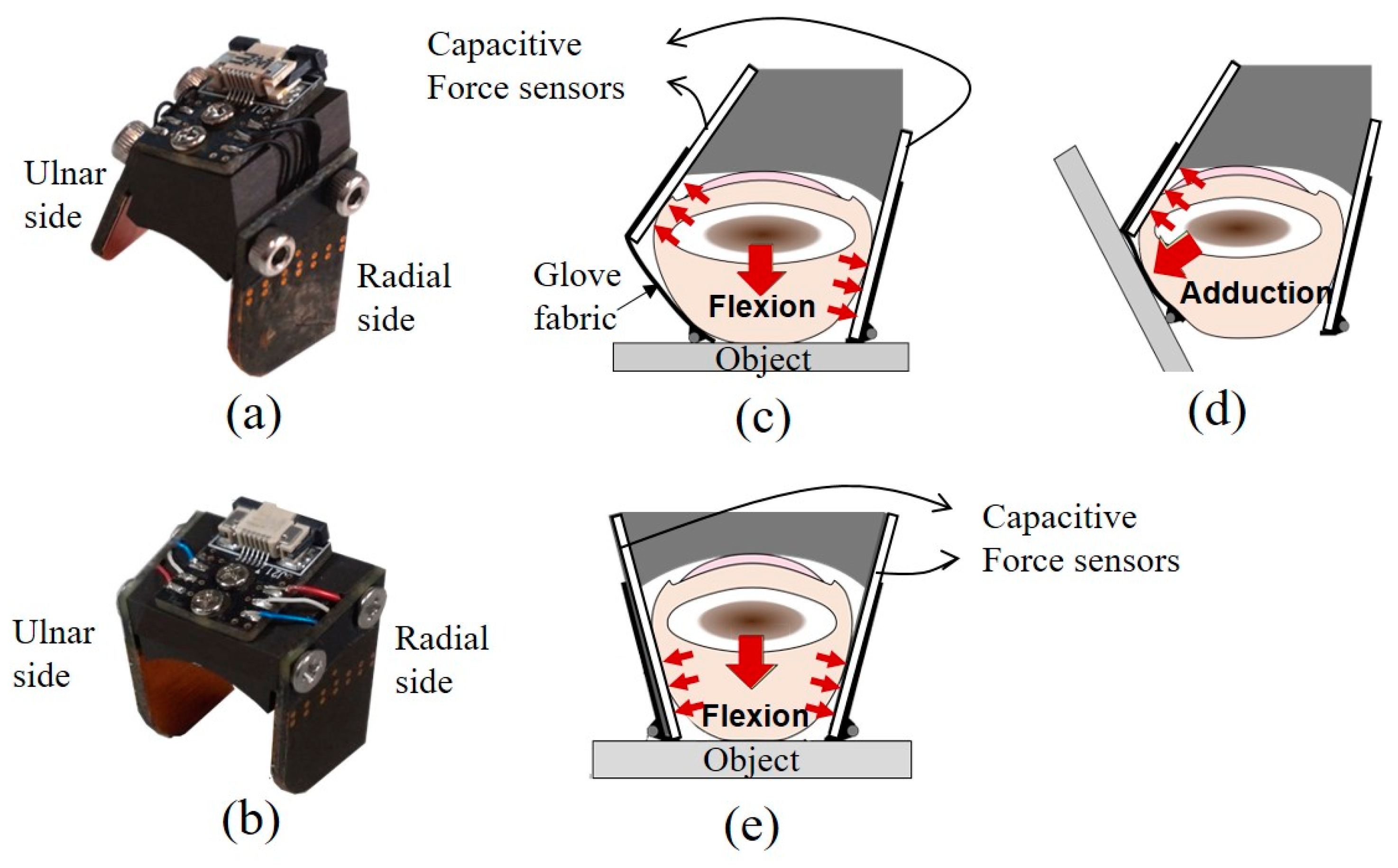
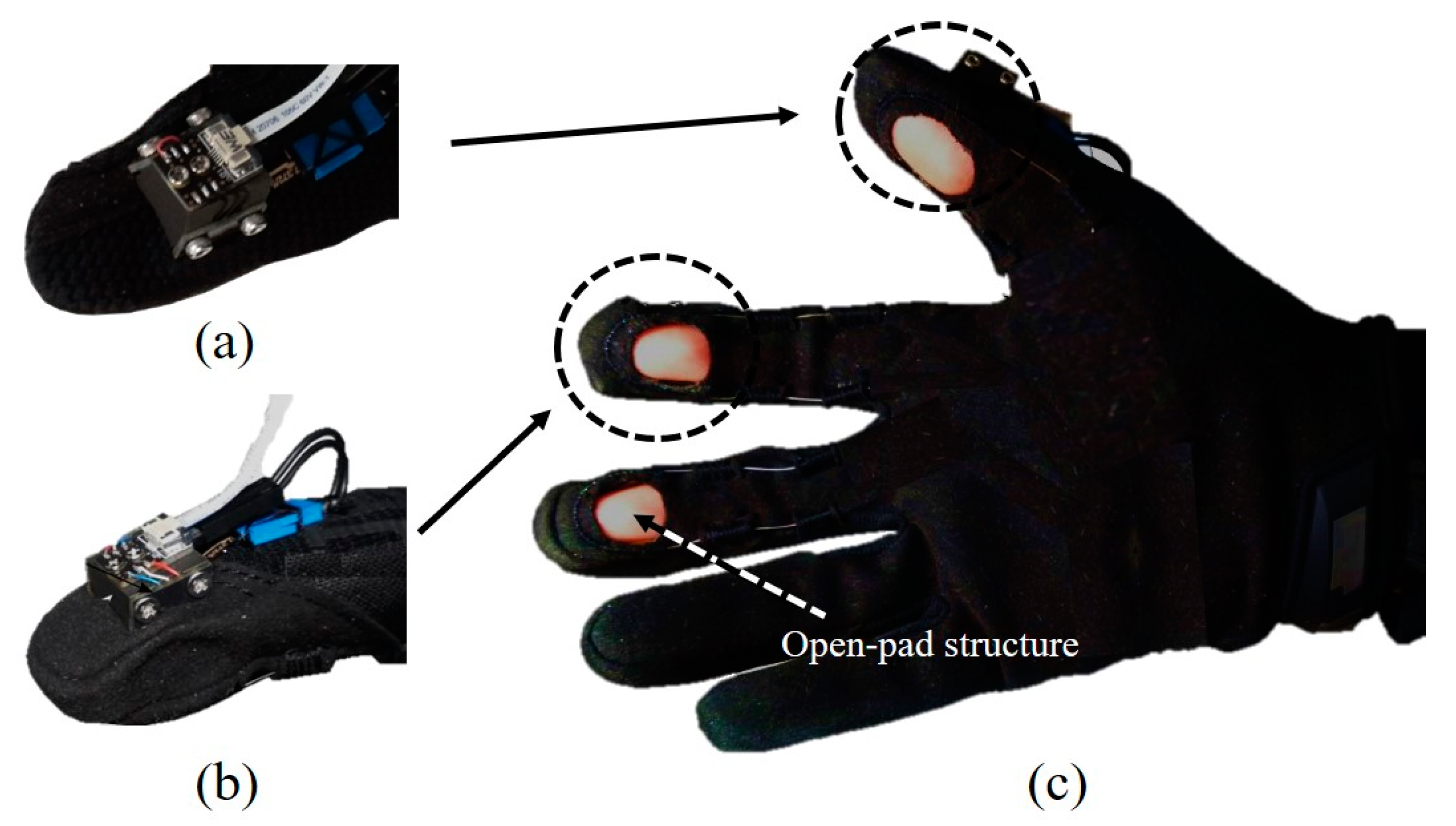
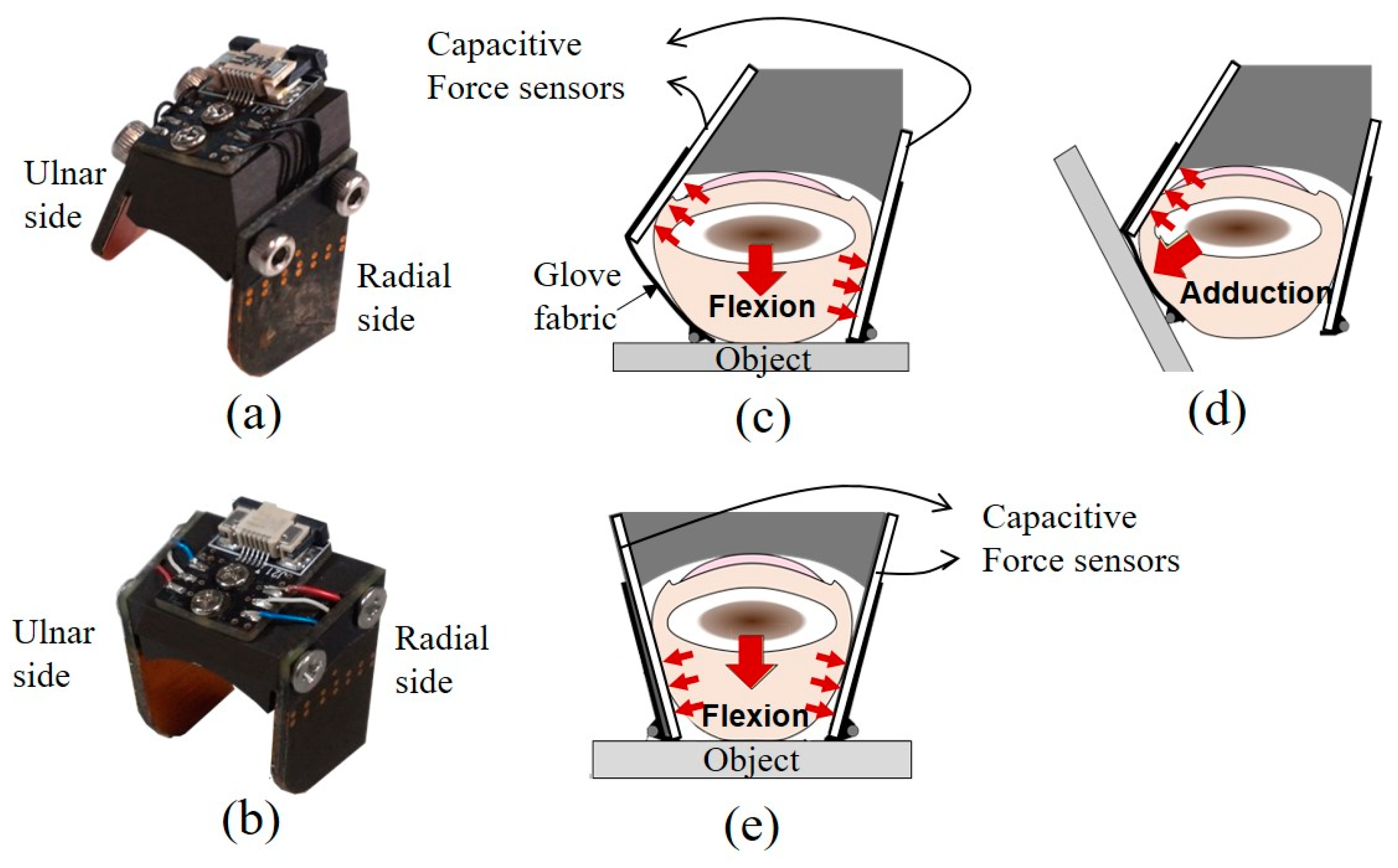
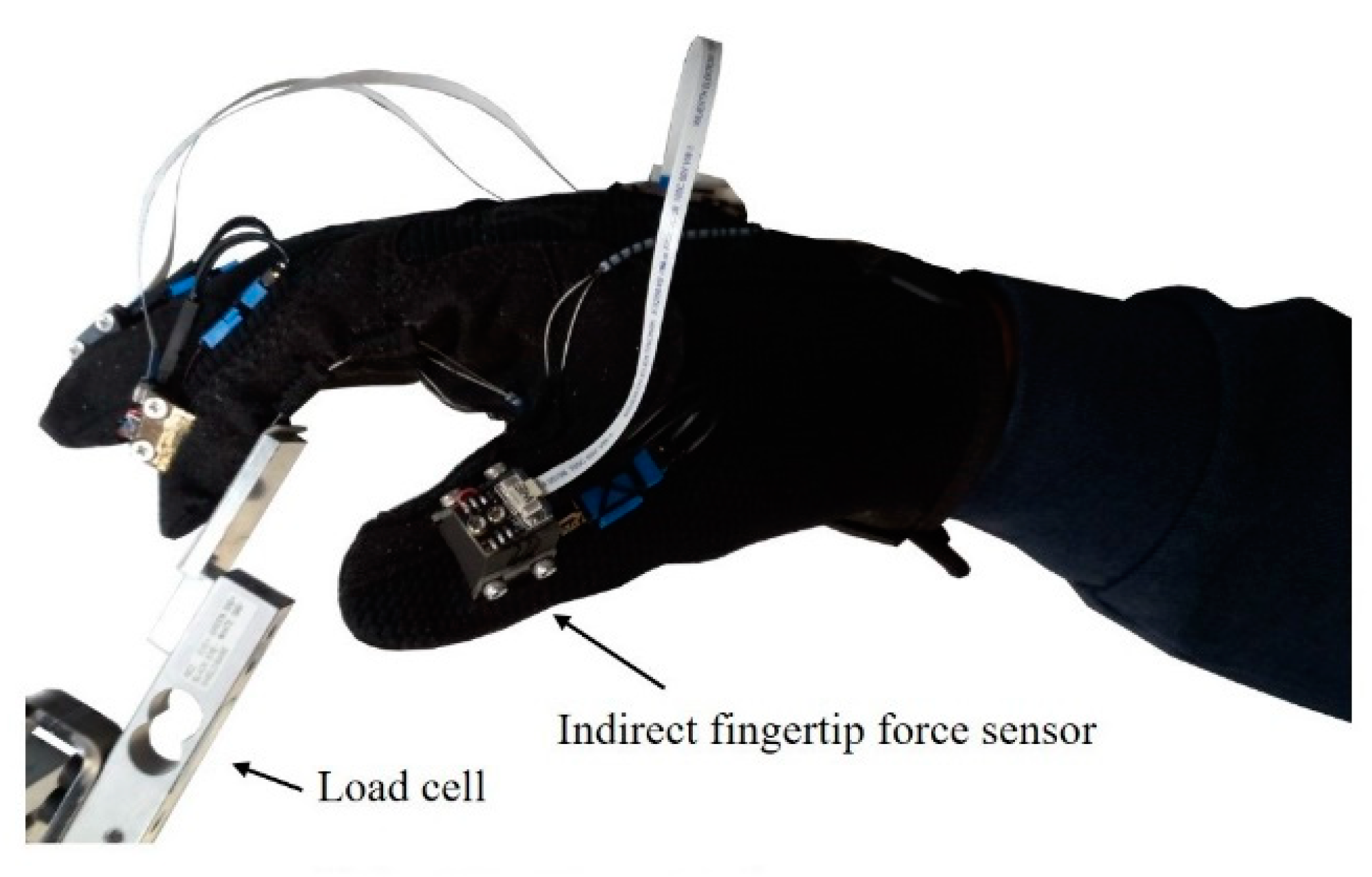
2.1. Design of the Fingertip Force Sensor
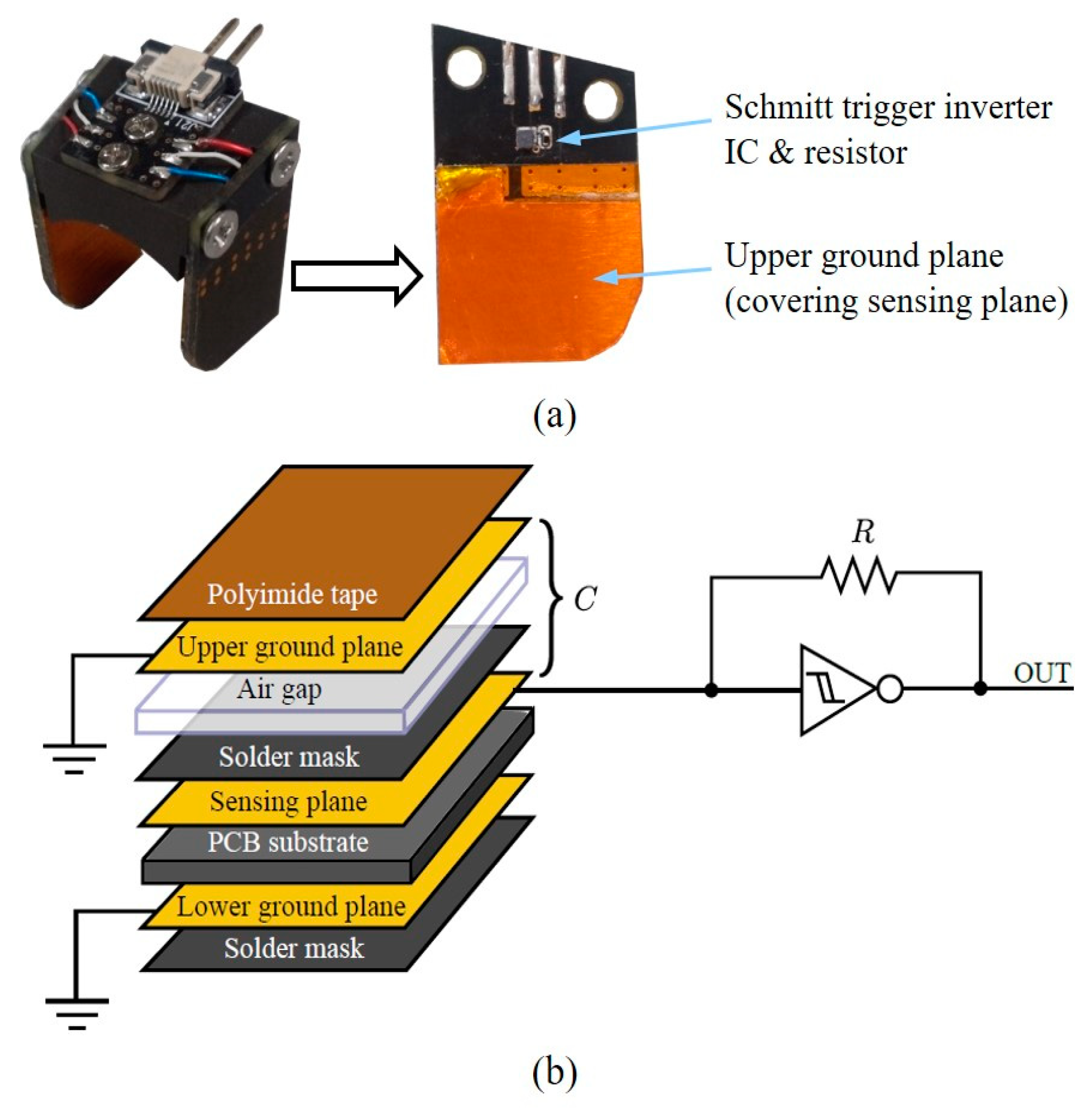
2.2. Capacitive Sensors
3. Results and Discussion
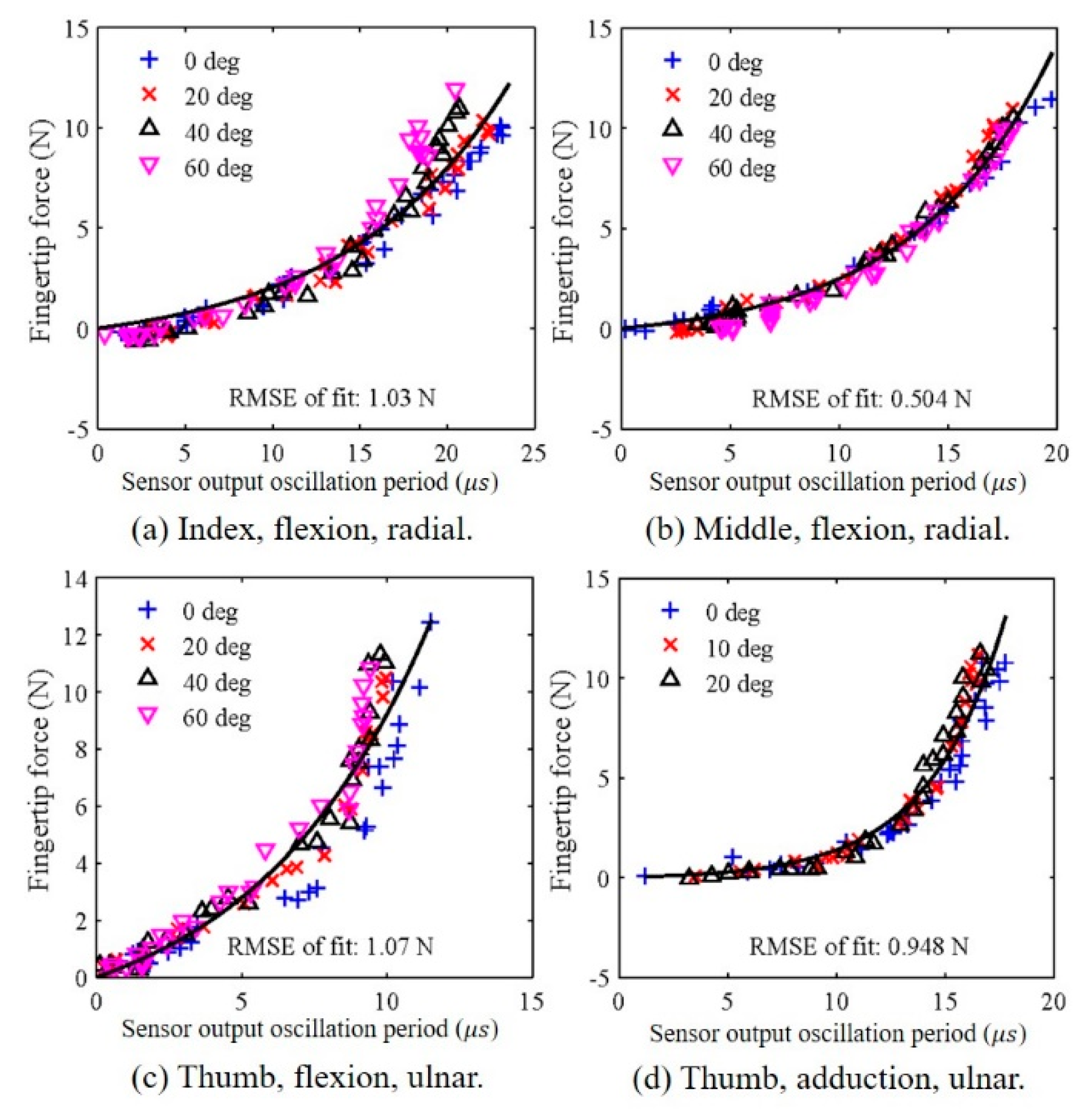
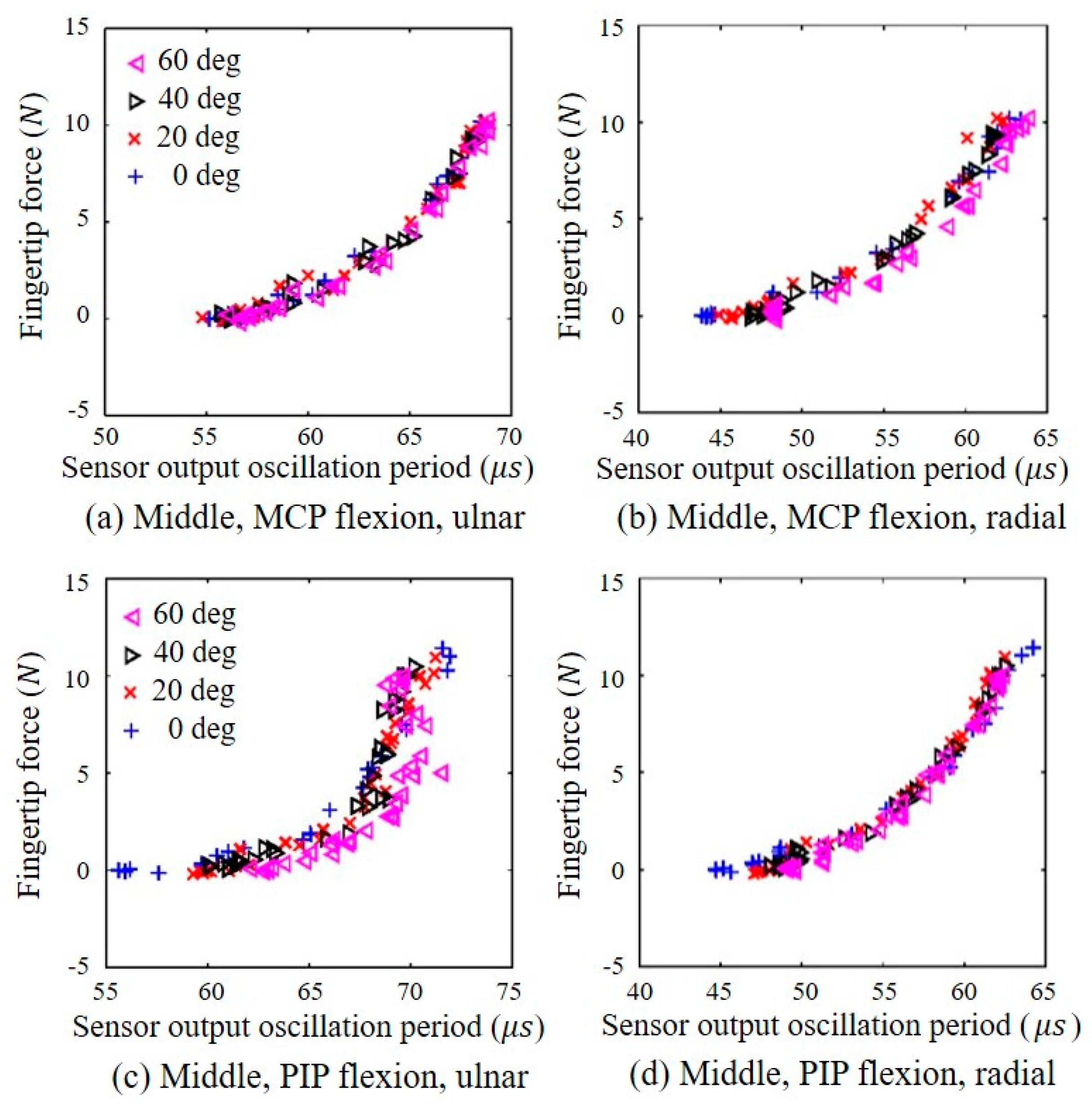
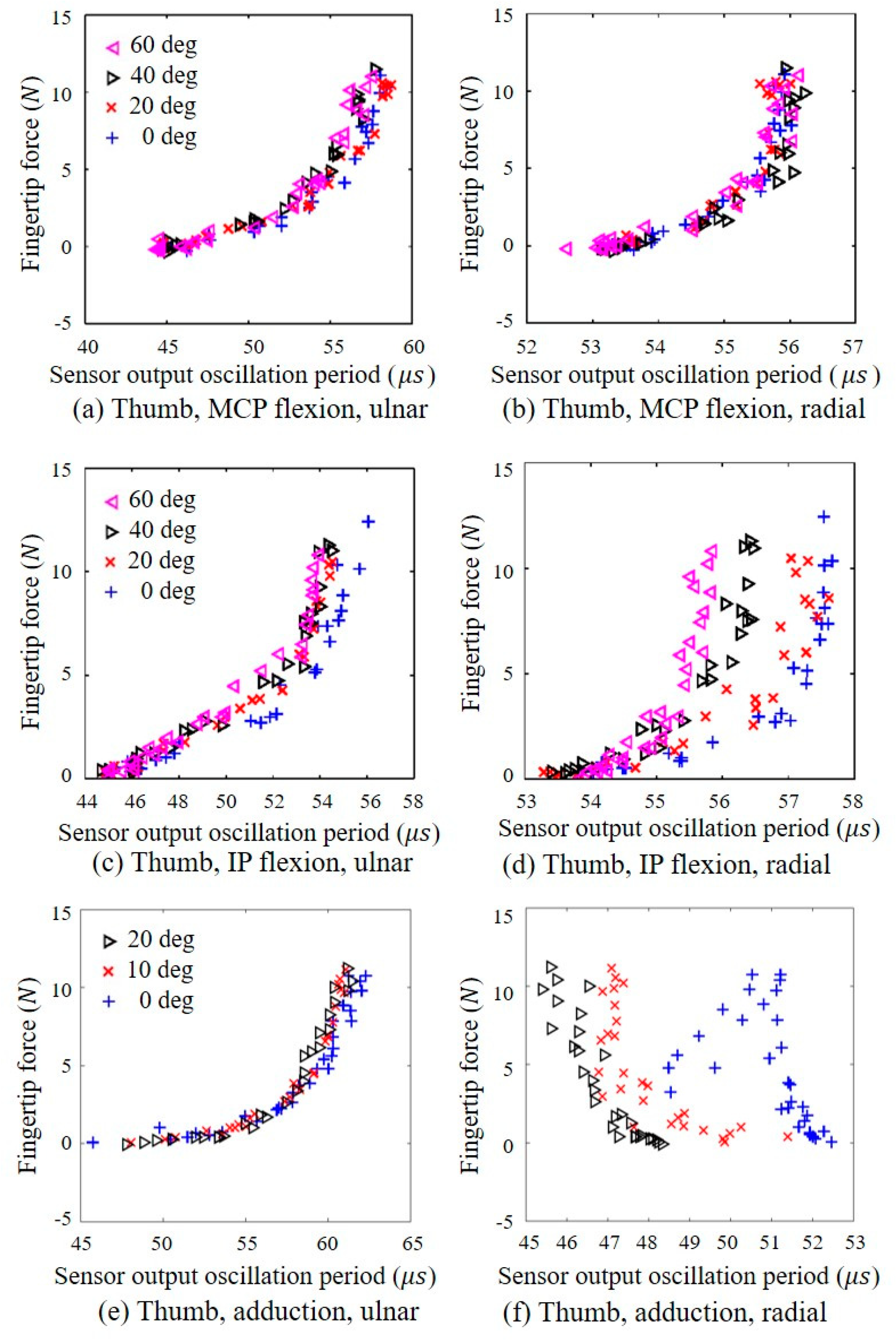
3.1. Effect of the Joint Angle on the Capacitive Sensor Output
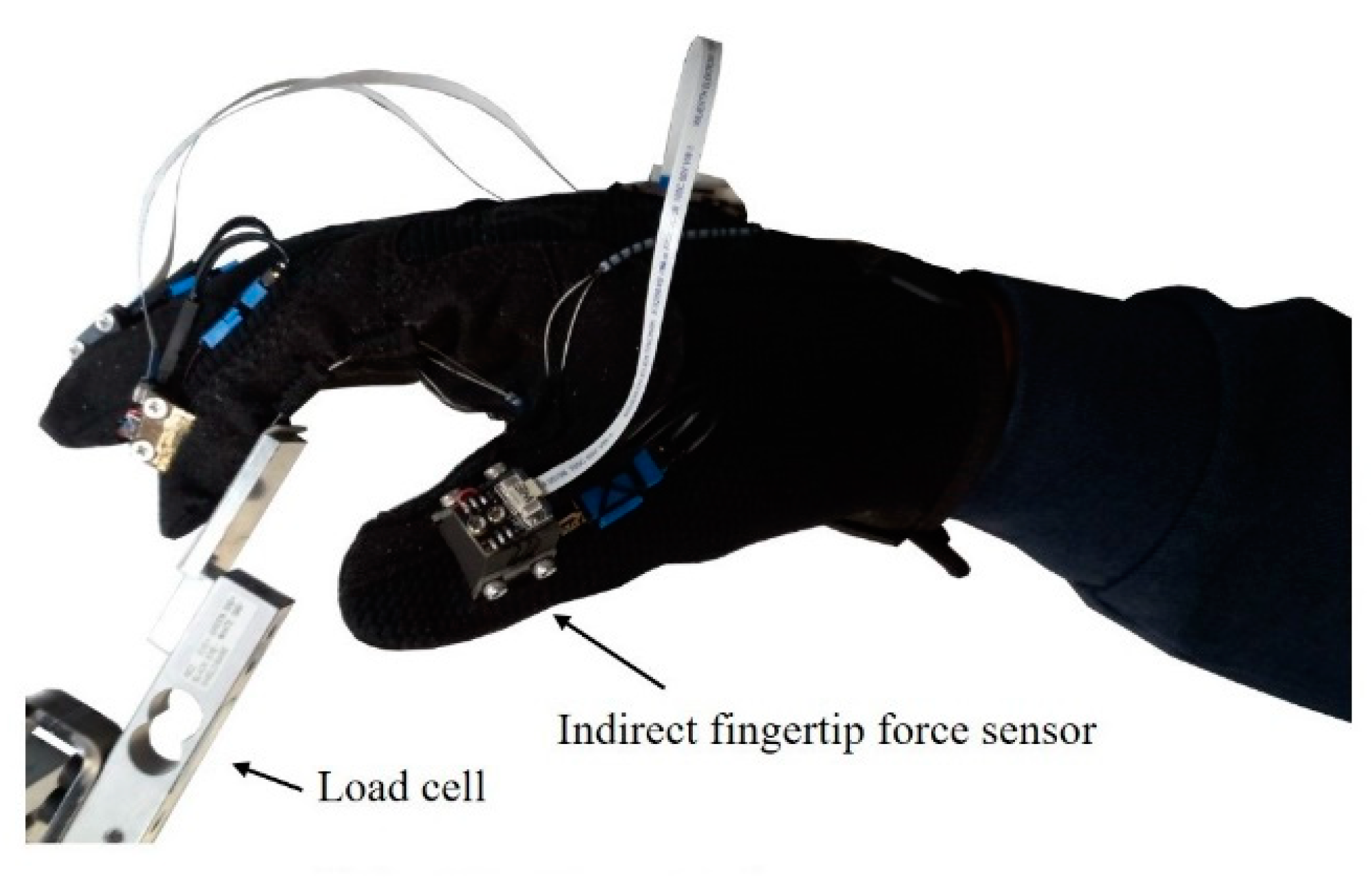
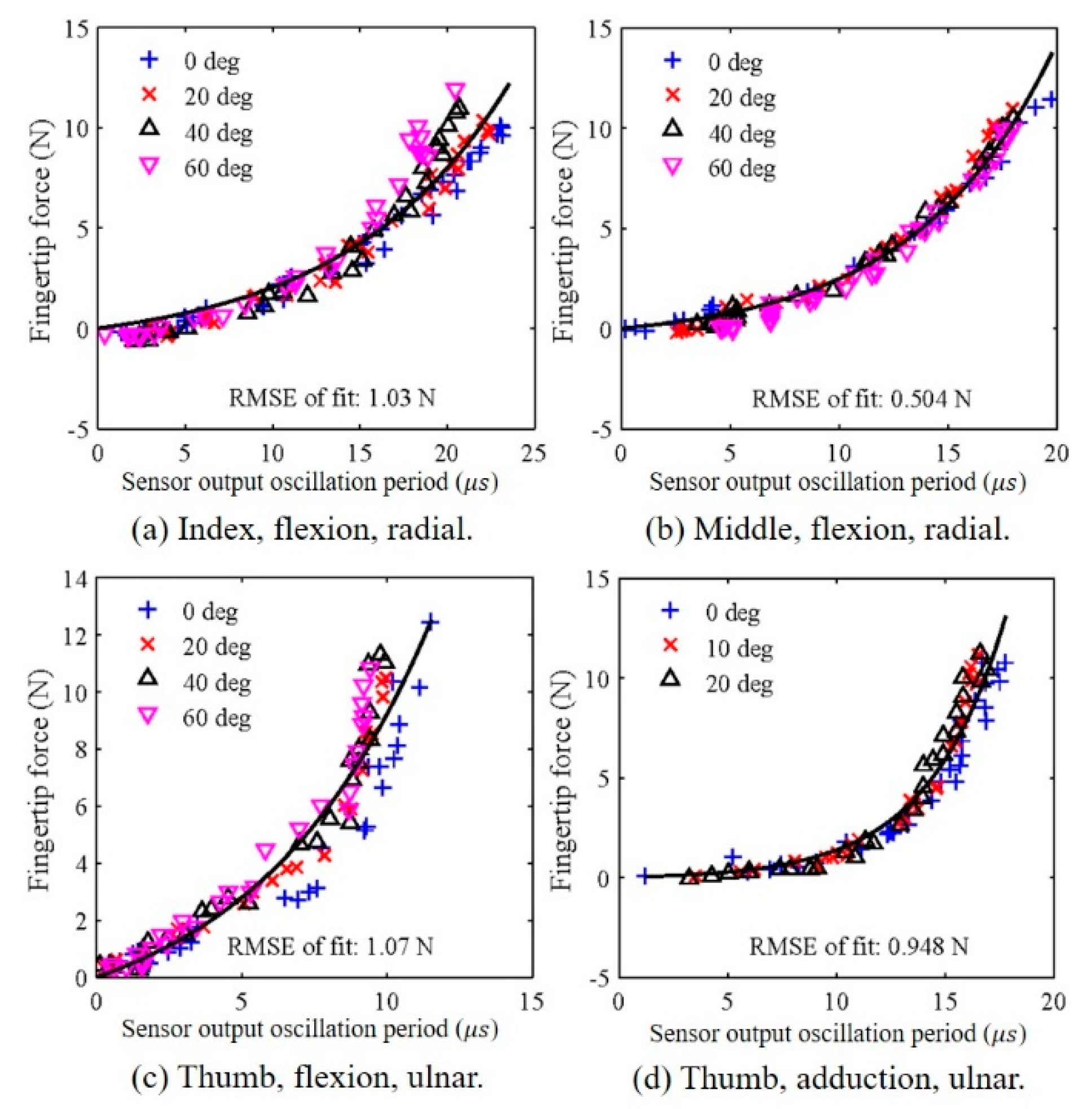
3.2. Calibration to the Fingertip Force
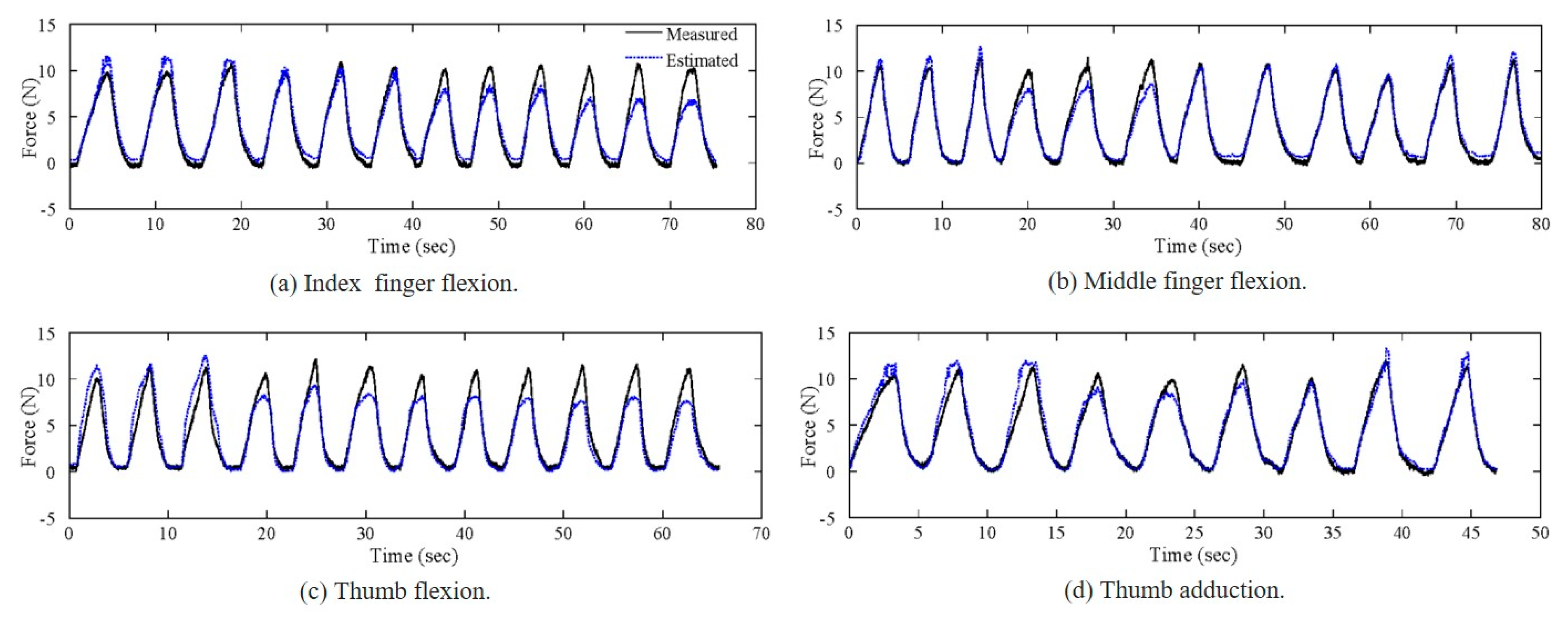
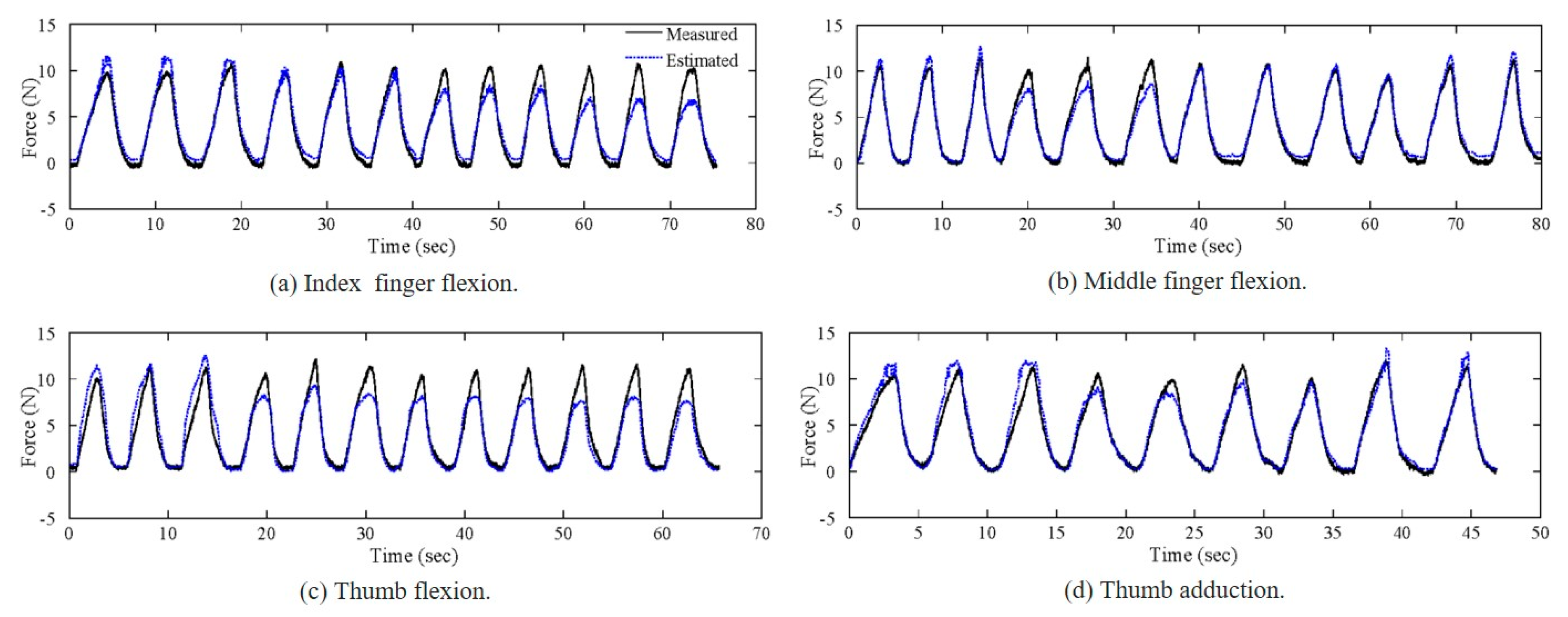
3.3. Accuracy of the Fingertip Force Measurement
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sayer, A.A.; Syddall, H.E.; Martin, H.J.; Dennison, E.M.; Roberts, H.C.; Cooper, C. Is grip strength associated with health-related quality of life? Findings from the Hertfordshire Cohort Study. Age Ageing 2006, 35, 409–415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sunderland, A.; Tinson, D.; Bradley, L.; Langton Hewer, R. Arm function after stroke: An evaluation of grip strength as a measure of recovery and a prognosic indicator. J. Neurol. Neurosurg. Psychiatry 1989, 52, 1267–1272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gellman, H.; Kan, D.; Gee, V.; Kuschner, S.H.; Botte, M.J. Analysis of pinch and grip strength after carpal tunnel release. J. Hand Surg. Am. 1989, 14, 863–864. [Google Scholar] [CrossRef]
- Frederiksen, H.; Hjelmborg, J.; Mortensen, J.; Mcgue, M.; Vaupel, J.W.; Christensen, K. Age trajectories of grip strength: cross-sectional and longitudinal data among 8,342 danes aged 46 to 102. Ann. Epidemiol. 2006, 16, 554–562. [Google Scholar] [CrossRef] [PubMed]
- Aszmann, O.C.; Roche, A.D.; Salminger, S.; Paternostro-Sluga, T.; Herceg, M.; Sturma, A.; Hofer, C.; Farina, D. Bionic reconstruction to restore hand function after brachial plexus injury: A case series of three patients. Lancet 2015, 385, 2183–2189. [Google Scholar] [CrossRef]
- Yun, Y.; Dancausse, S.; Esmatloo, P.; Serrato, A.; Deshpande, A.D. EMG-driven hand exoskeleton for spinal cord injury patients. IEEE Int. Conf. Robot. Autom. 2017, 2904–2910. [Google Scholar]
- Kroemer, K.H.E. Cumulative trauma Their recognition and measures to avoid them. Appl. Ergon. 1989, 20, 274–280. [Google Scholar] [CrossRef]
- Yun, S.-S.; Kang, B.B.; Cho, K.-J. Exo-glove PM: an easily customizable modularized pneumatic assistive glove. IEEE Robot. Autom. Lett. 2017, 2, 1725–1732. [Google Scholar] [CrossRef]
- Park, Y.; Jo, I.; Lee, J.; Bae, J. A dual-cable hand exoskeleton system for virtual reality. Mechatronics 2018, 49, 177–186. [Google Scholar] [CrossRef]
- Bianchi, M.; Cempini, M.; Conti, R.; Meli, E.; Ridolfi, A.; Vitiello, N.; Allotta, B. Design of a series elastic transmission for hand exoskeletons. Mechatronics 2018, 51, 8–18. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Rob. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Conti, R.; Meli, E.; Ridolfi, A. A novel kinematic architecture for portable hand exoskeletons. Mechatronics 2016, 35, 192–207. [Google Scholar] [CrossRef]
- Chiri, A.; Vitiello, N.; Giovacchini, F.; Roccella, S.; Vecchi, F.; Carrozza, M.C. Mechatronic design and characterization of the index finger module of a hand exoskeleton for post-stroke rehabilitation. IEEE/ASME Trans. Mechatron. 2012, 17, 884–894. [Google Scholar] [CrossRef]
- Kang, B.B.; Choi, H.; Lee, H.; Cho, K.J. Exo-glove poly II: a polymer-based soft wearable robot for the hand with a tendon-driven actuation system. Soft Robot. 2019, 6, 214–227. [Google Scholar] [CrossRef] [PubMed]
- Popov, D.; Gaponov, I.; Ryu, J.H. Portable exoskeleton glove with soft structure for hand assistance in activities of daily living. IEEE/ASME Trans. Mechatron. 2017, 22, 865–875. [Google Scholar] [CrossRef]
- Kim, B.; In, H.; Lee, D.Y.; Cho, K.J. Development and assessment of a hand assist device: GRIPIT. J. Neuroeng. Rehabil. 2017, 14, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Radder, B.; Prange-Lasonder, G.B.; Kottink, A.I.R.; Holmberg, J.; Sletta, K.; van Dijk, M.; Meyer, T.; Melendez-Calderon, A.; Buurke, J.H.; Rietman, J.S. Home rehabilitation supported by a wearable soft-robotic device for improving hand function in older adults: a pilot randomized controlled trial. PLoS ONE 2019, 14, e0220544. [Google Scholar] [CrossRef]
- Diftler, M.A.; Ihrke, C.A.; Bridgwater, L.B.; Davis, D.R.; Linn, D.M.; Laske, E.A.; Lee, J.H.; Motors, G. RoboGlove—A robonaut derived multipurpose assistive device. Int. Conf. Robot. Autom. 2014, 78–84. [Google Scholar]
- Nilsson, M.; Ingvast, J.; Wikander, J.; von Holst, H. The soft extra muscle system for improving the grasping capability in neurological rehabilitation. IEEE-EMBS Conf. Biomed. Eng. Sci. 2012, 2012, 412–417. [Google Scholar]
- Tadano, K.; Akai, M.; Kadota, K.; Kawashima, K. Development of grip amplified glove using bi-articular mechanism with pneumatic artificial rubber muscle. IEEE Int. Conf. Robot. Autom. 2010, 2010, 2363–2368. [Google Scholar]
- Yamada, Y.; Morizono, T.; Sato, S.; Shimohira, T.; Umetani, Y.; Yoshida, T.; Aoki, S. Proposal of a SkilMate finger for EVA gloves. IEEE Int. Conf. Robot. Autom. 2001, 2, 1406–1412. [Google Scholar]
- Takagi, M.; Iwata, K.; Takahashi, Y.; Yamamoto, S.; Koyama, H.; Komeda, T. Development of a grip aid system using air cylinders. IEEE Int. Conf. Robot. Autom. 2009, 2009, 2312–2317. [Google Scholar]
- Sarac, M.; Solazzi, M.; Otaduy, M.A.; Frisoli, A. Rendering strategies for underactuated hand exoskeletons. IEEE Robot. Autom. Lett. 2018, 3, 2087–2092. [Google Scholar] [CrossRef]
- Agarwal, P.; Deshpande, A.D. Impedance and force-field control of the index finger module of a hand exoskeleton for rehabilitation. IEEE Int. Conf. Rehabil. Robot. 2015, 2015, 85–90. [Google Scholar]
- Zhao, H.; Jalving, J.; Huang, R.; Knepper, R.; Ruina, A.; Shepherd, R. A helping hand: Soft orthosis with integrated optical strain sensors and EMG control. IEEE Robot. Autom. Mag. 2016, 23, 55–64. [Google Scholar] [CrossRef]
- Leonardis, D.; Barsotti, M.; Loconsole, C.; Solazzi, M.; Troncossi, M.; Mazzotti, C.; Castelli, V.P.; Procopio, C.; Lamola, G.; Chisari, C.; et al. An EMG-controlled robotic hand exoskeleton for bilateral rehabilitation. IEEE Trans. Haptics 2015, 8, 140–151. [Google Scholar] [CrossRef]
- Thielbar, K.O.; Triandafilou, K.M.; Fischer, H.C.; O’Toole, J.M.; Corrigan, M.L.; Ochoa, J.M.; Stoykov, M.E.; Kamper, D.G. Benefits of using a voice and EMG-driven actuated glove to support occupational therapy for stroke survivors. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 297–306. [Google Scholar] [CrossRef]
- Park, S.; Meeker, C.; Weber, L.M.; Bishop, L.; Stein, J.; Ciocarlie, M. Multimodal sensing and interaction for a robotic hand orthosis. IEEE Robot. Autom. Lett. 2019, 4, 315–322. [Google Scholar] [CrossRef] [Green Version]
- Kinoshita, H. Effect of gloves on prehensile forces during lifting and holding tasks. Ergonomics 1999, 42, 1372–1385. [Google Scholar] [CrossRef]
- Romano, J.M.; Gray, S.R.; Jacobs, N.T.; Kuchenbecker, K.J. Toward tactilely transparent gloves: Collocated slip sensing and vibrotactile actuation. In Proceedings of the World Haptics 2009: Third Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Washington, DC, USA, 18–20 March 2009; pp. 279–284. [Google Scholar]
- Nowak, D.A.; Hermsdörfer, J.; Glasauer, S.; Philipp, J.; Meyer, L.; Mai, N. The effects of digital anaesthesia on predictive grip force adjustments during vertical movements of a grasped object. Eur. J. Neurosci. 2002, 14, 756–762. [Google Scholar] [CrossRef]
- Nowak, D.A.; Glasauer, S.; Hermsdörfer, J. How predictive is grip force control in the complete absence of somatosensory feedback? Brain 2004, 127, 182–192. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Monzee, J.; Lamarre, Y.; Smith, A.M. The effects of digital anesthesia on force control using a precision grip. J. Neurophysiol. 2003, 89, 672–683. [Google Scholar] [CrossRef] [PubMed]
- Ronsse, R.; Vitiello, N.; Lenzi, T.; Van Den Kieboom, J.; Carrozza, M.C.; Ijspeert, A.J. Human-robot synchrony: Flexible assistance using adaptive oscillators. IEEE Trans. Biomed. Eng. 2011, 58, 1001–1012. [Google Scholar] [CrossRef] [PubMed]
- Huigen, E.; Peper, A.; Grimbergen, C.A. Investigation into the origin of the noise of surface electrodes. Med. Biol. Eng. Comput. 2002, 40, 332–338. [Google Scholar] [CrossRef]
- Kamavuako, E.N.; Englehart, K.B.; Jensen, W.; Farina, D. Simultaneous and proportional force estimation in multiple degrees of freedom from intramuscular EMG. IEEE Trans. Biomed. Eng. 2012, 59, 1804–1807. [Google Scholar] [CrossRef]
- Mascaro, S.A.; Harry Asada, H. Photoplethysmograph fingernail sensors for measuring finger forces without haptic obstruction. IEEE Trans. Robot. Autom. 2001, 17, 698–708. [Google Scholar] [CrossRef] [Green Version]
- Mascaro, S.A.; Asada, H.H. Measurement of finger posture and three-axis fingertip touch force using fingernail sensors. IEEE Trans. Robot. Autom. 2004, 20, 26–35. [Google Scholar] [CrossRef]
- Kao, H.L.; Dementyev, A.; Paradiso, J.A.; Schmandt, C. NailO: Fingernails as an input surface. Conf. Hum. Factors Comput. Syst. 2015, 3015–3018. [Google Scholar]
- Nakatani, M.; Shiojima, K.; Kinoshita, S.; Kawasoe, T.; Koketsu, K.; Wada, J. Wearable contact force sensor system based on fingerpad deformation. In Proceedings of the IEEE World Haptics Conference, Istanbul, Turkey, 21–24 June 2011; pp. 323–328. [Google Scholar]
- Saito, A.; Kuno, W.; Kawai, W.; Miyata, N.; Sugiura, Y. Estimation of fingertip contact force by measuring skin deformation and posture with photo-reflective sensors. Augment. Hum. Int. Conf. 2019. [Google Scholar]
- Ogata, M.; Sugiura, Y.; Osawa, H.; Imai, M. iRing: intelligent ring using infrared reflection. Proc. ACM Symp. User Interface Softw. Technol. 2012, 131–136. [Google Scholar]
- Su, C.H.; Chan, L.; Weng, C.T.; Liang, R.H.; Cheng, K.Y.; Chen, B.Y. NailDisplay: bringing an always-available visual display to fingertips. Conf. Hum. Factors Comput. Syst. 2013, 1461–1464. [Google Scholar]
- Chan, L.; Liang, R.H.; Tsai, M.C.; Cheng, K.Y.; Su, C.H.; Chen, M.Y.; Cheng, W.H.; Chen, B.Y. FingerPad: private and subtle interaction using fingertips. Annu. ACM Symp. User Interface Softw. Technol. 2013, 2013, 255–260. [Google Scholar]
- Heo, P.; Kim, J. Power-assistive finger exoskeleton with a palmar opening at the fingerpad. IEEE Trans. Biomed. Eng. 2014, 61, 2688–2697. [Google Scholar] [CrossRef] [PubMed]
- Radwin, R.G.; Oh, S.; Jensen, T.R.; Webster, J.G. External finger forces in submaximal five-finger static pinch prehension. Ergonomics 1992, 35, 275–288. [Google Scholar] [CrossRef]
- Kong, Y.K.; Lee, K.S.; Kim, D.M.; Jung, M.C. Individual finger contribution in submaximal voluntary contraction of gripping. Ergonomics 2011, 54, 1072–1080. [Google Scholar] [CrossRef]
- Rosen, J.; Hannaford, B.; Richard, R.M.; Satava, M. Surgical Robotics: Systems Applications and Visions; Springer: New York, NY, USA, 2011. [Google Scholar]
- Aukes, D.M.; Heyneman, B.; Ulmen, J.; Stuart, H.; Cutkosky, M.R.; Kim, S.; Garcia, P.; Edsinger, A. Design and testing of a selectively compliant underactuated hand. Int. J. Rob. Res. 2014, 33, 721–735. [Google Scholar] [CrossRef]
- Ulmen, J.; Cutkosky, M. A robust, low-cost and low-noise artificial skin for human-friendly robots. Proc. IEEE Int. Conf. Robot. Autom. 2010, 2010, 4836–4841. [Google Scholar]
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The GRASP taxonomy of human grasp types. IEEE Trans. Hum.-Mach Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Posture | MCP Flexion | PIP/IP Flexion | Adduction |
|---|---|---|---|
| Index, MCP flexion | 0, 20, 40, 60 | 15 | 0 |
| Middle, MCP flexion | 0, 20, 40, 60 | 15 | 0 |
| Thumb, MCP flexion | 30, 50, 70, 90 | 10 | 0 |
| Index, PIP flexion | 15 | 0, 20, 40, 60 | 0 |
| Middle, PIP flexion | 15 | 0, 20, 40, 60 | 0 |
| Thumb, IP flexion | 10 | 0, 20, 40, 60 | 0 |
| Thumb, adduction | 90 | 10 | 0, 10, 20 |
| Finger, Direction | a | b | Goodness of Fit (RMSE, in N) |
|---|---|---|---|
| Index, flexion | 1.055 | 0.1074 | 1.0335 |
| Middle, flexion | 0.6605 | 0.156 | 0.5043 |
| Thumb, flexion | 2.129 | 0.1673 | 1.0695 |
| Thumb, adduction | 0.08567 | 0.2835 | 0.9478 |
| Finger, Direction | Joint Angle (°) | Estimation Error (RMSE, in N) |
|---|---|---|
| Index, flexion | PIP: 0 | 0.876 |
| PIP: 20 | 0.689 | |
| PIP: 40 | 1.123 | |
| PIP: 60 | 1.639 | |
| Overall | 1.123 | |
| Middle, flexion | PIP: 0 | 0.507 |
| PIP: 20 | 1.093 | |
| PIP: 40 | 0.449 | |
| PIP: 60 | 0.615 | |
| Overall | 0.716 | |
| Thumb, flexion | IP: 0 | 1.571 |
| IP: 20 | 1.030 | |
| IP: 40 | 1.002 | |
| IP: 60 | 1.453 | |
| Overall | 1.290 | |
| Thumb, adduction | 0 | 1.209 |
| 10 | 0.703 | |
| 20 | 0.552 | |
| Overall | 0.868 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Heo, P.; Kim, J.; Na, Y. A Finger Grip Force Sensor with an Open-Pad Structure for Glove-Type Assistive Devices. Sensors 2020, 20, 4. https://doi.org/10.3390/s20010004
Park J, Heo P, Kim J, Na Y. A Finger Grip Force Sensor with an Open-Pad Structure for Glove-Type Assistive Devices. Sensors. 2020; 20(1):4. https://doi.org/10.3390/s20010004
Chicago/Turabian StylePark, Junghoon, Pilwon Heo, Jung Kim, and Youngjin Na. 2020. "A Finger Grip Force Sensor with an Open-Pad Structure for Glove-Type Assistive Devices" Sensors 20, no. 1: 4. https://doi.org/10.3390/s20010004