An Iterative Deconvolution-Time Reversal Method with Noise Reduction, a High Resolution and Sidelobe Suppression for Active Sonar in Shallow Water Environments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Iterative Deconvolution-Time Reversal (ID-TR) Method
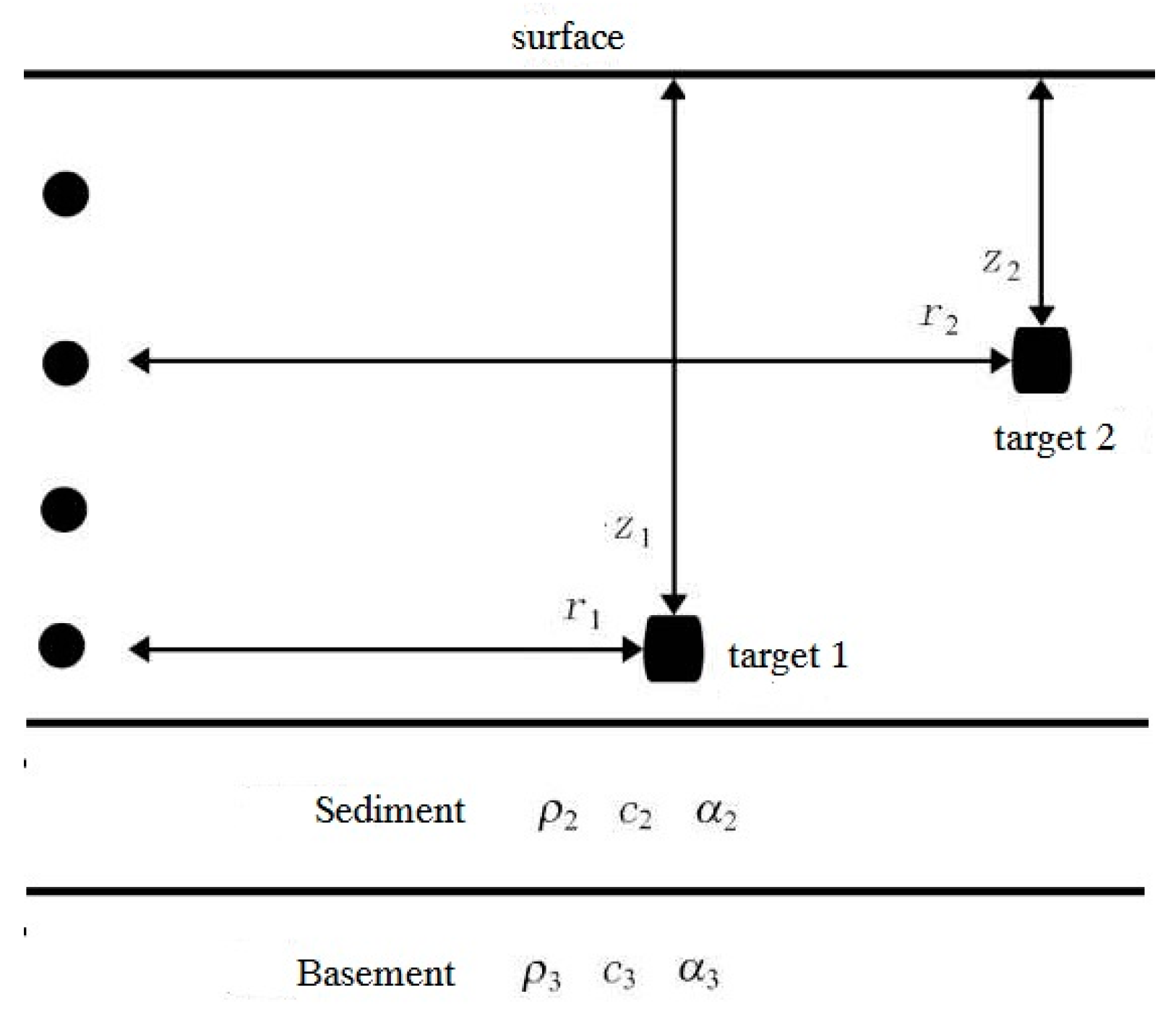
2.1. Modeling of the Received Signal
2.2. Matched Filter
2.3. Convolution Model of Wideband Cross-Ambiguity Function
2.4. Iterative Deconvolution-Time Reversal Method
3. Simulation Results
3.1. The Resolution of the ID-TR Filter
3.1.1. The Case in Free Field Environments
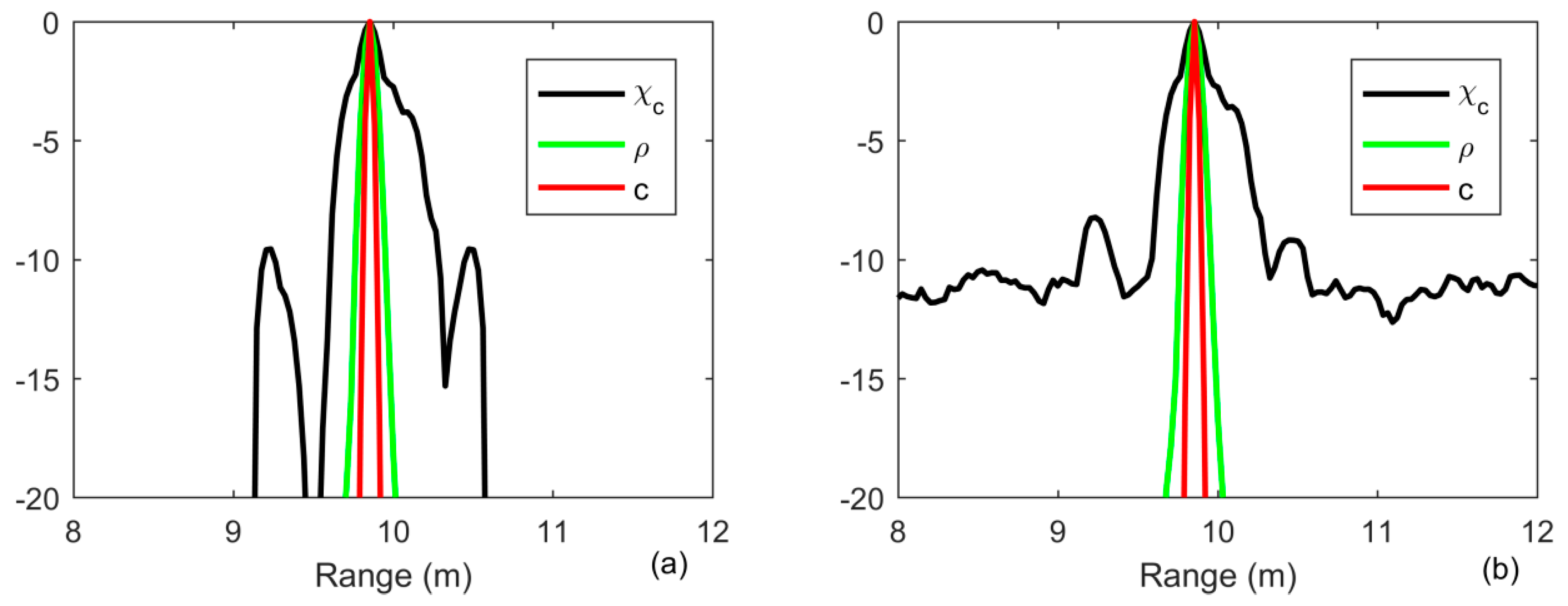
3.1.2. The Case in Waveguide Environments
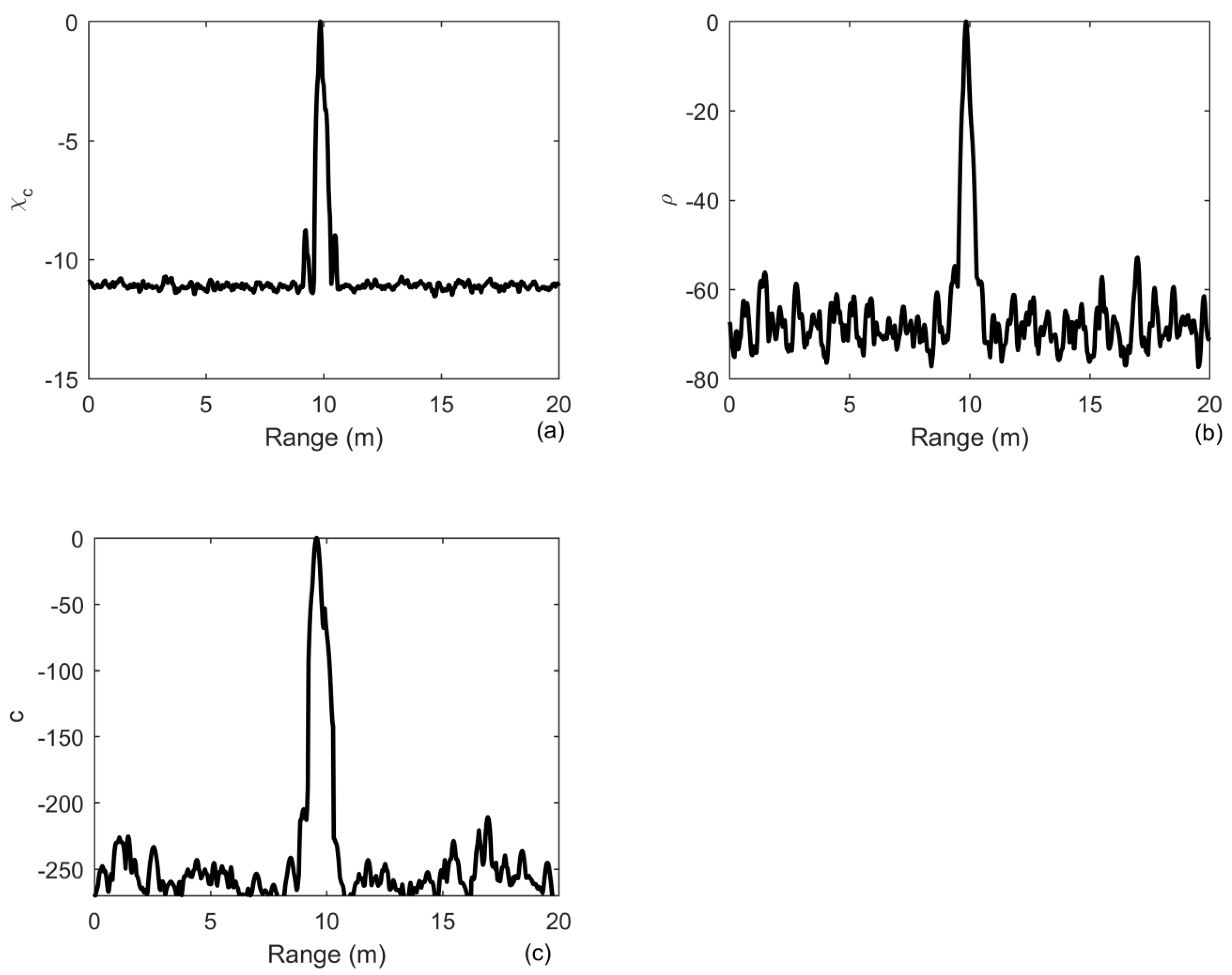
3.2. Targets Under Noise-Limited Condition
3.2.1. The Case in Free Field Environments
3.2.2. The Case in Waveguide Environments
4. Experimental Results
4.1. The Case of an Extended Target
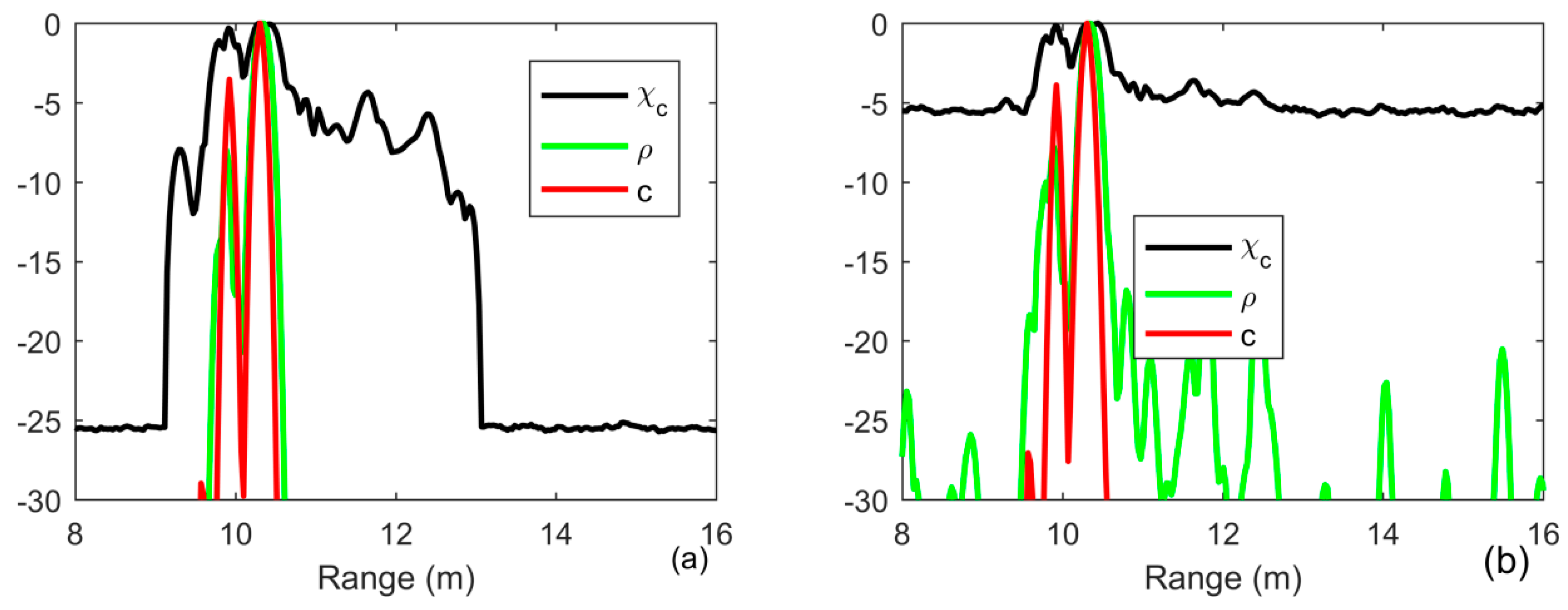
4.2. The Case of Ideally Resolved and Extended Targets
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| r(t) | received signal |
| s(t) | transmitted signal |
| n(t) | noise |
| hf(t) | spread function of forward propagation channel |
| hb(t) | spread function of backward propagation channel |
| h(t) | spread function of channel |
| c(t) | reflectivity density function of the target |
| ρ(t) | generalized reflectivity density function of the target |
| auto-ambiguity function | |
| cross-ambiguity function | |
| auto-ambiguity function with α = 1 | |
| cross-ambiguity function with α = 1 | |
| α | Doppler |
| τ,v | time-delay |
| t | time variable |
| f | frequency variable |
| M | the number of targets |
| K | the number of paths |
| R | the number of iterations |
References
- Carmillet, V.; Amblard, P.O.; Jourdain, G. Detection of phase- or frequency-modulated signals in reverberation noise. J. Acoust. Soc. Am. 1999, 105, 3375–3389. [Google Scholar] [CrossRef]
- Ricker, D.W.; Cutezo, A.J. Estimation of coherent detection performance for spread scattering in reverberation-noise mixtures. J. Acoust. Soc. Am. 1999, 107, 1978–1986. [Google Scholar] [CrossRef] [PubMed]
- Allen, W.B.; Westerfield, E.C. Digital compressed-time correlators and matched filters for active sonar. J. Acoust. Soc. Am. 1964, 36, 121–139. [Google Scholar] [CrossRef]
- Jiang, X.; Zeng, W.J.; Li, X.L. Time delay and Doppler estimation for wideband acoustic signals in multipath environments. J. Acoust. Soc. Am. 2011, 130, 850–857. [Google Scholar] [CrossRef]
- Yang, Y.; Blum, R.S. Minimax Robust MIMO Radar Waveform Design. IEEE J. Sel. Top. Signal Process. 2007, 1, 147–155. [Google Scholar] [CrossRef]
- Li, J.; Xu, L.; Petre, S.; Keith, W.F.; Daniel, W.B. Range compression and waveform optimization for MIMO radar: A Cramér-Rao bound based study. IEEE Trans. Signal Process. 2008, 56, 218–232. [Google Scholar]
- Liu, X.; Sun, C.; Yang, Y.; Zhuo, J. Low sidelobe range profile synthesis for sonar imaging using stepped-frequency pulses. IEEE Geosci. Remote Sens. Lett. 2017, 14, 218–221. [Google Scholar] [CrossRef]
- Zou, J.; Yang, R.; Luo, S.; Zhou, Y. Range sidelobe suppression for OFDMintegrated radar and communication signal. J. Eng. 2019, 2019, 7624–7627. [Google Scholar]
- Dong, Y. Implementable phase-coded radar waveforms featuring extra-low range sidelobes and Doppler resilience. IET Radar Sonar Navig. 2019, 13, 1530–1539. [Google Scholar] [CrossRef]
- Hua, G.; Abeysekera, S.S. Receiver Design for Range and Doppler Sidelobe Suppression Using MIMO and Phased-Array Radar. IEEE Trans. Signal Process. 2013, 61, 1315–1326. [Google Scholar] [CrossRef]
- Zhou, S.H.; Liu, H.W.; Wang, X.; Cao, Y. MIMO Radar Range-Angular-Doppler Sidelobe Suppression Using Random Space-Time Coding. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2047–2060. [Google Scholar] [CrossRef]
- Berestesky, P.; Attia, E.H. Sidelobe leakage reduction in random phase diversity radar using coherent CLEAN. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2426–2435. [Google Scholar] [CrossRef]
- An, Q.; Hoorfar, A.; Zhang, W.J.; Li, S.Y.; Wang, J.Q. Range coherence factor for down range sidelobes suppression in radar imaging through multilayered dielectric media. IEEE Access 2019, 7, 66910–66918. [Google Scholar] [CrossRef]
- Li, S.; Amin, M.; An, Q.; Zhao, G.; Sun, H. 2-D Coherence Factor for Sidelobe and Ghost Suppressions in Radar Imaging. IEEE Trans. Antennas Propag. 2020, 68, 1204–1209. [Google Scholar] [CrossRef] [Green Version]
- Yazici, B.; Xie, G. Wideband extended range-doppler imaging and waveform design in the presence of clutter and noise. IEEE Trans. Inform. Theory 2006, 52, 4563–4580. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Ma, F.; Lim, E.; Cheng, E.; White, L.B. Rational-orthogonal-wavelet-based active sonar pulse and detector design. IEEE J. Ocean. Eng. 2019, 44, 167–178. [Google Scholar] [CrossRef]
- Tan, D.; Li, L.; Yin, Z.; Li, D.; Zhu, Y.; Zheng, S. Ekman boundary layer mass transfer mechanism of free sink vortex. Int. J. Heat Mass Transf. 2020, 150, 119250. [Google Scholar] [CrossRef]
- Li, L.; Lu, J.; Fang, H.; Yin, Z.; Wang, T.; Wang, R.; Fan, X.; Zhao, L.; Tan, D.; Wan, Y. Lattice Boltzmann method for fluid-thermal systems: Status, hotspots, trends and outlook. IEEE Access 2020, 8, 27649–27675. [Google Scholar] [CrossRef]
- Yang, T.C.; Schindall, J.; Huang, C.F.; Liu, J.Y. Clutter reduction using Doppler sonar in a harbor environment. J. Acoust. Soc. Am. 2012, 132, 3053–3067. [Google Scholar] [CrossRef]
- Yu, G.; Yang, T.C.; Piao, S. Estimating the delay-Doppler of target echo in a high clutter underwater environment using wideband linear chirp signals: Evaluation of performance with experimental data. J. Acoust. Soc. Am. 2017, 142, 2047–2057. [Google Scholar] [CrossRef]
- Dalitz, C.; Pohle-Fröhlich, R.; Michalk, T. Point spread functions and deconvolution of ultrasonic images. IEEE Trans. Ultrason. Ferr. 2015, 62, 531–544. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Aardt, J.A.N.; Asner, G.P. A comparison of signal deconvolution algorithms based on small-footprint liDAR waveform simulation. IEEE Trans. Geosci. Remote 2011, 49, 2402–2414. [Google Scholar] [CrossRef]
- Kirk, B.H.; Martone, A.F.; Sherbondy, K.D.; Narayanan, R.M. Mitigation of target distortion in pulse-agile sensors via Richardson-Lucy deconvolution. Electron. Lett. 2019, 55, 1249–1252. [Google Scholar] [CrossRef]
- Zhao, H.F.; Li, C.X.; Gong, X.Y.; Zeng, X.H. Delay-Doppler deconvolution image formation for multiple targets in waveguide environment. Acta Acustica 2017, 36, 473–488. [Google Scholar]
- Zeng, W.J.; Jiang, X.; Li, X.L.; Zhang, X.D. Deconvolution of sparse underwater acoustic multipath channel with a large time-delay spread. J. Acoust. Soc. Am. 2010, 127, 909–919. [Google Scholar] [CrossRef]
- Richardson, W.H. Bayesian-based iterative method of image restoration. J. Opt. Soc. Am. 1972, 62, 55–59. [Google Scholar] [CrossRef]
- Lucy, L.B. An iterative technique for the rectification of observed distributions. Astron. J. 1974, 79, 745–754. [Google Scholar] [CrossRef] [Green Version]
- Li, C.X.; Xu, W.; Li, J.L.; Gong, X.Y. Time-reversal detection of multidimensional signals in underwater acoustic. IEEE J. Ocean. 2011, 36, 61–71. [Google Scholar] [CrossRef]
- Pan, X.; Li, C.X.; Xu, W.; Gong, Y.X. Combination of time-reversal focusing and nulling for detection of small targets in strong reverberation environments. IET Radar Sonar Navig. 2014, 8, 9–16. [Google Scholar] [CrossRef]
- Li, C.X.; Lu, H.C.; Guo, M.F.; Zhao, H.F. Decomposition of the time reversal operator for target detection. Math. Probl. Eng. 2012, 2012, 597474. [Google Scholar] [CrossRef]
- Sabra, K.G.; Roux, P.; Song, H.C.; Hodgkiss, W.S.; Kuperman, W.A.; Akal, T.; Stevenson, J.M. Experimental demonstration of iterative time-reversed reverberation focusing in a rough waveguide. Application to target detection. J. Acoust. Soc. Am. 2006, 120, 1305–1314. [Google Scholar] [CrossRef]
- Prada, C.; Thomas, J.L.; Fink, M. The iterative time reveral process: Analysis of the convergence. J. Acoust. Soc. Am. 1995, 97, 62–71. [Google Scholar] [CrossRef]
- Li, C.X.; Guo, M.F.; Wang, Z.K. Wideband imaging of extended targets with the decomposition of the time reversal operator. Acta Acustica 2020, 39, 192–206. [Google Scholar]
- Abduljabbar, A.M.; Yavuz, M.E.; Costen, F.; Himeno, R.; Yokota, H. Continuous wavelet transform-based frequency dispersion compensation method for electromagnetic time-reversal imaging. IEEE Tran. Anten. Propag. 2017, 65, 1321–1328. [Google Scholar] [CrossRef]
- Moura, J.M.F.; Jin, Y. Detection by time reversal: Single antenna. IEEE Trans. Signal Process. 2007, 55, 187–201. [Google Scholar] [CrossRef]
- O’Sullivan, J.A.; Blahut, R.E.; Snyder, D.L. Information-theoretic imaging formation. IEEE Trans. Inform. Theory 1998, 44, 2094–2123. [Google Scholar] [CrossRef]
- Blahut, R.E. Theory of Remote Imaging Formation, 1st ed.; Cambridge University Press: Cambridge, NY, USA, 2004; pp. 379–385. [Google Scholar]
- Snyder, D.L.; Schulz, T.J.; O’Sullivan, J.A. Deblurring subject to nonnegativity constrains. IEEE Trans. Signal Process. 1992, 40, 1143–1150. [Google Scholar] [CrossRef]
- Cepni, A.G.; Stancil, D.D.; Henty, B.; Jiang, Y.; Jin, Y.; Moura, J.M.F.; Zhu, J.G. Experimental results on single antenna target detection using time-reversal techniques. In Proceedings of the 2006 IEEE Antennas and Propagation Society International Symposium, Albuquerque, NM, USA, 9–14 July 2006; pp. 703–706. [Google Scholar]
- Porter, M.B. The KRAKEN Normal Mode Program; SACLANT Undersea Research Centre: La Spezia, Italy, 1991. [Google Scholar]
- Oppenheim, A.N.; Schafer, R.W.; Buck, J.R. Discrete-time Signal Processing, 2nd ed.; Prentice-Hall, Inc. Press: Upper Saddle River, NJ, USA, 1998; pp. 582–587. [Google Scholar]
- Van Trees, H.L. Optimum Array Processing; Wiley: New York, NY, USA, 2002; pp. 65–66. [Google Scholar]
- Yang, T.C. Deconvolved conventional beamforming for a horizontal line array. IEEE J. Ocean. 2018, 43, 160–172. [Google Scholar] [CrossRef]
- Li, L.; Qi, H.; Yin, Z.; Li, D.; Zhu, Z.; Tangwarodomnukun, V.; Tan, D. Investigation on the multiphase sink vortex Ekman pumping effects by CFD-DEM coupling method. Powder Technol. 2020, 360, 462–480. [Google Scholar] [CrossRef]
- Pan, Y.; Ji, S.; Tan, D.; Cao, H. Cavitation based soft abrasive flow processing method. Int. J. Adv. Manuf. Technol. 2019. in Press. [Google Scholar] [CrossRef]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.-X.; Guo, M.-F.; Zhao, H.-F. An Iterative Deconvolution-Time Reversal Method with Noise Reduction, a High Resolution and Sidelobe Suppression for Active Sonar in Shallow Water Environments. Sensors 2020, 20, 2844. https://doi.org/10.3390/s20102844
Li C-X, Guo M-F, Zhao H-F. An Iterative Deconvolution-Time Reversal Method with Noise Reduction, a High Resolution and Sidelobe Suppression for Active Sonar in Shallow Water Environments. Sensors. 2020; 20(10):2844. https://doi.org/10.3390/s20102844
Chicago/Turabian StyleLi, Chun-Xiao, Ming-Fei Guo, and Hang-Fang Zhao. 2020. "An Iterative Deconvolution-Time Reversal Method with Noise Reduction, a High Resolution and Sidelobe Suppression for Active Sonar in Shallow Water Environments" Sensors 20, no. 10: 2844. https://doi.org/10.3390/s20102844