Geometric Model and Calibration Method for a Solid-State LiDAR




Abstract
:1. Introduction
2. Problem and Model Formulation
2.1. The Problem
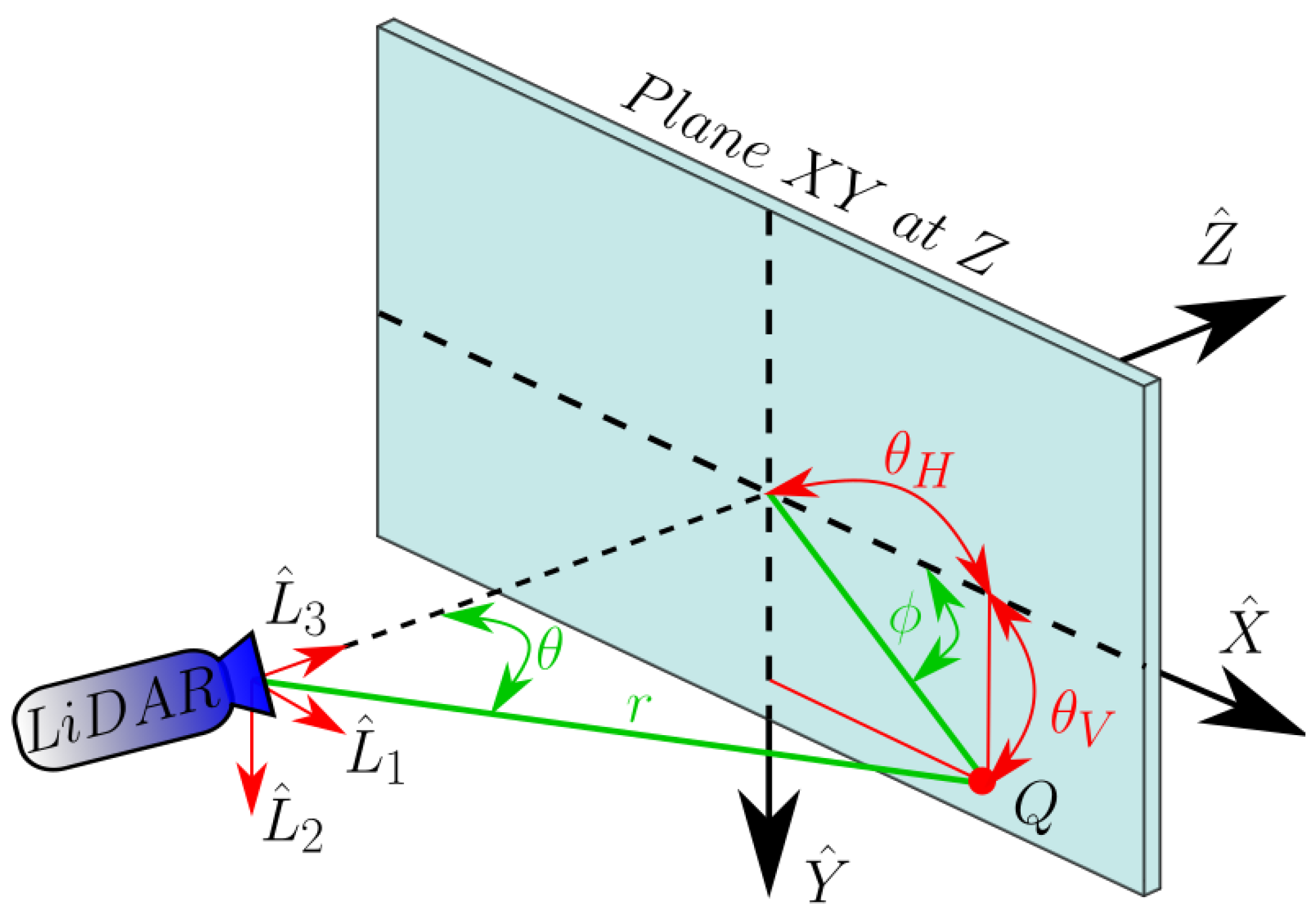
2.2. The Model
3. Materials and Methods
3.1. Calibration Method
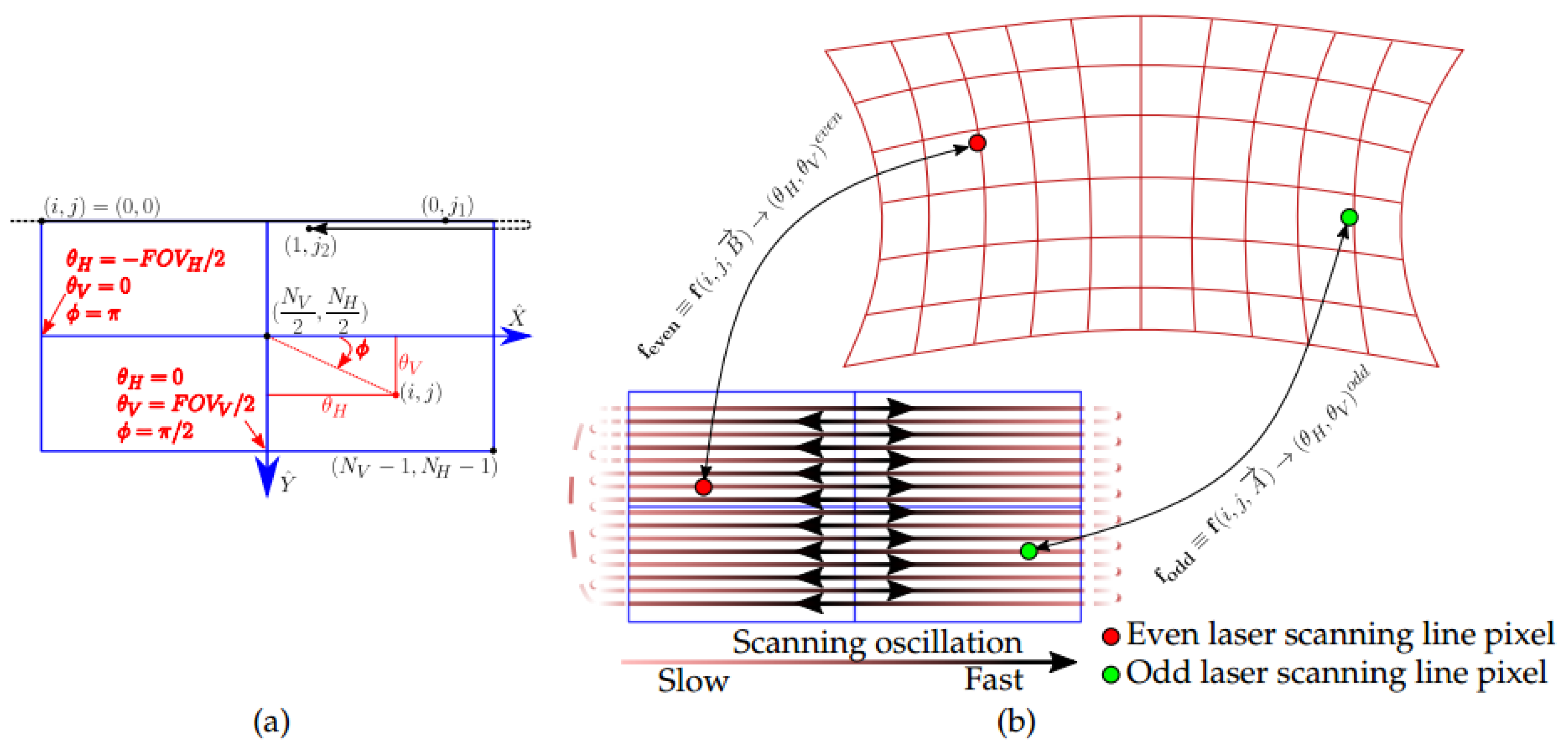
3.2. Distortion Mapping Equations
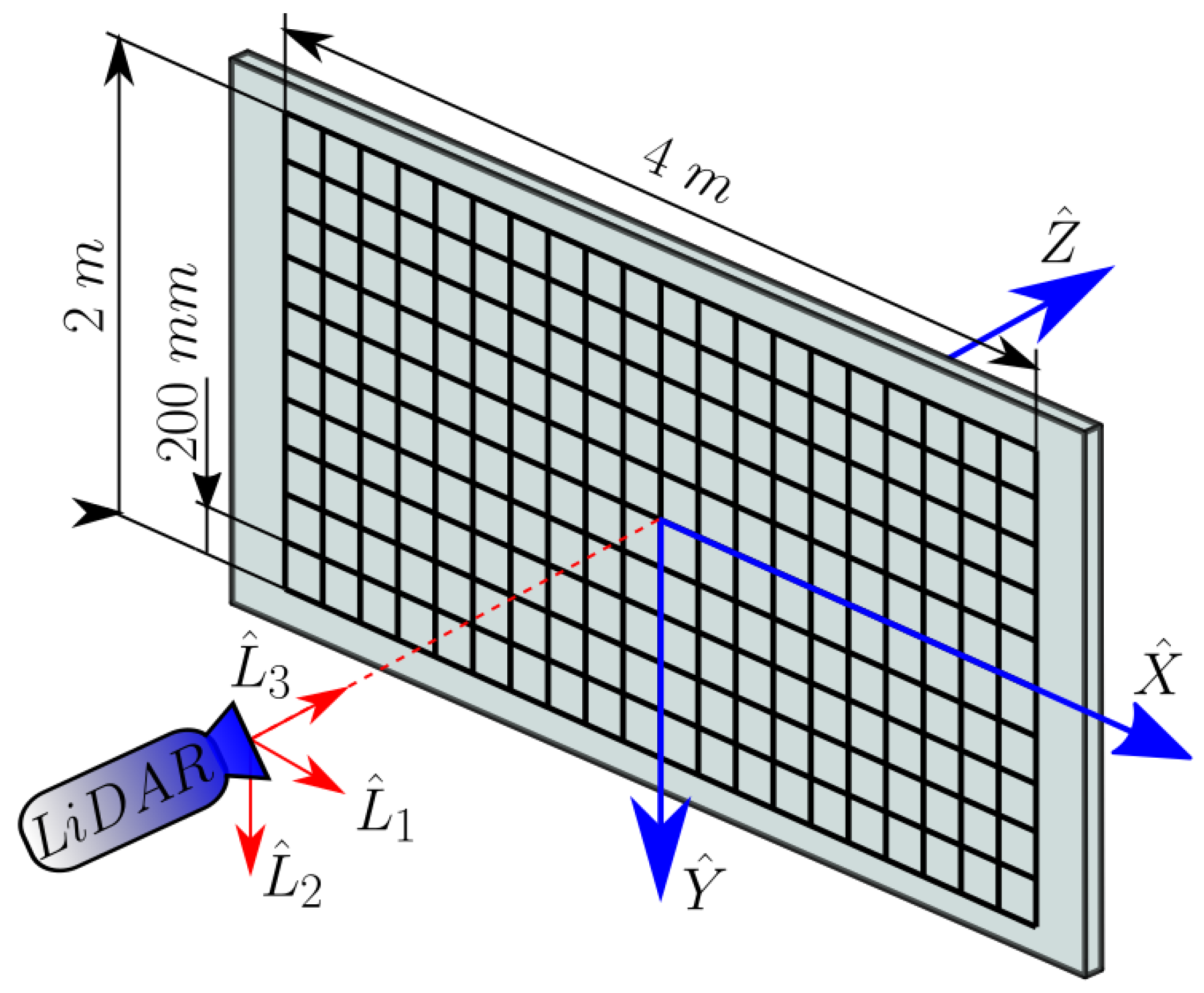
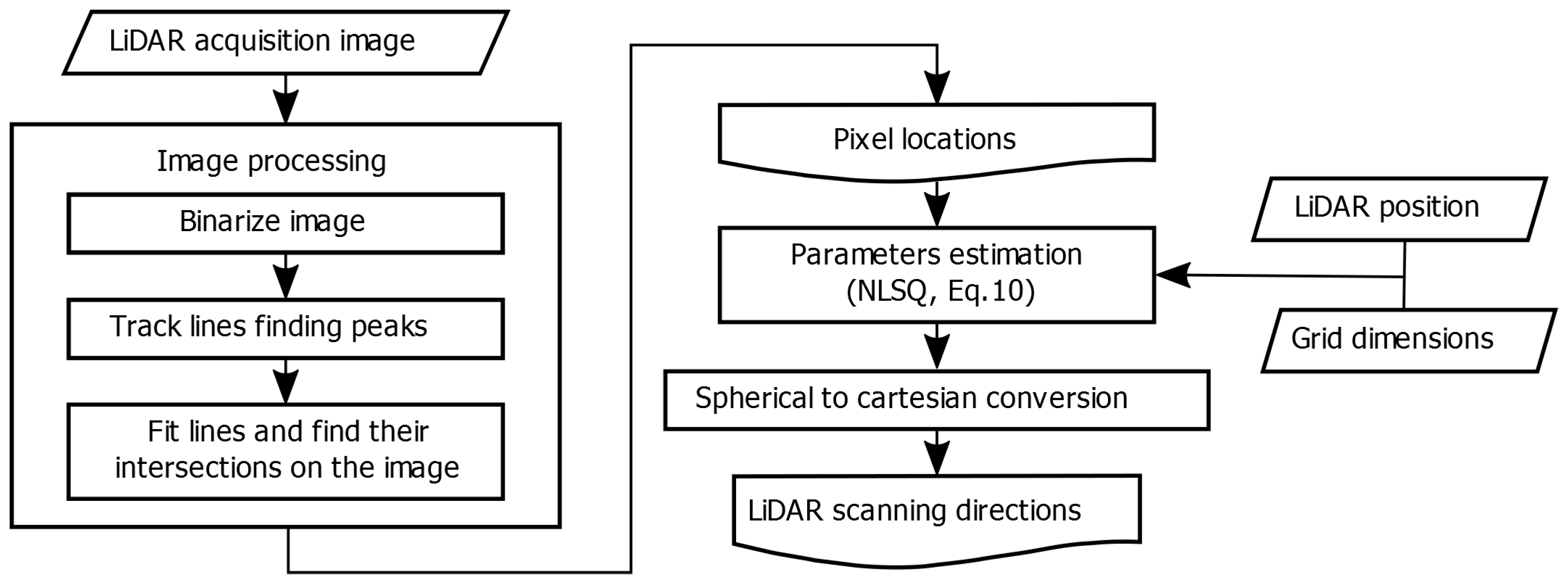
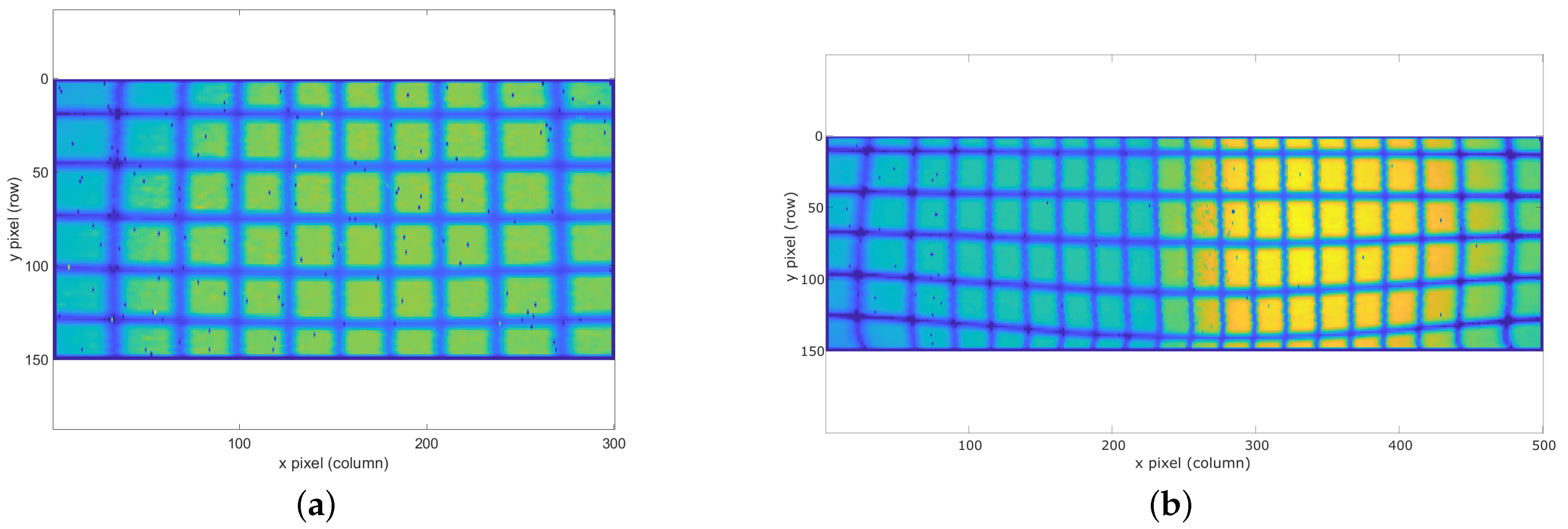
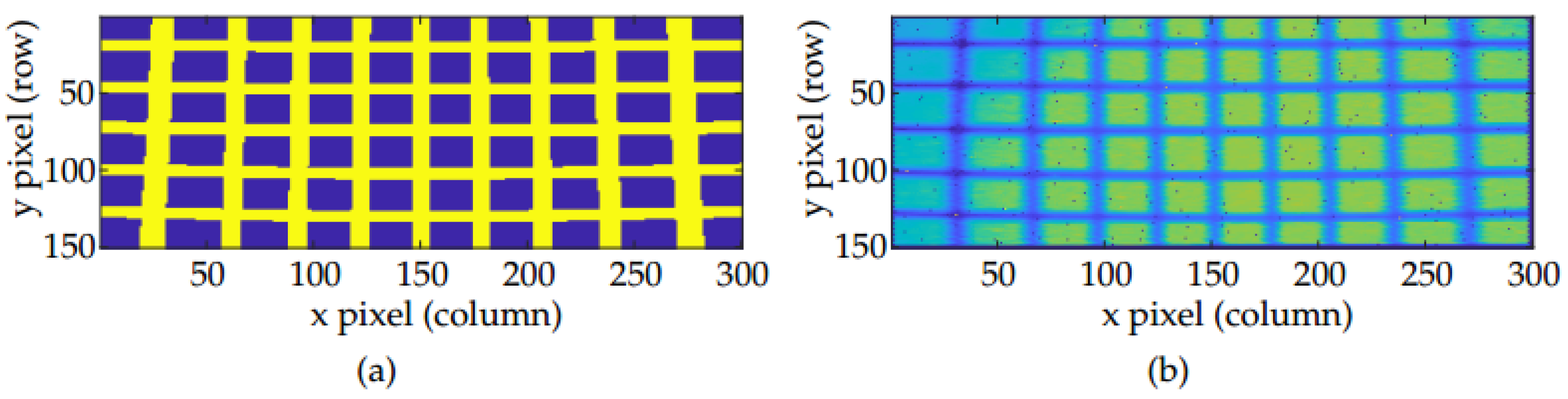
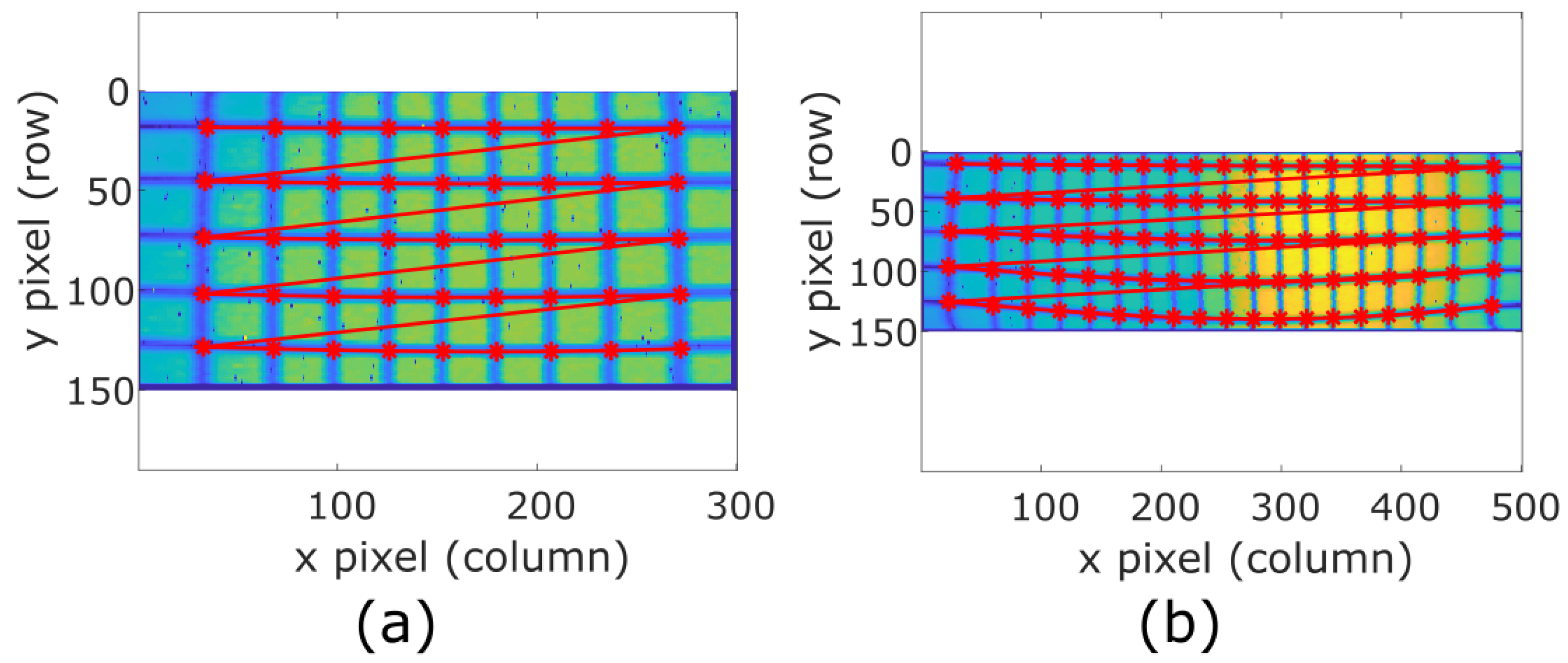
3.3. Calibration Pattern and Algorithm
| Algorithm 1: Image processing for obtaining the pixel locations of the lines’ intersections. |
 |
3.4. Prototypes
4. Results
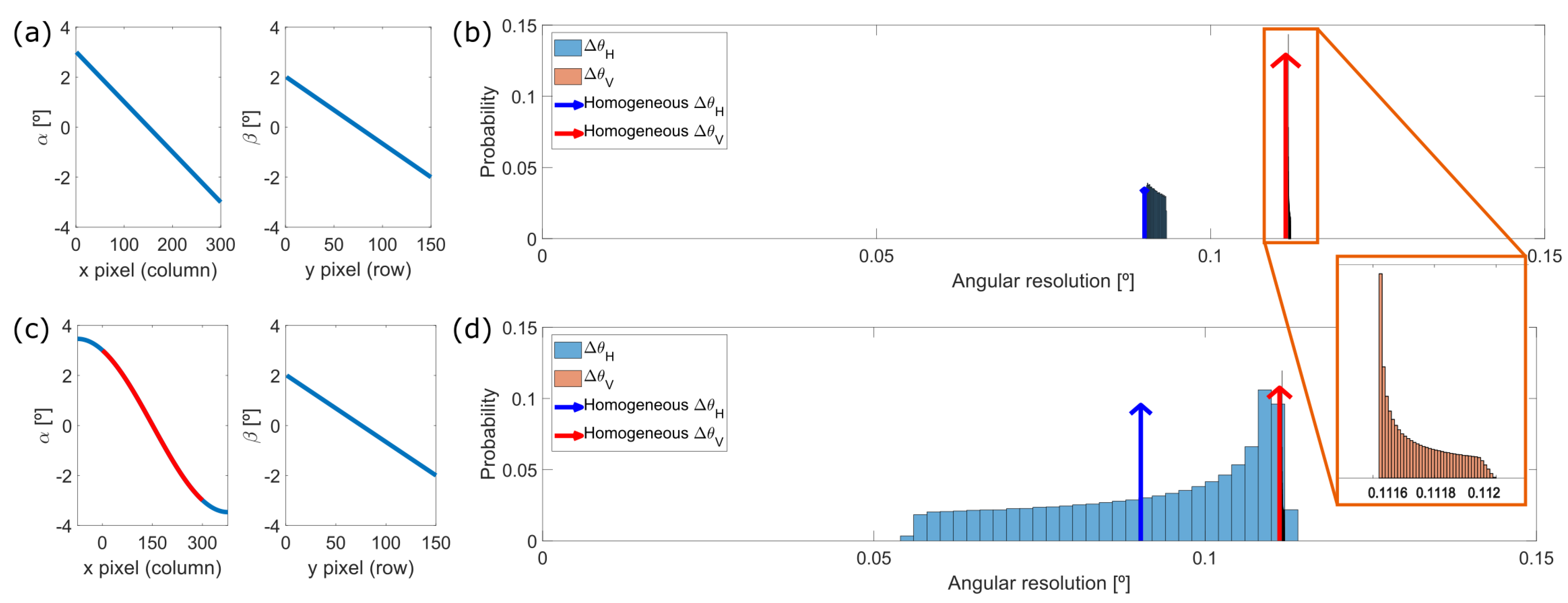
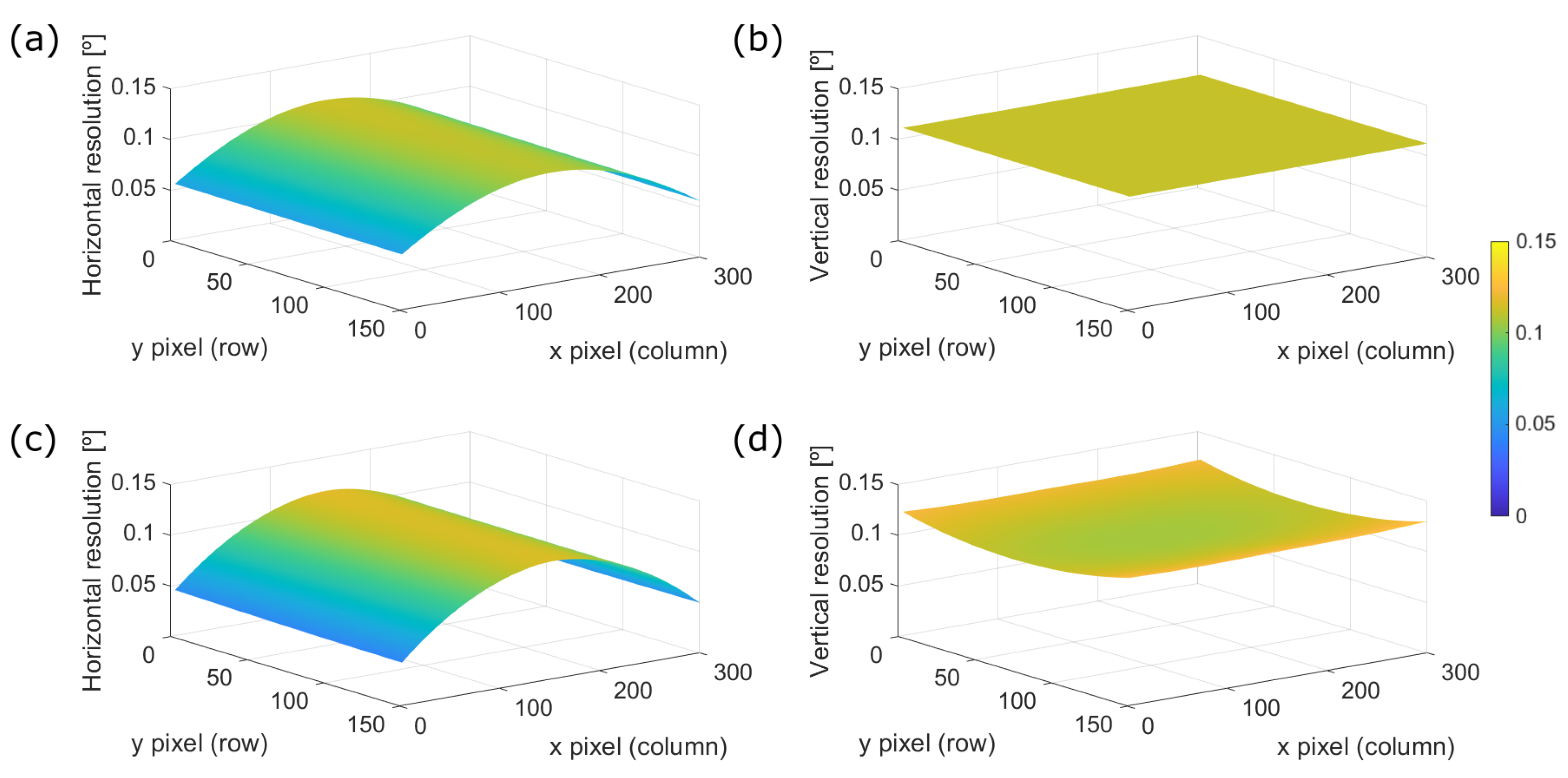
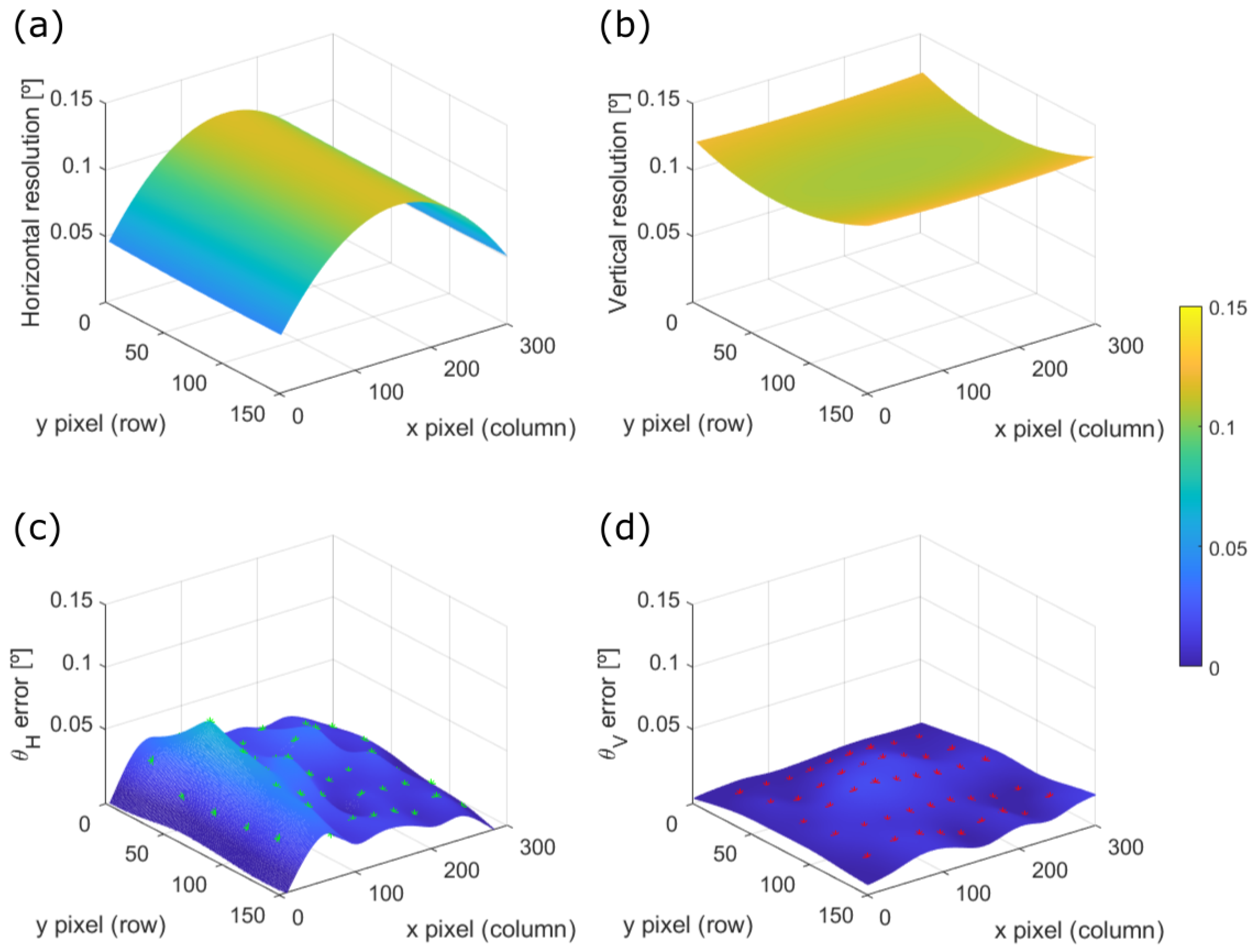
4.1. Model Simulation
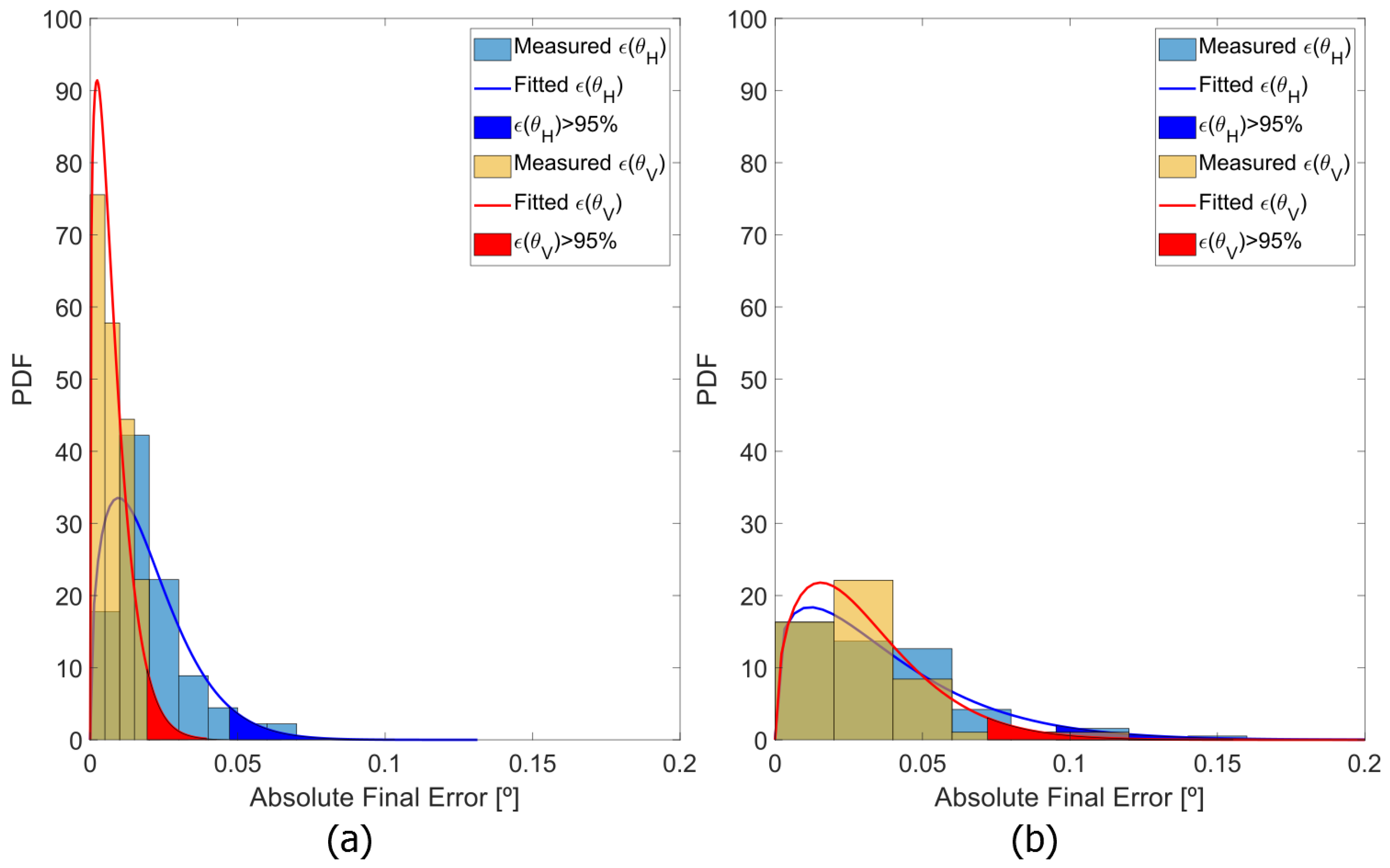
4.2. Calibration Results
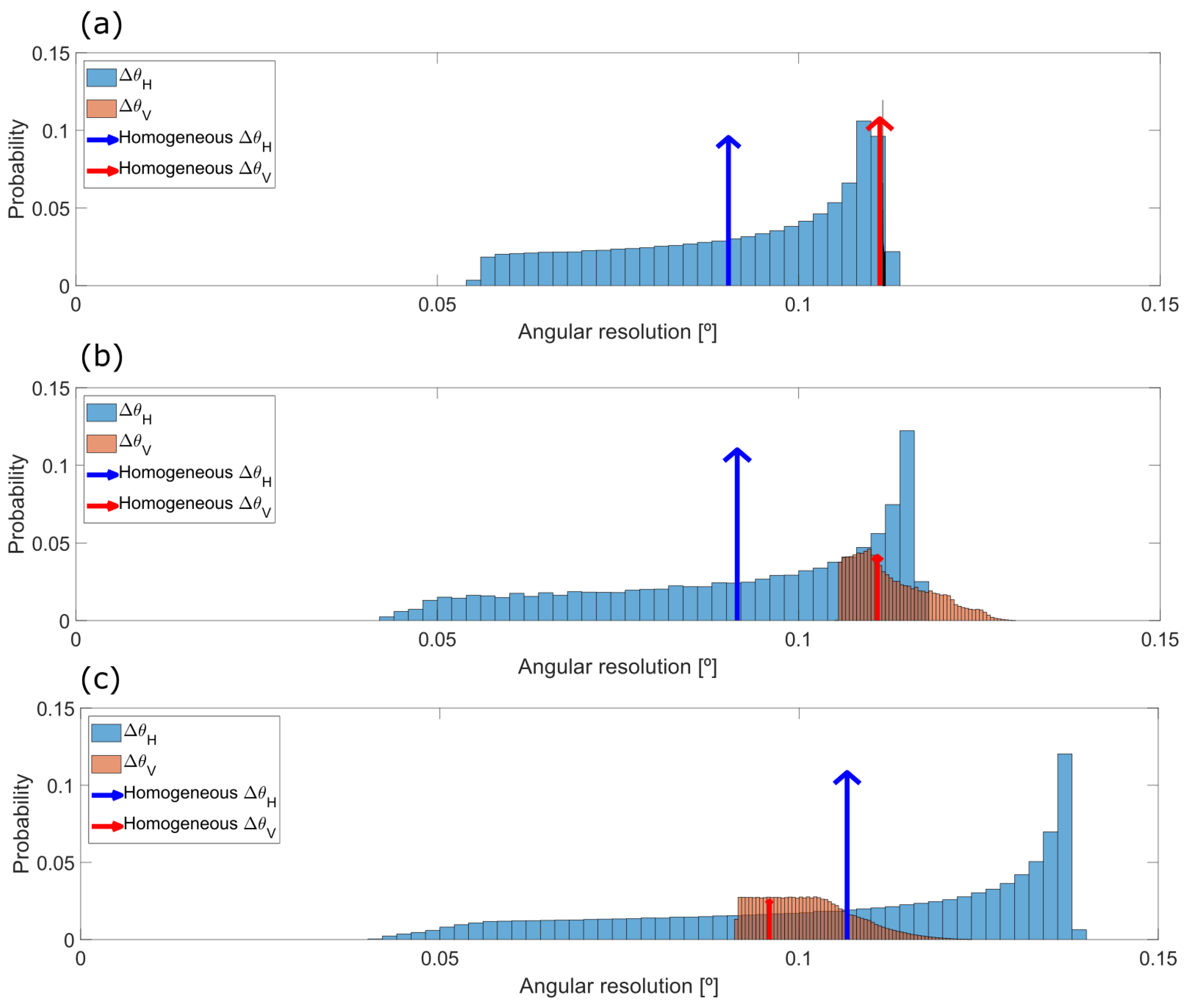
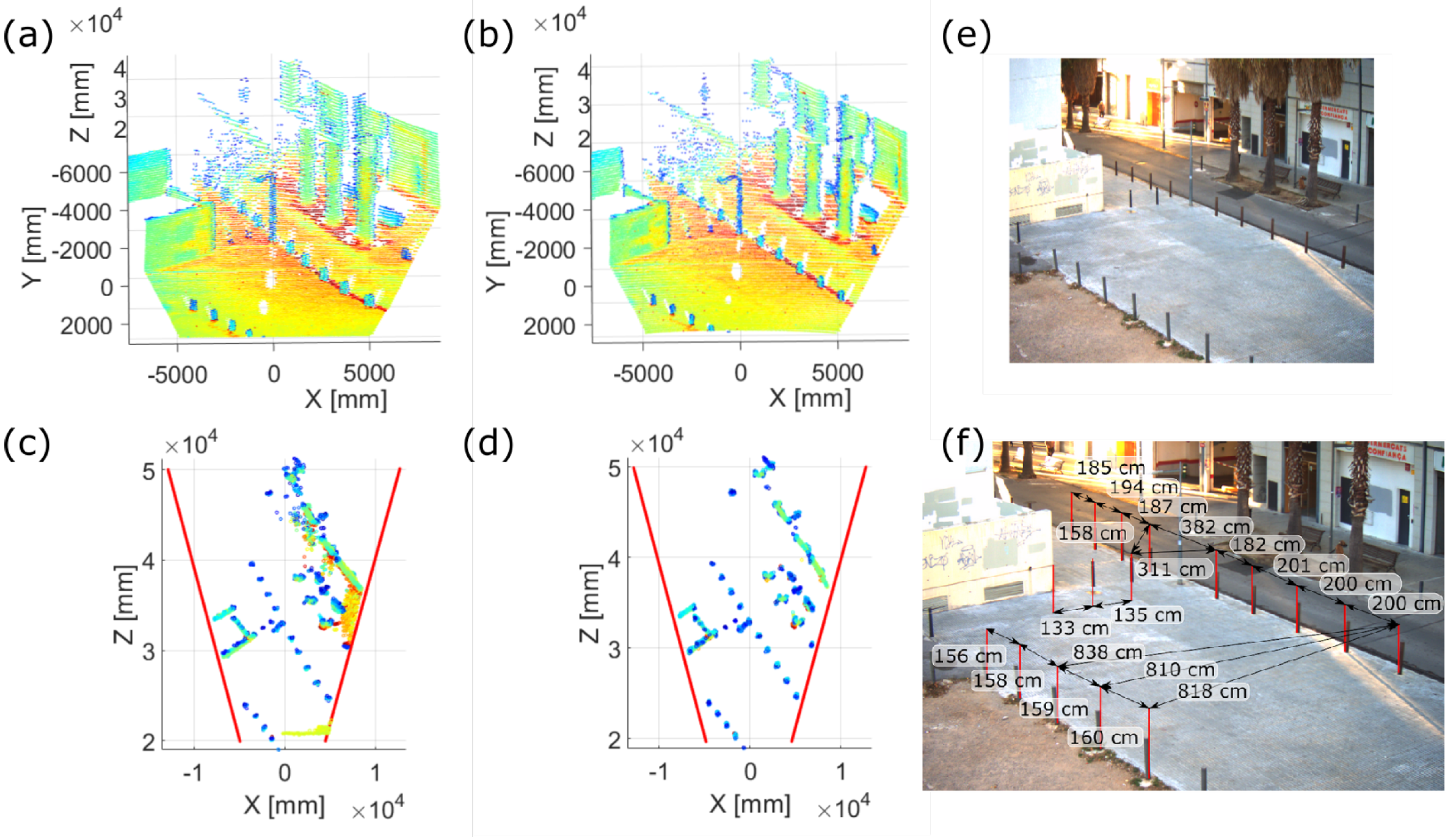
4.3. Impact on the Point Cloud
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
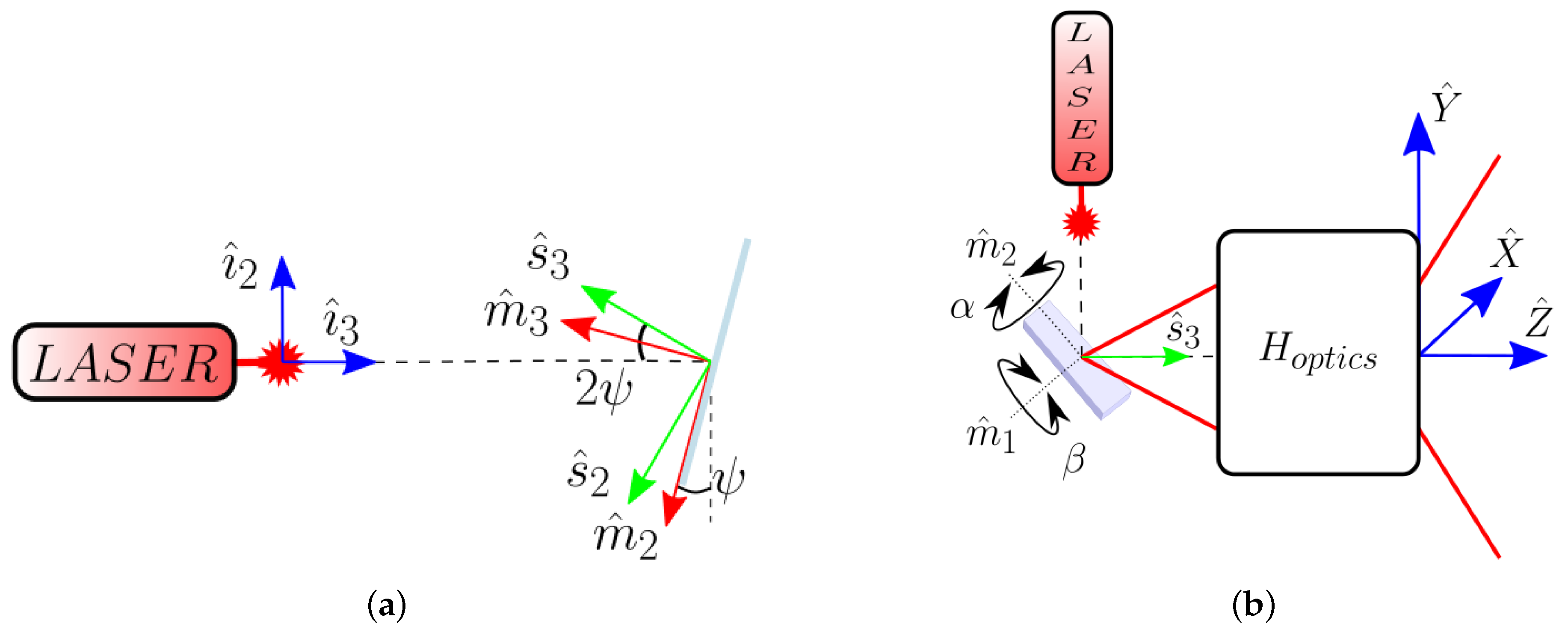
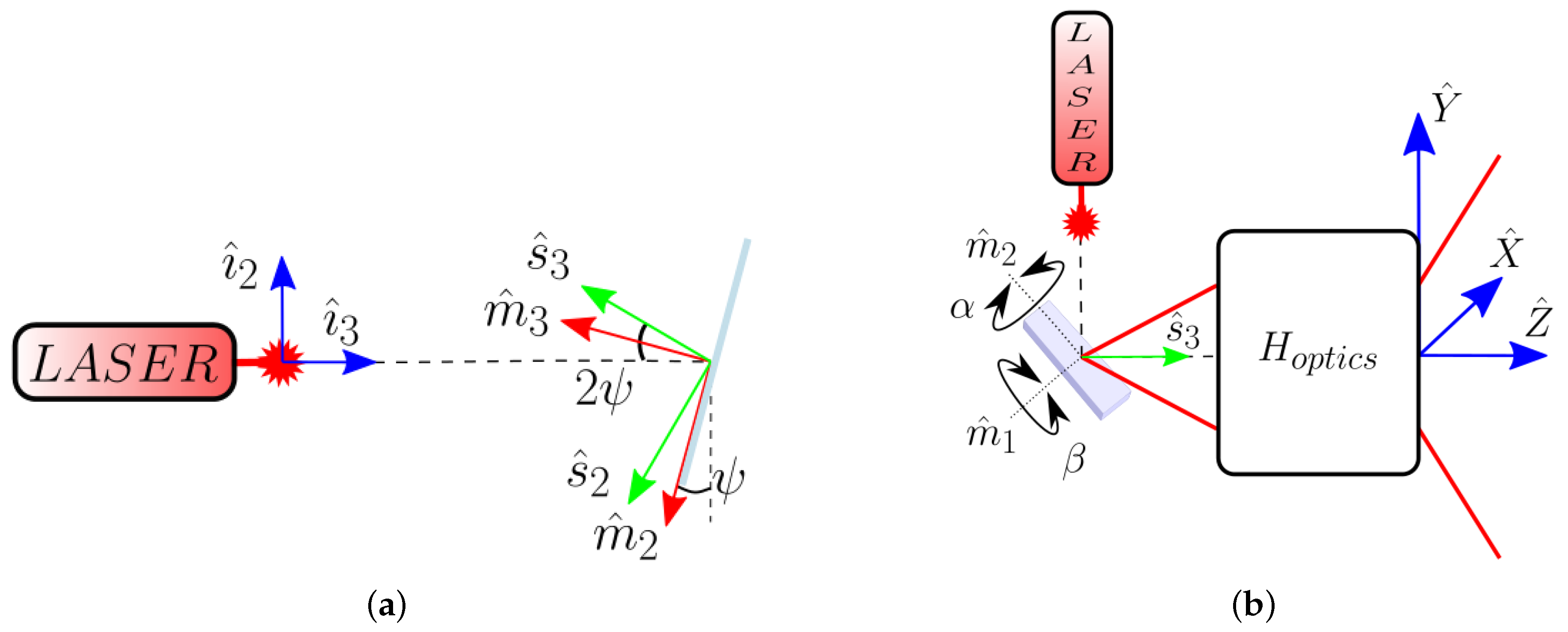
Appendix A.1. Vectorial Snell’s Law
Appendix A.2. Geometrical Model of MEMS Scanning
References
- Fernald, F.G. Analysis of atmospheric lidar observations: Some comments. Appl. Opt. AO 1984, 23, 652. [Google Scholar] [CrossRef] [PubMed]
- Korb, C.L.; Gentry, B.M.; Weng, C.Y. Edge technique: Theory and application to the lidar measurement of atmospheric wind. Appl. Opt. 1992, 31, 4202–4213. [Google Scholar] [CrossRef] [PubMed]
- McGill, M.J. Lidar Remote Sensing. In Encyclopedia of Optical Engineering; Marcel Dekker: New York, NY, USA, 2003; pp. 1103–1113. [Google Scholar]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. Earth Environ. 2008, 32, 31–49. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F. Full-waveform topographic lidar: State-of-the-art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Azuma, R.T.; Malibu, I. A Survey of Augmented Reality. Presence Teleoperators Virtual Environ. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- Azuma, R.; Baillot, Y.; Behringer, R.; Feiner, S.; Julier, S.; MacIntyre, B. Recent advances in augmented reality. IEEE Comput. Graph. Appl. 2001, 21, 34–47. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, B. LIDAR: Mapping the world in 3D. Nat. Photonics 2010, 4, 429–430. [Google Scholar] [CrossRef]
- Royo, S.; Ballesta-Garcia, M. An Overview of Lidar Imaging Systems for Autonomous Vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef] [Green Version]
- Takagi, K.; Morikawa, K.; Ogawa, T.; Saburi, M. Road Environment Recognition Using On-vehicle LIDAR. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006; pp. 120–125. [Google Scholar] [CrossRef]
- Premebida, C.; Monteiro, G.; Nunes, U.; Peixoto, P. A Lidar and Vision-based Approach for Pedestrian and Vehicle Detection and Tracking. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 1044–1049. [Google Scholar] [CrossRef]
- Gallant, M.J.; Marshall, J.A. The LiDAR compass: Extremely lightweight heading estimation with axis maps. Robot. Auton. Syst. 2016, 82, 35–45. [Google Scholar] [CrossRef]
- Huynh, D.Q.; Owens, R.A.; Hartmann, P.E. Calibrating a Structured Light Stripe System: A Novel Approach. Int. J. Comput. Vis. 1999, 33, 73–86. [Google Scholar] [CrossRef]
- Glennie, C.; Lichti, D.D. Static Calibration and Analysis of the Velodyne HDL-64E S2 for High Accuracy Mobile Scanning. Remote Sens. 2010, 2, 1610–1624. [Google Scholar] [CrossRef] [Green Version]
- Muhammad, N.; Lacroix, S. Calibration of a rotating multi-beam lidar. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5648–5653. [Google Scholar] [CrossRef]
- Atanacio-Jiménez, G.; González-Barbosa, J.J.; Hurtado-Ramos, J.B.; Ornelas-Rodríguez, F.J.; Jiménez-Hernández, H.; García-Ramirez, T.; González-Barbosa, R. LIDAR Velodyne HDL-64E Calibration Using Pattern Planes. Int. J. Adv. Robot. Syst. 2011, 8, 59. [Google Scholar] [CrossRef]
- Mirzaei, F.M.; Kottas, D.G.; Roumeliotis, S.I. 3D LIDAR–camera intrinsic and extrinsic calibration: Identifiability and analytical least-squares-based initialization. Int. J. Robot. Res. 2012, 31, 452–467. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.; Chen, X.; Xi, J. Modeling and Calibration of a Novel One-Mirror Galvanometric Laser Scanner. Sensors 2017, 17, 164. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, S.; Zhu, X.; Wang, W.; Xie, Y. Calibration of a laser galvanometric scanning system by adapting a camera model. Appl. Opt. AO 2009, 48, 2632–2637. [Google Scholar] [CrossRef]
- Rodriguez, F.S.A.; Fremont, V.; Bonnifait, P. Extrinsic calibration between a multi-layer lidar and a camera. In Proceedings of the 2008 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Seoul, Korea, 20–22 August 2008; pp. 214–219. [Google Scholar] [CrossRef] [Green Version]
- Kwak, K.; Huber, D.F.; Badino, H.; Kanade, T. Extrinsic calibration of a single line scanning lidar and a camera. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3283–3289. [Google Scholar]
- Zhou, L.; Deng, Z. Extrinsic calibration of a camera and a lidar based on decoupling the rotation from the translation. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 642–648. [Google Scholar] [CrossRef]
- García-Moreno, A.I.; Gonzalez-Barbosa, J.J.; Ornelas-Rodriguez, F.J.; Hurtado-Ramos, J.B.; Primo-Fuentes, M.N. LIDAR and Panoramic Camera Extrinsic Calibration Approach Using a Pattern Plane. In Pattern Recognition; Hutchison, D., Kanade, T., Kittler, J., Kleinberg, J.M., Mattern, F., Mitchell, J.C., Naor, M., Nierstrasz, O., Pandu Rangan, C., Steffen, B., et al., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7914, pp. 104–113. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.; Yun, S.; Won, C.S.; Cho, K.; Um, K.; Sim, S. Calibration between Color Camera and 3D LIDAR Instruments with a Polygonal Planar Board. Sensors 2014, 14, 5333–5353. [Google Scholar] [CrossRef] [Green Version]
- Dhall, A.; Chelani, K.; Radhakrishnan, V.; Krishna, K.M. LiDAR-Camera Calibration using 3D-3D Point correspondences. arXiv 2017, arXiv:1705.09785. [Google Scholar]
- Guindel, C.; Beltrán, J.; Martín, D.; García, F. Automatic extrinsic calibration for lidar-stereo vehicle sensor setups. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Urey, H.; Holmstrom, S.; Baran, U. MEMS laser scanners: A review. J. Microelectromech. Syst. 2014, 23, 259. [Google Scholar] [CrossRef]
- Ortiz, S.; Siedlecki, D.; Grulkowski, I.; Remon, L.; Pascual, D.; Wojtkowski, M.; Marcos, S. Optical distortion correction in Optical Coherence Tomography for quantitative ocular anterior segment by three-dimensional imaging. Opt. Express OE 2010, 18, 2782–2796. [Google Scholar] [CrossRef]
- Brown, D.C. Decentering Distortion of Lenses. Photogramm. Eng. 1966, 32, 444–462. [Google Scholar]
- Swaninathan, R.; Grossberg, M.D.; Nayar, S.K. A perspective on distortions. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; Volume 2. [Google Scholar] [CrossRef] [Green Version]
- Pan, B.; Yu, L.; Wu, D.; Tang, L. Systematic errors in two-dimensional digital image correlation due to lens distortion. Opt. Lasers Eng. 2013, 51, 140–147. [Google Scholar] [CrossRef]
- Bauer, A.; Vo, S.; Parkins, K.; Rodriguez, F.; Cakmakci, O.; Rolland, J.P. Computational optical distortion correction using a radial basis function-based mapping method. Opt. Express OE 2012, 20, 14906–14920. [Google Scholar] [CrossRef] [PubMed]
- Li, A.; Wu, Y.; Xia, X.; Huang, Y.; Feng, C.; Zheng, Z. Computational method for correcting complex optical distortion based on FOV division. Appl. Opt. AO 2015, 54, 2441–2449. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Guo, X.; Wang, P.; Zhang, B. Computational optical distortion correction based on local polynomial by inverse model. Optik 2017, 132, 388–400. [Google Scholar] [CrossRef]
- Heikkila, J.; Silven, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, Puerto Rico, 17–19 June 1997; pp. 1106–1112. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Figure of Merit [Mdeg] | Dir. | 30 × 20 | 50 × 20 | ||||
|---|---|---|---|---|---|---|---|
| Map 1 | Map 2 | Map 3 | Map 1 | Map 2 | Map 3 | ||
| Homogeneous FOV [] | Odd | 27.55 × 16.32 | 27.47 × 16.54 | 27.47 × 16.52 | 52.89 × 13.96 | 53.19 × 14.44 | 53.34 × 14.38 |
| Even | 27.25 × 16.44 | 27.46 × 16.64 | 27.45 × 16.63 | 53.08 × 13.33 | 53.07 × 14.27 | 53.07 × 14.21 | |
| Mean error | Odd | 25 × 28 | 21 × 9 | 20 × 8 | 101 × 89 | 45 × 40 | 37 × 31 |
| Even | 23 × 24 | 22 × 9 | 22 × 9 | 108 × 118 | 47 × 64 | 46 × 37 | |
| Standard deviation | Odd | 24 × 23 | 14 × 5 | 14 × 5 | 66 × 97 | 34 × 32 | 29 × 22 |
| Even | 24 × 18 | 14 × 7 | 14 × 7 | 73 × 110 | 37 × 48 | 35 × 31 | |
| Max. angular error (<95%) | Odd | 79 × 70 | 48 × 17 | 47 × 19 | 239 × 274 | 117 × 103 | 95 × 72 |
| Even | 77 × 60 | 48 × 25 | 47 × 26 | 265 × 324 | 117 × 165 | 113 × 98 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Gómez, P.; Royo, S.; Rodrigo, N.; Casas, J.R. Geometric Model and Calibration Method for a Solid-State LiDAR. Sensors 2020, 20, 2898. https://doi.org/10.3390/s20102898
García-Gómez P, Royo S, Rodrigo N, Casas JR. Geometric Model and Calibration Method for a Solid-State LiDAR. Sensors. 2020; 20(10):2898. https://doi.org/10.3390/s20102898
Chicago/Turabian StyleGarcía-Gómez, Pablo, Santiago Royo, Noel Rodrigo, and Josep R. Casas. 2020. "Geometric Model and Calibration Method for a Solid-State LiDAR" Sensors 20, no. 10: 2898. https://doi.org/10.3390/s20102898
APA StyleGarcía-Gómez, P., Royo, S., Rodrigo, N., & Casas, J. R. (2020). Geometric Model and Calibration Method for a Solid-State LiDAR. Sensors, 20(10), 2898. https://doi.org/10.3390/s20102898