1. Introduction
Unmanned Aerial Vehicle-aided wireless sensor networks (UAV-aided WSN) have gained more and more interest due to their many applications in monitoring, surveillance, and exploring in healthcare, agriculture, industry, and military [
1,
2,
3,
4,
5]. Among UAVs’ applications, one of the key functions is the data collection [
6,
7,
8,
9,
10,
11]. These works focus on deterministic topology where the nodes are deployed statically, and the locations of the sensors are known. The data collection issues addressed on dynamic topology, which are usually used in applications such as maritime detection, traffic surveillance, and wilderness rescuing where the targets are moving and no static sensors are deployed in advance, are seldom covered.
The main difference between the static network and mobile network are: the transmission opportunities for nodes that are within the coverage of the UAV are different. In static case, all covered nodes are static, the relative velocity (
) between the nodes and the UAV are the same. Thus, the contact durations (CD) between them with the UAV depend on the relative distance (
) between them (
, see [
12,
13] for more details). The relative distances almost have no difference if the UAV flies at a higher altitude. However, in mobile case, when the nodes move at different velocities, the CD are different greatly even the relative distance is the same. Intuitively, the shorter the CD between them, the smaller the opportunities for the mobile node to communicate with the UAV. When the CD is very short, the mobile node may have no opportunity to communicate with the UAV if no attention is paid on the CD between it with the UAV. Thus, a contact-duration-based data collection algorithm should be designed for such context despite a large array of existing data collection algorithms (see
Section 2. related works) on UAV-aided static WSNs.
The impact factors of the CD between mobile nodes and the UAV include two aspects: (a) the relative distance between the sensor and the UAV, and (b) the relative velocity between them. Priority-based Frame Selection (PFS) [
14,
15] is a one-hop mechanism based on the relative distance according to which the nodes are divided into different priority groups. Communications are conducted from higher to lower priorities. A multi-hop highest velocity opportunistic algorithm which is based on relative velocity between mobile nodes and the UAV is proposed in [
16]. The ones that have higher velocity have longer CD with the UAV, therefore were selected as forwarded nodes. In our previous work [
12,
13], we studied the data collection maximization issues in single UAV enabled mobile WSN where the pre-defined path is a straight path without comparison with existing works and real experiments. The curve path and multi-UAVs aspects are also not covered in the previous work. Thus, a large room for enhancing the network performance still exists.
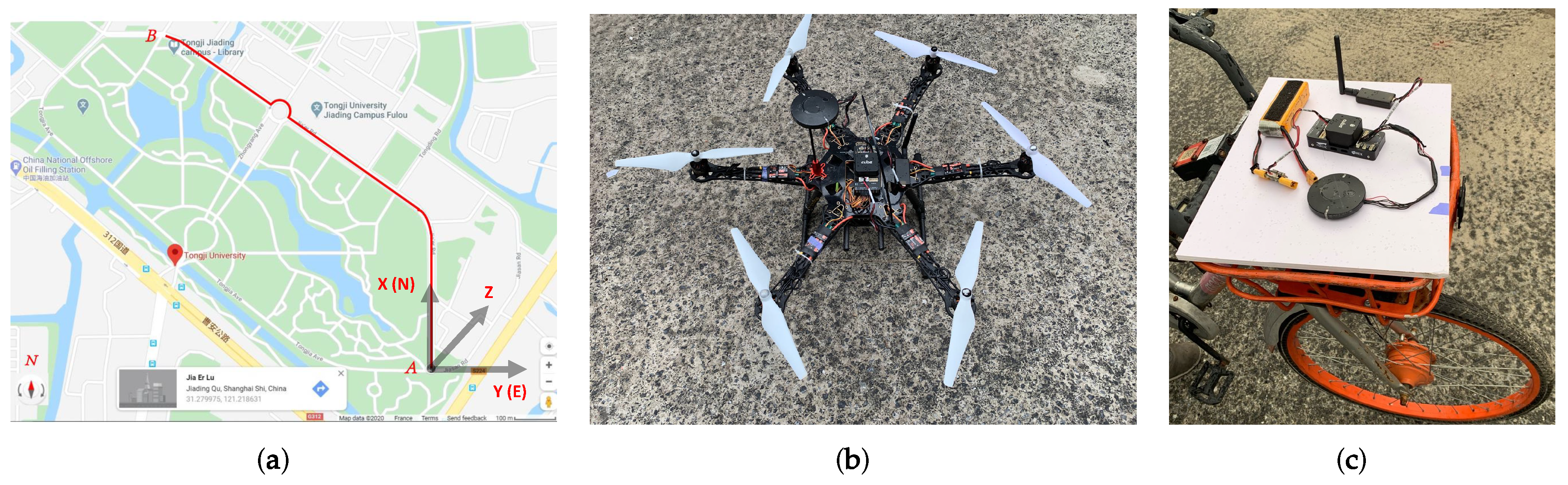
In this work, we focus on multi-UAV aided mobile WSN,
Figure 1, where the nodes are deployed on mobile bicycles and move along a pre-defined curve path. Considering that, in the context of the nodes move along a path, two UAVs are enough to cover all mobile nodes when (as in
Figure 1)
take-off from the original point of the path and fly along the path,
take-off from the end-point of the path and fly along the path. Data collection issues in such contexts contain two aspects. End-to-end data collection is a very complex problem. In this paper, we focus on the access link. As the literature, on this kind of link between the sensors and the UAV [
6,
7], still does not propose efficient solutions. The access link suffers from the synchronization problem due to the high dynamic network, the coordination between the mobile nodes and the multi-UAVs. Providing the opportunity of communication to the nodes that have a very short duration with the UAVs reduces the congestion risk. On the other hand, extensive literature can be referred to, on the second link, on the backhaul link, between the UAVs and gateways [
17]. The second link is also challenging on several levels such as the data security, the security of UAVs, and the dimensioning of the backhaul. In our previous work [
18,
19], we focused on the backahul link with the satellite system. The proposed algorithms on mobile mules, in [
18,
19] are applicable for UAV-aided sensor networks. Moreover, because that the collected data (considering the value of data and distinguish the data collected from each sensor) could be stored in SD cards embedded on the UAV, thus, in this work, we focus on the access link. The data collection optimization objectives in such context include two aspects: (i) maximizing the number of collected packets, and (ii) maximizing the number of nodes that successfully send at least one packet during the collection period. Our main purpose is to jointly maximize the two aspects through formulating the dynamic parameters. Our main contributions are summarized as follows:
We study the impact of dynamic parameters, including the speed and flying height of UAV, the sensor speed, network size, and different priority areas. We mathematically formulate the data collection issue into the optimization with the objective of maximizing the number of collected packets and the number of sensors that successfully send packets to the UAVs.
Based on the dynamic parameters, we adopt a time-discrete mechanism and propose a prioritized-based multiple contact-duration frame selection algorithm (PMCdFS). PMCdFS algorithm is used for the balancing between the nodes (that are within the range of multi-UAVs at the same time) and multi-UAVs.
We improve the contact duration mechanism in our previous work (see [
12,
13] for more details) with the Prioritized Frame Selection (PFS) mechanism (see [
14,
15] for more details) and propose a prioritized-based contact-duration frame selection algorithm (PCdFS). PCdFS algorithm is a one-hop and slotted mechanism which is used to allocate the time-slot for the nodes that covered only by one of the UAVs.
We propose a Balance algorithm to solve the collision between the nodes and UAVs so as to optimize the aforementioned data collection performance.
Through extensive simulations, and real experiments, we examine the effectiveness of the proposed algorithms, and compare it with existing algorithm under different configurations.
The remainder of this paper is organized as follows: in the next section, we discuss previous related work.
Section 3 presents the system model and the problems formulated.
Section 4 present the proposed algorithms.
Section 5 evaluated the proposed algorithms through extensive simulations and real experiments.
Section 6 concludes this paper and gives some future work suggestions.
2. Related Works
There exists an extensive array of research on data collection in UAV-aided WSN with different objectives ranging from completion time minimization [
20], power controlling [
21], trajectory distance minimizing [
22] to energy consumption minimization [
23,
24]. We classify these existing data collection algorithms by two criteria: (i) Static or mobile nodes, and (ii) sensors are deployed along a path or deployed within an interesting area. In (i), algorithms are differentiated by whether the sensors mobile or not because the dynamic parameters brought by the movement of nodes in the network structure have a much greater impact on the system performance. In (ii), algorithms are differentiated by whether the nodes deployed along a path or not. The nodes deployed along a given path [
12,
13,
25,
26] so the UAV trajectory planning has very little impact on the network performance.
(i) Data collection algorithms addressed on mobile nodes. There are many works on studying how to collect data from WSN. The authors in [
4,
9,
27,
28,
29] review these works. According to the [
4,
9,
27,
28,
29], most of these algorithms only based on the mobile sink or only focused on mobile sensors. In our previous works [
12,
13,
16], we studied how to use UAV to collect data from mobile nodes based on an assumption that both the nodes and the UAV move along a straight path with constant speeds. The case where both the UAV and the nodes move in a curved path is not considered. Numerous researches have been done on statically deployed networks [
6,
7,
11,
14,
15,
20,
24,
25,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40].
(ii) Most of the aforementioned data collection algorithms can also be classified according to the deployed status of the nodes. Authors in [
12,
13,
16,
25,
34] studied how to use UAV to collect data from nodes that deployed along a straight path. Especially in [
25], the nodes deployed on a straight line, and the UAV flies over this line to collect data from nodes. In such context, the trajectory of the UAV is dependent on the path (or line) and has a light impact on the performance if the path is long enough. For instance, in [
25], the authors aim to minimize the flight time through jointly optimizing the transmit power of nodes, the UAV speed and the transmission intervals. For the case that nodes are deployed within the area of interest, one of the main issues is to plan the UAV’s trajectory so as to enhance the network performance. Numerous research has been done on the UAV trajectory planning issues [
6,
7,
20,
24,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40]. These works are different from the optimization method and objective function because of different scenarios. They are mainly classified into two types: single-UAV trajectory planning [
6,
7,
24,
30,
31,
32,
33,
34] and multi-UAV trajectory planning [
20,
35,
36,
37,
38,
39,
40].
The first is the single-UAV trajectory planning. Authors in [
33] use a UAV for the mobile edge computing system. They minimize the maximum delay of all ground users through jointly optimizing the offloading ratio, the users’ scheduling variables, and UAV’s trajectory. While, in [
24], the authors aim to minimize the maximum energy consumption by optimizing the trajectory of a rotary-wing UAV. The authors utilize a UAV to collect data from IoT devices with each has limited buffer size and target data upload deadline [
6]. In this study, the data should be transmitted before it loses its meaning or becomes irrelevant. To maximize the number of served IoT devices, they jointly optimize the radio resource allocation and the UAV’s trajectory.
The second is the multi-UAV trajectory planning. Multi-UAVs were used as mobile base stations to provide service for ground users in [
38]. They aim to maximize the minimum throughput of ground users by optimizing the trajectory for each UAV. Scholars in [
20] employ multi-UAVs to collect data from nodes. Through jointly optimizing the trajectories of UAVs, wake-up association and scheduling for sensors, they minimize the maximum mission completion time of all UAVs. The authors studied a multiple casting network utilizing the UAV to send files to all ground users [
37]. They aim to minimize the mission completion time of the UAVs through designing the UAV’s trajectory. Meanwhile, the proposed algorithms guarantee that each ground user can successfully recover the file. In urban applications, the authors proposed a risk-aware trajectory planning algorithm [
36] for multi-UAVs. Under the same test scenarios, authors in [
39] aim to minimize the mission time by planning the trajectory of each UAV. The scholars exploit the nested Markov chains to analyze the probability for successful data transmission [
40]. They propose a sense-and-send mechanism [
40] for real-time sensing missions, and a multi-UAVs enabled Q-learning algorithm for decentralized UAV trajectory planning.
In other cases. The authors in [
11] use a single UAV to collect data from harsh terrains. Due to the large scale of the detection area, the network has a high demand for power. They adopted a rechargeable mechanism to extend the lifetime of the UAV so as to enhance the collection period. The PFS mechanism in [
14,
15] is based on the nodes’ positions for the data collection in single-UAV aided static sensor networks. The nodes are divided into different priority groups according to two steps: (i). increasing group and decreasing group (
Figure 2). The nodes within the decreasing group was given higher priority than the ones within the increasing group. (ii). For each group in (i), the nodes were divided into sub-groups according to which power level does it belong to. The sets of nodes within “power level 1” in the increasing group and in the decreasing group are denoted by
and
, respectively. The priority values for nodes within
and
are denoted by
and
, respectively. The authors give high priority to those nodes that are within high power level (
Figure 2), and applied opposite actions to the increasing and decreasing groups: (a) in the increasing group, the nodes within high power level was given high priority value; (b) in the decreasing group, the nodes within lower power level were given high priority. After these actions, almost all nodes at the best channel conditions have been considered.
Table 1 presents the key focuses and the key difference of our proposed algorithms from existing algorithms. Although a lot of research has been done on data collection, there is still room to enhance the network performance through balancing the dynamic parameters in the first link in mobile sensor networks.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}