A Regional NWP Tropospheric Delay Inversion Method Based on a General Regression Neural Network Model


Abstract
1. Introduction
2. Accuracy Comparison of ZTD Inverted by ECMWF/NCEP Reanalysis Data
2.1. Experimental Data
2.2. ZTD Inversion Method with NWP Data
2.3. Accuracy Comparison of ZTD Inverted from ECMWF/NCEP Reanalysis Data
3. Regional NWP Tropospheric Delay Inversion Method Based on GRNN Model
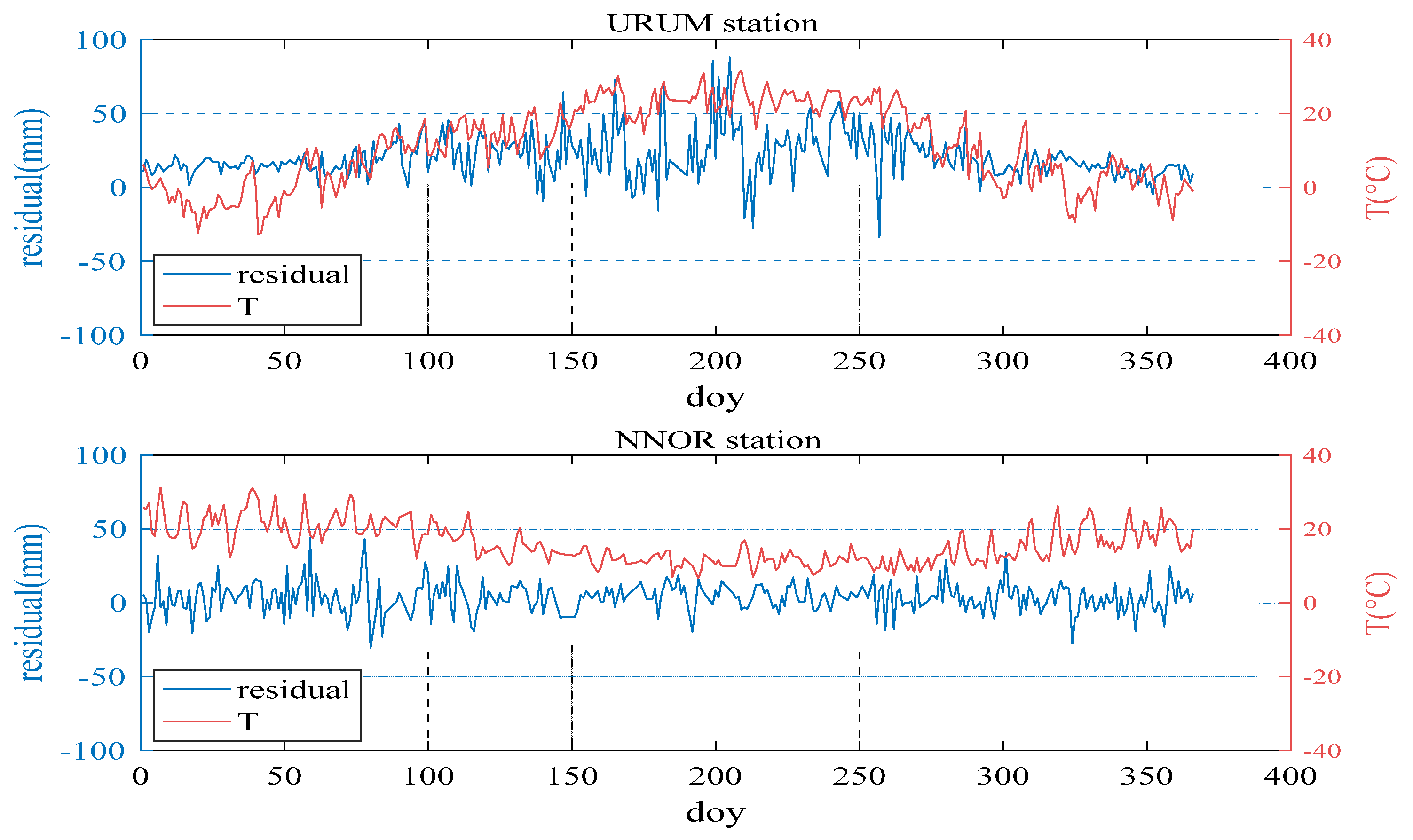
3.1. Analysis of Influencing Factors of ZTD Residuals Inverted by NWP Model
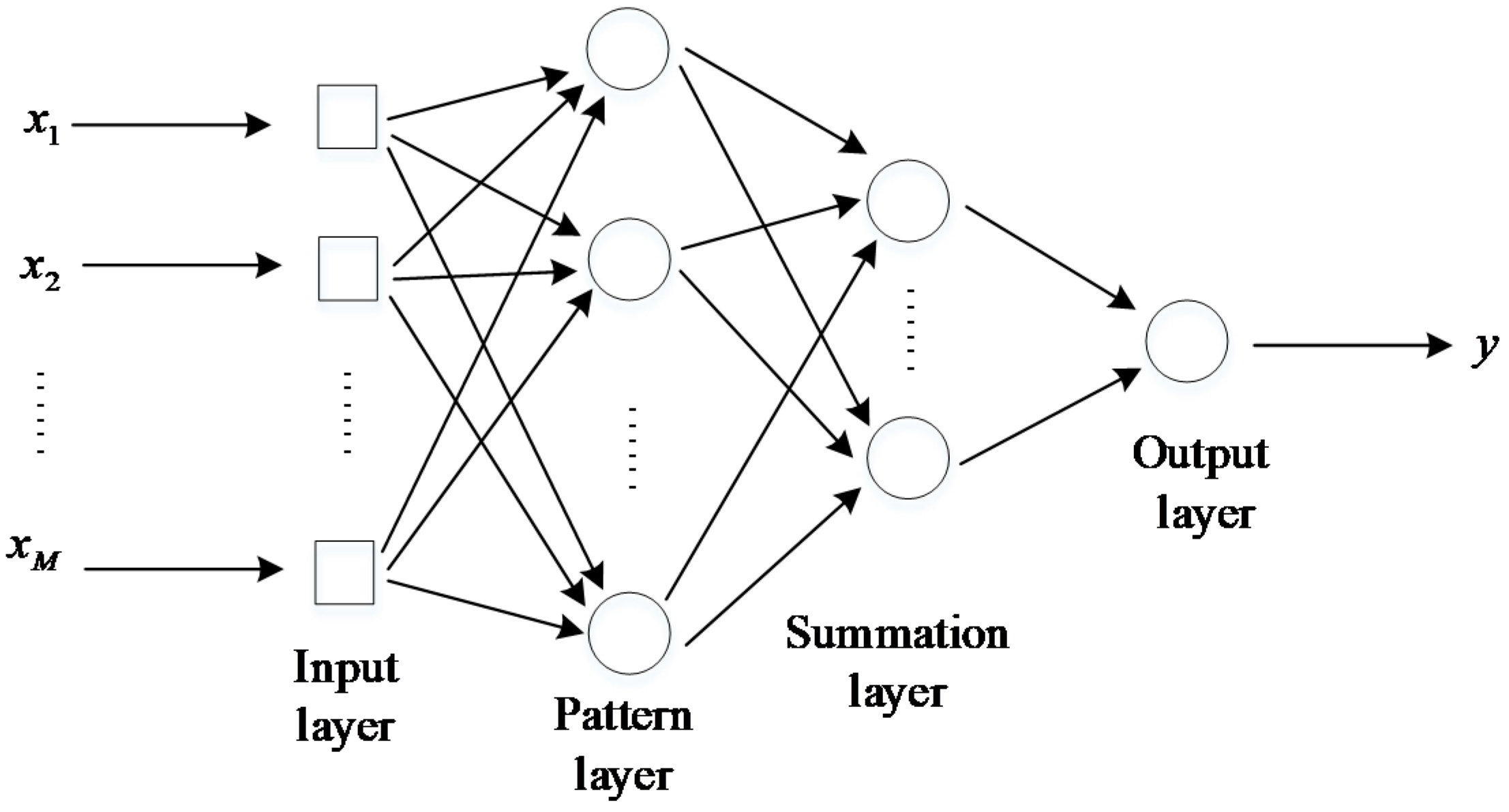
3.2. Regional NWP Tropospheric Delay Inversion Method Based on GRNN Model
4. Experiments and Analysis
4.1. The Regional NWP Tropospheric Delay Inversion Method Based on a GRNN Model Analysis
4.2. GPS RTK Results
4.2.1. GPS Medium-/Long-Range RTK Algorithm Constrained with NWP Model
4.2.2. GPS RTK Results
5. Conclusions
- The accuracy of the ZTD inverted by using the ECMWF reanalysis and by the integral method is higher than that inverted using NCEP data.
- The ZTD residual has a high correlation with the temperature, relative humidity, latitude, and season. In general, the ZTD residual is relatively high when the temperature is high; the curves of relative humidity and the ZTD residual are similar; the accuracy of the ZTD in high latitudes is higher than that in low latitudes; the variation of the ZTD residual has an inter annual variation.
- After using the GRNN model, the mean residual and RMSD of the ZTD of 550 test stations in Japan were found to be 9.5 mm and 12.7 mm, respectively, showing reductions of 20.8% and 19.1%, respectively.
- For long-range baseline (155 km and 207 km), the corrected NWP-constrained RTK show a reduction of over 43% in the initialization time compared with the standard RTK, and show a reduction of over 24% in the initialization time compared with the standard NWP-constrained RTK. In addition, the positioning precisions of both long-range baselines are better than 3 cm in the horizontal direction and better than 5 cm in the vertical direction, which satisfies the requirement of the precise positioning service.
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, B.; Teunissen, P.J.G.; Odijk, D. A Novel Un-differenced PPP-RTK Concept. J. Navig. 2011, 64, S180–S191. [Google Scholar] [CrossRef]
- Xu, Y.; Ji, S.; Chen, W.; Weng, D. A new ionosphere-free ambiguity resolution method for long-range baseline with GNSS triple-frequency signals. Adv. Space Res. 2015, 56, 1600–1612. [Google Scholar] [CrossRef]
- Hopfield, H.S. Tropospheric Effect on Electromagnetically Measured Range: Prediction from Surface Weather Data. Radio Sci. 1971, 6, 357–367. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. J. Geod. 1972, 105, 279–298. [Google Scholar] [CrossRef]
- Collins, P.; Langley, R.B. Tropospheric delay—Prediction for the WAAS user. GPS World 1999, 10, 52–58. [Google Scholar]
- Xu, Y.; Chen, W.; Li, L.; Yan, L.; Liu, M.; Wang, S. GPS/BDS Medium/Long-Range RTK Constrained with Tropospheric Delay Parameters from NWP Model. Remote. Sens. 2018, 10, 1113. [Google Scholar] [CrossRef]
- Wang, S.; Deng, J.; Ou, J.; Nie, W. Three-step Algorithm for Rapid Ambiguity Resolution between Reference Stations within Network RTK. J. Navig. 2016, 69, 1310–1324. [Google Scholar]
- Xu, Y.; Ji, S. Data quality assessment and the positioning performance analysis of BeiDou in Hong Kong. Surv. Rev. 2015, 47, 446–457. [Google Scholar] [CrossRef]
- Wielgosz, P.; Paziewski, J.D.; Krankowski, A.; Kroszczynski, K.; Figurski, M. Results of the application of tropospheric corrections from different troposphere models for precise GPS rapid static positioning. Acta Geophys. 2012, 60, 1236–1257. [Google Scholar] [CrossRef]
- Collins, J.P.; Langley, R.B. A Tropospheric Delay Model for the User of the Wide Area Augmentation System; Department of Geodesy and Geomatics Engineering, University of New Brunswick: Fredericton, NB, Canada, 1997. [Google Scholar]
- Krueger, E.; Schueler, T.; Hein, G.W.; Martellucci, A.; Blarzino, G. Galileo tropospheric correction approaches developed within GSTB-V1. In Proceedings of the ENC-GNSS 2004, Rotterdam, The Netherlands, 16–19 May 2004. [Google Scholar]
- Lagler, K.; Schindelegger, M.; Böhm, J.; Krasna, H.; Nilsson, T. GPT2: Empirical slant delay model for radio space geodetic techniques. Geophys. Res. Lett. 2013, 40, 1069–1073. [Google Scholar] [CrossRef]
- Kos, T.; Botincan, M.; Markezic, I. Evaluation of EGNOS Tropospheric Delay Model in South-Eastern Europe. J. Navig. 2009, 62, 341–349. [Google Scholar] [CrossRef]
- Huang, L.; Xie, S.; Liu, L.; Li, J.; Chen, J.; Kang, C. SSIEGNOS: A New Asian Single Site Tropospheric Correction Model. ISPRS Int. J. Geo Inf. 2017, 6, 20. [Google Scholar] [CrossRef]
- Andrei, C.-O.; Chen, R.; Andrei, O. Assessment of time-series of troposphere zenith delays derived from the Global Data Assimilation System numerical weather model. GPS Solut. 2008, 13, 109–117. [Google Scholar] [CrossRef]
- Chen, Q.; Song, S.; Heise, S.; Liou, Y.-A.; Zhu, W.-Y.; Zhao, J. Assessment of ZTD derived from ECMWF/NCEP data with GPS ZTD over China. GPS Solut. 2011, 15, 415–425. [Google Scholar] [CrossRef]
- Ghoddousi-Fard, R.; Dare, P. Comparing various GNSS neutral atmospheric delay mitigation strategies: A high latitude experiment. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation, Fort Worth, TX, USA, 26–29 September 2006; pp. 1945–1953. [Google Scholar] [CrossRef]
- Ahn, Y.W.; Lachapelle, G.; Skone, S.; Gutman, S.; Sahm, S. Analysis of GPS RTK performance using external NOAA tropospheric corrections integrated with a multiple reference station approach. GPS Solut. 2006, 10, 171–186. [Google Scholar] [CrossRef]
- Lu, C.; Zus, F.; Ge, M.; Heinkelmann, R.; Dick, G.; Wickert, J.; Schuh, H. Tropospheric delay parameters from numerical weather models for multi-GNSS precise positioning. Atmos. Meas. Tech. 2016, 9, 5965–5973. [Google Scholar] [CrossRef]
- Yuan, Y.; Holden, L.; Kealy, A.; Choy, S.; Hordyniec, P. Assessment of forecast Vienna Mapping Function 1 for real-time tropospheric delay modeling in GNSS. J. Geod. 2019, 93, 1501–1514. [Google Scholar] [CrossRef]
- Jiang, C.; Xu, T.; Wang, S.; Nie, W.; Sun, Z. Evaluation of Zenith Tropospheric Delay Derived from ERA5 Data over China Using GNSS Observations. Remote. Sens. 2020, 12, 663. [Google Scholar] [CrossRef]
- Moody, J.; Darken, C.J. Fast Learning in Networks of Locally-Tuned Processing Units. Neural Comput. 1989, 1, 281–294. [Google Scholar] [CrossRef]
- Specht, D. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef]
- Produce and Disseminate Weather Forecast Data of European Centre for Medium-Range Weather Forecasts. Available online: http://apps.ecmwf.int/datasets/ (accessed on 20 August 2018).
- National Centers for Environmental Prediction/National Weather Service/NOAA/U.S. Department of Commerce. 2000 NCEP FNL Operational Model Global Tropospheric Analyses, Continuing from July 1999. Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory, Boulder, CO, USA. Available online: http://rda.ucar.edu/datasets/ds083.2/ (accessed on 20 August 2018).
- Byun, S.H.; Bar-Sever, Y.E. A new type of troposphere zenith path delay product of the international GNSS service. J. Geod. 2009, 83, 1–7. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Dai, A.; Van Hove, T.; Van Baelen, J. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. Space Phys. 2007, 112, 11107. [Google Scholar] [CrossRef]
- Thayer, G.D. An improved equation for the radio refractive index of air. Radio Sci. 1974, 9, 803–807. [Google Scholar] [CrossRef]
- Hu, Y.; Yao, Y. An Accurate Height Reduction Model for Zenith Tropospheric Delay Correction Using ECMWF Data. In Proceedings of the Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2017; Volume 439, pp. 337–348. [Google Scholar]
- Musa, T.A.; Lim, S.; Rizos, C. Low Latitude Troposphere: A Preliminary Study Using GPS CORS Data in South East Asia. In Proceedings of the EMEA 2005 in Kanazawa, 2005 International Symposium on Environmental Monitoring in East Asia Remote Sensing and Forests, San Diego, CA, USA, 24–26 January 2005; pp. 161–175. [Google Scholar]
- Khutorov, V.E.; Teptin, G.M.; Zhuravlev, A.A.; Khutorova, O.G. Variability of the Tropospheric-Delay Temporal Structure Function of Radio Signals from the Global Navigation Satellite Systems Versus Tropospheric Surface Layer Parameters. Radiophys. Quantum Electron. 2016, 59, 352–360. [Google Scholar] [CrossRef]
- Brunner, F.K.; Welsch, W.M. Effect of the troposphere on GPS measurements. GPS World 1993, 4, 42–51. [Google Scholar]
- Kisi, O. Generalized regression neural networks for evapotranspiration modelling. Hydrol. Sci. J. 2006, 51, 1092–1105. [Google Scholar] [CrossRef]
- Kisi, O. The potential of different ANN techniques in evapotranspiration modelling. Hydrol. Process. 2008, 22, 2449–2460. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons: New York, NY, USA, 2015. [Google Scholar]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H.; Böhm, J. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, 33. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Euler, H.-J.; Schaffrin, B. On a Measure for the Discernibility between Different Ambiguity Solutions in the Static-Kinematic GPS-Mode. In International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 1991; Volume 107, pp. 285–295. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Residual/RMSD | Mean Value | Minimum Value | Maximum Value | |
|---|---|---|---|---|
| IGS-ECMWF | Residual (mm) | 13.8 | 6.3 | 26.2 |
| RMSD (mm) | 17.1 | 8.1 | 30.9 | |
| IGS-NCEP | Residual (mm) | 16.5 | 10.1 | 29.7 |
| RMSD (mm) | 20.0 | 12.3 | 33.9 | |
| Residual/RMSD | Mean Value | Minimum Value | Maximum Value | |
|---|---|---|---|---|
| Low-latitude region | Residual (mm) | 17.3 | 10.0 | 26.2 |
| RMSD (mm) | 21.7 | 12.5 | 30.9 | |
| Mid-latitude region | Residual (mm) | 13.6 | 7.4 | 21.8 |
| RMSD (mm) | 16.9 | 9.6 | 26.4 | |
| High-latitude region | Residual (mm) | 10.2 | 6.3 | 19.7 |
| RMSD (mm) | 11.8 | 8.1 | 20.9 | |
| Stations | Using GRNN or NOT | Mean | Minimum | Maximum |
|---|---|---|---|---|
| 100 training stations | before GRNN | 11.8 | 8.9 | 15.6 |
| after GRNN | 8.0 | 5.3 | 10.6 | |
| 550 test stations | before GRNN | 12.0 | 8.1 | 18.1 |
| after GRNN | 9.5 | 6.4 | 13.7 |
| Stations | Using GRNN or NOT | RMSD/SD | Mean | Minimum | Maximum |
|---|---|---|---|---|---|
| 100 training stations | before GRNN | RMSD (mm) | 15.5 | 11.6 | 20.1 |
| SD (mm) | 13.2 | 9.9 | 17.2 | ||
| After GRNN | RMSD (mm) | 10.9 | 8.1 | 13.9 | |
| SD (mm) | 10.7 | 8.1 | 13.9 | ||
| 550 test stations | before GRNN | RMSD (mm) | 15.7 | 10.6 | 23.1 |
| SD (mm) | 12.9 | 8.6 | 19.3 | ||
| After GRNN | RMSD (mm) | 12.7 | 8.5 | 17.7 | |
| SD (mm) | 12.4 | 8.3 | 17.5 |
| Baseline | Mean Times for Ambiguity Resolution (min) | ||
|---|---|---|---|
| Standard RTK | NWP-Constrained RTK | Corrected NWP-Constrained RTK | |
| 121 Km | 25.3 | 20.4 | 15.7 |
| 155 Km | 28.6 | 21.5 | 16.3 |
| 176 Km | 30.4 | 21.8 | 16.6 |
| 193 Km | 35.1 | 22.2 | 16.7 |
| 207 Km | 36.2 | 22.5 | 16.9 |
| Baseline | N | E | U |
|---|---|---|---|
| baseline: 121 km | 0.015 | 0.013 | 0.031 |
| baseline: 155 km | 0.017 | 0.013 | 0.033 |
| baseline: 176 km | 0.017 | 0.014 | 0.034 |
| baseline: 193 km | 0.019 | 0.017 | 0.036 |
| baseline: 207 km | 0.021 | 0.018 | 0.039 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Xu, Y.; Yan, L.; Wang, S.; Liu, G.; Liu, F. A Regional NWP Tropospheric Delay Inversion Method Based on a General Regression Neural Network Model. Sensors 2020, 20, 3167. https://doi.org/10.3390/s20113167
Li L, Xu Y, Yan L, Wang S, Liu G, Liu F. A Regional NWP Tropospheric Delay Inversion Method Based on a General Regression Neural Network Model. Sensors. 2020; 20(11):3167. https://doi.org/10.3390/s20113167
Chicago/Turabian StyleLi, Lei, Ying Xu, Lizi Yan, Shengli Wang, Guolin Liu, and Fan Liu. 2020. "A Regional NWP Tropospheric Delay Inversion Method Based on a General Regression Neural Network Model" Sensors 20, no. 11: 3167. https://doi.org/10.3390/s20113167
APA StyleLi, L., Xu, Y., Yan, L., Wang, S., Liu, G., & Liu, F. (2020). A Regional NWP Tropospheric Delay Inversion Method Based on a General Regression Neural Network Model. Sensors, 20(11), 3167. https://doi.org/10.3390/s20113167