A Machine Vision-Based Method for Monitoring Broiler Chicken Floor Distribution


 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Setup and Data Collection
2.2. Method for Target (Chicken) Detection
2.3. Method for Counting Broiler Chickens
2.4. Evaluation Criteria and Statistical Analysis
3. Results and Discussions
3.1. Individual Chicken Identification
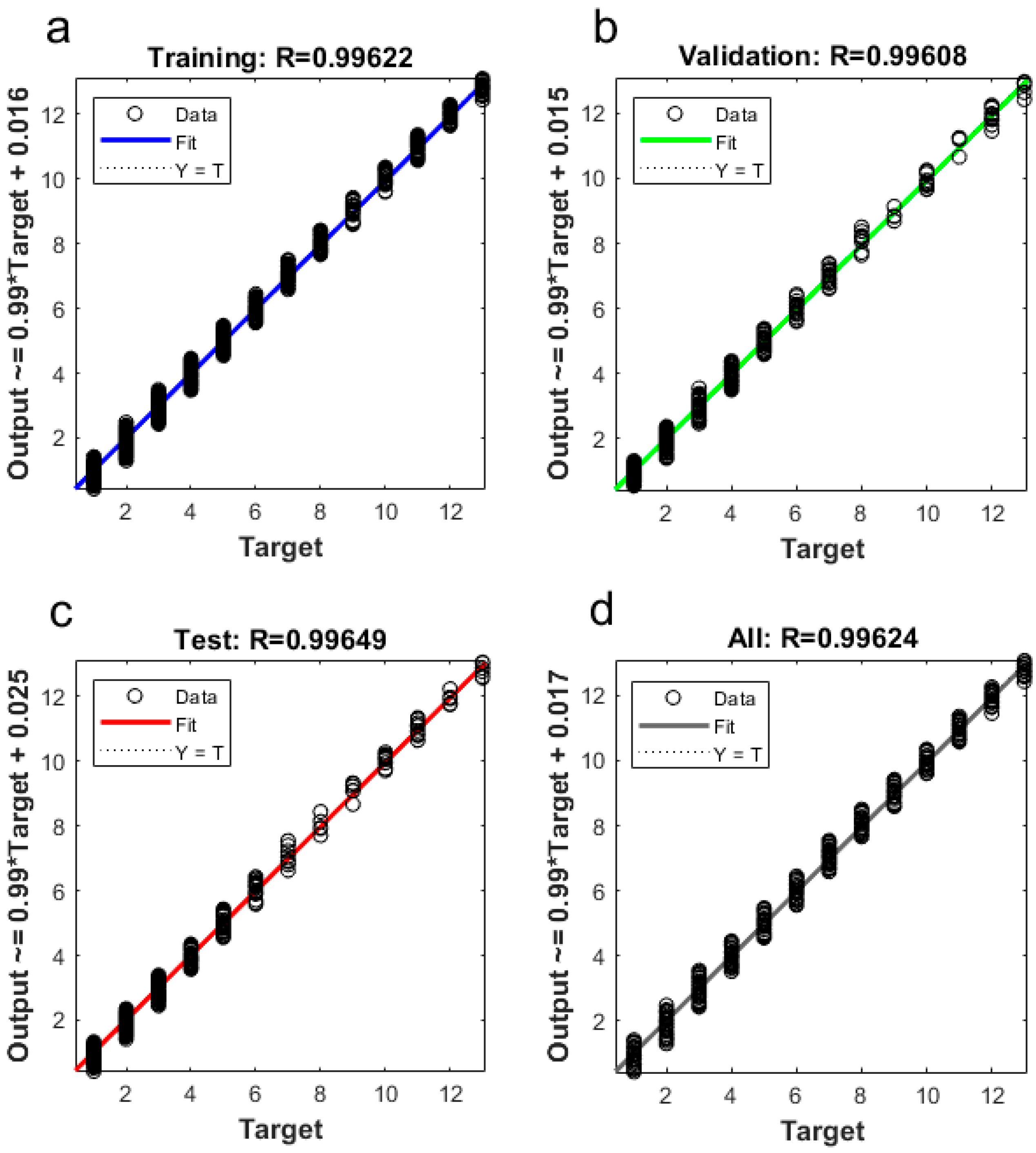
3.2. Broiler Chicken BP Model Building/Training Results
3.3. Chicken Distribution Identification with BP Model
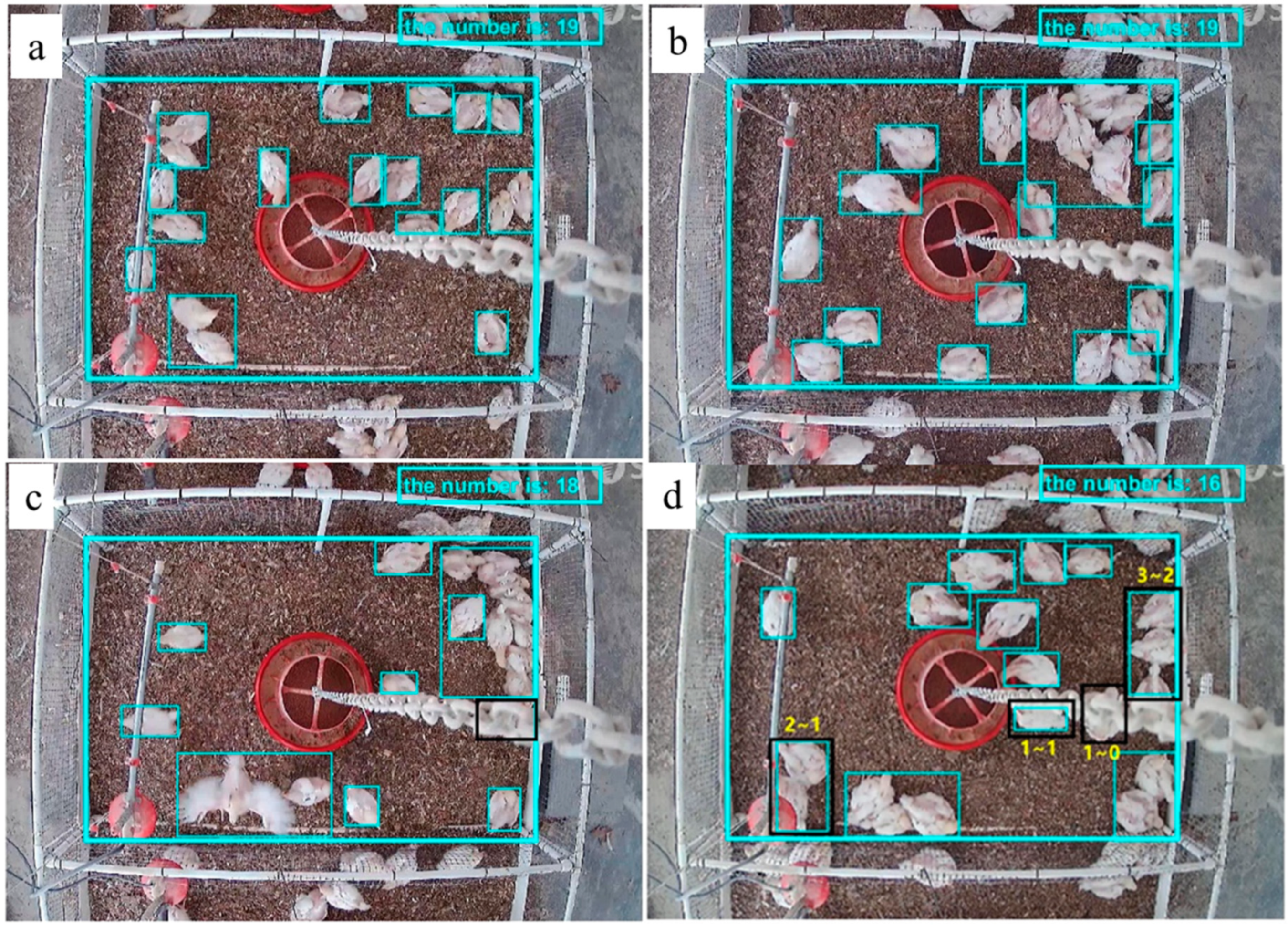
3.3.1. Total Chicken Numbers Identification
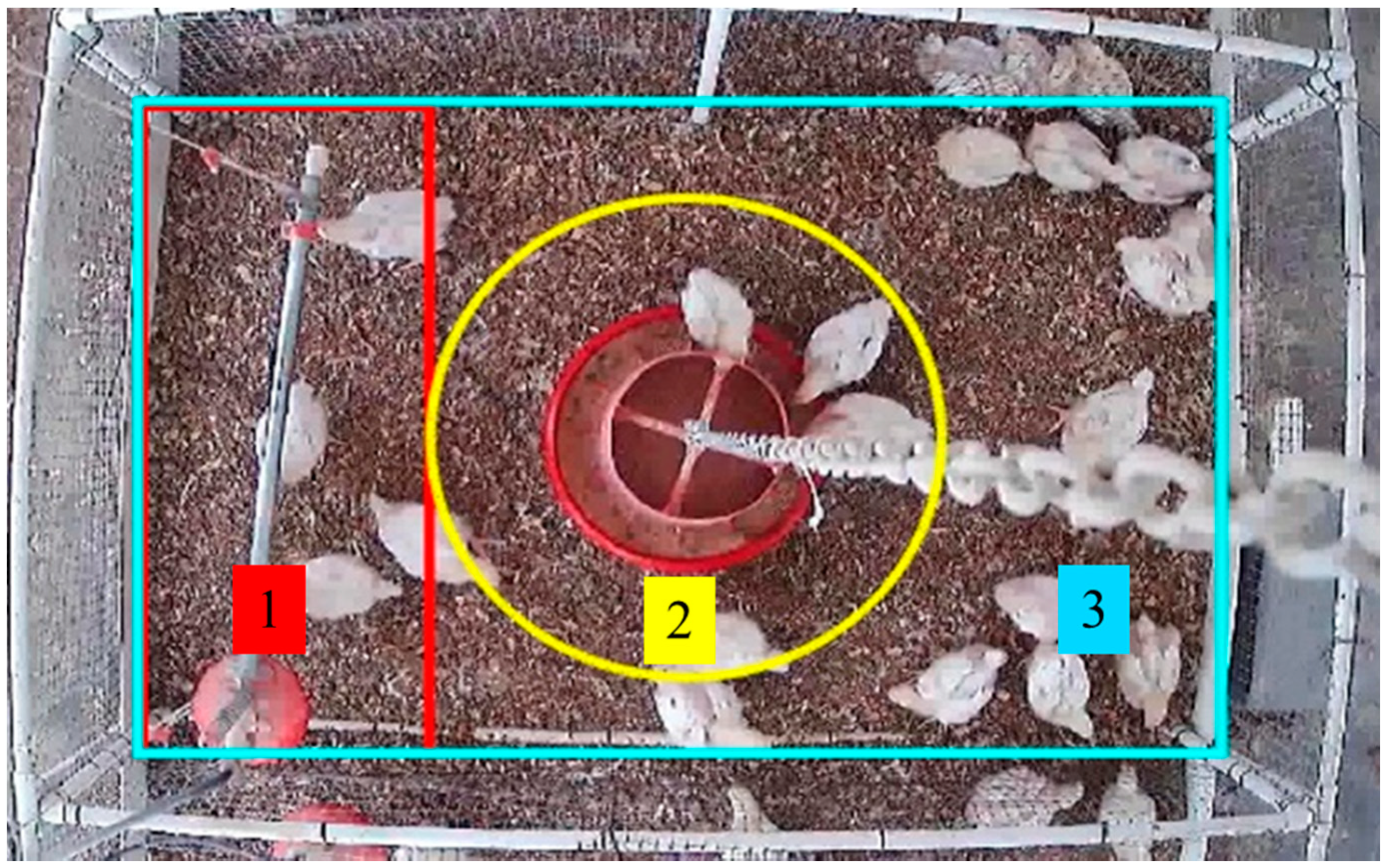
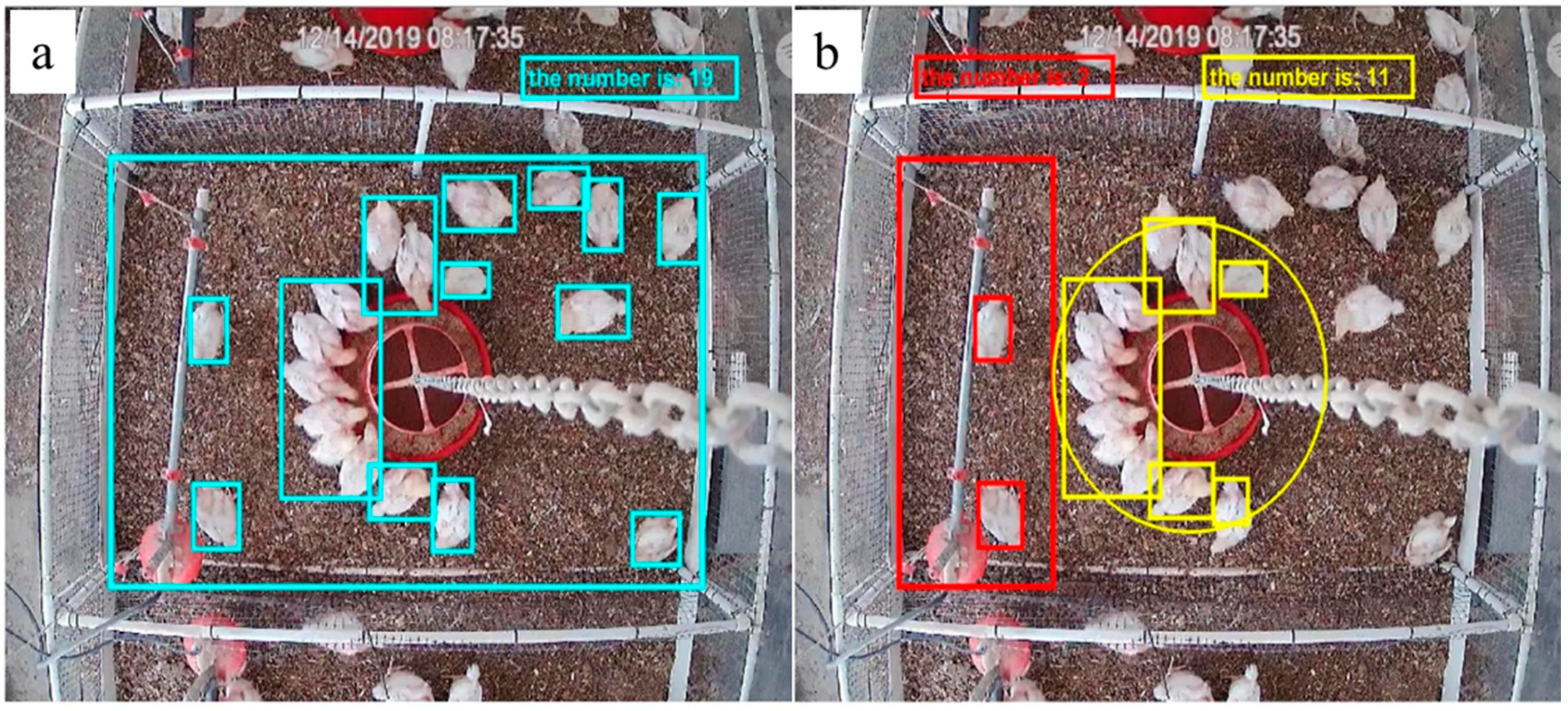
3.3.2. Chicken Distribution Identification in Drinking and Feeding Zones
4. Conclusions
- (1)
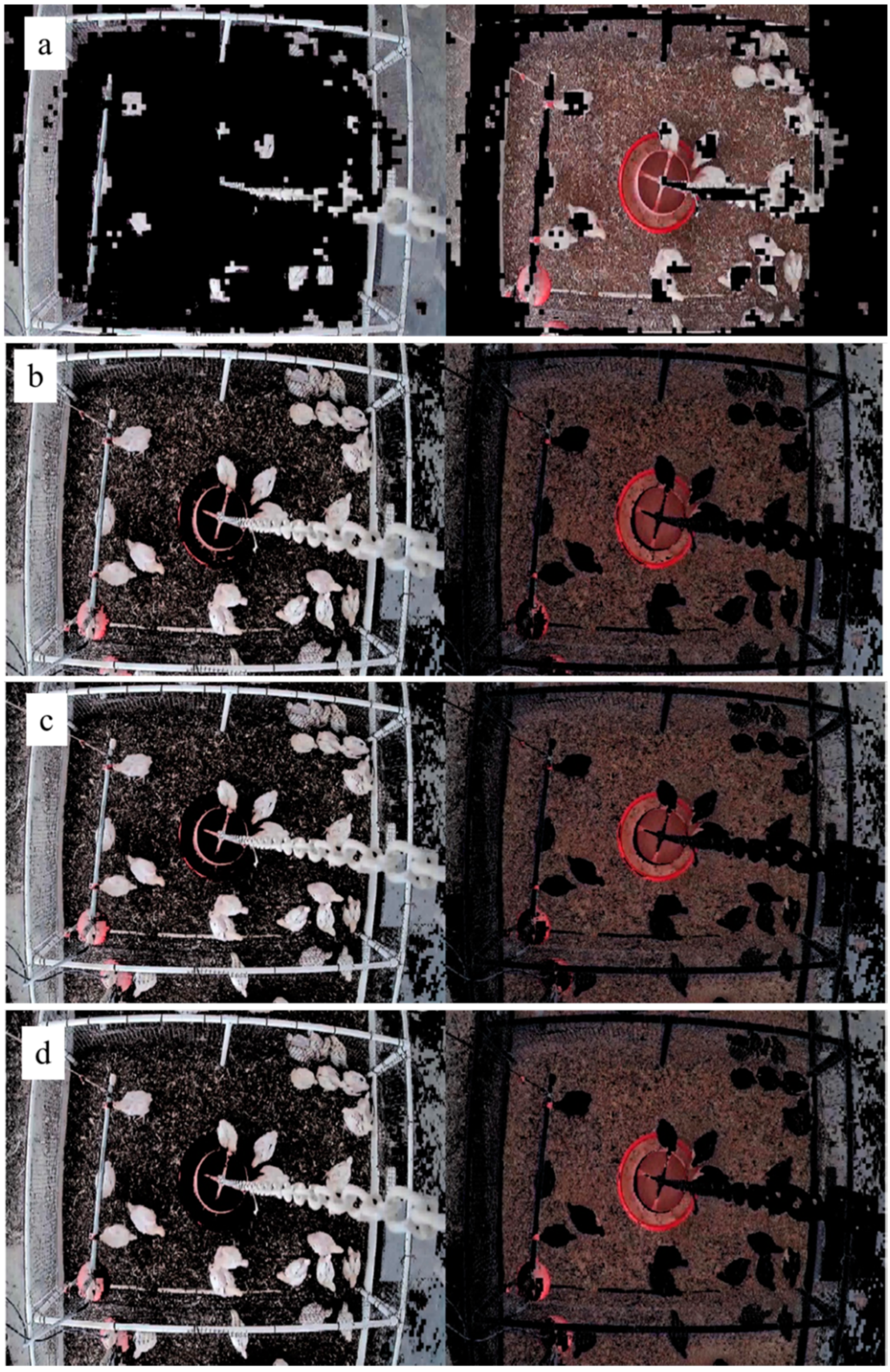
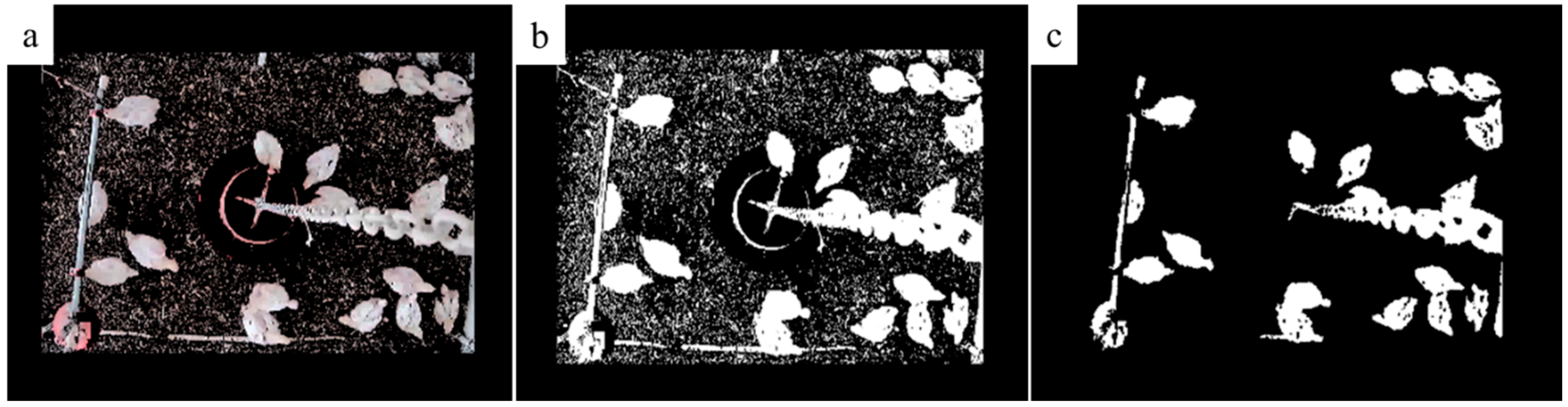
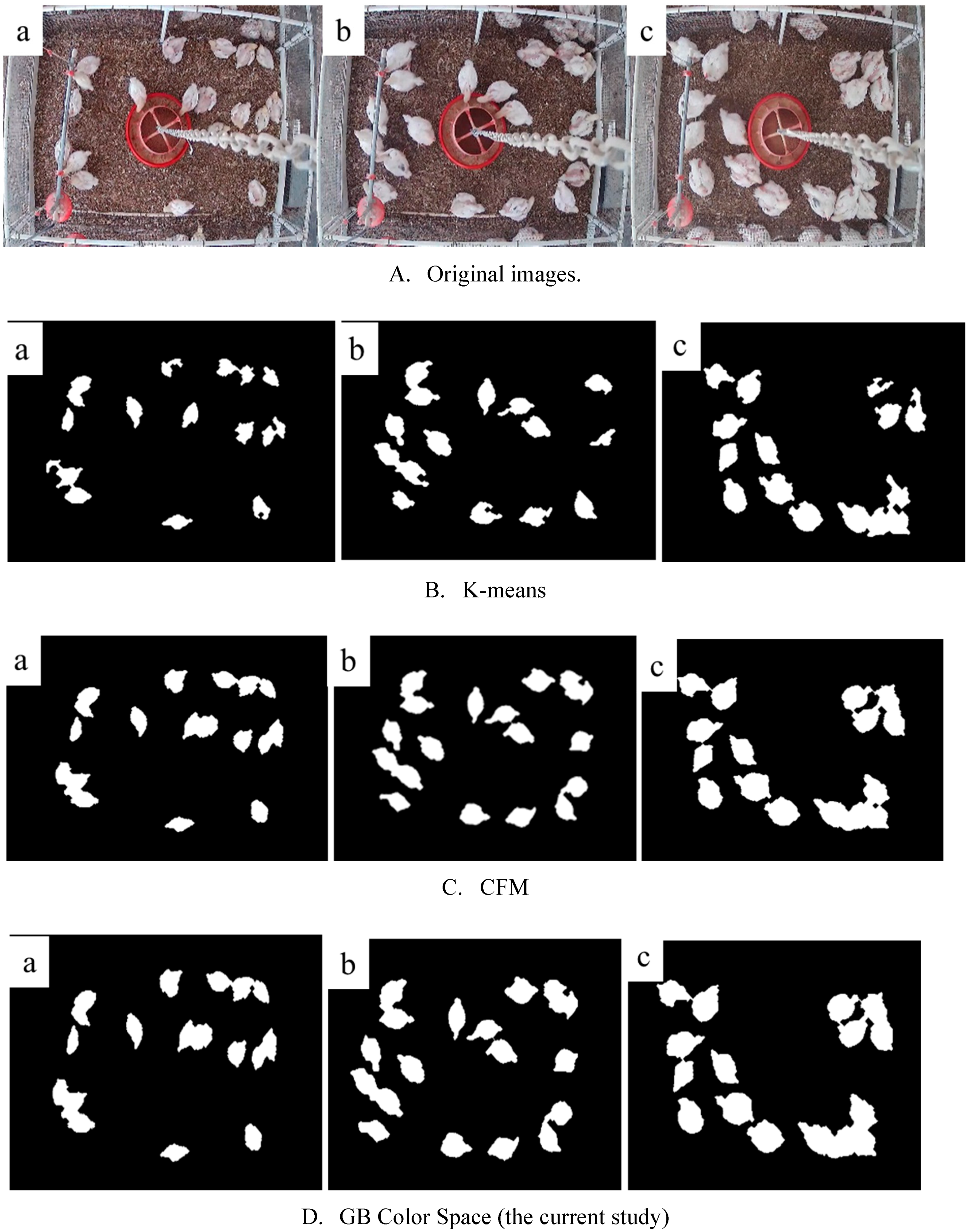
- Advanced image processing techniques of GB color space and two-dimensional Otsu processing were integrated for image processing, which has a faster clustering speed than most existing methods (e.g., K-means and FCM) (p < 0.001);
- (2)
- The BP neutral network model developed to count the total number of birds on the floor and their distribution in feeding and drinking zones had a correlation coefficient (R), mean square error (MSE), and mean absolute error (MAE) of 0.996, 0.038, and 0.178, respectively;
- (3)
- The machine vison-based method was tested with an accuracy rate of 0.9419 and 0.9544, respectively. The missed detections were primarily caused by facility interferences such as feeder hanging chains and water lines in the chicken images. These issues can be solved by using multiple cameras or a mobile imaging operation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ben Sassi, N.; Averós, X.; Estevez, I. Technology and poultry welfare. Animals 2016, 6, 62. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, K.Y.; Zhao, X.Y.; He, Y. Review on noninvasive monitoring technology of poultry behavior and physiological information. Trans. Chin. Soc. Agr. Eng. 2017, 33, 197–209. [Google Scholar]
- Li, N.; Ren, Z.; Li, D.; Zeng, L. Automated techniques for monitoring the behaviour and welfare of broilers and laying hens: Towards the goal of precision livestock farming. Animal 2020, 14, 617–625. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aydin, A.; Cangar, O.; Ozcan, S.E.; Bahr, C.; Berckmans, D. Application of a fully automatic analysis tool to assess the activity of broiler chickens with different gait scores. Comput. Electron. Agr. 2010, 73, 194–199. [Google Scholar] [CrossRef]
- Porto, S.M.; Arcidiacono, C.; Anguzza, U.; Cascone, G. The automatic detection of dairy cow feeding and standing behaviours in free-stall barns by a computer vision-based system. Biosyst. Eng. 2015, 133, 46–55. [Google Scholar] [CrossRef]
- Lao, F.D.; Teng, G.H.; Li, J.; Yu, L.; Li, Z. Behavior recognition method for individual laying hen based on computer vision. Trans. Chin. Soc. Agr. Eng. 2012, 28, 157–163. [Google Scholar]
- Lao, F.D.; Du, X.D.; Teng, G.H. Automatic Recognition Method of Laying Hen Behaviors Based on Depth Image Processing. Trans. Chin. Soc. Agr. Eng. 2017, 48, 155–162. [Google Scholar]
- Guo, Y.; He, D.; Chai, L. A Machine Vision-Based Method for Monitoring Scene-Interactive Behaviors of Dairy Calf. Animals 2020, 10, 190. [Google Scholar] [CrossRef] [Green Version]
- Pereira, D.F.; Miyamoto, B.C.; Maia, G.D.; Sales, G.T.; Magalhães, M.M.; Gates, R.S. Machine vision to identify broiler breeder behavior. Comput. Electron. Agr. 2013, 99, 194–199. [Google Scholar] [CrossRef]
- Aydin, A. Development of an early detection system for lameness of broilers using computer vision. Comput. Electron. Agr. 2017, 136, 140–146. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, Z.; He, D.; Niu, J.; Tan, Y. Detection of cow mounting behavior using region geometry and optical flow characteristics. Comput. Electron. Agr. 2019, 163, 104828. [Google Scholar] [CrossRef]
- Viazzi, S.; Ismayilova, G.; Oczak, M.; Sonoda, L.T.; Fels, M.; Guarino, M.; Vranken, E.; Hartung, J.; Bahr, C.; Berckmans, D. Image feature extraction for classification of aggressive interactions among pigs. Comput. Electron. Agr. 2014, 104, 57–62. [Google Scholar] [CrossRef]
- Aydin, A. Using 3D vision camera system to automatically assess the level of inactivity in broiler chickens. Comput. Electron. Agr. 2017, 135, 4–10. [Google Scholar] [CrossRef]
- Lu, M.; Norton, T.; Youssef, A.; Radojkovic, N.; Fernández, A.P.; Berckmans, D. Extracting body surface dimensions from top-view images of pigs. Int. J. Agr. Biol. Eng. 2018, 11, 182–191. [Google Scholar] [CrossRef] [Green Version]
- Mortensen, A.K.; Lisouski, P.; Ahrendt, P. Weight prediction of broiler chickens using 3D computer vision. Comput. Electron. Agr. 2016, 123, 319–326. [Google Scholar] [CrossRef]
- Leroy, T.; Vranken, E.; Van Brecht, A.; Struelens, E.; Sonck, B.; Berckmans, D. A computer vision method for on-line behavioral quantification of individually caged poultry. Trans. ASABE 2006, 49, 795–802. [Google Scholar] [CrossRef]
- Fernandez, A.P.; Norton, T.; Tullo, E.; van Hertem, T.; Youssef, A.; Exadaktylos, V.; Vranken, E.; Guarino, M.; Berckmans, D. Real-time monitoring of broiler flock’s welfare status using camera-based technology. Biosyst. Eng. 2018, 173, 103–114. [Google Scholar] [CrossRef]
- Pu, H.; Lian, J.; Fan, M. Automatic recognition of flock behavior of chickens with convolutional neural network and kinect sensor. Int. J. Pattern Recogn. 2018, 32, 1850023. [Google Scholar] [CrossRef]
- Dawkins, M.S.; Cain, R.; Merelie, K.; Roberts, S.J. In search of the behavioural correlates of optical flow patterns in the automated assessment of broiler chicken welfare. Appl. Anim. Behave. Sci. 2013, 145, 44–50. [Google Scholar] [CrossRef]
- Li, L.; Zhao, Y.; Oliveira, J.; Verhoijsen, W.; Liu, K.; Xin, H. A UHF RFID system for studying individual feeding and nesting behaviors of group-housed laying hens. Trans. ASABE 2017, 60, 1337–1347. [Google Scholar] [CrossRef] [Green Version]
- Nakarmi, A.D.; Tang, L.; Xin, H. Automated tracking and behavior quantification of laying hens using 3D computer vision and radio frequency identification technologies. Trans. ASABE 2014, 57, 1455–1472. [Google Scholar]
- Dawkins, M.S.; Lee, H.J.; Waitt, C.D.; Roberts, S.J. Optical flow patterns in broiler chicken flocks as automated measures of behaviour and gait. Appl. Anim. Behav. Sci. 2009, 119, 203–209. [Google Scholar] [CrossRef]
- Dawkins, M.S.; Cain, R.; Roberts, S.J. Optical flow, flock behaviour and chicken welfare. Anim. Behav. 2012, 84, 219–223. [Google Scholar] [CrossRef]
- Kashiha, M.; Pluk, A.; Bahr, C.; Vranken, E.; Berckmans, D. Development of an early warning system for a broiler house using computer vision. Biosyst. Eng. 2013, 116, 36–45. [Google Scholar] [CrossRef]
- Li, J.; Cheng, J.H.; Shi, J.Y.; Huang, F. Brief introduction of back propagation (BP) neural network algorithm and its improvement. In Proceedings of the Advances in Computer Science and Information Engineering, Zhengzhou, China, 19–20 May 2012. [Google Scholar]
- Wang, C.Z.; Wang, D.; Zhang, H.H.; Zhang, Y. Research on pig’s behavior recognition based on attitude angle. J. Yangzhou Univ. 2016, 37, 43–48. [Google Scholar]
- Wang, H.W.; Yin, Y.H.; Liu, Y.G. Apply BP neural network on synthesis evaluation of living pig. Microelectron. Comput. 2006, 12, 33. [Google Scholar]
- Zheng, L.M.; Tian, L.j.; Zhu, H.; Wang, W.; Yu, B.; Liu, Y.G.; Lin, Z.; Tang, Y. Study on pork grade evaluation of BP neural network based on MATLAB. Appl. Res. Comput. 2008, 25, 1642–1644. [Google Scholar]
- Wang, L.; Sun, C.H.; Li, W.Y.; Ji, Z.T.; Zhang, X.; Wang, Y.Z.; Lei, P.; Yang, X.T. Establishment of broiler quality estimation model based on depth image and BP neural network. Trans. Chin. Soc. Agr. Eng. 2017, 33, 199–205. [Google Scholar]
- Fan, J.L.; Zhao, F. Two-dimensional Otsu’s curve thresholding segmentation method for gray-level images. Acta. Electron. Sin. 2007, 35, 751. [Google Scholar]
- Ray, S.; Turi, R.H. Determination of number of clusters in k-means clustering and application in colour image segmentation. In Proceedings of the 4th International Conference on Advances in Pattern Recognition and Digital Techniques, New Delhi, India, 27–29 December 1999; pp. 137–143. [Google Scholar]
- Chuang, K.S.; Tzeng, H.L.; Chen, S.; Wu, J.; Chen, T.J. Fuzzy c-means clustering with spatial information for image segmentation. Comput. Med. Imag. Grap. 2006, 30, 9–15. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Zhao, Y.; Chesser, G.D.; Lowe, J.W.; Purswell, J.L. Image processing for analyzing broiler feeding and drinking behaviors. In Proceedings of the 2019 ASABE Annual International Meeting (p. 1), Boston, MA, USA, 7–10 July 2019. [Google Scholar]
- Xu, H.F.; Chen, H.Y.; Yuan, K. A BP Neural Network-Based Automatic Windshield Wiper Controller. Adv. Mater. Res. 2012, 482, 31–34. [Google Scholar] [CrossRef]
- Chai, L.; Xin, H.; Oliveira, J.; Wang, Y.; Wang, K.; Zhao, Y. Dust suppression and heat stress relief in cage-free hen housing. In Proceedings of the 10th International Livestock Environment Symposium (ILES X) (Paper No. ILES18-012), Omaha, NE, USA, 25–27 September 2018. [Google Scholar]
- Chai, L.; Xin, H.; Wang, Y.; Oliveira, J.; Wang, K.; Zhao, Y. Mitigating particulate matter generations of a commercial cage-free henhouse. Trans. ASABE 2019, 62, 877–886. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Images Clustering Running Time (s, Mean ± SD, n = 30) | ||
|---|---|---|---|
| d18 | d24 | d30 | |
| K-means | 5.17 ± 0.69 | 5.04 ± 0.66 | 5.31 ± 0.87 |
| FCM 1 | 16.79 ± 1.26 | 14.93 ± 0.86 | 12.99 ± 0.81 |
| This study 2 | 0.24 ± 0.04 | 0.26 ± 0.03 | 0.24 ± 0.04 |
| Zone | True Chickens 1 | Detected Chickens 2 | Missed Detections [3] | False Detections | Rac | Rmiss | Rfalse | ||
|---|---|---|---|---|---|---|---|---|---|
| Crowding | Occlusion | Others | |||||||
| Drinking | 671 | 632 | 8 | 32 | 2 | 3 | 0.9419 | 0.0626 | 0.0045 |
| Feeding | 823 | 785 | 8 | 26 | 7 | 3 | 0.9544 | 0.0498 | 0.0037 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Chai, L.; Aggrey, S.E.; Oladeinde, A.; Johnson, J.; Zock, G. A Machine Vision-Based Method for Monitoring Broiler Chicken Floor Distribution. Sensors 2020, 20, 3179. https://doi.org/10.3390/s20113179
Guo Y, Chai L, Aggrey SE, Oladeinde A, Johnson J, Zock G. A Machine Vision-Based Method for Monitoring Broiler Chicken Floor Distribution. Sensors. 2020; 20(11):3179. https://doi.org/10.3390/s20113179
Chicago/Turabian StyleGuo, Yangyang, Lilong Chai, Samuel E. Aggrey, Adelumola Oladeinde, Jasmine Johnson, and Gregory Zock. 2020. "A Machine Vision-Based Method for Monitoring Broiler Chicken Floor Distribution" Sensors 20, no. 11: 3179. https://doi.org/10.3390/s20113179
APA StyleGuo, Y., Chai, L., Aggrey, S. E., Oladeinde, A., Johnson, J., & Zock, G. (2020). A Machine Vision-Based Method for Monitoring Broiler Chicken Floor Distribution. Sensors, 20(11), 3179. https://doi.org/10.3390/s20113179