A Sheaf Theoretical Approach to Uncertainty Quantification of Heterogeneous Geolocation Information

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Section 2 provides context around the history of target tracking methodologies and multi-sensor fusion, including the particular role we are advocating specifically for sheaf methods.
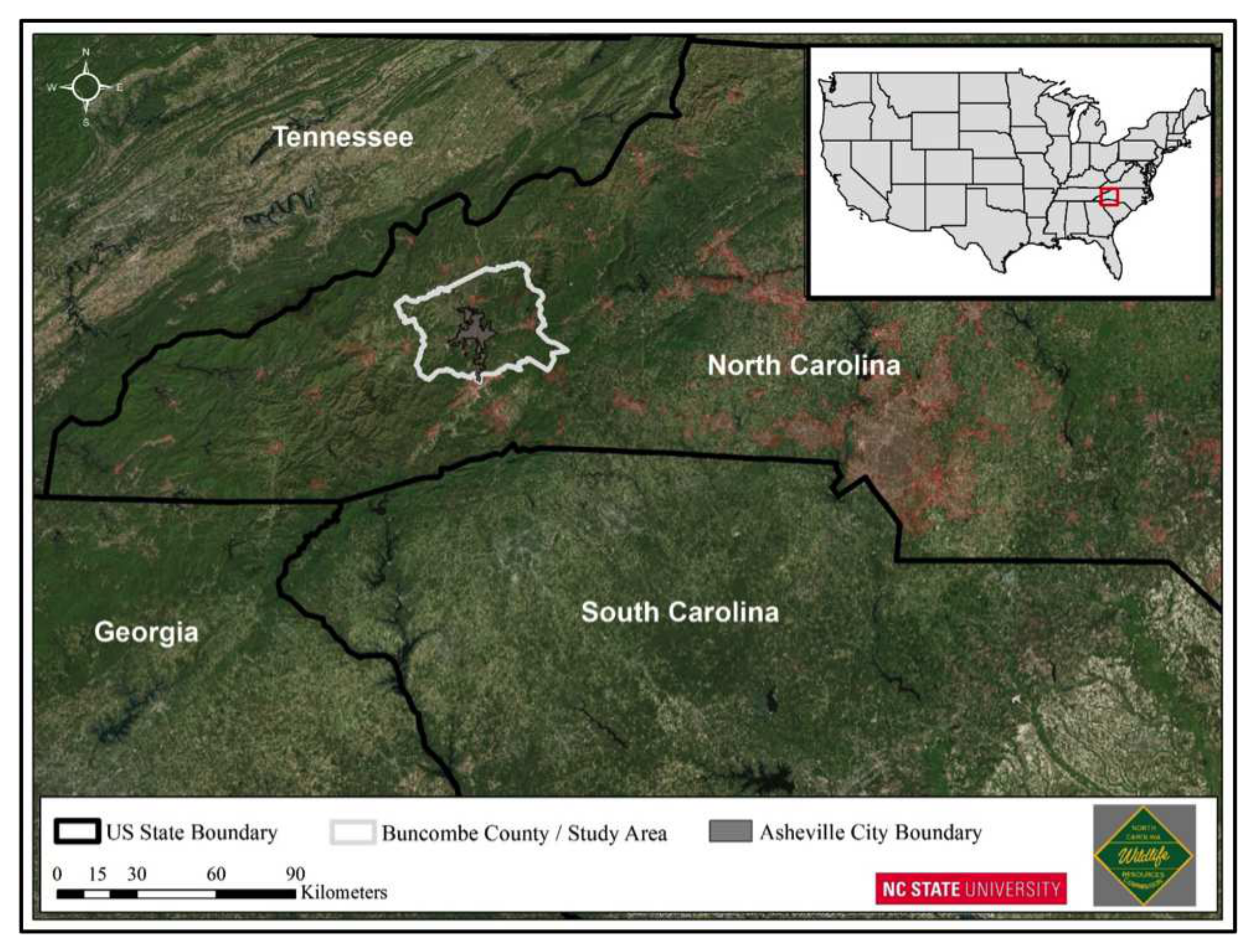
- Then in Section 3 we describe the experimental setup for our data collection effort regarding tracking black bears in Asheville, North Carolina. This involved four sensors deployed among the bears, several “dummy” bear collars deployed at fixed locations in the field, and team of scientists charged with tracking their location. This experiment was designed specifically to identify a real tracking task where multi-sensor integration is required, but where the system complexity is not so large as to overwhelm the methodological development and demonstration, while still being sufficiently complexity to demonstrate the value of sheaf-based methods.
- Section 4 continues with a detailed mathematical development of the sheaf-based tracking model. This includes several features novel to information fusion models, including the explicit initial attention to the complexity of sensor interaction in the core sheaf models, but then the ability to equip these models with uncertainty tolerance in the form of approximate sections, and then to measure that both globally via a consistency radius and also at a more fine-grained level in terms of specific sensor dependencies in terms of a consistency filtration.
- Section 5 shows several aspects of our models interpreted through the measured data. First, overall results in terms of bear and dummy collars is provided; then results for a particular bear collar are examined in detail; and finally results for a particular time point in the measured data set is shown to illustrate the consistency filtration in particular.
- While our sheaf models are novel, we sought to compare them to a more traditional modeling approach, introduced in Section 6. Specifically, a statistical approach was developed to process the data once registered into a common coordinate system, a dynamic linear model which was estimated using a Kalman filter. This approach also recovered bear and human locations and sensor accuracies. Comparisons in both form and results are obtained, which demonstrate the role that sheaves as generic integration models can play in conjunction with specific modeling approaches such as these: as noted, all integration models will provably recapitulate some portion of sheaf theory [2], even if they are not first registered into a common coordinate system.
- We conclude in Section 7 with some general observations and discussion.
2. History and Context
2.1. Target Tracking Methods
2.2. Multi-Sensor Fusion Methods
2.3. Sheaf Geometry for Fusion
3. Tracking Experiment
3.1. Black Bear Study Capture and Monitoring Methodology
3.2. Tracking Exercise
4. Sheaf Modeling Methodology
4.1. Simplicial Sheaf Models
- The GPS reading on the Bear Collar, denoted G;
- The Radio VHF Device receiver, denoted R;
- The report, denoted T; and
- The Vehicle GPS, denoted V.
- a set to each face δ of Δ (called the stalk at δ), and
- a function (called the restriction map from γ to δ) to each inclusion of faces , which obeys
4.2. Consistency Structures, Pseudosections, and Approximate Sections
- , and
- for all .
- , and
- for all .
- , and
- for all .
4.3. Maximal Consistent Subcomplexes
- The assignment α is consistent on each , and any subcomplex on which α is consistent has some as a supercomplex.
- is a cover of Δ.
- for all i.
- Every subcomplex on which α is consistent has some as a supercomplex.
- is a cover of Δ.
4.4. Measures on Consistent Subcomplexes
4.5. Consistency Filtrations
5. Results
5.1. Overall Measurements
5.2. Example: Bear N024
5.3. Example: Minute 5.41
- There is a landmark non-zero consistency value which does not exceed the consistency radius;
- There is a prior set of consistent faces ;
- A new consistent face is added so that ;
- There is a corresponding vertex cover , which is a coarsening of the prior ;
- And which has a cover measure .
- :
- If we insist that no error be tolerated, that is that all data be consistent, then any nontrivial set in the vertex cover, produced by Theorem 2, cannot contain nontrivial faces of . As such, the set of consistent faces are just the singletons , and the vertex cover is , with .
- :
- If we relax our error threshold to the next landmark value, while still well below our consistency radius, the readings on V and R are considered consistent within this tolerance, so that the face is added, yielding the new set of consistent facesThe new vertex cover is , with cover measure .
- :
- Continuing on, next T and R come into consistency, adding the face , yielding
- :
- The next landmark introduces the three-way interaction (for notational simplicity just note that ). However, the vertex cover is unchanged, yielding and .
- :
- Next T and V are reconciled, adding to . Now , with .
- :
- Finally we arrive at our consistency radius with the bear collar G being reconciled to R adding the face to . Our vertex cover is naturally now the coarsest, i.e., just the set of vertices as a whole, with .
6. Comparison Statistical Model
- Estimate the locations, with corresponding uncertainties, over time of the bear collar and the human (see Figures 18 and 19 below).
- Estimate accuracy parameters of the involved sensors based on each of the single runs of the experiment (see Table 5 below).
- Combine information across the multiple experimental runs to estimate the accuracy of the sensors (see Equation (5) below).
6.1. High-Level State and Observation Equations - With Examples
6.2. Estimation of Parameters
6.3. Example Outputs
6.4. Comparisons
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Robinson, M. Topological Signal Processing; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Robinson, M. Sheaves are the canonical datastructure for information integration. Inf. Fusion 2017, 36, 208–224. [Google Scholar] [CrossRef] [Green Version]
- Luo, W.; Xing, J.; Zhang, X.; Zhao, X.; Kim, T.K. Multiple Object Tracking: A Literature Review. arXiv 2014, arXiv:1409.7618. [Google Scholar]
- Pulford, G. Taxonomy of multiple target tracking methods. IEE Proc. Radar Sonar Navig. 2005, 152, 291–304. [Google Scholar] [CrossRef]
- DeGroot, M.H. Optimal Statistical Decisions; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Deming, R.; Schindler, J.; Perlovsky, L. Multi-target/multi-sensor tracking using only range and doppler measurements. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 593–611. [Google Scholar] [CrossRef]
- Efe, M.; Ruan, Y.; Willett, P. Probabilisitc multi-hypothesis tracker: Addressing some basic issues. IEE Proc. Radar Sonar Navig. 2004, 151, 189–196. [Google Scholar] [CrossRef]
- Hamid Rezatofighi, S.; Milan, A.; Zhang, Z.; Shi, Q.; Dick, A.; Reid, I. Joint Probabilistic Data Association Revisited. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 3047–3055. [Google Scholar]
- Berclaz, J.; Fleuret, F.; Turetken, E.; Fua, P. Multiple Object Tracking Using K-Shortest Paths Optimization. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1806–1819. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Butt, A.; Collins, R. Multi-target tracking by lagrangian relaxation to min-cost network flow. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1846–1853. [Google Scholar]
- Pirsiavash, H.; Ramanan, D.; Fowlkes, C.C. Globally-optimal greedy algorithms for tracking a variable number of objects. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 20–25 June 2011; pp. 1201–1208. [Google Scholar]
- Perera, A.A.; Srinivas, C.; Hoogs, A.; Brooksby, G.; Hu, W. Multi-object tracking through simultaneous long occlusions and split-merge conditions. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; pp. 666–673. [Google Scholar]
- Zhang, L.; Li, Y.; Nevatia, R. Global data association for multi-object tracking using network flows. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Milan, A.; Gade, R.; Dick, A.; Moeslund, T.B.; Reid, I. Improving Global Multi-target Tracking with Local Updates. In Computer Vision - ECCV 2014 Workshops: Zurich, Switzerland, September 6–7 and 12, 2014, Proceedings, Part III; Agapito, L., Bronstein, M.M., Rother, C., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 174–190. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Wang, G.; Chan, K.; Wang, L. Tracklet association with online target-specific metric learning. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1234–1241. [Google Scholar]
- Ben Shitrit, H.; Berclaz, J.; Fleuret, F.; Fua, P. Multi-commodity network flow for tracking multiple people. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1614–1627. [Google Scholar] [CrossRef]
- Wald, L. Some terms of reference in data fusion. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1190–1193. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Shao, L.; Zheng, F.; Wang, L.; Song, Z. Recent advances and trends in visual tracking: A review. Neurocomputing 2011, 74, 3823–3831. [Google Scholar] [CrossRef]
- Leal-Taixé, L.; Milan, A.; Reid, I.; Roth, S.; Schindler, K. Motchallenge 2015: Towards a benchmark for multi-target tracking. arXiv 2015, arXiv:1504.01942. [Google Scholar]
- Solera, F.; Calderara, S.; Cucchiara, R. Towards the evaluation of reproducible robustness in tracking-by-detection. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance, Karlsruhe, Germany, 25–28 August 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Bailer, C.; Pagani, A.; Stricker, D. A Superior Tracking Approach: Building a Strong Tracker through Fusion. In Computer Vision – ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014, Proceedings, Part VII; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 170–185. [Google Scholar] [CrossRef] [Green Version]
- Hall, D.L.; McMullen, S.A. Mathematical Techniques in Multisensor Data Fusion; Artech House: Norwood, MA, USA, 2004. [Google Scholar]
- Newman, A.J.; Mitzel, G.E. Upstream data fusion: History, technical overview, and applications to critical challenges. Johns Hopkins APL Tech. Digest 2013, 31, 215–233. [Google Scholar]
- Smith, D.; Singh, S. Approaches to multisensor data fusion in target tracking: A survey. IEEE Trans. Knowl. Data Eng. 2006, 18, 1696–1710. [Google Scholar] [CrossRef]
- Zhu, S.; Guo, Y.; Chen, J.; Li, D.; Cheng, L. Integrating Optimal Heterogeneous Sensor Deployment and Operation Strategies for Dynamic Origin-Destination Demand Estimation. Sensors 2017, 17, 1767. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alparone, L.; Aiazzi, B.; Baronti, S.; Garzelli, A.; Nencini, F.; Selva, M. Multispectral and panchromatic data fusion assessment without reference. Photogramm. Eng. Remote Sens. 2008, 74, 193–200. [Google Scholar] [CrossRef] [Green Version]
- Varshney, P.K. Multisensor data fusion. Electron. Commun. Eng. J. 1997, 9, 245–253. [Google Scholar] [CrossRef]
- Zhang, J. Multi-source remote sensing data fusion: Status and trends. Int. J. Image Data Fusion 2010, 1, 5–24. [Google Scholar] [CrossRef] [Green Version]
- Dawn, S.; Saxena, V.; Sharma, B. Remote Sensing Image Registration Techniques: A Survey. In Proceedings of the Image and Signal Processing: 4th International Conference, ICISP 2010, Trois-Rivières, QC, Canada, 30 June–2 July 2010; Elmoataz, A., Lezoray, O., Nouboud, F., Mammass, D., Meunier, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 103–112. [Google Scholar] [CrossRef] [Green Version]
- Guo, Z.; Sun, G.; Ranson, K.; Ni, W.; Qin, W. The Potential of Combined LIDAR and SAR Data in Retrieving Forest Parameters using Model Analysis. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar]
- Koetz, B.; Sun, G.; Morsdorf, F.; Ranson, K.; Kneubühler, M.; Itten, K.; Allgöwer, B. Fusion of imaging spectrometer and LIDAR data over combined radiative transfer models for forest canopy characterization. Remote Sens. Environ. 2007, 106, 449–459. [Google Scholar] [CrossRef]
- Benferhat, S.; Sossai, C. Reasoning with multiple-source information in a possibilistic logic framework. Inf. Fusion 2006, 7, 80–96. [Google Scholar] [CrossRef]
- Benferhat, S.; Titouna, F. Fusion and normalization of quantitative possibilistic networks. Appl. Intell. 2009, 31, 135–160. [Google Scholar] [CrossRef]
- Crowley, J.L. Principles and techniques for sensor data fusion. In Multisensor Fusion for Computer Vision; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Yue, Y.; Yang, C.; Wang, Y.; Senarathne, P.G.C.N.; Zhang, J.; Wen, M.; Wang, D. A Multilevel Fusion System for Multirobot 3-D Mapping Using Heterogeneous Sensors. IEEE Syst. J. 2020, 14, 1341–1352. [Google Scholar] [CrossRef]
- Hurley, J.D.; Johnson, C.; Dunham, J.; Simmons, J. Multilevel probabilistic target identification methodology utilizing multiple heterogeneous sensors providing various levels of target characteristics. In Signal Processing, Sensor/Information Fusion, and Target Recognition XXVII; International Society for Optics and Photonics: Orlando, FL, USA, 2018; Volume 10646, p. 106461M. [Google Scholar]
- Malcolm, G. Sheaves, objects, and distributed systems. Electron. Notes Theor. Comput. Sci. 2009, 225, 3–19. [Google Scholar] [CrossRef] [Green Version]
- Bacławski, K. Whitney numbers of geometric lattices. Adv. Math. 1975, 16, 125–138. [Google Scholar] [CrossRef]
- Bacławski, K. Galois connections and the Leray spectral sequence. Adv. Math 1977, 25, 191–215. [Google Scholar] [CrossRef] [Green Version]
- Curry, J. Sheaves, cosheaves, and applications. arxiv 2013, arXiv:1303.3255. [Google Scholar]
- Lilius, J. Sheaf Semantics for Petri Nets; Technical Report; Helsinki University of Technology, Digital Systems Laboratory: Espoo, Finland, 1993. [Google Scholar]
- Robinson, M. Imaging geometric graphs using internal measurements. J. Diff. Eqns. 2016, 260, 872–896. [Google Scholar] [CrossRef]
- Shepard, A. A Cellular Description of the Derived Category of a Stratified Space. Ph.D. Thesis, Brown University, Providence, RI, USA, 1985. [Google Scholar]
- Joslyn, C.; Hogan, E.; Robinson, M. Towards a topological framework for integrating semantic information sources. In Proceedings of the Semantic Technologies for Intelligence, Defense, and Security (STIDS), Fairfax, VA, USA, 18–21 November 2014. [Google Scholar]
- Robinson, M. Sheaf and duality methods for analyzing multi-model systems. In Novel Methods in Harmonic Analysis; Pesenson, I., Gia, Q.L., Mayeli, A., Mhaskar, H., Zhou, D.X., Eds.; Birkhäuser: Basel, Switzerland, 2017. [Google Scholar]
- Mansourbeigi, S. Sheaf Theory Approach to Distributed Applications: Analysing Heterogeneous Data in Air Traffic Monitoring. Int. J. Data Sci. Anal. 2017, 3, 34–39. [Google Scholar] [CrossRef] [Green Version]
- Mansourbeigi, S.M. Sheaf Theory as a Mathematical Foundation for Distributed Applications Involving Heterogeneous Data Sets. In Proceedings of the 32nd International Conference on Advanced Information Networking and Applications Workshops (WAINA), Krakow, Poland, 16–18 May 2018. [Google Scholar]
- Zadrozny, W.; Garbayo, L. A Sheaf Model of Contradictions and Disagreements. Preliminary Report and Discussion. arXiv 2018, arXiv:1801.09036. [Google Scholar]
- Purvine, E.; Aksoy, S.; Joslyn, C.; Nowak, K.; Praggastis, B.; Robinson, M. A Topological Approach to Representational Data Models. In Lecture Notes in Computer Science: Human Interface and the Management of Information; Springer: Las Vegas, NV, USA, 2018. [Google Scholar]
- Robinson, M.; Henrich, J.; Capraro, C.; Zulch, P. Dynamic Sensor Fusion Using Local Topology. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018. [Google Scholar]
- Robinson, M. Assignments to Sheaves of Pseudometric Spaces; Technical Report; American University: Washington, DC, USA, 2018. [Google Scholar]
- Goguen, J.A. Sheaf semantics for concurrent interacting objects. Math. Struct. Comput. Sci. 1992, 2, 159–191. [Google Scholar] [CrossRef] [Green Version]
- Nelaturi, S.; de Kleer, J.; Shapiro, V. Combinatorial models for heterogeneous system composition and analysis. In Proceedings of the 11th System of Systems Engineering Conference (SoSE), Kongsberg, Norway, 12–16 June 2016. [Google Scholar]
- Goldblatt, R. Topoi, the Categorial Analysis of Logic; Dover: Mineola, NY, USA, 2006. [Google Scholar]
- Kokar, M.; Tomasik, J.; Weyman, J. Formalizing classes of information fusion systems. Inf. Fusion 2004, 5, 189–202. [Google Scholar] [CrossRef]
- Kokar, M.M.; Baclawski, K.; Gao, H. Category Theory-Based Synthesis of a Higher-Level Fusion Algorithm: An Example. In Proceedings of the 9th International Conference on Information Fusion Information Fusion, Florence, Italy, 10–13 July 2006. [Google Scholar]
- Spivak, D.I. Category Theory for the Sciences; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Ghrist, R.; Hiraoka, Y. Network Codings and Sheaf Cohomology. In Proceedings of the NOLTA, Kobe, Japan, 4–7 September 2011. [Google Scholar]
- Nguemo, M.A.; Tcheka, C. Sheaf cohomology on network codings: Maxflow-mincut theorem. Appl. Gen. Topol. 2017, 18, 219–230. [Google Scholar] [CrossRef] [Green Version]
- Abramsky, S.; Barbosa, R.S.; Kishida, K.; Lal, R.; Mansfield, S. Contextuality, cohomology and paradox. arXiv 2015, arXiv:1502.03097. [Google Scholar]
- Abramsky, S.; Brandenburger, A. The sheaf-theoretic structure of non-locality and contextuality. New J. Phys. 2011, 13, 113036. [Google Scholar] [CrossRef]
- Curry, J.; Ghrist, R.; Nanda, V. Discrete Morse theory for computing cellular sheaf cohomology. Found. Comput. Math. 2016, 16, 875–897. [Google Scholar] [CrossRef] [Green Version]
- Kirk, R.; Bolstad, P.; Manson, S. Spatio-temporal trend analysis of long-term development patterns (1900-2030) in a Southern Appalachian County. Landsc. Urban Plann. 2012, 104, 47–58. [Google Scholar] [CrossRef]
- Mitchell, M.; Zimmerman, J.; Powell, R. Test of a habitat suitability index for black bears in the southern appalachians. Wildl. Soc. Bull. 2002, 30, 794–808. [Google Scholar]
- Willey, C. Aging black bears from first premolar tooth sections. J. Wildl. Manag. 1974, 38, 97–100. [Google Scholar] [CrossRef]
- Joslyn, C.A.; Aksoy, S.; Callahan, T.J.; Hunter, L.; Jefferson, B.; Praggastis, B.; Purvine, E.A.; Tripodi, I.J. Hypernetwork Science: From Multidimensional Networks to Computational Topology. arXiv 2020, arXiv:2003.11782. [Google Scholar]
- Edelsbrunner, H.; Harer, J.L. Computational Topology: An Introduction; AMS: Providence, RI, USA, 2000. [Google Scholar]
- Ghrist, R. Barcodes: The Persistent Topology of Data. Bull. Am. Math. Soc. 2007, 45, 61–75. [Google Scholar] [CrossRef] [Green Version]
- Google. googlemaps 2.4.5. Available online: https://github.com/googlemaps/google-maps-services-python (accessed on 15 June 2020).
- Bieniek, T. Available online: https://github.com/Turbo87/utm (accessed on 15 June 2020).
- Robinson, M. Pseudosections of Sheaves with Consistency Structures; Technical Report; American University: Washington, DC, USA, 2015. [Google Scholar]
- Praggastis, B. Maximal Sections of Sheaves of Data over an Abstract Simplicial Complex. Available online: https://arxiv.org/abs/1612.00397 (accessed on 15 June 2020).
- Stanley, R. Enumerative Combinatorics, 2 ed.; Cambridge University Press: New York, NY, USA, 2011; Volume 1. [Google Scholar]
- MacDonald, I.L.; Zucchini, W. Hidden Markov and Other Models for Discrete-Valued Time Series; CRC Press: Washington, DC, USA, 1997; Volume 110. [Google Scholar]
- Harvey, A.; Koopman, S.J.; Shephard, N. State Space and Unobserved Component Models: Theory and Applications; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Meinhold, R.J.; Singpurwalla, N.D. Understanding the Kalman filter. Am. Stat. 1983, 37, 123–127. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Pearson, J.B.; Stear, E.B. Kalman Filter Applications in Airborne Radar Tracking. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 319–329. [Google Scholar] [CrossRef]
- Siouris, G.M.; Chen, G.; Wang, J. Tracking an incoming ballistic missile using an extended interval Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 232–240. [Google Scholar] [CrossRef]
- Wahba, G. Spline Models for Observational Data; SIAM: Philadelphia, PA, USA, 1990. [Google Scholar]
- Robinson, M. Hunting for Foxes with Sheaves. Not. Am. Math. Soc. 2019, 66, 661–676. [Google Scholar] [CrossRef]
- Robinson, M. Finding cross-species orthologs with local topology. In Proceedings of the ACM-Biocomputing and Bioinformatics Workshop on Topological Data Analysis in Biomedicine, Seattle, WA, USA, 2–5 October 2016. [Google Scholar]
- Ghrist, R.; Krishnan, S. A topological max-flow-min-cut theorem. In Proceedings of the 2013 IEEE Global Conference on Signal and Information Processing, Austin, TX, USA, 3–5 December 2013. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Human Position | Bear Position | |
|---|---|---|
| Vehicle GPS ⟨lat,long,ft⟩ | √ | |
| Text | √ | |
| Receiver ⟨UTM N,UTM E,m,deg,m⟩ | √ | √ |
| G = GPS on Bear ⟨UTM N, UTM E,m⟩ | √ |
| Vertex | Data Format | Description | Stalk |
|---|---|---|---|
| Bear Collar | (E, N, m) | Position and elevation of bear from collar | |
| V=Vehicle GPS | (lat, long, ft) | Position and elevation of human from vehicle | |
| Text | string | Text description of human’s location | set of strings |
| Radio VHF Device | (E, N, m, m, deg) | Position and elevation of human and position of bear relative to human |
| Distance Code | Distance (m) |
|---|---|
| 2 | 1500 |
| 3 | 1000 |
| 4 | 750 |
| 5 | 500 |
| 6 | 375 |
| New Consistent Face | Vertex Cover | Measure | |
|---|---|---|---|
| 0.00 | |||
| 9.48 | |||
| 15.90 | |||
| 18.42 | |||
| 20.35 | |||
| 464.50 | 1 |
| Parameter Standard Deviation | Value (m) |
|---|---|
| Bear state update | 0.008 |
| Human state update | 26.524 |
| Bear GPS Obs. | 16.091 |
| VHF GPS Obs. | 0.032 |
| Vehicle GPS Obs. | 91.434 |
| Street sign Obs. | 27.597 |
| VHF Obs. | 663.998 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Joslyn, C.A.; Charles, L.; DePerno, C.; Gould, N.; Nowak, K.; Praggastis, B.; Purvine, E.; Robinson, M.; Strules, J.; Whitney, P. A Sheaf Theoretical Approach to Uncertainty Quantification of Heterogeneous Geolocation Information. Sensors 2020, 20, 3418. https://doi.org/10.3390/s20123418
Joslyn CA, Charles L, DePerno C, Gould N, Nowak K, Praggastis B, Purvine E, Robinson M, Strules J, Whitney P. A Sheaf Theoretical Approach to Uncertainty Quantification of Heterogeneous Geolocation Information. Sensors. 2020; 20(12):3418. https://doi.org/10.3390/s20123418
Chicago/Turabian StyleJoslyn, Cliff A., Lauren Charles, Chris DePerno, Nicholas Gould, Kathleen Nowak, Brenda Praggastis, Emilie Purvine, Michael Robinson, Jennifer Strules, and Paul Whitney. 2020. "A Sheaf Theoretical Approach to Uncertainty Quantification of Heterogeneous Geolocation Information" Sensors 20, no. 12: 3418. https://doi.org/10.3390/s20123418