A Single-Dataset-Based Pre-Processing Joint Domain Localized Algorithm for Clutter-Suppression in Shipborne High-Frequency Surface-Wave Radar


Abstract
:1. Introduction
2. Principle of Joint Domain Localized Processing Algorithm
3. Heterogeneity of the First-Order Sea Clutter
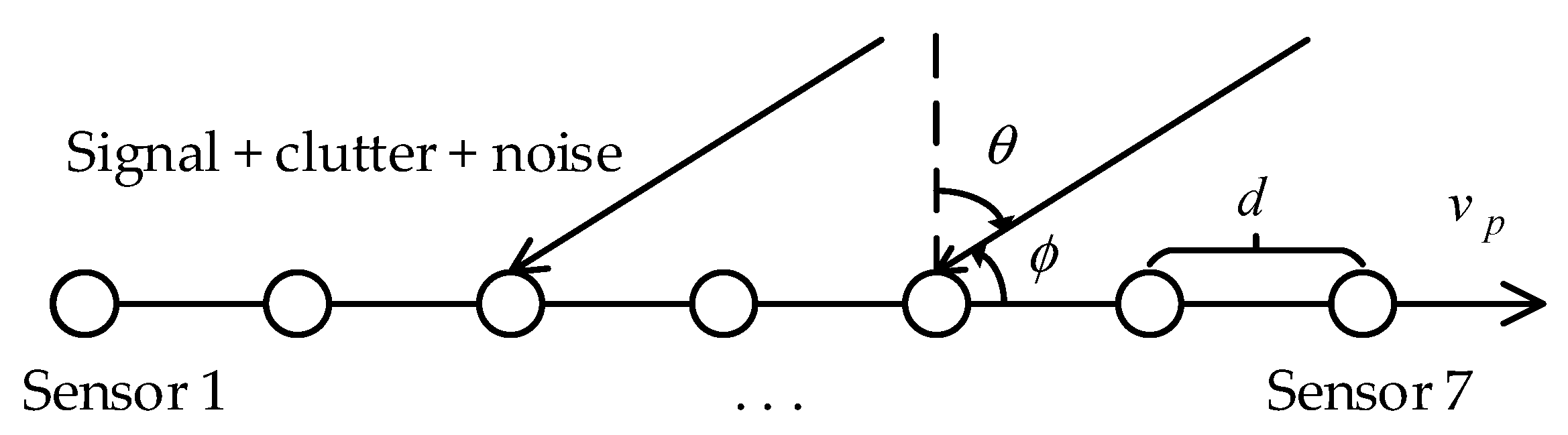
3.1. Shipborne HFSWR System
3.2. Space-Time Distribution of the First-Order Sea Clutter
3.3. Homogeneity Analysis of the First-Order Sea Clutter in Range Dimension
- Vectorize the data by in the kth LPR. The covariance matrix can be calculated as ;
- Eigen-decompose and obtain 9 eigenvalues and 9 eigenvectors , then pick out the eigenvector corresponding to the largest eigenvalue as ;
- Compute the correlation coefficients by the following equation .
4. Modified JDL Algorithm with Training Samples Acquisition Method
4.1. Training Sample Acquisition Method
4.2. Algorithm Procedure
- Determine the size of the LPR and transform the receiving data to the angle-Doppler domain using Equations (6) and (7).
- For transformed data , conduct the unscented transformation to get sigma vectors by using Equations (16)–(18).
- Set the transformation as for convince. Here we get secondary data . Calculate the weighted sample mean and sample covariance of by using Equations (14) and (15). The result can be seen as the initial estimate of the CCM of .
- Estimate the CCM with the equation .
- Calculate the adaptive weights as Equation (11) denotes and calculate the output statistic by using Equation (12).
5. Experimental Results and Performance Comparison
5.1. Measured Data with Simulated Target
5.2. Measured Data with Real Target
5.3. Performance Comparison with Different Algorithms
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lipa, B.J.; Barrick, D.E.; Isaacson, J.; Lilleboe, P.M. CODAR wave measurements from a North Sea semisubmersible. IEEE J. Ocean. Eng. 1990, 15, 119–125. [Google Scholar] [CrossRef]
- Xie, J.; Yuan, Y.; Liu, Y. Experimental analysis of sea clutter in shipborne HFSWR. IEE Proc. Radar Sonar Navig. 2001, 148, 67–71. [Google Scholar] [CrossRef]
- Sun, H.; Guo, X.; Lu, Y.; Lesturgie, M. Estimation of the ocean clutter rank for HF/VHF radar space–time adaptive processing. IET Radar Sonar Navig. 2010, 4, 755–763. [Google Scholar] [CrossRef]
- Walsh, J.; Huang, W.; Gill, E. The First-Order High Frequency Radar Ocean Surface Cross Section for an Antenna on a Floating Platform. IEEE Trans. Antennas Propag. 2010, 58, 2994–3003. [Google Scholar] [CrossRef]
- Walsh, J.; Huang, W.; Gill, E. The Second-Order High Frequency Radar Ocean Surface Cross Section for an Antenna on a Floating Platform. IEEE Trans. Antennas Propag. 2012, 60, 4804–4813. [Google Scholar] [CrossRef]
- Walsh, J.; Huang, W.; Gill, E. Further Analysis of the Second-Order High Frequency Radar Ocean Surface Cross Section for an Antenna on a Floating Platform. In Proceedings of the 2012 IEEE Radar Conference (RadarConf), Atlanta, GA, USA, 7–11 May 2012; pp. 0389–0393. [Google Scholar]
- Walsh, J.; Huang, W.; Gill, E.W. The second-order high frequency radar ocean surface foot-scatter cross section for an antenna on a floating platform. IEEE Trans. Antennas Propag. 2013, 61, 5833–5838. [Google Scholar] [CrossRef]
- Xie, J.; Sun, M.; Ji, Z. First-order ocean surface cross-section for shipborne HFSWR. Electron. Lett. 2013, 49, 1025–1026. [Google Scholar] [CrossRef]
- Sun, M.; Xie, J.; Ji, Z.; Cai, W. Second-Order Ocean Surface Cross Section for Shipborne HFSWR. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 823–826. [Google Scholar] [CrossRef]
- Sun, M.; Xie, J.; Ji, Z.; Yao, G. Ocean surface cross sections for shipborne HFSWR with sway motion. Radio Sci. 2016, 51, 1745–1757. [Google Scholar] [CrossRef] [Green Version]
- Khoury, J.E.; Guinvarc’h, R.; Gillard, R.; Uguen, B. Sea-echo doppler spectrum perturbation of the received signals from a floating high-frequency surface wave radar. IET RadarSonar Navig. 2012, 6, 165–171. [Google Scholar] [CrossRef]
- Ma, Y.; Gill, E.W.; Huang, W. First-order bistatic high-frequency radar ocean surface cross-section for an antenna on a floating platform. Iet RadarSonar Navig. 2016, 10, 1136–1144. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Gill, E.W.; Huang, W. First-order high frequency radar ocean surface cross section incorporating a dual-frequency platform motion model. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–4. [Google Scholar]
- Yao, G.; Xie, J.; Ji, Z.; Sun, M. The first-order ocean surface cross section for shipborne HFSWR with rotation motion. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 0447–0450. [Google Scholar]
- Ma, Y.; Huang, W.; Gill, E.W. High-frequency radar ocean surface cross section incorporating a dual-frequency platform motion model. IEEE J. Ocean. Eng. 2017, 43, 195–204. [Google Scholar] [CrossRef]
- Yao, G.; Xie, J.; Huang, W.; Ji, Z.; Zhou, W. Theoretical analysis of the first-order sea clutter in shipborne high-frequency surface wave radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1255–1259. [Google Scholar]
- Yao, G.; Xie, J.; Huang, W. Ocean Surface Cross Section for Bistatic HF Radar Incorporating a Six DOF Oscillation Motion Model. Remote Sens. 2019, 11, 2738. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Zong, C. Ship target detection for HF groundwave shipborne OTH radar. IEEE Proc. Radar Sonar Navig. 1999, 146, 305–311. [Google Scholar] [CrossRef]
- Xie, J.; Yuan, Y.; Liu, Y. Suppression of sea clutter with orthogonal weighting for target detection in shipborne HFSWR. IEE Proc. Radar Sonar Navig. 2002, 149, 39–44. [Google Scholar] [CrossRef]
- Sun, M.; Xie, J.; Hao, Z.; Yi, C. Target detection and estimation for shipborne HFSWR based on oblique projection. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing (ICSP), Beijing, China, 21–25 October 2012; pp. 386–389. [Google Scholar]
- Klemm, R. Principles of Space-Time Adaptive Processing; IET: London, UK, 2002. [Google Scholar]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 853–863. [Google Scholar] [CrossRef]
- Lesturgie, M. Use of STAP techniques to enhance the detection of slow targets in shipborne HFSWR. In Proceedings of the International Radar Conference, Adelaide, Australia, 3–5 September 2003; pp. 504–509. [Google Scholar]
- Ji, Z.; Yi, C.; Xie, J.; Li, Y. The Application of JDL to Suppress Sea Clutter for Shipborne HFSWR. Int. J. Antennas Propag. 2015, 2015, 825350. [Google Scholar] [CrossRef]
- Guo, L.; Yang, Q.; Deng, W. Suppression of sea clutter with modified joint domain localized algorithm in shipborne HFSWR. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Yi, C.; Ji, Z.; Xie, J.; Sun, M.; Li, Y. Sea clutter-suppression method for shipborne high-frequency surface-wave radar. IET Radar Sonar Navig. 2016, 10, 107–113. [Google Scholar] [CrossRef]
- Yi, C.; Ji, Z.; Kirubarajan, T.; Xie, J.; Hu, B. An Improved Oblique Projection Method for Sea Clutter-suppression in Shipborne HFSWR. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1089–1093. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Pallotta, L.; Farina, A. Covariance matrix estimation via geometric barycenters and its application to radar training data selection. IET Radar Sonar Navig. 2013, 7, 600–614. [Google Scholar] [CrossRef]
- Rabideau, D.J.; Steinhardt, A.O. Improved adaptive clutter cancellation through data-adaptive training. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 879–891. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Q.; Deng, W. Weak Target Detection within the Nonhomogeneous Ionospheric Clutter Background of HFSWR Based on STAP. Int. J. Antennas Propag. 2013, 2013, 258392. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, T.; Wu, J.; Duan, J. Training Sample Selection for Space-Time Adaptive Processing in Heterogeneous Environments. IEEE Geosci. Remote Sens. Lett. 2015, 12, 691–695. [Google Scholar] [CrossRef]
- Zhang, X.; Su, Y.; Yang, Q.; Dong, Y.; Deng, W. Space-time adaptive processing-based algorithm for meteor trail suppression in high-frequency surface wave radar. IET Radar Sonar Navig. 2015, 9, 429–436. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Liu, H.; Guo, Y. Training samples selection method for space-time adaptive processing based on clutter covariance matrix reconstruction. Electron. Lett. 2017, 53, 953–954. [Google Scholar] [CrossRef]
- Li, H.; Bao, W.; Hu, J.; Xie, J.; Liu, R. A training samples selection method based on system identification for STAP. Signal Process. 2018, 142, 119–124. [Google Scholar] [CrossRef]
- Sun, K.; Meng, H.; Wang, Y.; Wang, X. Direct data domain STAP using sparse representation of clutter spectrum. Signal Process. 2011, 91, 2222–2236. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Liu, Y.; Meng, H.; Wang, X. Jointly sparse recovery of multiple snapshots in STAP. In Proceedings of the 2013 IEEE Radar Conference (RadarCon13), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–4. [Google Scholar]
- Sen, S. OFDM radar space-time adaptive processing by exploiting spatio-temporal sparsity. IEEE Trans. Signal Process. 2012, 61, 118–130. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Wang, H.; Jiang, W. On clutter sparsity analysis in space–time adaptive processing airborne radar. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1214–1218. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Wang, H.; Jiang, W. Adaptive clutter-suppression based on iterative adaptive approach for airborne radar. Signal Process. 2013, 93, 3567–3577. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Wang, H.; Nie, L. Sparsity-based space–time adaptive processing using complex-valued homotopy technique for airborne radar. IET Signal Process. 2014, 8, 552–564. [Google Scholar] [CrossRef]
- Yang, Z.; Fa, R.; Qin, Y.; Li, X.; Wang, H. Direct Data Domain Sparsity-Based STAP Utilizing Subaperture Smoothing Techniques. Int. J. Antennas Propag. 2015, 2015, 273521. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zhang, Y.D.; Amin, M.G.; Himed, B. Space–Time Adaptive Processing and Motion Parameter Estimation in Multistatic Passive Radar Using Sparse Bayesian Learning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 944–957. [Google Scholar] [CrossRef]
- Jeon, H.; Chung, Y.; Chung, W.; Kim, J.; Yang, H. Clutter covariance matrix estimation using weight vectors in knowledge-aided STAP. Electron. Lett. 2017, 53, 560–562. [Google Scholar] [CrossRef]
- Hong, W.; Lujing, C. On adaptive spatial-temporal processing for airborne surveillance radar systems. Ieee Trans. Aerosp. Electron. Syst. 1994, 30, 660–670. [Google Scholar] [CrossRef]
- Adve, R.S.; Hale, T.B.; Wicks, M.C. Practical joint domain localised adaptive processing in homogeneous and nonhomogeneous environments. 2. Nonhomogeneous environments. IEE Proc. Radar Sonar Navig. 2000, 147, 66–74. [Google Scholar] [CrossRef] [Green Version]
- Adve, R.S.; Hale, T.B.; Wicks, M.C. Practical joint domain localised adaptive processing in homogeneous and nonhomogeneous environments. I. Homogeneous environments. IEE Proc. Radar Sonar Navig. 2000, 147, 57–65. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| platform velocity | ||
| number of receiving channels | ||
| distance between sensors | ||
| carrier frequency | ||
| bandwidth | ||
| wavelength | ||
| pulse repetition interval |
| Parameters | Target 1 | Target 2 | Target 3 |
|---|---|---|---|
| Range | 80 km | 80 km | 80 km |
| Radial velocity | −5.71 m/s | 4.87 m/s | 6.66 m/s |
| Doppler frequency | −0.2012 Hz | 0.1714 Hz | 0.2347 Hz |
| Azimuth | |||
| SCNR | 0 dB | 0 dB | 0 dB |
| Algorithm | SCNR Improvement (dB) | |||
|---|---|---|---|---|
| Simulated Target 1 | Simulated Target 2 | Simulated Target 3 | Real Target | |
| Conventional JDL | 9.0 | 19.1 | 0.75 | 17.9 |
| IOW | −45.2 | 24.4 | 3.5 | 14.7 |
| IOP | 1.49 | 18.2 | 9.1 | 15.5 |
| Proposed algorithm | 14.3 | 30.0 | 13.2 | 24.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, L.; Zhang, X.; Yao, D.; Yang, Q.; Bai, Y.; Deng, W. A Single-Dataset-Based Pre-Processing Joint Domain Localized Algorithm for Clutter-Suppression in Shipborne High-Frequency Surface-Wave Radar. Sensors 2020, 20, 3773. https://doi.org/10.3390/s20133773
Guo L, Zhang X, Yao D, Yang Q, Bai Y, Deng W. A Single-Dataset-Based Pre-Processing Joint Domain Localized Algorithm for Clutter-Suppression in Shipborne High-Frequency Surface-Wave Radar. Sensors. 2020; 20(13):3773. https://doi.org/10.3390/s20133773
Chicago/Turabian StyleGuo, Liang, Xin Zhang, Di Yao, Qiang Yang, Yang Bai, and Weibo Deng. 2020. "A Single-Dataset-Based Pre-Processing Joint Domain Localized Algorithm for Clutter-Suppression in Shipborne High-Frequency Surface-Wave Radar" Sensors 20, no. 13: 3773. https://doi.org/10.3390/s20133773
APA StyleGuo, L., Zhang, X., Yao, D., Yang, Q., Bai, Y., & Deng, W. (2020). A Single-Dataset-Based Pre-Processing Joint Domain Localized Algorithm for Clutter-Suppression in Shipborne High-Frequency Surface-Wave Radar. Sensors, 20(13), 3773. https://doi.org/10.3390/s20133773