Improving Object Tracking by Added Noise and Channel Attention



Abstract
:1. Introduction
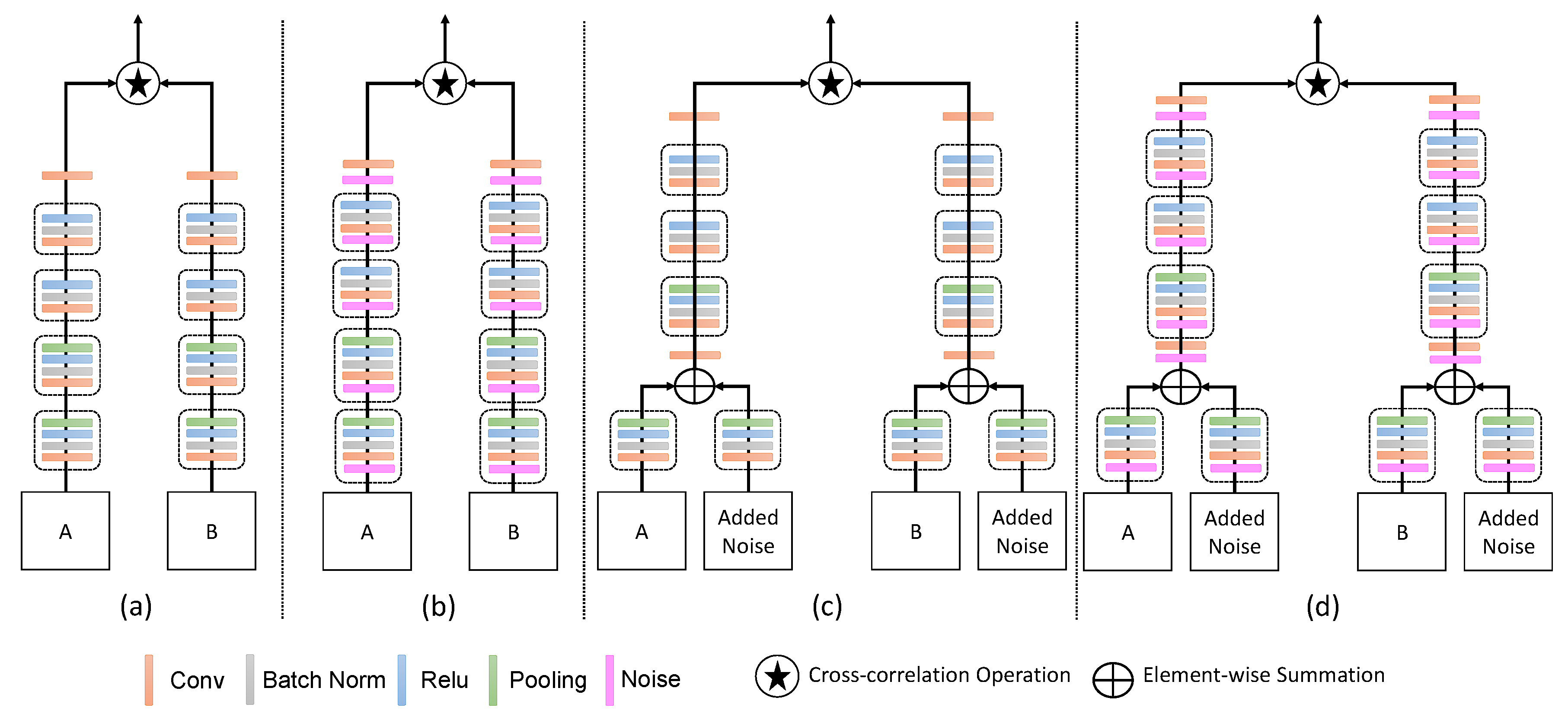
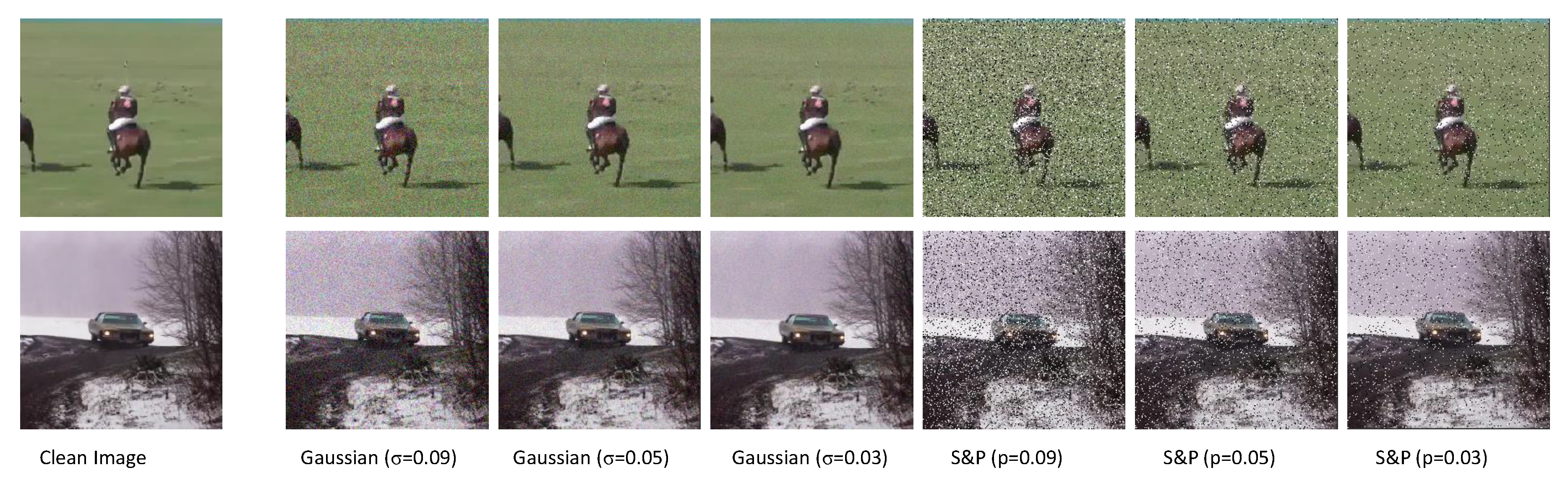
- We propose an additive noise as input regularization to improve deep network generalization.
- Early feature fusion mechanism is proposed to learn better target feature representation.
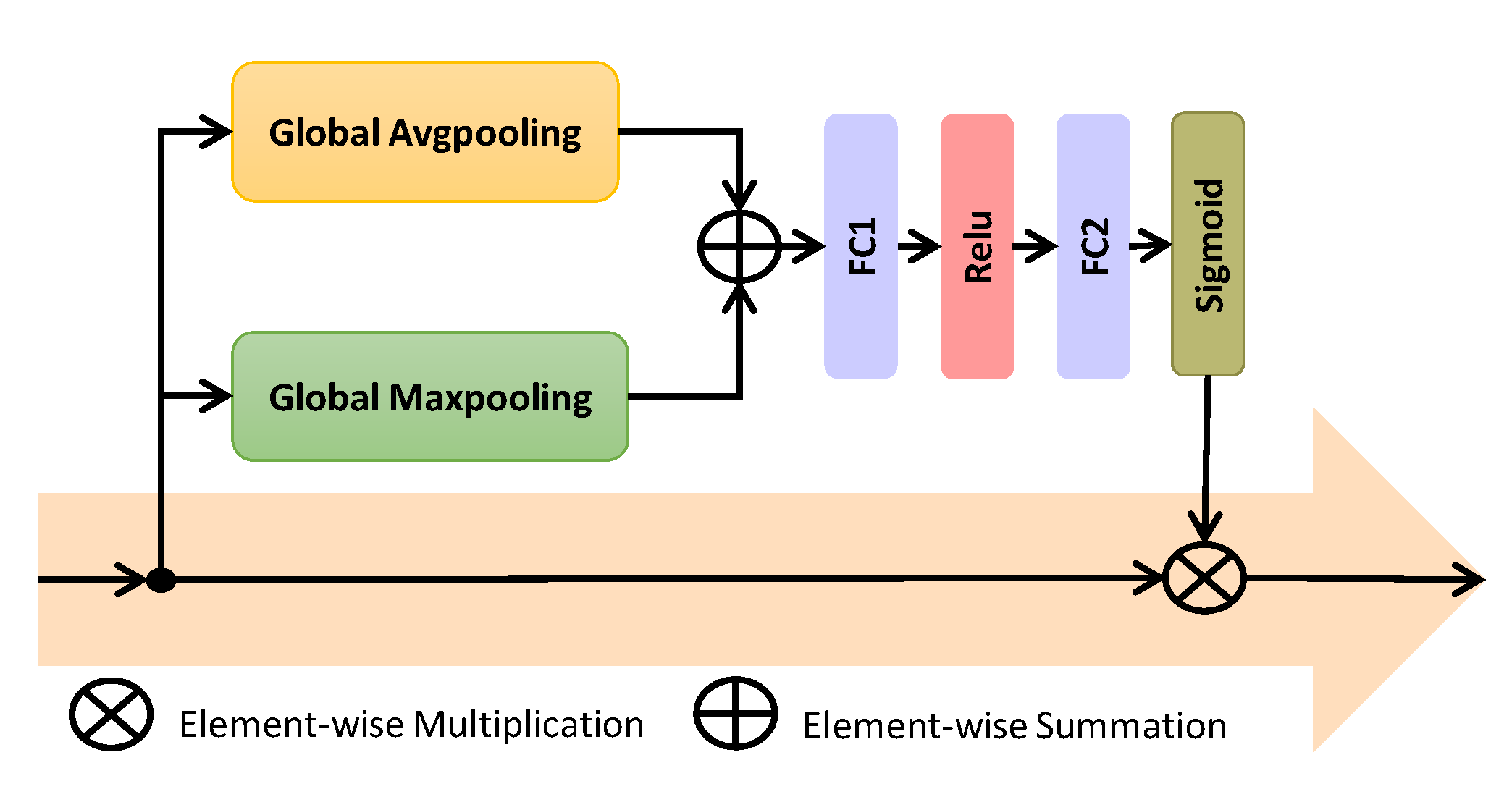
- An adaptive channel attention mechanism is integrated to give more weight to the important channels compared to the less important ones using a skip connection.
- Robustness of the proposed tracker is evaluated on the six benchmark datasets. Our experiments demonstrate better performance of the proposed tracker compared to the 30 state-of-the-art methods.
2. Related Work
2.1. Deep Learning with Noise
2.2. Deep Feature-Based Trackers
2.3. Siamese Network-Based Trackers
2.4. Attention Mechanism-Based Trackers
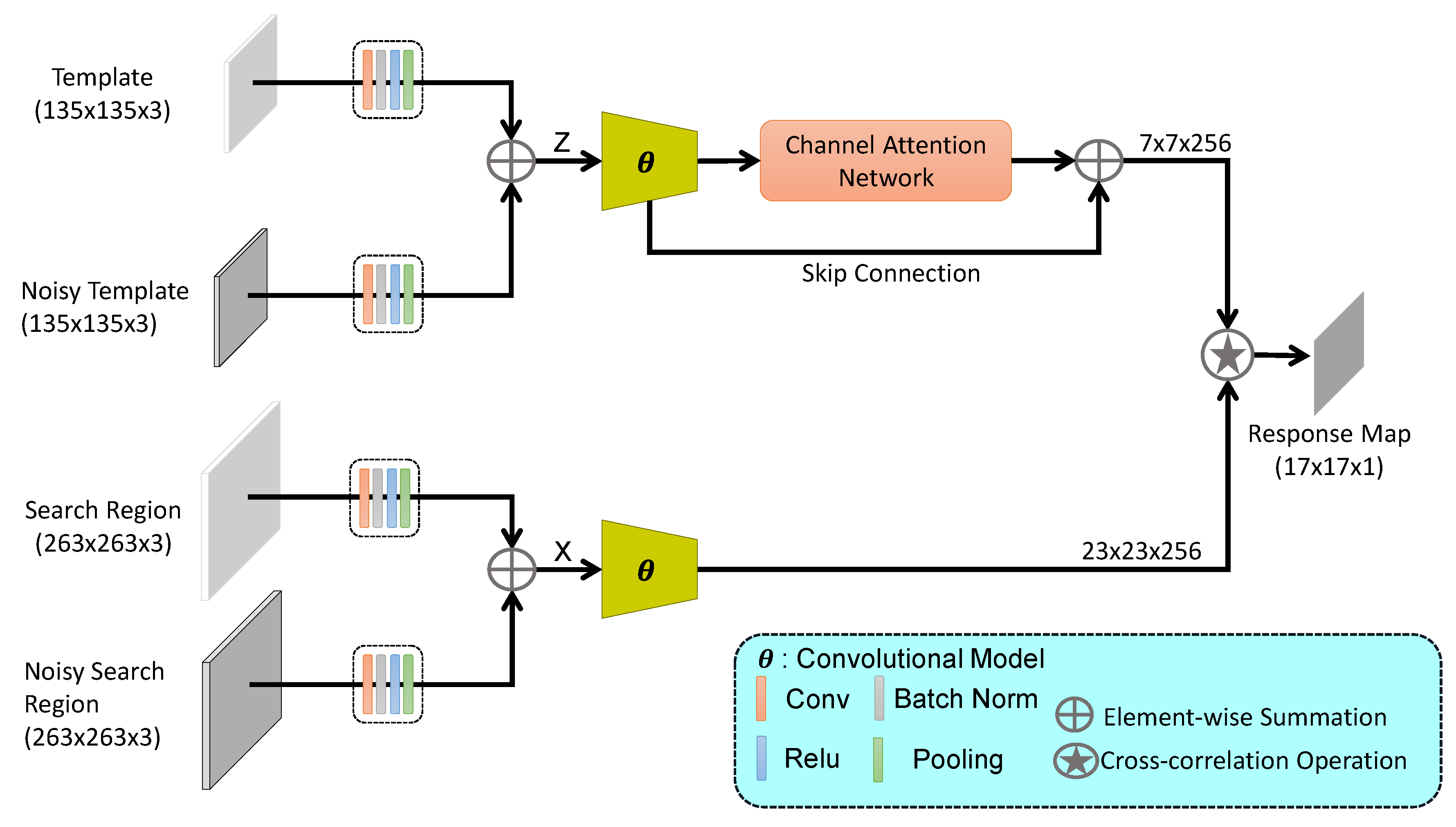
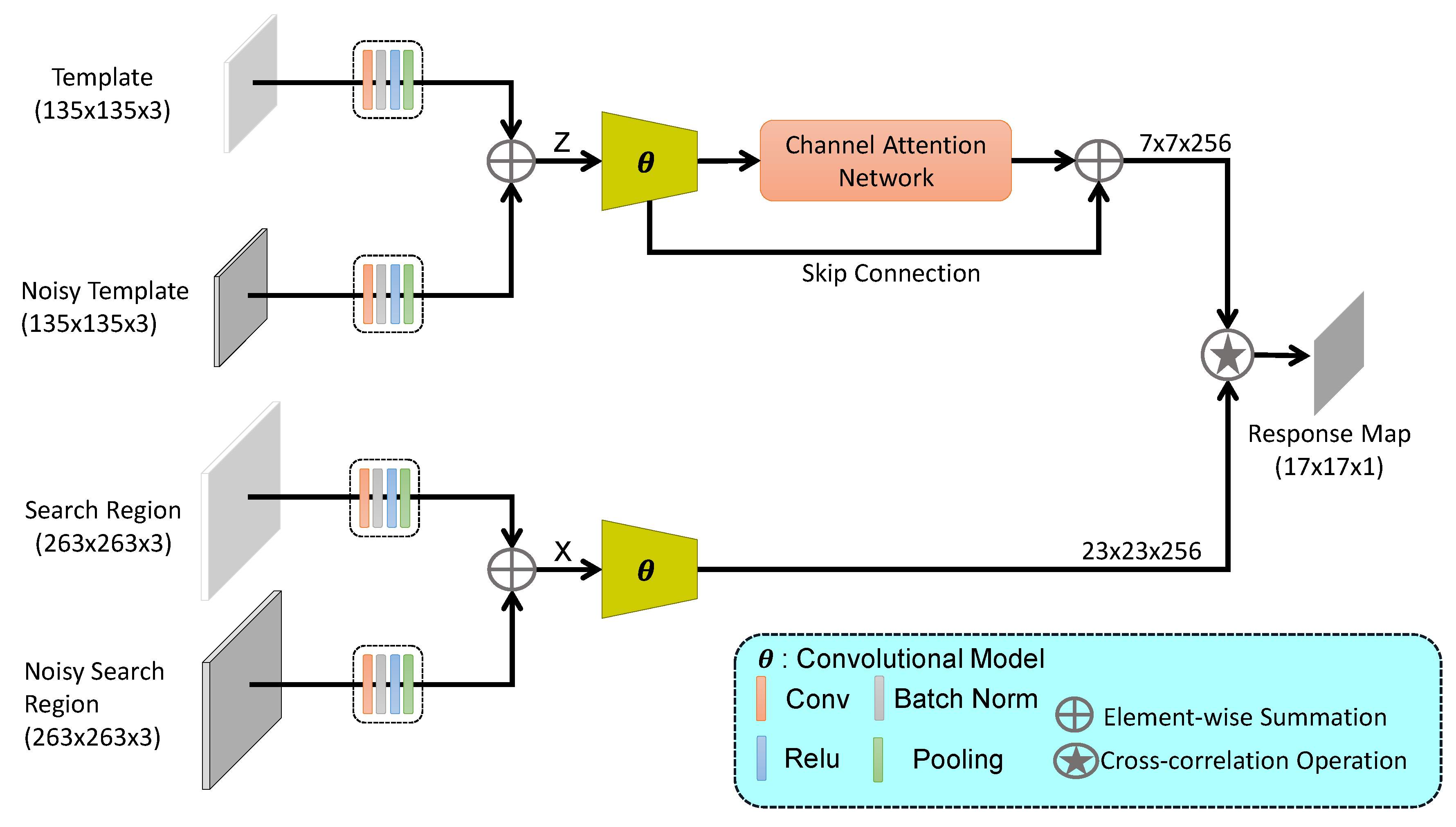
3. The Proposed Input-Regularized Channel Attentional Siamese (IRCA-Siam) Network
3.1. Fully Convolutional Siamese Network
3.2. Input Regularization and Feature Fusion
3.3. Channel Attention Network
4. Experiments
4.1. Implementation Details
4.2. Comparison with State-of-the-Art Trackers
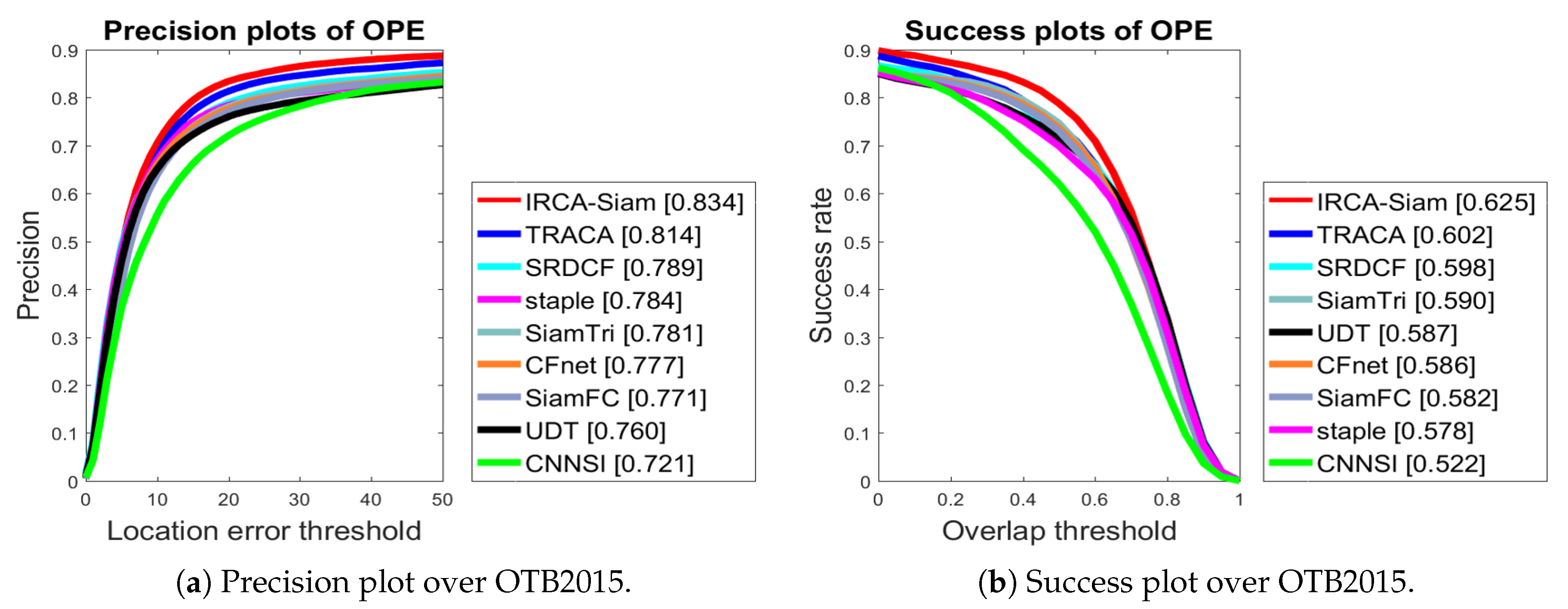
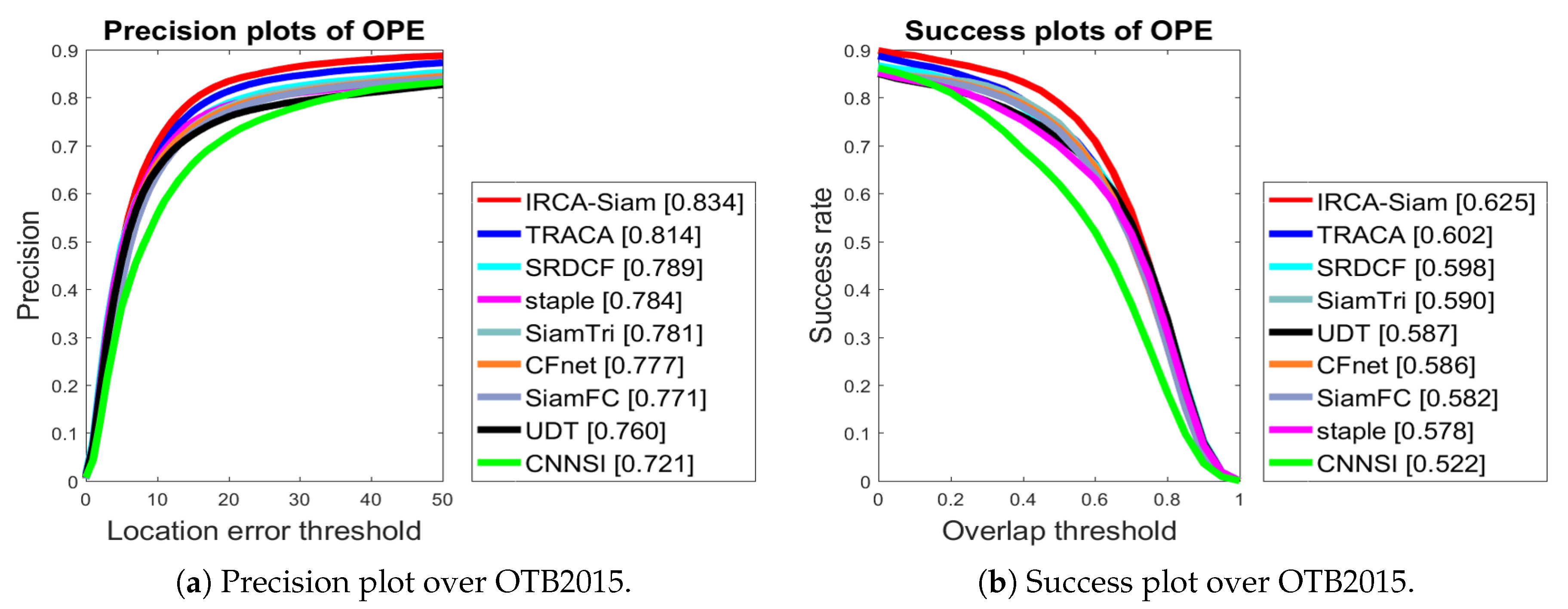
4.2.1. Evaluation over OTB Datasets
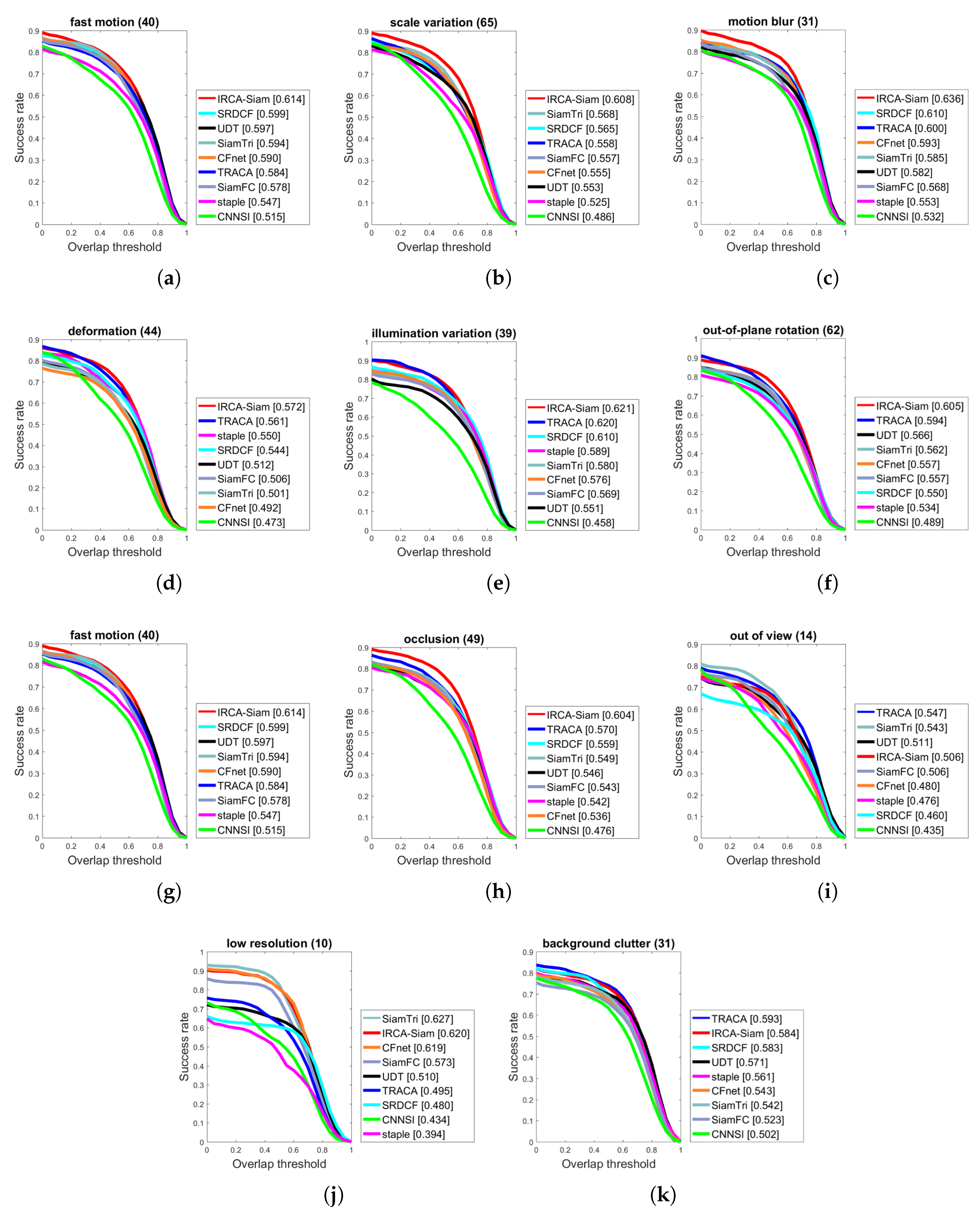
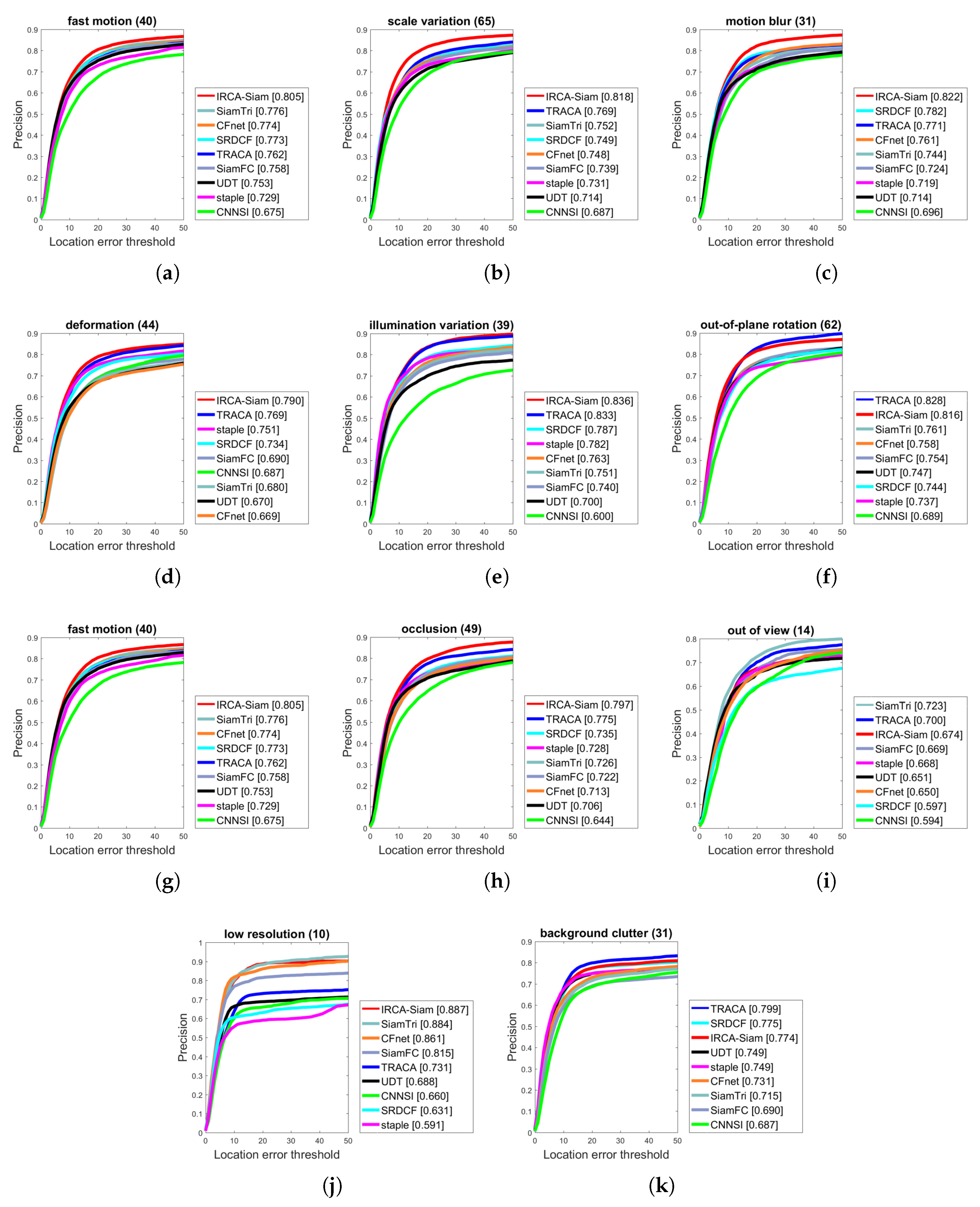
4.2.2. Challenge-Based Comparison
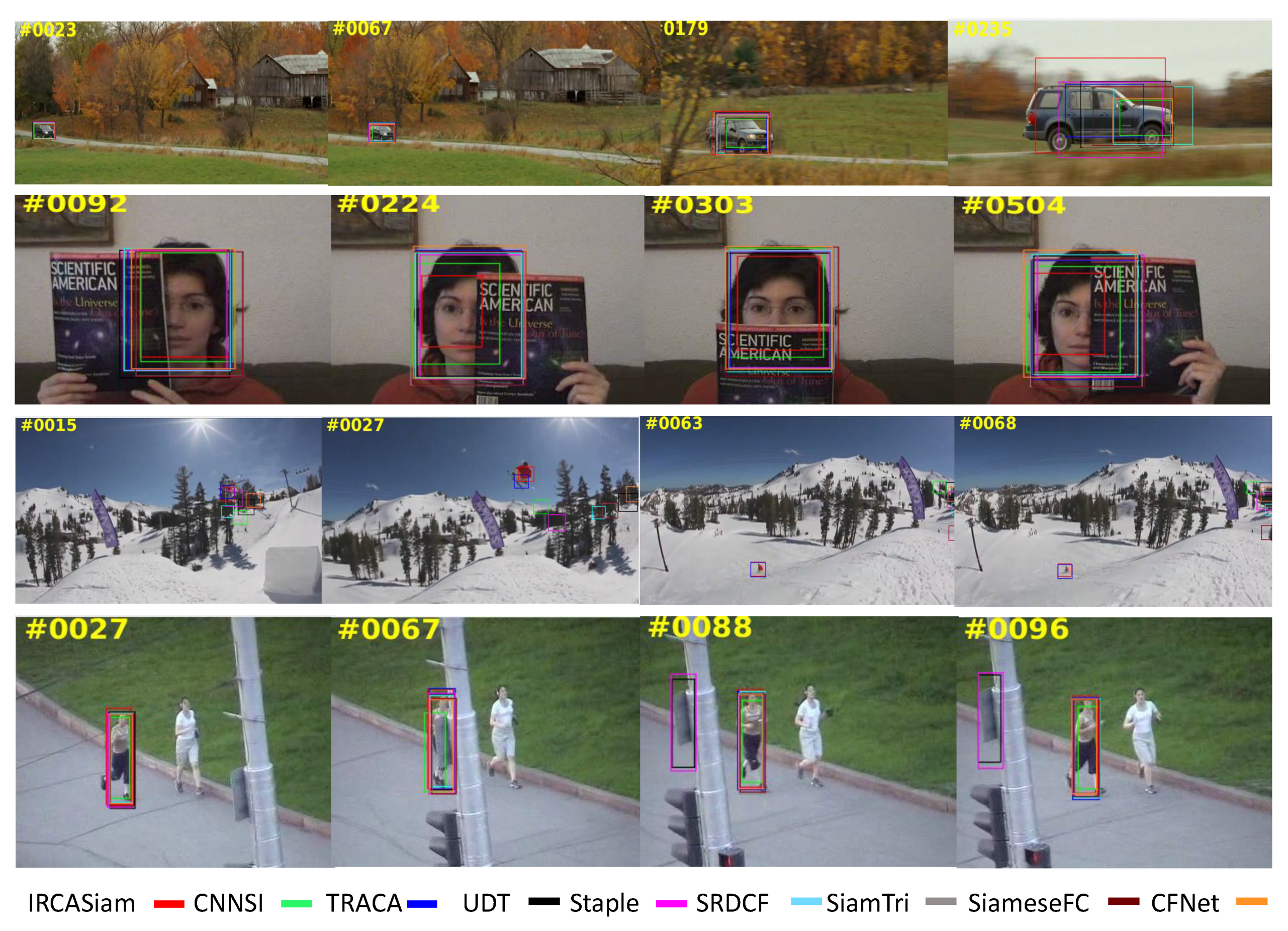
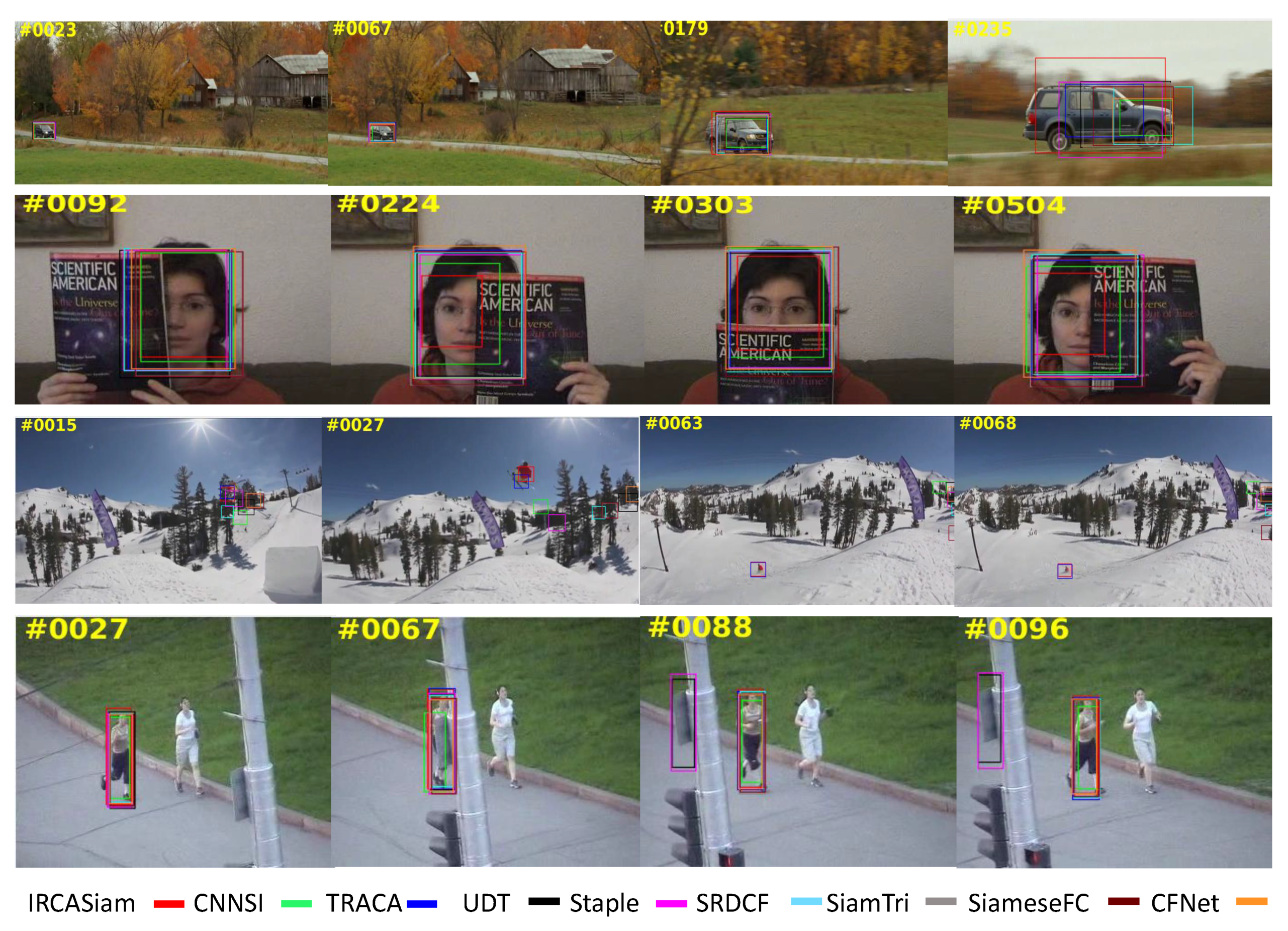
4.2.3. Qualitative Analysis
4.2.4. Evaluation over TC128 Dataset
4.2.5. Evaluation over UAV123 Dataset
4.2.6. Evaluation over VOT2016 and VOT2017 Dataset
4.3. Ablation Study
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Gupta, M.; Kumar, S.; Behera, L.; Subramanian, V.K. A novel vision-based tracking algorithm for a human-following mobile robot. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2016, 47, 1415–1427. [Google Scholar] [CrossRef]
- Renoust, B.; Le, D.D.; Satoh, S. Visual analytics of political networks from face-tracking of news video. IEEE Trans. Multimed. 2016, 18, 2184–2195. [Google Scholar] [CrossRef]
- Yao, H.; Cavallaro, A.; Bouwmans, T.; Zhang, Z. Guest editorial introduction to the special issue on group and crowd behavior analysis for intelligent multicamera video surveillance. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 405–408. [Google Scholar] [CrossRef]
- Menze, M.; Geiger, A. Object scene flow for autonomous vehicles. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 8–10 June 2015; pp. 3061–3070. [Google Scholar]
- Danelljan, M.; Hager, G.; Shahbaz Khan, F.; Felsberg, M. Convolutional features for correlation filter based visual tracking. In Proceedings of the IEEE International Conference on Computer Vision Workshops (ICCV) Workshop, Santiago, Chile, 13–16 December 2015; pp. 58–66. [Google Scholar]
- Fiaz, M.; Mahmood, A.; Jung, S.K. Tracking noisy targets: A review of recent object tracking approaches. arXiv 2018, arXiv:1802.03098. [Google Scholar]
- Qi, Y.; Zhang, S.; Qin, L.; Yao, H.; Huang, Q.; Lim, J.; Yang, M.H. Hedged deep tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4303–4311. [Google Scholar]
- Ma, C.; Huang, J.B.; Yang, X.; Yang, M.H. Hierarchical convolutional features for visual tracking. In Proceedings of the IEEE International Conference on Computer Vision Workshops (ICCV), Santiago, Chile, 13–16 December 2015; pp. 3074–3082. [Google Scholar]
- Fiaz, M.; Mahmood, A.; Javed, S.; Jung, S.K. Handcrafted and Deep Trackers: Recent Visual Object Tracking Approaches and Trends. ACM Comput. Surv. (CSUR) 2019, 52, 43. [Google Scholar] [CrossRef]
- Valmadre, J.; Bertinetto, L.; Henriques, J.; Vedaldi, A.; Torr, P.H. End-to-end representation learning for correlation filter based tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2805–2813. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Zhou, X.; Yao, C.; Wen, H.; Wang, Y.; Zhou, S.; He, W.; Liang, J. East: An efficient and accurate scene text detector. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5551–5560. [Google Scholar]
- Jeon, M.; Jeong, Y.S. Compact and Accurate Scene Text Detector. Appl. Sci. 2020, 10, 2096. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Chan, A.B. Learning dynamic memory networks for object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 152–167. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-convolutional siamese networks for object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 850–865. [Google Scholar]
- Held, D.; Thrun, S.; Savarese, S. Learning to track at 100 fps with deep regression networks. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 749–765. [Google Scholar]
- Tao, R.; Gavves, E.; Smeulders, A.W. Siamese instance search for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1420–1429. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Noh, H.; You, T.; Mun, J.; Han, B. Regularizing deep neural networks by noise: Its interpretation and optimization. In Proceedings of the Advances in Neural Information Processing Systems 30, Long Beach, CA, USA, 4–9 December 2017; pp. 5109–5118. [Google Scholar]
- Song, Y.; Ma, C.; Gong, L.; Zhang, J.; Lau, R.W.; Yang, M.H. Crest: Convolutional residual learning for visual tracking. In Proceedings of the IEEE International Conference on Computer Vision(ICCV), Venice, Italy, 22–29 October 2017; pp. 2555–2564. [Google Scholar]
- Nam, H.; Han, B. Learning multi-domain convolutional neural networks for visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4293–4302. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. Context-aware correlation filter tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1396–1404. [Google Scholar]
- Danelljan, M.; Bhat, G.; Shahbaz Khan, F.; Felsberg, M. Eco: Efficient convolution operators for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Choi, J.; Jin Chang, H.; Yun, S.; Fischer, T.; Demiris, Y.; Choi, J.Y. Attentional correlation filter network for adaptive visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4807–4816. [Google Scholar]
- Wang, Q.; Teng, Z.; Xing, J.; Gao, J.; Hu, W.; Maybank, S. Learning attentions: Residual attentional siamese network for high performance online visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Late City, UT, USA, 18–22 June 2018; pp. 4854–4863. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Online object tracking: A benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 25–27 June 2013; pp. 2411–2418. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Object tracking benchmark. IEEE TPAMI 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [Green Version]
- Liang, P.; Blasch, E.; Ling, H. Encoding color information for visual tracking: Algorithms and benchmark. IEEE Trans. Image Process. 2015, 24, 5630–5644. [Google Scholar] [CrossRef]
- Mueller, M.; Smith, N.; Ghanem, B. A benchmark and simulator for uav tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 445–461. [Google Scholar]
- Kristan, M.; Pflugfelder, R.; Lebeda, K. The Visual Object Tracking VOT2016 challenge results. In Proceedings of the European Conference on Computer Vision (ECCV) Workshop, Amsterdam, The Netherlands, 8–10 October 2016; pp. 777–823. [Google Scholar]
- Kristan, M.; Leonardis, A.; Matas, J.; Felsberg, M.; Pflugfelder, R.; Cehovin Zajc, L.; Vojir, T.; Hager, G.; Lukezic, A.; Eldesokey, A.; et al. The visual object tracking vot2017 challenge results. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1949–1972. [Google Scholar]
- Marvasti-Zadeh, S.M.; Cheng, L.; Ghanei-Yakhdan, H.; Kasaei, S. Deep learning for visual tracking: A comprehensive survey. arXiv 2019, arXiv:1912.00535. [Google Scholar]
- Li, P.; Wang, D.; Wang, L.; Lu, H. Deep visual tracking: Review and experimental comparison. Pattern Recognit. 2018, 76, 323–338. [Google Scholar] [CrossRef]
- Bishop, C.M. Training with noise is equivalent to Tikhonov regularization. Neural Comput. 1995, 7, 108–116. [Google Scholar] [CrossRef]
- Rifai, S.; Glorot, X.; Bengio, Y.; Vincent, P. Adding noise to the input of a model trained with a regularized objective. arXiv 2011, arXiv:1104.3250. [Google Scholar]
- Liu, X.; Cheng, M.; Zhang, H.; Hsieh, C.J. Towards robust neural networks via random self-ensemble. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 369–385. [Google Scholar]
- Wang, L.; Ouyang, W.; Wang, X.; Lu, H. Visual tracking with fully convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision(ICCV), Santiago, Chile, 13–16 December 2015; pp. 3119–3127. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems 30, Lake Tahoe, CA, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond correlation filters: Learning continuous convolution operators for visual tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 472–488. [Google Scholar]
- Bhat, G.; Johnander, J.; Danelljan, M.; Shahbaz Khan, F.; Felsberg, M. Unveiling the power of deep tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 483–498. [Google Scholar]
- Han, B.; Sim, J.; Adam, H. Branchout: Regularization for online ensemble tracking with convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 3356–3365. [Google Scholar]
- Yun, S.; Choi, J.; Yoo, Y.; Yun, K.; Young Choi, J. Action-decision networks for visual tracking with deep reinforcement learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2711–2720. [Google Scholar]
- Hong, S.; You, T.; Kwak, S.; Han, B. Online tracking by learning discriminative saliency map with convolutional neural network. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 597–606. [Google Scholar]
- Teng, Z.; Xing, J.; Wang, Q.; Lang, C.; Feng, S.; Jin, Y. Robust object tracking based on temporal and spatial deep networks. In Proceedings of the IEEE International Conference on Computer Vision(ICCV), Venice, Italy, 22–29 October 2017; pp. 1144–1153. [Google Scholar]
- Fiaz, M.; Mahmood, A.; Jung, S.K. Deep Siamese Networks toward Robust Visual Tracking. In Visual Object Tracking in the Deep Neural Networks Era; IntechOpen: Rijeka, Croatia, 2019; ISBN 978-1-78985-157-1. [Google Scholar]
- Rahman, M.M.; Fiaz, M.; Jung, S.J. Efficient Visual Tracking with Stacked Channel-Spatial Attention Learning. IEEE Access 2020, 8, 100857–100869. [Google Scholar] [CrossRef]
- Lukezic, A.; Vojir, T.; Cehovin Zajc, L.; Matas, J.; Kristan, M. Discriminative correlation filter with channel and spatial reliability. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6309–6318. [Google Scholar]
- Fiaz, M.; Rahman, M.M.; Mahmood, A.; Farooq, S.S.; Baek, K.Y.; Jung, S.K. Adaptive Feature Selection Siamese Networks for Visual Tracking. In Proceedings of the International Workshop on Frontiers of Computer Vision, Kagoshima, Japan, 20–22 February 2020; pp. 167–179. [Google Scholar]
- Cui, Z.; Xiao, S.; Feng, J.; Yan, S. Recurrently target-attending tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1449–1458. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Late City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar]
- He, A.; Luo, C.; Tian, X.; Zeng, W. A twofold siamese network for real-time object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Late City, UT, USA, 18–22 June 2018; pp. 4834–4843. [Google Scholar]
- Huang, L.; Zhao, X.; Huang, K. Got-10k: A large high-diversity benchmark for generic object tracking in the wild. arXiv 2018, arXiv:1810.11981. [Google Scholar] [CrossRef] [Green Version]
- Kristan, M.; Matas, J.; Leonardis, A.; Felsberg, M.; Cehovin, L.; Fernandez, G.; Vojir, T.; Hager, G.; Nebehay, G.; Pflugfelder, R. The visual object tracking vot2015 challenge results. In Proceedings of the IEEE International Conference on Computer Vision(ICCV) Workshop, Santiago, Chile, 13–16 December 2015; pp. 1–23. [Google Scholar]
- Dong, X.; Shen, J. Triplet loss in siamese network for object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 459–474. [Google Scholar]
- Fiaz, M.; Mahmood, A.; Jung, S.K. Convolutional neural network with structural input for visual object tracking. In Proceedings of the 34th ACM/SIGAPP Symposium on Applied Computing, Limassol, Cyprus, 8–12 April 2019; pp. 1345–1352. [Google Scholar]
- Danelljan, M.; Hager, G.; Shahbaz Khan, F.; Felsberg, M. Learning spatially regularized correlation filters for visual tracking. In Proceedings of the IEEE International Conference on Computer Vision(ICCV), Santiago, Chile, 13–16 December 2015; pp. 4310–4318. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H. Staple: Complementary learners for real-time tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1401–1409. [Google Scholar]
- Choi, J.; Chang, H.J.; Fischer, T.; Yun, S.; Lee, K.; Jeong, J.; Demiris, Y.; Young Choi, J. Context-aware deep feature compression for high-speed visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Late City, UT, USA, 18–22 June 2018; pp. 479–488. [Google Scholar]
- Li, B.; Xie, W.; Zeng, W.; Liu, W. Learning to Update for Object Tracking With Recurrent Meta-Learner. IEEE Trans. Image Process. 2019, 28, 3624–3635. [Google Scholar] [CrossRef]
- Shen, J.; Tang, X.; Dong, X.; Shao, L. Visual object tracking by hierarchical attention siamese network. IEEE Trans. Cybern. 2019, 50, 3068–3080. [Google Scholar] [CrossRef]
- Zhang, Z.; Peng, H. Deeper and Wider Siamese Networks for Real-Time Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 4591–4600. [Google Scholar]
- Kuai, Y.; Wen, G.; Li, D. Masked and dynamic Siamese network for robust visual tracking. Inf. Sci. 2019, 503, 169–182. [Google Scholar] [CrossRef]
- Gao, M.; Jin, L.; Jiang, Y.; Guo, B. Manifold Siamese Network: A Novel Visual Tracking ConvNet for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1612–1623. [Google Scholar] [CrossRef]
- Choi, J.; Kwon, J.; Lee, K.M. Deep meta learning for real-time target-aware visual tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 911–920. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 583–596. [Google Scholar] [CrossRef] [Green Version]
- Choi, J.; Jin Chang, H.; Jeong, J.; Demiris, Y.; Young Choi, J. Visual tracking using attention-modulated disintegration and integration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4321–4330. [Google Scholar]
- Du, Y.; Yan, Y.; Chen, S.; Hua, Y.; Wang, H. Object-Adaptive LSTM Network for Visual Tracking. In Proceedings of the 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1719–1724. [Google Scholar]
- Guo, Q.; Feng, W.; Zhou, C.; Huang, R.; Wan, L.; Wang, S. Learning dynamic siamese network for visual object tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1763–1771. [Google Scholar]
- Zhang, J.; Ma, S.; Sclaroff, S. MEEM: Robust tracking via multiple experts using entropy minimization. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 188–203. [Google Scholar]
- Li, Y.; Zhu, J. A scale adaptive kernel correlation filter tracker with feature integration. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 254–265. [Google Scholar]
- Huang, B.; Xu, T.; Jiang, S.; Chen, Y.; Bai, Y. Robust Visual Tracking via Constrained Multi-Kernel Correlation Filters. IEEE Trans. Multimed. 2020. [Google Scholar] [CrossRef]
- Gao, P.; Yuan, R.; Wang, F.; Xiao, L.; Fujita, H.; Zhang, Y. Siamese attentional keypoint network for high performance visual tracking. Knowl. Based Syst. 2019, 2019, 105448. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Chen, B.; Ouyang, W.; Wang, D.; Yang, X.; Lu, H. Gradnet: Gradient-guided network for visual object tracking. In Proceedings of the IEEE International Conference on Computer Vision(ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 6162–6171. [Google Scholar]
- Li, B.; Yan, J.; Wu, W.; Zhu, Z.; Hu, X. High performance visual tracking with siamese region proposal network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Late City, UT, USA, 18–22 June 2018; pp. 8971–8980. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.S.; Felsberg, M. Discriminative scale space tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1561–1575. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Chan, A.B. Visual Tracking via Dynamic Memory Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2019. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Song, Y.; Ma, C.; Zhou, W.; Liu, W.; Li, H. Unsupervised Deep Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1308–1317. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracker | OTB2013 | OTB2015 | FPS | Real-Time |
|---|---|---|---|---|
| TRACA [59] | 65.2 | 60.3 | 101 | Yes |
| SiamTri [55] | 61.5 | 59.0 | 85 | Yes |
| CSRDCF [48] | 59.9 | 58.2 | 24 | No |
| ACFN [24] | 60.7 | 57.5 | 15 | No |
| CNNSI [56] | 53.9 | 52.2 | <1 | No |
| SRDCF [57] | 62.6 | 59.8 | 6 | No |
| Staple [58] | 59.3 | 57.8 | 80 | Yes |
| SiamFc-lu [60] | - | 62.0 | 82 | Yes |
| HASiam [61] | 64.0 | 61.1 | 30 | Yes |
| Kuai et al. [63] | - | 62.2 | 25 | No |
| MSN [64] | 64.3 | 59.7 | 40 | Yes |
| MLT [65] | 62.1 | 61.1 | 48 | Yes |
| SiameseFC [15] | 60.7 | 58.2 | 86 | Yes |
| CFNet [10] | 58.9 | 58.6 | 43 | Yes |
| UDT [78] | 61.9 | 58.7 | 70 | Yes |
| IRCA-Siam | 65.3 | 62.5 | 77 | Yes |
| Trackers | Precision | Success | FPS |
|---|---|---|---|
| UDT [78] | 71.7 | 50.7 | 70 |
| Kuai et al. [63] | 71.6 | 52.3 | 25 |
| KCF [66] | 54.9 | 38.7 | 160 |
| MLT [65] | - | 49.8 | 48 |
| SCT [67] | 62.7 | 46.6 | 40 |
| SiameseFC [15] | 68.8 | 50.3 | 86 |
| CFNet [10] | 60.7 | 45.6 | 43 |
| Staple [58] | 49.8 | 80 | |
| CNNSI [56] | 63.8 | 44.8 | <1 |
| OA-LSTM [68] | 70.8 | 49.5 | 11.5 |
| SRDCF [57] | - | 50.9 | 6 |
| IRCA-Siam | 74.5 | 55.0 | 77 |
| Trackers | Precision | Success |
|---|---|---|
| MLT [65] | - | 43.5 |
| Kuai et al. [63] | 73.0 | 50.9 |
| KCF [66] | 54.9 | 38.7 |
| SRDCF [57] | 67.7 | 46.4 |
| ECOhc [23] | 72.5 | 50.6 |
| MEEM [70] | 62.7 | 39.2 |
| SAMF [71] | 59.2 | 39.6 |
| DSST [76] | 58.6 | 35.6 |
| IRCA-Siam | 74.5 | 52.0 |
| Trackers | Overlap (↑) | Robustness (↓) | EAO (↑) |
|---|---|---|---|
| MemTrack [14] | 0.53 | 1.44 | 0.27 |
| MemDTC [77] | 0.51 | 1.82 | 0.27 |
| ECO [23] | 0.54 | - | 0.37 |
| HASiam [61] | - | - | 0.27 |
| Staple [58] | 0.53 | 0.38 | 0.29 |
| SRDCF [57] | 0.54 | 0.42 | 0.25 |
| DSiam [69] | 0.49 | 2.93 | 0.18 |
| MLT [65] | 0.53 | - | - |
| CCOT [40] | 0.54 | 0.24 | 0.33 |
| UDT [78] | 0.54 | - | 0.22 |
| SiameseFC [15] | 0.53 | 0.46 | 0.23 |
| CMKCF [72] | 0.53 | 0.18 | 0.30 |
| SiamFCRes22 [62] | 0.54 | 0.38 | 0.30 |
| IRCA-Siam | 0.56 | 0.19 | 0.30 |
| Trackers | Overlap (↑) | Robustness (↓) | EAO (↑) | FPS |
|---|---|---|---|---|
| CSRDCF [48] | 0.49 | 0.49 | 0.25 | 13 |
| MemTrack [14] | 0.49 | 1.77 | 0.24 | 50 |
| MemDTC [77] | 0.49 | 1.77 | 0.25 | 40 |
| SRDCF [57] | 0.49 | 0.97 | 0.12 | 6 |
| MSN [64] | 0.50 | 0.46 | 0.26 | 40 |
| DSST [76] | 0.39 | 1.45 | 0.08 | 24 |
| SATIN [73] | 0.49 | 1.34 | 0.28 | 24 |
| SiameseFC [15] | 0.50 | 0.59 | 0.19 | 86 |
| GradNet [74] | 0.50 | 0.37 | 0.24 | 80 |
| SiameseRPN [75] | 0.49 | 0.46 | 0.24 | 200 |
| SiamFCRes22 [62] | 0.50 | 0.49 | 0.23 | 70 |
| IRCA-Siam | 0.52 | 0.29 | 0.25 | 76 |
| Tracker | Additive Input Noise | Added Noise Layer before | Added Noise Layer Type | Precision | Success |
|---|---|---|---|---|---|
| SiameseFC | - | - | - | 77.1 | 58.2 |
| SiameseFC | S&P (p = 0.09) | - | - | 76.5 | 57.2 |
| SiameseFC | S&P (p = 0.05) | - | - | 75.2 | 54.8 |
| SiameseFC | S&P (p = 0.03) | - | - | 73.5 | 52.9 |
| SiameseFC | Gaussian () | - | 76.9 | 57.8 | |
| SiameseFC | Gaussian () | - | - | 75.7 | 56.4 |
| SiameseFC | Gaussian () | - | - | 75.1 | 55.3 |
| SiameseFC | - | Conv5 | Gaussian () | 76.8 | 56.5 |
| SiameseFC | - | Conv5 | Gaussian () | 75.2 | 55.7 |
| SiameseFC | - | Conv5 | Gaussian () | 74.1 | 53.9 |
| SiameseFC | - | Conv1, Conv2, Conv3, Conv4, Conv5 | Gaussian () | 75.5 | 55.9 |
| SiameseFC | Gaussian () | Conv1, Conv2, Conv3, Conv4, Conv5 | Gaussian () | 76.7 | 57.9 |
| IR-Siam | - | - | - | 80.8 | 60..6 |
| IR-Siam | S&P (p = 0.09) | - | - | 81.6 | 61.5 |
| IR-Siam | S&P (p = 0.05) | - | - | 80.3 | 61.0 |
| IR-Siam | S&P (p = 0.03) | - | - | 79.9 | 59.3 |
| IR-Siam | Gaussian () | - | - | 81.9 | 61.9 |
| IR-Siam | Gaussian () | - | - | 81.2 | 61.3 |
| IR-Siam | Gaussian () | - | - | 80.1 | 60.4 |
| IR-Siam | - | Conv6 | Gaussian () | 80.9 | 60.6 |
| IR-Siam | - | Conv6 | Gaussian () | 80.2 | 60.1 |
| IR-Siam | - | Conv6 | Gaussian () | 78.9 | 58.7 |
| IR-Siam | - | Conv1, Conv2, Conv3, Conv4, Conv5, Conv6 | Gaussian () | 81.2 | 60.7 |
| IR-Siam | Gaussian () | Conv1, Conv2, Conv3, Conv4, Conv5, Conv6 | Gaussian () | 80.5 | 59.5 |
| IR-Siam | - | Conv1, Conv2, Conv6 | Gaussian () | 81.5 | 60.5 |
| IR-Siam | Gaussian () | Conv1, Conv2, Conv6 | Gaussian () | 82.1 | 60.8 |
| IRCA-Siam | S&P (p = 0.09) | - | - | 82.7 | 62.3 |
| IRCA-Siam | Gaussian () | - | - | 83.4 | 62.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiaz, M.; Mahmood, A.; Baek, K.Y.; Farooq, S.S.; Jung, S.K. Improving Object Tracking by Added Noise and Channel Attention. Sensors 2020, 20, 3780. https://doi.org/10.3390/s20133780
Fiaz M, Mahmood A, Baek KY, Farooq SS, Jung SK. Improving Object Tracking by Added Noise and Channel Attention. Sensors. 2020; 20(13):3780. https://doi.org/10.3390/s20133780
Chicago/Turabian StyleFiaz, Mustansar, Arif Mahmood, Ki Yeol Baek, Sehar Shahzad Farooq, and Soon Ki Jung. 2020. "Improving Object Tracking by Added Noise and Channel Attention" Sensors 20, no. 13: 3780. https://doi.org/10.3390/s20133780
APA StyleFiaz, M., Mahmood, A., Baek, K. Y., Farooq, S. S., & Jung, S. K. (2020). Improving Object Tracking by Added Noise and Channel Attention. Sensors, 20(13), 3780. https://doi.org/10.3390/s20133780