Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms




Abstract
:1. Introduction
2. Comparison with Existing Reviews
3. Methodology
3.1. Study Design
3.2. Search Strategy
- For adding studies related to the non-destructive evaluation of bridges (autonomous/semi-autonomous robot-based and non-robot-based methods), the following keywords were used: ‘non-destructive evaluation of bridges’ and ‘NDE of bridges’;
- For adding studies related to the use of different sensors for NDE, some of the keywords used included ‘sensors for non-destructive evaluation of bridges’ and ‘NDE sensors for bridges’;
- For ensuring that a sufficiently broad-level examination of the relevant literature from the fields related to the NDE of civil infrastructure can be included in the early phases of the literature search and review, the following keywords were also used: ‘NDE sensors for civil infrastructures’, ‘non-destructive evaluation sensors of civil infrastructure’, ‘non-destructive evaluation for civil infrastructures’, and the ‘NDE for civil infrastructures’.
3.3. Inclusion and Exclusion Criteria
3.4. Selection Process
3.5. Data Synthesis
4. Proposed Taxonomy
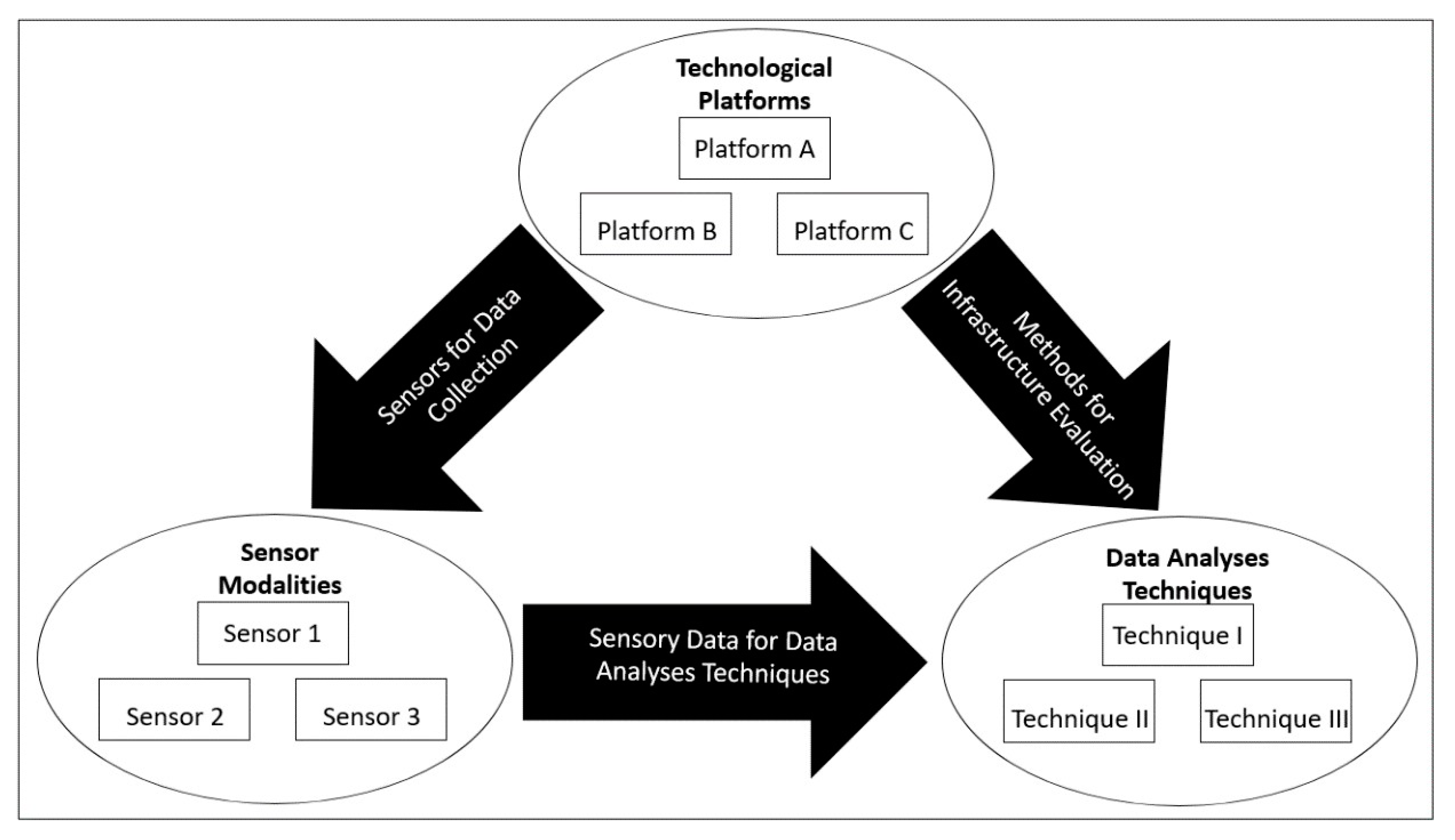
- Platforms: Different robotic platforms being used to assess the various physical characteristics of bridges. A taxonomy will be proposed, which will differentiate the different types of robot platforms for the NDE of bridges. Some of the essential components for evaluating the SHM of bridges will also be examined;
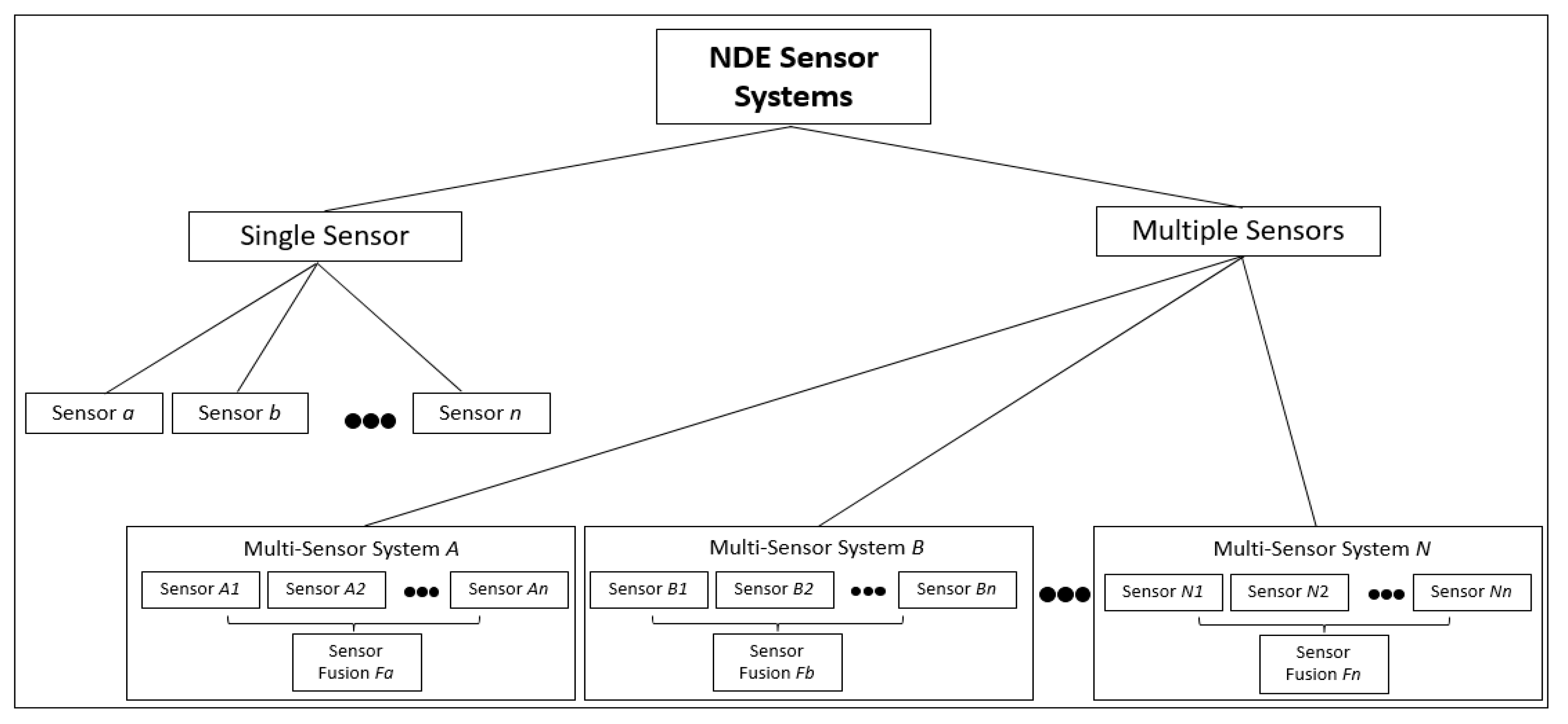
- Sensors: An array of instrumentation modules used for data collection will also be discussed with specific distinction between the single sensor-based and multiple sensor-based systems for NDE of bridges. Data from multiple sources require an additional level of complexity with regards to specifying the appropriate sensor fusion techniques. This particular aspect will also be analyzed in sufficient detail;
- Algorithms: A variety of techniques that facilitate the surface-level and the sub-surface-level structural evaluation of bridges will be highlighted in this section.
5. Technological Platforms
5.1. Ground Robots
5.2. Aerial Robots
5.3. Marine Robots
6. Tools and Techniques for Data Collection
6.1. Single Sensor Systems
6.2. Multi-Sensor Systems
7. Algorithms for Data Analysis
7.1. Surface-Level Analysis: Concrete Crack Detection
7.2. Sub-Surface-Level Analysis: Rebar Detection and Localization
8. Challenges
9. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
 | Habib Ahmed received his M.S. degree in Robotics and Intelligent Machine Engineering from National University of Science and Technology, Islamabad, Pakistan in 2016. He is currently pursuing his Doctoral degree in Computer Engineering from University of Nevada, Reno, NV, USA. He is a member of the Advanced Robotics and Automation Lab, University of Nevada, Reno, NV. His research interests include: Machine Learning, Deep Learning, Non-Destructive Testing, Robotics and Human-Robot Interaction. |
 | Hung M. La (IEEE SM’2009, ASCE M’2020) received his B.S. and M.S. degrees in Electrical Engineering from Thai Nguyen University of Technology, Thai Nguyen, Vietnam, in 2001 and 2003, respectively, and his Ph.D. degree in Electrical and Computer Engineering from Oklahoma State University, Stillwater, OK, USA, in 2011. Dr. La is the Director of the Advanced Robotics and Automation (ARA) Lab, and Associate Professor of the Department of Computer Science and Engineering, University of Nevada, Reno, NV, USA. From 2011 to 2014, he was a Post-Doctoral research fellow and then a Research Faculty Member at the Center for Advanced Infrastructure and Transportation, Rutgers University, Piscataway, NJ, USA. He has authored over 120 papers published in major journals, book chapters and international conference proceedings. His current research interests include robotic systems and mobile sensor networks. Dr. La is the recipient of the 2019 NSF CAREER award, and the 2014 ASCE Charles Pankow Award for the Robotics Assisted Bridge Inspection Tool (RABIT), eight best paper awards/finalists, and a best presentation award in international conferences (e.g., ICRA, IROS, ACC, SSRR). Dr. La is an Associate Editor of the International Conference on Robotics and Automation (ICRA), the IEEE Transactions on Human-Machine Systems, and the Frontiers in Robotics & AI, respectively, and Guest Editor of International Journal of Robust and Nonlinear Control. Dr. La also serves as an editorial board member of Drones, International Journal of Automation and Control, and International Journal of Robotic Engineering, respectively. Dr. La is a technical committee member of multiple robotics conferences (e.g., ICRA, IROS, IRC). |
 | Nenad Gucunski received the B.S. degree in civil engineering from the University of Zagreb, Croatia, and the M.S. degree and the Ph.D. degree in civil engineering from the University of Michigan, Ann Arbor, MI, USA. Dr. Gucunski is Professor and Chairman of the Department of Civil and Environmental Engineering at Rutgers University. He is also director of the Infrastructure Condition Monitoring Program (ICMP) at the Rutgers’ Center for Advanced Infrastructure and Transportation (CAIT). Dr. Gucunski has extensive practical and research experience in the development and application of nondestructive evaluation (NDE) technologies for condition assessment and monitoring of transportation infrastructure, bridges in particular, development of deterioration and predictive models, automation and integration of NDE technologies, and integration of NDE and remote sensing. He was leading several prominent research projects related to the assessment of bridges by NDE technologies. He was the principal investigator for the Automated Nondestructive Evaluation and Rehabilitation System (ANDERS) for Bridge Decks project, and the lead of the NDE team for the FHWA’s Long Term Bridge Performance (LTBP) Program from 2009 to 2017. He led the development of RABIT (Robotics Assisted Bridge Inspection Tool) for Bridges, a fully autonomous bridge deck inspection system that deploys multiple NDE technologies and high-resolution imaging. He also led a Strategic Highway Research Program II (SHRP2) R06-A project on NDE for concrete bridge decks for the National Academies, and several other bridge and pavement related projects funded by federal and state agencies. Dr. Gucunski is an internationally recognized expert in NDE/NDT technologies and an elected member of NDT Academia International. He published more than 250 publications on various aspects of development and application of NDE technologies in the condition assessment of transportation infrastructure. Dr. Gucunski is also actively involved in several technical committees. He is the past chair of the ASCE Geophysical Engineering Committee, and an active member of the American Society for Nondestructive Testing (ASNT) Infrastructure Committee, and the Transportation Research Board (TRB) AFF40 Committee on Field Testing and NDE of Transportation Structures. Dr. Gucunski received several awards for his research accomplishments, most notably the 2014 ASCE Charles Pankow Award for Innovation. |
References
- Penn, A. The Deadliest Bridge Collapses in the US in the Last 50 Years. Available online: https://www.cnn.com/2018/03/15/us/bridge-collapse-history-trnd/index.html (accessed on 20 June 2020).
- Kirk, S.R.; Mallett, J.W. Highway Bridge Conditions: Issues for Congress; Congressional Research Service: Washington, DC, USA, 19 December 2013.
- Wright, L.; Chinowsky, P.; Strzepek, K.; Jones, R.; Streeter, R.; Smith, J.B.; Mayotte, J.-M.; Powell, A.; Jantarasami, L.; Perkins, W. Estimated effects of climate change on flood vulnerability of U.S. bridges. Mitig. Adapt. Strat. Glob. Chang. 2012, 17, 939–955. [Google Scholar] [CrossRef] [Green Version]
- Briaud, J.-L.; Brandimarte, L.; Wang, J.; D’Odorico, P. Probability of scour depth exceedance owing to hydrologic uncertainty. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2007, 1, 77–88. [Google Scholar] [CrossRef]
- 2015 Status of the Nation’s Highways, Bridges, and Transit: Conditions and Performance. In US Department of Transportation Report; Department of Transportation: Washington, DC, USA, 2015.
- Cook, W.; Barr, P.J.; Halling, M.W. Bridge Failure Rate. J. Perform. Constr. Facil. 2015, 29, 04014080. [Google Scholar] [CrossRef]
- Neumann, J.E.; Price, J.; Chinowsky, P.; Wright, L.; Ludwig, L.; Streeter, R.; Jones, R.; Smith, J.B.; Perkins, W.; Jantarasami, L.; et al. Climate change risks to US infrastructure: Impacts on roads, bridges, coastal development, and urban drainage. Clim. Chang. 2014, 131, 97–109. [Google Scholar] [CrossRef] [Green Version]
- La, H.M.; Gucunski, N.; Dana, K.; Kee, S.-H. Development of an autonomous bridge deck inspection robotic system. J. Field Robot. 2017, 34, 1489–1504. [Google Scholar] [CrossRef] [Green Version]
- Lee, G.C.; Mohan, S.B.; Huang, C.; Fard, B.N. A Study of Bridge Failures (1980–2012); The State University of New York: Buffalo, NY, USA, 2013. [Google Scholar]
- Flint, M.; Fringer, O.; Billington, S.L.; Freyberg, D.; Diffenbaugh, N.S. Historical Analysis of Hydraulic Bridge Collapses in the Continental United States. J. Infrastruct. Syst. 2017, 23, 04017005. [Google Scholar] [CrossRef] [Green Version]
- Khelifa, A.; Garrow, L.A.; Higgins, M.J.; Meyer, M.D. Impacts of Climate Change on Scour-Vulnerable Bridges: Assessment Based on HYRISK. J. Infrastruct. Syst. 2013, 19, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Gucunski, N.; Kee, S.-H.; La, H.; Basily, B.; Maher, A. Delamination and concrete quality assessment of concrete bridge decks using a fully autonomous RABIT platform. Struct. Monit. Maint. 2015, 2, 19–34. [Google Scholar] [CrossRef] [Green Version]
- Sakagami, T. Remote nondestructive evaluation technique using infrared thermography for fatigue cracks in steel bridges. Fatigue Fract. Eng. Mater. Struct. 2015, 38, 755–779. [Google Scholar] [CrossRef]
- Liu, Z.; Forsyth, D.S.; Komorowski, J.P.; Hanasaki, K.; Kirubarajan, T. Survey: State of the Art in NDE Data Fusion Techniques. IEEE Trans. Instrum. Meas. 2007, 56, 2435–2451. [Google Scholar] [CrossRef]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Chen, Q.; De Soto, B.G.; Adey, B.T. Construction automation: Research areas, industry concerns and suggestions for advancement. Autom. Constr. 2018, 94, 22–38. [Google Scholar] [CrossRef]
- Agnisarman, S.; Lopes, S.; Madathil, K.C.; Piratla, K.; Gramopadhye, A. A survey of automation-enabled human-in-the-loop systems for infrastructure visual inspection. Autom. Constr. 2019, 97, 52–76. [Google Scholar] [CrossRef]
- Martinez, P.; Al-Hussein, M.; Ahmad, R. A scientometric analysis and critical review of computer vision applications for construction. Autom. Constr. 2019, 107, 102947. [Google Scholar] [CrossRef]
- Wilson, J.N.; Gader, P.; Lee, W.-H.; Frigui, H.; Ho, K.C. A Large-Scale Systematic Evaluation of Algorithms Using Ground-Penetrating Radar for Landmine Detection and Discrimination. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2560–2572. [Google Scholar] [CrossRef]
- Rehman, S.K.U.; Ibrahim, Z.; Memon, S.A.; Jameel, M. Nondestructive test methods for concrete bridges: A review. Constr. Build. Mater. 2016, 107, 58–86. [Google Scholar] [CrossRef] [Green Version]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection—A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Taheri, S. A review on five key sensors for monitoring of concrete structures. Constr. Build. Mater. 2019, 204, 492–509. [Google Scholar] [CrossRef]
- Dabous, S.A.; Feroz, S. Condition monitoring of bridges with non-contact testing technologies. Autom. Constr. 2020, 116, 103224. [Google Scholar] [CrossRef]
- Khan, K.S.; Kunz, R.; Kleijnen, J.; Antes, G. Five steps to conducting systematic review. J. R. Soc. Med. 2003, 96, 118–121. [Google Scholar] [CrossRef]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gotzche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Klejinen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care intervention. PLoS Med. 2009, 6, E1–E34. [Google Scholar] [CrossRef] [PubMed]
- Grant, M.; Booth, A. A typology of reviews: An analysis of 14 review types and associated methodologies. Health Inf. Libr. J. 2009, 26, 91–108. [Google Scholar] [CrossRef] [PubMed]
- McHugh, M.L. Interrater reliability: The kappa statistic. Biochem. Med. 2012, 2, 276–282. [Google Scholar] [CrossRef]
- Tolstoy, I.; Usdin, E. Dispersive properties of stratified elastic and liquid media: A ray theory. Geophysics 1953, 18, 844–870. [Google Scholar] [CrossRef]
- Morey, R.M.; Kovacs, A. Detection of Moisture in Construction Materials; Cold Region Research and Engineering Laboratory: Hannover, NH, USA, 1977. [Google Scholar]
- More, J.R.; Erhard, J.D. Radar Detection of Voids under Concrete Highways; Georgia Institute of Technology: Altanta, GA, USA, 1978. [Google Scholar]
- Moore, W.M.; Wift, G.; Milberger, L.J. An Instrument for Detecting Delamination in Concrete Bridge Decks, Dallas; A&M University: Texas, TX, USA, 1970. [Google Scholar]
- Clemena, G.G.; McKeel, W.T. Detection of delamination in bridge decks with infrared thermography. Transp. Res. Rec. 1978, 664, 180–182. [Google Scholar]
- Cawkell, A.E.; Akroyd, T.N.W. The investigation of the quality of thick concrete by ultrasonic pulse porpagation. Mag. Concr. Res. 1958, 10, 143. [Google Scholar] [CrossRef]
- Wilson, G.B. Some aspects on data fusion. In Advances in Command, Control & Communication Systems; Harris, C.J., Ed.; P. Peregrinus: London, UK, 1987; pp. 321–338. [Google Scholar]
- Jain, A.K.; Dubuisson, M.P.; Madhukar, M.S. Multi-sensor fusion for nondestructive inspection of fiber reinforced composite materials. In Proceedings of the 6th Technical Conference of the American Society of Composites, Albany, NY, USA, 7–9 October 1991; pp. 941–950. [Google Scholar]
- Gibb, S.; La, H.M.; Le, T.; Nguyen, L.; Schmid, R.; Pham, N. Non-destructive evaluation sensor fusion with autonomous robotic system for civil infrastructure inspection. J. Field Robot. 2018, 35, 988–1004. [Google Scholar] [CrossRef]
- Pham, N.H.; La, H.M. Design and implementation of an autonomous robot for steel bridge inspection. In Proceedings of the 2016 54th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 27–30 September 2016; pp. 556–562. [Google Scholar]
- Sirken, A.; Knizhnik, G.; McWilliams, J.; Bergbreiter, S. Bridge risk investigation diagnostic grouped exploratory (BRIDGE) bot. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, 24–28 September 2017; pp. 6526–6532. [Google Scholar]
- La, H.M.; Gucunski, N.; Kee, S.-H.; Yi, J.; Senlet, T.; Nguyen, L. Autonomous robotic system for bridge deck data collection and analysis. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 1950–1955. [Google Scholar]
- Murphy, R.R.; Steimle, E.; Hall, M.; Lindemuth, M.; Trejo, D.; Hurlebaus, S.; Medina-Cetina, Z.; Slocum, D. Robot-Assisted Bridge Inspection. J. Intell. Robot. Syst. 2011, 64, 77–95. [Google Scholar] [CrossRef]
- Mueller, C.A.; Fromm, T.; Buelow, H.; Birk, A.; Garsch, M.; Gebbeken, N. Robotic bridge inspection within strategic flood evacuation planning. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Ratsamee, P.; Kriengkomol, P.; Arai, T.; Kamiyama, K.; Mae, Y.; Kiyokawa, K.; Mashita, T.; Uranishi, Y.; Takemura, H. A hybrid flying and walking robot for steel bridge inspection. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 62–67. [Google Scholar]
- Jimenez-Cano, A.; Braga, J.; Heredia, G.; Ollero, A. Aerial manipulator for structure inspection by contact from the underside. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1879–1884. [Google Scholar]
- Ikeda, T.; Yasui, S.; Fujihara, M.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Wall contact by octo-rotor UAV with one DoF manipulator for bridge inspection. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5122–5127. [Google Scholar]
- Kriengkomol, P.; Kamiyama, K.; Kojima, M.; Horade, M.; Mae, Y.; Arai, T. New tripod walking method for legged inspection robot. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1078–1083. [Google Scholar]
- Kaur, P.; Dana, K.J.; Romero, F.A.; Gucunski, N. Automated GPR Rebar Analysis for Robotic Bridge Deck Evaluation. IEEE Trans. Cybern. 2015, 46, 2265–2276. [Google Scholar] [CrossRef]
- Prasanna, P.; Dana, K.J.; Gucunski, N.; Basily, B.B.; La, H.M.; Lim, R.S.; Parvardeh, H. Automated Crack Detection on Concrete Bridges. IEEE Trans. Autom. Sci. Eng. 2014, 13, 591–599. [Google Scholar] [CrossRef]
- La, H.M.; Lim, R.S.; Basily, B.; Gucunski, N.; Yi, J.; Maher, A.; Romero, F.A.; Parvardeh, H.; Maher, A. Autonomous robotic system for high-efficiency non-destructive bridge deck inspection and evaluation. In Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, 17–21 August 2013; pp. 1053–1058. [Google Scholar]
- Le, T.; Gibb, S.; Pham, N.; La, H.M.; Falk, L.; Berendsen, T. Autonomous robotic system using non-destructive evaluation methods for bridge deck inspection. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3672–3677. [Google Scholar]
- Lim, R.S.; La, H.M.; Shan, Z.; Sheng, W. Developing a crack inspection robot for bridge maintenance. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; 2011; pp. 6288–6293. [Google Scholar]
- Nguyen, S.T.; La, H.M. Development of a Steel Bridge Climbing Robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1912–1917. [Google Scholar]
- Zheng, Z.; Hu, S.; Ding, N. A Biologically Inspired Cable Climbing Robot: CCRobot-Design and Implementation. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 2354–2359. [Google Scholar]
- Zheng, M.; Yang, M.; Yuan, X.; Ding, N. A Light-Weight Wheel-Based Cable Inspection Climbing Robot: From Simulation to Reality. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1365–1370. [Google Scholar]
- Pack, R.T.; Christopher, J.L.; Kawamura, K. A Rubbertuator-based structure-climbing inspection robot. In Proceedings of the International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 11–15 May 2002; pp. 1869–1874. [Google Scholar]
- Liu, Q.; Liu, Y. An approach for auto bridge inspection based on climbing robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 2581–2586. [Google Scholar]
- Li, X.; Gao, C.; Guo, Y.; He, F.; Shao, Y. Cable surface damage detection in cable-stayed bridges using optical techniques and image mosaicking. Opt. Laser Technol. 2019, 110, 36–43. [Google Scholar] [CrossRef]
- Cho, K.H.; Jin, Y.H.; Kim, H.M.; Moon, H.; Koo, J.C.; Choi, H.R. Caterpillar-based cable climbing robot for inspection of suspension bridge hanger rope. In Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, 17–21 August 2013; pp. 1059–1062. [Google Scholar]
- Leibbrandt, A.; Caprari, G.; Angst, U.; Siegwart, R.Y.; Flatt, R.J.; Elsener, B. Climbing robot for corrosion monitoring of reinforced concrete structures. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012; pp. 10–15. [Google Scholar]
- Nguyen, S.T.; Pham, A.Q.; Motley, C.; La, H.M. A Practical Climbing Robot for Steel Bridge Inspection. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–4 June 2020. [Google Scholar]
- Pham, A.Q.; La, H.M.; La, K.T.; Nguyen, M.T. A Magnetic Wheeled Robot for Steel Bridge Inspection. In Proceedings of the International Conference on Engineering Research and Applications (ICERA), Moscow, Russia, 24–26 October 2019; pp. 11–17. [Google Scholar]
- Bui, H.-D.; Nguyen, S.T.; Billah, U.-H.; Le, C.; Tavakkoli, A.; La, H.M. Control Framework for a Hybrid-steel Bridge Inspection Robot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Zheng, Z.; Ding, N. Design and Implementation of CCRobot-II: A Palm-based Cable Climbing Robot for Cable-stayed Bridge Inspection. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9747–9753. [Google Scholar]
- Cho, K.H.; Jin, Y.H.; Kim, H.M.; Choi, H.R. Development of novel multifunctional robotic crawler for inspection of hanger cables in suspension bridges. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 2673–2678. [Google Scholar]
- Kriengkomol, P.; Kamiyama, K.; Kojima, M.; Horade, M.; Mae, Y.; Arai, T. Hammering sound analysis for infrastructure inspection by leg robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2015; pp. 887–892. [Google Scholar]
- Cho, K.H.; Kim, H.M.; Jin, Y.H.; Liu, F.; Moon, H.; Koo, J.C.; Choi, H.R. Inspection Robot for Hanger Cable of Suspension Bridge: Mechanism Design and Analysis. IEEE/ASME Trans. Mechatron. 2013, 18, 1665–1674. [Google Scholar] [CrossRef]
- Zheng, Z.; Yuan, X.; Huang, H.; Yu, X.; Ding, N. Mechanical Design of a Cable Climbing Robot for Inspection on a Cable-Stayed Bridge. In Proceedings of the World Congress on Intelligent Control and Automation, Changsha, China, 4–8 July 2018; pp. 1680–1684. [Google Scholar]
- Cho, K.H.; Jin, Y.H.; Kim, H.M.; Koo, J.C.; Moon, H.; Choi, H.R. Multifunctional Robotic Crawler for Inspection of Suspension Bridge Hanger Cables: Mechanism Design and Performance Validation. IEEE/ASME Trans. Mechatron. 2017, 22, 236–246. [Google Scholar] [CrossRef]
- Andrikopoulos, G.; Papadimitriou, A.; Brusell, A.; Nikolakopoulos, G. On Model-based Adhesion Control of a Vortex Climbing Robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1460–1465. [Google Scholar]
- La, H.M.; Lim, R.S.; Basily, B.; Gucunski, N.; Yi, J.; Maher, A.; Romero, F.A.; Parvardeh, H. Mechatronic and control systems design for an autonomous robotic system for high-efficiency bridge deck inspection and evaluation. IEEE Trans. Mechatron. 2013, 18, 1655–1664. [Google Scholar] [CrossRef] [Green Version]
- Morozovsky, N.; Bewley, T. SkySweeper: A low DOF, dynamic high wire robot. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 2339–2344. [Google Scholar]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge deck delamination identification from unmanned aerial vehicle infrared imagery. Autom. Constr. 2016, 72, 155–165. [Google Scholar] [CrossRef]
- Xie, R.; Yao, J.; Liu, K.; Lu, X.; Liu, Y.; Xia, M.; Zeng, Q. Automatic multi-image stitching for concrete bridge inspection by combining point and line features. Autom. Constr. 2018, 90, 265–280. [Google Scholar] [CrossRef]
- Seo, J.; Duque, L.; Wacker, J. Drone-enabled bridge inspection methodology and application. Autom. Constr. 2018, 94, 112–126. [Google Scholar] [CrossRef]
- Sakuma, M.; Kobayashi, Y.; Emaru, T.; Ravankar, A.A. Mapping of pier substructure using UAV. In Proceedings of the IEEE International Symposium on System Integration, Sapporo, Japan, 13–15 December 2016; pp. 361–366. [Google Scholar]
- Asa, K.; Funabora, Y.; Doki, S.; Doki, K. Measuring position determination for accurate and efficient visual inspection using UAV. In Proceedings of the IEEE the International Symposium on System Integration, Taipei, Taiwan, 11–14 December 2017; pp. 188–193. [Google Scholar]
- Abiko, S.; Harada, T.; Hasegawa, T.; Yuta, S.; Shimaji, N. Semi-autonomous Collision Avoidance Flight Using Two Dimensional Laser Range Finder with Mirrors for Bridge Inspection. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 2268–2272. [Google Scholar]
- Jiang, B.W.; Kuo, C.H.; Peng, K.J.; Peng, K.C.; Hsiung, S.H.; Kuo, C.M. Thrust Vectoring Control for Infrastructure Inspection Multirotor Vehicle. In Proceedings of the 2019 IEEE 6th International Conference on Industrial Engineering and Applications (ICIEA), Tokyo, Japan, 26–29 April 2019; pp. 209–213. [Google Scholar]
- Gucunski, N.; Basily, B.; Kim, J.; Yi, J.; Duong, T.; Dinh, K.; Kee, S.-H.; Maher, A. RABIT: Implementation, performance validation and integration with other robotic platforms for improved management of bridge decks. Int. J. Intell. Robot. Appl. 2017, 1, 271–286. [Google Scholar] [CrossRef]
- DeVault, J. Robotic system for underwater inspection of bridge piers. IEEE Instrum. Meas. Mag. 2000, 3, 32–37. [Google Scholar] [CrossRef]
- Cano, A.E.J.; Sanchez-Cuevas, P.; Grau, P.; Ollero, A.; Heredia, G. Contact-Based Bridge Inspection Multirotors: Design, Modeling, and Control Considering the Ceiling Effect. IEEE Robot. Autom. Lett. 2019, 4, 3561–3568. [Google Scholar] [CrossRef]
- Myeong, W.; Koo, J. Development of a Wall-Climbing Drone Capable of Vertical Soft Landing Using a Tilt-Rotor Mechanism. IEEE Access 2018, 7, 4868–4879. [Google Scholar] [CrossRef]
- Ladig, R.; Shimonomura, K. High precision marker based localization and movement on the ceiling employing an aerial robot with top mounted omni wheel drive system. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; pp. 3081–3086. [Google Scholar]
- Sanchez-Cuevas, P.J.; Heredia, G.; Ollero, A. Multirotor UAS for bridge inspection by contact using the ceiling effect. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Maimi, FL, USA, 13–16 June 2017; pp. 767–774. [Google Scholar]
- Ichikawa, A.; Abe, Y.; Ikeda, T.; Ohara, K.; Kishikawa, J.; Ashizawa, S.; Oomichi, T.; Okino, A.; Fukuda, T. UAV with Manipulator for Bridge Inspection: Hammering system for mounting to UAV. In Proceedings of the IEEE International Symposium on System Integration, Taipei, Taiwan, 11–14 December 2017; pp. 775–780. [Google Scholar]
- Guan, Y.; Zhu, H.; Wu, W.; Zhou, X.; Jiang, L.; Cai, C.; Zhang, L.; Zhang, H. A Modular Biped Wall-Climbing Robot With High Mobility and Manipulating Function. IEEE/ASME Trans. Mechatron. 2012, 18, 1787–1798. [Google Scholar] [CrossRef]
- Minor, M.; Dulimarta, H.; Danghi, G.; Mukherjee, R.; Tummala, R.L.; Aslam, D. Design, implementation, and evaluation of an under-actuated miniature biped climbing robot. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No.00CH37113), Takamatsu, Japan, 31 October–5 November 2002; pp. 1999–2005. [Google Scholar]
- Lim, R.S.; La, H.M.; Sheng, W. A Robotic Crack Inspection and Mapping System for Bridge Deck Maintenance. IEEE Trans. Autom. Sci. Eng. 2014, 11, 367–378. [Google Scholar] [CrossRef]
- Gucunski, N.; Kee, S.H.; La, H.M.; Kim, J.; Lim, R.; Parvardeh, H. Bridge Deck Surveys on Eight Illinois Tollways Bridges Using Robotics Assisted Bridge Inspection Tool; Applied Research Associates: Champaign, IL, USA, 2014. [Google Scholar]
- Gibb, S.; Le, T.; La, H.M.; Schmid, R.; Berendsen, T. A multi-functional inspection robot for civil infrastructure evaluation and maintenance. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2672–2677. [Google Scholar]
- Van Nguyen, L.; Gibb, S.; Pham, H.X.; La, H.M. A Mobile Robot for Automated Civil Infrastructure Inspection and Evaluation. In Proceedings of the IEEE Symposium on Safety, Security and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Guan, D.; Yan, L.; Yang, Y.; Xu, W. A small climbing robot for the intelligent inspection of nuclear power plants. In Proceedings of the 2014 4th IEEE International Conference on Information Science and Technology, Guangdong, China, 24–28 April 2014; pp. 484–487. [Google Scholar]
- Hirose, S.; Najakubo, A.; Toyama, R. Machine that can walk and climb on floors, walls and ceilings. In Proceedings of the Fifth International Conference on Advanced Robotics and Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; Volume 1, pp. 753–758. [Google Scholar]
- Luk, B.L.; Cooke, D.S.; Galt, S.; Collie, A.A.; Chen, S. Intelligent legged climbing service robot for remote maintenance applications in hazardous environments. Robot. Auton. Syst. 2005, 53, 142–152. [Google Scholar] [CrossRef] [Green Version]
- Balaguer, C.; Gimenez-Fernandez, A.; Abderrahim, C.; Abderrahim, M. ROMA robots for inspection of steel based infrastructures. Ind. Robot. Int. J. 2002, 29, 246–251. [Google Scholar] [CrossRef]
- Longo, D.; Muscato, G. The Alicia Climbing Robot. IEEE Robot. Autom. Lett. 2006, 13, 42–50. [Google Scholar] [CrossRef]
- Liu, Y.; Dai, Q.; Liu, Q. Adhesion-adaptive control of a novel bridge-climbing robot. In Proceedings of the 2013 IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, Nanjing, China, 26–29 May 2013; pp. 102–107. [Google Scholar]
- Jung, S.; Song, S.; Kim, S.; Park, J.; Her, J.; Roh, K.; Myung, H. Toward Autonomous Bridge Inspection: A framework and experimental results. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, South Korea, 24–27 June 2019; pp. 208–211. [Google Scholar]
- Gucunski, N.; Kee, S.H.; La, H.M.; Lim, R.; Parvardeh, H. Bridge Deck Surveys on Four New Jersey Tollway Bridges Using Robotics Assisted Bridge Inspection Tool; Parsons Brinckerhoff Inc.: Lawrenceville, NJ, USA, 2014. [Google Scholar]
- La, H.M.; Dinh, T.H.; Pham, N.H.; Ha, Q.; Pham, A.Q. Automated robotic monitoring and inspection of steel structures and bridges. Robotica 2018, 37, 947–967. [Google Scholar] [CrossRef] [Green Version]
- Pham, N.H.; La, H.M.; Ha, Q.; Dang, S.N.; Vo, A.H.; Dinh, Q.H. Visual and 3D Mapping for Steel Bridge Inspection Using a Climbing Robot. In Proceedings of the 33nd International Symposium on Automation and Robotics in Construction and Mining (ISARC), Auburn, AL, USA, 18–21 July 2016; pp. 141–149. [Google Scholar]
- Diamanti, N.; Redman, D. Field observations and numerical models of GPR response from vertical pavement cracks. J. Appl. Geophys. 2012, 81, 106–116. [Google Scholar] [CrossRef]
- Mazzeo, B.A.; Larsen, J.; McElderry, J.; Guthrie, W.S. Rapid multichannel impact-echo scanning of concrete bridge decks from a continuously moving platform. In Proceedings of the 43rd Annual Review of Progress in Quantitative Nondestructive Evaluation, Atlanta, GA, USA, 17–22 July 2017; Volume 1806, p. 080003. [Google Scholar]
- Zhu, J.; Popovics, J.S. Non-Contact NDT of Concrete Structures Using Air Coupled Sensors; University of Illinois at Urbana-Champaign: Urbana, IL, USA, 2008; pp. 1–6. [Google Scholar]
- Zhu, J.; Popovics, J.S. Imaging concrete structures using air-coupled impact-echo. J. Eng. Mech. 2007, 133, 628–640. [Google Scholar] [CrossRef]
- Ashlock, J.C.; Phares, B.; Lu, J. Evaluation of Air-Coupled Impact-Echo Test Method; Department of Transporation: Washington, DC, USA, 2015.
- Lin, S.; Ashlock, J.C. Comparison of MASW and MSOR for surfave wave testing of pavements. J. Env. Eng. Geophys. 2015, 20, 277–285. [Google Scholar] [CrossRef]
- Sun, H.; Zhu, J.; Ham, S. Acoustic evaluation of concrete delaminations using ball-chain impact excitation. J. Acoust. Soc. Am. 2017, 141, EL477–EL481. [Google Scholar] [CrossRef] [Green Version]
- Gucunski, N.; Imani, A.; Romero, F.; Nazarian, S.; Yuan, D.; Wiggenhauser, H.; Shokouhi, P.; Taffe, A.; Kutrubes, D. Strategic Highway Research Program Renewal Focus Area. In Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; The National Academies Press: Washington, DC, USA, 2012. [Google Scholar]
- Malhotra, M.; Nicholas, C. CRC Handbook on Nondestructive Testing of Concrete; CRC Press Inc.: Boca Raton, FL, USA, 2004. [Google Scholar]
- Dong, Y.; Ansari, F. Non-destructive testing and evaluation (NDT/NDE) of civil structures rehabilitated using fiber reinforced polymer (FRP) composites. In Service Life Estimation and Extension of Civil Engineering Structures; Elsevier: Amsterdam, The Netherlands, 2011; pp. 193–222. [Google Scholar]
- Zhang, Y.; Xie, H.Z. Ensemble empirical mode decompisition in the impact-echo test. NDT&E Int. 2012, 51, 74–84. [Google Scholar]
- Abraham, O.; Popovics, J.S. Non-Destructive Evaluation of Reinforced Concrete Structures: Non-Destructive Testing Methods; Elsevier Inc.: London, UK, 2010. [Google Scholar]
- Lee, I.; Kwon, S.-H.; Park, J.; Oh, T. The effective near-surface defect identification by dynamic behavior associated with both impact-echo and flexural modes for concrete structures. KSCE J. Civ. Eng. 2017, 22, 747–754. [Google Scholar] [CrossRef]
- Meng, D.; Azari, H. Reducing Thermal Reflections for Infrared Thermography Applications on Tunnel Liners with Reflective Finishes. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 145–155. [Google Scholar] [CrossRef]
- Kobayashi, K.; Banthia, N. Corrosin detection in reinforced concrete using induction heating and infrared thermography. J. Civ. Struct. Health Monit. 2011, 1, 25–35. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L. Application of passive infrared thermography for the detection of defects in concrete bridge elements. In Proceedings of the International Conference of the Transporation Association of Canada, Toronto, ON, Canada, 22–28 September 2016; pp. 1–12. [Google Scholar]
- Washer, G.; Dawson, J.; Ruiz-Fabian, P.; Sultan, A.; Trial, M.; Fuchs, P. Field Testing of Hand-Held Infrared Thermography, Phase II TPF-5(247) Final Report; Missouri Department of Transportation: Jefferson, MO, USA, 2016.
- Sakagami, T.; Izumi, Y.; Shiozawa, D.; Fujimoto, T.; Mizokami, Y.; Hanai, T. Nondestructive Evaluation of Fatigue Cracks in Steel Bridges Based on Thermoelastic Stress Measurement. Procedia Struct. Integr. 2016, 2, 2132–2139. [Google Scholar] [CrossRef] [Green Version]
- Zou, B.; Luo, Z.; Wang, J.; Wang, G.; Hu, L. Infrared thermography analysis of tunnel surrounding rock damage under blasting. J. Eng. Blasting 2016, 4, 1–6. [Google Scholar]
- Barla, G.; Antolini, F.; Gigli, G. 3D Laser scanner and thermography for tunnel discontinuity mapping. Geomech. Tunn. 2016, 9, 29–36. [Google Scholar] [CrossRef]
- Feng, X. Rockburst: Mechanism, Monitoring, Warning and Mitigation; Butterworth-Heinemann: Waltham, MA, USA, 2017. [Google Scholar]
- Rana, S.; Fanguiero, R. Advanced Composite Materials for Aerospace Engineering: Processing, Properties and Applications; Woodhead Publishing: Cambridge, UK, 2016. [Google Scholar]
- Ciampa, F.; Mahmoodi, P.; Pinto, F.; Meo, M. Recent Advances in Active Infrared Thermography for Non-Destructive Testing of Aerospace Components. Sensors 2018, 18, 609. [Google Scholar] [CrossRef] [Green Version]
- Popovics, J.S. NDE techniques for concrete and masonry structures. Prog. Struct. Eng. Mater. 2003, 5, 49–59. [Google Scholar] [CrossRef]
- Yehia, S.; Abudayyeh, O.; Nabulsi, S.; Abdelqader, I. Detection of Common Defects in Concrete Bridge Decks Using Nondestructive Evaluation Techniques. J. Bridg. Eng. 2007, 12, 215–225. [Google Scholar] [CrossRef]
- Cheng, C.-C.; Cheng, T.-M.; Chiang, C.-H. Defect detection of concrete structures using both infrared thermography and elastic waves. Autom. Constr. 2008, 18, 87–92. [Google Scholar] [CrossRef]
- Kee, S.-H.; Oh, T.K.; Popovics, J.S.; Arndt, R.W.; Zhu, J. Nondestructive Bridge Deck Testing with Air-Coupled Impact-Echo and Infrared Thermography. J. Bridg. Eng. 2012, 17, 928–939. [Google Scholar] [CrossRef]
- Oh, T.K.; Kee, S.-H.; Arndt, R.W.; Popovics, J.S.; Zhu, J. Comparison of NDT Methods for Assessment of a Concrete Bridge Deck. J. Eng. Mech. 2013, 139, 305–314. [Google Scholar] [CrossRef]
- Gucunski, N.; Imani, A.; Romero, F.; Nazarian, S.; Yuan, D.; Wiggenhauser, H.; Shokouhi, P.; Taffe, A.; Kutrubes, D. SHRP 2 Report S2-R06A-RR-1: Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; Transportation Research Board of the National Academies: Washington, DC, USA, 2013. [Google Scholar]
- Washer, G.; Fenwick, R.; Bolleni, N.; Harper, J. Effects of Environmental Variables on Infrared Imaging of Subsurface Features of Concrete Bridges. Transp. Res. Rec. J. Transp. Res. Board 2009, 2108, 107–114. [Google Scholar] [CrossRef]
- Vaghefi, K.; Ahlborn, T.M.; Harris, D.; Brooks, C.N. Combined Imaging Technologies for Concrete Bridge Deck Condition Assessment. J. Perform. Constr. Facil. 2015, 29, 04014102. [Google Scholar] [CrossRef]
- Cheng, C.; Shen, Z. Time-series based thermography on concrete block void detection. arXiv 2018, arXiv:preprint/1802.04869. [Google Scholar]
- Busse, N. Using an Infrared Camera to Inspect a Bridge Deck, 29 August 2013. Available online: https://mntransportationresearch.org/2013/08/29/using-an-infrared-camera-to-inspect-a-bridge-deck/ (accessed on 2 February 2020).
- Gibb, S.; La, H.M. Automated Rebar Detection for Ground-Penetrating Radar. In Proceedings of the 12th International Symposium on Visual Computing, Las Vegas, NV, USA, 12–14 December 2016; pp. 815–825. [Google Scholar]
- Dinh, K.; Gucunski, N.; Duong, T.H. An algorithm for automatic localization and detection of rebars from GPR data of concrete bridge decks. Autom. Constr. 2018, 89, 292–298. [Google Scholar] [CrossRef]
- Ahmed, H.; La, H.M.; Gucunski, N. Rebar Detection using Ground Penetrating Radar with State-of-the-Art Convolutional Neural Networks. In Proceedings of the 9th International Conference on Structural Health Monitoring of Intelligent infrastructure, St. Louis, MI, USA, 4–7 August 2019; pp. 1–6. [Google Scholar]
- Ahmed, H.; La, H.M.; Pekcan, G. Rebar Detection and Localization for Non-destructive Infrastructure Evaluation of Bridges Using Deep Residual Networks. In Proceedings of the 14th International Symposium on VIsual Computing, Lake Tahoe, NV, USA, 7–9 October 2019; pp. 1–6. [Google Scholar]
- Dou, Q.; Wei, L.; Magee, D.R.; Cohn, A. Real-Time Hyperbola Recognition and Fitting in GPR Data. IEEE Trans. Geosci. Remote Sens. 2016, 55, 51–62. [Google Scholar] [CrossRef] [Green Version]
- Torrione, P.A.; Morton, K.D.; Sakaguchi, R.; Collins, L.M. Histogram of Oriented Gradient for landmine detection in ground penetrating radar data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1539–1550. [Google Scholar] [CrossRef]
- Torrione, P.; Collins, L.M. Texture Features for Antitank Landmine Detection Using Ground Penetrating Radar. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2374–2382. [Google Scholar] [CrossRef]
- Hugenschmidt, J. Concrete bridge inspection with a mobile GPR system. Constr. Build. Mater. 2002, 16, 147–154. [Google Scholar] [CrossRef]
- Shihab, S.; Al-Nuaimy, W. Radius estimation for cylindrical objects detectino by ground penetrating radar. Int. J. Sens. Imaging 2005, 6, 151–166. [Google Scholar]
- Feng, X.; Yu, Y.; Liu, C.; Fehler, M. Subsurface polarimetric migration imaging for full polarimetric ground-penetrating radar. Geophys. J. Int. 2015, 202, 1324–1338. [Google Scholar] [CrossRef] [Green Version]
- Pasolli, E.; Melgani, F.; Donelli, M. Automatic Analysis of GPR Images: A Pattern-Recognition Approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2206–2217. [Google Scholar] [CrossRef]
- Mertens, L.; Persico, R.; Matera, L.; Lambot, S. Automated detection of reflection hyperbolas in complex GPR images in no a priori knolwedge on the medium. IEEE Trans. Geosci. Remote Sens. 2016, 54, 580–596. [Google Scholar] [CrossRef]
- Al-Nuaimy, W.; Huang, Y.; Nakhkash, M.; Fang, M.; Nguyen, V.; Eriksen, A. Automatic detection of buried utilities and solid objects with GPR using neural networks and pattern recognition. J. Appl. Geophys. 2000, 43, 157–165. [Google Scholar] [CrossRef]
- Gamba, P.; Lossani, S. Neural detection of pipe signatures in ground penetrating radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 790–797. [Google Scholar] [CrossRef]
- Annan, A.P. Electromagnetic Principles of Ground Penetrating Radar. In Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2009; pp. 1–40. [Google Scholar]
- Annan, A.P. Ground penetrating radar. In Near Surface Geophysics; Elsevier: Amsterdam, The Netherlands, 2005; pp. 3–40. [Google Scholar]
- Li, D.; Cong, A.; Guo, S. Sewer damage detection from imbalanced CCTV inspection data using deep convolutional neural networks with hierarchical classification. Autom. Constr. 2019, 101, 199–208. [Google Scholar] [CrossRef]
- Ren, Y.; Huang, J.; Hong, Z.; Lu, W.; Yin, J.; Zou, L.; Shen, X. Image-based concrete crack detection in tunnels using deep fully convolutional networks. Constr. Build. Mater. 2020, 234, 117367. [Google Scholar] [CrossRef]
- Menendez, E.; Victores, J.; Montero, R.; Martínez, S.; Balaguer, C. Tunnel structural inspection and assessment using an autonomous robotic system. Autom. Constr. 2018, 87, 117–126. [Google Scholar] [CrossRef]
- Wang, L.; Kawaguchi, K.; Wang, P. Damaged ceiling detection and localization in large-span structures using convolutional neural networks. Autom. Constr. 2020, 116, 103230. [Google Scholar] [CrossRef]
- Maeda, H.; Sekimoto, Y.; Seto, T.; Kashiyama, T.; Omata, H. Road Damage Detection and Classification Using Deep Neural Networks with Smartphone Images. Comput. Civ. Infrastruct. Eng. 2018, 33, 1127–1141. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Sha, A.; Hu, L.; Li, S. Convolutional Neural Network for Asphalt Pavement Surface Texture Analysis. Comput. Civ. Infrastruct. Eng. 2018, 33, 1056–1072. [Google Scholar] [CrossRef]
- Zhou, S.; Song, W. Deep learning-based roadway crack classification using laser-scanned range images: A comparative study on hyperparameter selection. Autom. Constr. 2020, 114, 1–17. [Google Scholar] [CrossRef]
- Dai, B.; Gu, C.; Zhao, E.; Zhu, K.; Cao, W.; Qin, X. Improved online sequential extreme learning machine for identifying crack behavior in concrete dam. Adv. Struct. Eng. 2018, 22, 402–412. [Google Scholar] [CrossRef]
- Zhang, K.; Cheng, H.; Zhang, B. Unified Approach to Pavement Crack and Sealed Crack Detection Using Preclassification Based on Transfer Learning. J. Comput. Civ. Eng. 2018, 32, 04018001. [Google Scholar] [CrossRef]
- Song, M.; Civco, D. Road Extraction Using SVM and Image Segmentation. Photogramm. Eng. Remote Sens. 2004, 70, 1365–1371. [Google Scholar] [CrossRef] [Green Version]
- Ying, L.; Salari, E. Beamlet transform-based technique for pavement crack detection and classifcation. Comput. Aided Civ. Infrastructural Eng. 2010, 25, 572–580. [Google Scholar] [CrossRef]
- Zalama, E.; Gómez-García-Bermejo, J.; Medina, R.; Llamas, J. Road Crack Detection Using Visual Features Extracted by Gabor Filters. Comput. Civ. Infrastruct. Eng. 2013, 29, 342–358. [Google Scholar] [CrossRef]
- Dinh, T.H.; Ha, Q.P.; La, H.M. Computer vision-based method for concrete crack detection. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar]
- Park, S.E.; Eem, S.-H.; Jeon, H. Concrete crack detection and quantification using deep learning and structured light. Constr. Build. Mater. 2020, 252, 119096. [Google Scholar] [CrossRef]
- Rivera, J.P.; Josipovic, G.; Lejeune, E.; Luna, B.N.; Whittaker, A.S. Automated Detection and Measurement of Cracks in Reinforced Concrete Components. ACI Struct. J. 2015, 112, 397–407. [Google Scholar] [CrossRef]
- Merazi-Meksen, T.; Boudraa, M.; Boudraa, B. Mathematical morphology for TOFD image analysis and automatic crack detection. Ultrasonics 2014, 54, 1642–1648. [Google Scholar] [CrossRef] [PubMed]
- Maierhofer, C.; Zacher, G.; Kohl, C.; Wöstmann, J. Evaluation of Radar and Complementary Echo Methods for NDT of Concrete Elements. J. Nondestruct. Eval. 2008, 27, 47–57. [Google Scholar] [CrossRef]
- Ploix, M.-A.; Garnier, V.; Breysse, D.; Moysan, J. NDE data fusion to improve the evaluation of concrete structures. NDT&E Int. 2011, 44, 442–448. [Google Scholar] [CrossRef]
- Masoom, H.; Adve, R.S.; Cobbold, R.S. Target detection in diagnostic ultrasound: Evaluation of a method based on the CLEAN algorithm. Ultrasonics 2013, 53, 335–344. [Google Scholar] [CrossRef]
- Wright, D.C.; Miltreyger, A.; Bron, A.; Rabinovich, S. 1000 Gates-A novel approach and method for ultrasonic inspection of aero-engine disc forgings. In Proceedings of the British Institute of NDT Conference, Telford, UK, 10–12 September 2013; pp. 1–6. [Google Scholar]
- Halmshaw, R. Non-destructive testing. 2nd ed. NDT&E Int. 1992, 25, 234. [Google Scholar] [CrossRef]
- Brierley, N.; Tippetts, T.; Cawley, P. Data fusion for automated non-destructive inspection. Proc. R. Soc. A 2014, 470, 20140167. [Google Scholar] [CrossRef]
- Windsor, C.G.; Capineri, L. Automated object positioning from ground penetrating images. Insights 1998, 40, 482–488. [Google Scholar]
- Zhang, Y.; Roshan, A.; Jahari, S.; Khiabani, S.A.; Fathollahi, F.; Mishra, B.K. Understanding the quality of pan sharpening- A lab study. Photogramm. Eng. Remote Sens. 2016, 82, 747–755. [Google Scholar] [CrossRef]
- Duraisamy, B. Track level fusion of extended objects from heterogeneous sensors. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 1–6. [Google Scholar]
- Heideklang, R.; Shokouhi, P. Application of data fusion in nondestructive testing (NDT). In Proceedings of the 16th Internatinoal Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 835–841. [Google Scholar]
- Friedrich, M.; Pierce, S.G.; Galbraith, W.; Hayward, G. Data fusion in automated robotic inspection systems. Insight-Non-Destr. Test. Cond. Monit. 2008, 50, 88–94. [Google Scholar] [CrossRef]
- Moysan, J.; Durocher, A.; Gueudré, C.; Corneloup, G. Improvement of the non-destructive evaluation of plasma facing components by data combination of infrared thermal images. NDT&E Int. 2007, 40, 478–485. [Google Scholar] [CrossRef]
- Williams, R.R.; Abdallah, J.; Nazarian, S. Implementation of Data Fusion Techniques in Nondestructive Testing of Pavements; Center for Transportation Infrastructure Systems, University of Texas at El Paso: Texas, TX, USA, 2004. [Google Scholar]
- Billah, U.H.; La, H.M.; Tavakkoli, A.; Gucunski, N. Classification of concrete crack using deep residual networks. In Proceedings of the International Conference on Structural Health Monitoring (SHMII-9), St. Louis, MI, USA, 4–7 August 2019; pp. 1–6. [Google Scholar]
- Gibb, S.; La, H.M.; Louis, S. A genetic algoritjm for convolutional network structure optimization for concrete crack detection. In Proceedings of the IEEE Congress on Evolutionary Computation, Rio de Janiero, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Billah, U.H.; Tavakkoli, A.; La, H.M. Concrete crack pixel classification using an encoder decoder based deep learning architecture. In Proceedings of the International Symposium on Visual Computing, Lake Tahoe, NV, USA, 7–9 October 2019; pp. 593–604. [Google Scholar]
- Li, G.; He, S.; Ju, Y.; Du, K. Long-distance precision inspection method for bridge cracks with image processing. Autom. Constr. 2014, 41, 83–95. [Google Scholar] [CrossRef]
- Fujita, Y.; Hamamoto, Y. A robust automatic crack detection method from noisy concrete surfaces. Mach. Vis. Appl. 2010, 22, 245–254. [Google Scholar] [CrossRef]
- Chen, J.-H.; Su, M.-C.; Cao, R.; Hsu, S.-C.; Lu, J.-C. A self organizing map optimization based image recognition and processing model for bridge crack inspection. Autom. Constr. 2017, 73, 58–66. [Google Scholar] [CrossRef]
- Oh, J.-K.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.-J.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with machine vision. Autom. Constr. 2009, 18, 929–941. [Google Scholar] [CrossRef]
- Li, G.; Zhao, X.; Du, K.; Ru, F.; Zhang, Y. Recognition and evaluation of bridge cracks with modified active contour model and greedy search-based support vector machine. Autom. Constr. 2017, 78, 51–61. [Google Scholar] [CrossRef]
- Liu, Z.; Cao, Y.; Wang, Y.; Wang, W. Computer vision-based concrete crack detetion using U-net fully convolutional networks. Autom Constr. 2019, 104, 129–139. [Google Scholar] [CrossRef]
- Dung, C.V.; Anh, L.D. Autonomous concrete crack detection using deep fully convolutional neural network. Autom. Constr. 2019, 99, 52–58. [Google Scholar] [CrossRef]
- Broberg, P. Surface crack detection in welds using thermography. NDT&E Int. 2013, 57, 69–73. [Google Scholar] [CrossRef]
- Sinha, S.K.; Fieguth, P.W. Automated detection of cracks in buried concrete pipe images. Autom. Constr. 2006, 15, 58–72. [Google Scholar] [CrossRef]
- Wang, P.; Huang, H. Comparison analysis on present image-based crack detection methods in concrete structures. In Proceedings of the 3rd Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; pp. 2530–2533. [Google Scholar]
- Jahanshahi, M.R.; Masri, S.F. Adaptive vision-based crack detection using 3D scene reconstruction for condition assessment of structures. Autom. Constr. 2012, 22, 567–576. [Google Scholar] [CrossRef]
- Alam, S.; Loukili, A.; Grondin, F.; Rozière, E. Use of the digital image correlation and acoustic emission technique to study the effect of structural size on cracking of reinforced concrete. Eng. Fract. Mech. 2015, 143, 17–31. [Google Scholar] [CrossRef]
- Brooks, W.S.M.; Lamb, D.; Irvine, S. IR Reflectance Imaging for Crystalline Si Solar Cell Crack Detection. IEEE J. Photovolt. 2015, 5, 1–5. [Google Scholar] [CrossRef]
- Iliopoulos, S.; Aggelis, D.; Pyl, L.; Vantomme, J.; Van Marcke, P.; Coppens, E.; Areias, L. Detection and evaluation of cracks in the concrete buffer of the Belgian Nuclear Waste container using combined NDT techniques. Constr. Build. Mater. 2015, 78, 369–378. [Google Scholar] [CrossRef]
- Hamrat, M.; Boulekbache, B.; Chemrouk, M.; Amziane, S. Flexural cracking behavior of normal strength, high strength and high strength fiber concrete beams, using Digital Image Correlation technique. Constr. Build. Mater. 2016, 106, 678–692. [Google Scholar] [CrossRef]
- Xu, C.; Xie, J.; Chen, G.; Huang, W. Crack detection of reinforced concrete bridge using video image. J. Cent. South Univ. 2013, 20, 2605–2613. [Google Scholar] [CrossRef]
- Glud, J.; Dulieu-Barton, J.M.; Thomsen, O.; Overgaard, L. Automated counting of off-axis tunnelling cracks using digital image processing. Compos. Sci. Technol. 2016, 125, 80–89. [Google Scholar] [CrossRef] [Green Version]
- Vidal, M.; Ostra, M.; Imaz, N.; García-Lecina, E.; Ubide, C. Analysis of SEM digital images to quantify crack network pattern area in chromium electrodeposits. Surf. Coat. Technol. 2016, 285, 289–297. [Google Scholar] [CrossRef]
- Li, X.; Jiang, H.; Yin, G. Detection of surface crack defects on ferrite magnetic tile. NDT&E Int. 2014, 62, 6–13. [Google Scholar] [CrossRef]
- Kabir, S. Imaging-based detection of AAR induced map-crack damage in concrete structure. NDT&E Int. 2010, 43, 461–469. [Google Scholar] [CrossRef]
- Anwar, S.; Abdullah, M. Micro-crack detection of multicrystalline solar cells featuring an improved anisotropic diffusion filter and image segmentation technique. Eurasip J. Image Video Process. 2014, 2014, 15. [Google Scholar] [CrossRef] [Green Version]
- Dhital, D.; Lee, J.-R. A Fully Non-Contact Ultrasonic Propagation Imaging System for Closed Surface Crack Evaluation. Exp. Mech. 2011, 52, 1111–1122. [Google Scholar] [CrossRef]
- Guo, X.; Vavilov, V. Crack detection in aluminium parts by using ultrasound-excited infrasred thermography. Infrared Phys. Technol. 2013, 61, 149–156. [Google Scholar] [CrossRef]
- Meksen, T.M.; Boudraa, B.; Drai, R.; Boudraa, M. Automatic Crack Detection and Characterization During Ultrasonic Inspection. J. Nondestruct. Eval. 2010, 29, 169–174. [Google Scholar] [CrossRef]
- Abdel-Qader, I.; Abudayyeh, O.; Kelly, M.E. Analysis of Edge-Detection Techniques for Crack Identification in Bridges. J. Comput. Civ. Eng. 2003, 17, 255–263. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Mizutani, T.; Tarumi, M.; Su, D. Sensitive Damage Detection of Reinforced Concrete Bridge Slab by “Time-Variant Deconvolution” of SHF-Band Radar Signal. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1478–1488. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous Structural Visual Inspection Using Region-Based Deep Learning for Detecting Multiple Damage Types. Comput. Civ. Infrastruct. Eng. 2017, 33, 731–747. [Google Scholar] [CrossRef]
- Gopalakrishnan, K.; Khaitan, S.K.; Choudhary, A.N.; Agrawal, A. Deep Convolutional Neural Networks with transfer learning for computer vision-based data-driven pavement distress detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Camilo, J.; Wang, R.; Collins, L.M.; Bradbury, K.; Malof, J.M. Application of a Semantic Segmentation Convolutional Neural Network for Accurate Automatic Detection and Mapping of Solar Photovoltaic Arrays in Aerial Imagery. arXiv 2018, arXiv:1801.04018. [Google Scholar]
- Teichmann, M.; Weber, M.; Zoellner, M.; Cipolla, R.; Urtasun, R. Multinet: Real-time joint semantic reasoning for autonmous driving. In Proceedings of the IEEE Intelligent Vehicles Symposium, Changshu, China, 26–30 June 2018; pp. 1013–1020. [Google Scholar]
- Zou, Q.; Zhang, Z.; Li, Q.; Qi, X.; Wang, Q.; Wang, S. DeepCrack: Learning Hierarchical Convolutional Features for Crack Detection. IEEE Trans. Image Process. 2019, 28, 1498–1512. [Google Scholar] [CrossRef] [PubMed]
- Bang, S.; Park, S.; Kim, H.; Kim, H. Encoder–decoder network for pixel-level road crack detection in black-box images. Comput. Civ. Infrastruct. Eng. 2019, 34, 713–727. [Google Scholar] [CrossRef]
- Zhang, X.; Rajan, D.; Story, B. Concrete crack detection using context-aware deep semantic segmentation network. Comput. Civ. Infrastruct. Eng. 2019, 34, 951–971. [Google Scholar] [CrossRef]
- Zhang, D.; Li, Q.; Chen, Y.; Cao, M.; He, L.; Zhang, B. An efficient and reliable coarse-to-fine approach for asphalt pavement crack detection. Image Vis. Comput. 2017, 57, 130–146. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Li, B.; Yang, E.; Dai, X.; Peng, Y.; Fei, W.; Liu, Y.; Li, J.Q.; Chen, C. Automated pixel-level pavement crack detection on 3D asphalt surfaces using a deep-learning framework. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 805–819. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Fei, Y.; Liu, Y.; Tao, S.; Chen, C.; Li, J.Q.; Li, B. Deep Learning–Based Fully Automated Pavement Crack Detection on 3D Asphalt Surfaces with an Improved CrackNet. J. Comput. Civ. Eng. 2018, 32, 04018041. [Google Scholar] [CrossRef] [Green Version]
- Fei, Y.; Wang, K.C.P.; Zhang, A.; Chen, C.; Li, Q.J.; Liu, Y.; Yang, G.; Li, B. Pixel-Level Cracking Detection on 3D Asphalt Pavement Images Through Deep-Learning- Based CrackNet-V. IEEE Trans. Intell. Transp. Syst. 2020, 21, 273–284. [Google Scholar] [CrossRef]
- Jin, S.; Lee, S.E.; Hong, J.-W. A vision-based approach for autonomous crack width measurement with flexible kernel. Autom. Constr. 2020, 110, 103019. [Google Scholar] [CrossRef]
- Wang, Z.W.; Zhou, M.; Slabaugh, G.; Zhai, J.; Fang, T. Automatic Detection of Bridge Deck Condition From Ground Penetrating Radar Images. IEEE Trans. Autom. Sci. Eng. 2010, 8, 633–640. [Google Scholar] [CrossRef]
- Moysey, S.; Knight, R.J.; Jol, H.M. Texture-based classification of ground-penetrating radar images. Geophysics 2006, 71, K111–K118. [Google Scholar] [CrossRef]
- Janning, R.; Schmidt-Thieme, L.; Busche, A.; Horvath, T. Pipe localization by apex detection. In Proceedings of the IET International Conference on Radar Systems, Glasgow, UK, 22–25 October 2012; pp. 1–6. [Google Scholar]
- Maas, C.; Schmalzl, J. Using pattern recognition to automatically localize reflection hyperbolas in data from ground penetrating radar. Comput. Geosci. 2013, 58, 116–125. [Google Scholar] [CrossRef]
- Fritze, M. Detection of buried landmines using ground penetrating radar. In Proceedings of the SPIE, Orlando, FL, USA, 17–21 April 1995; Volume 2496, p. 100108. [Google Scholar]
- Yuan, C.; Li, S.; Cai, H.; Kamat, V.R. GPR Signature Detection and Decomposition for Mapping Buried Utilities with Complex Spatial Configuration. J. Comput. Civ. Eng. 2018, 32, 04018026. [Google Scholar] [CrossRef]
- Shaw, M.R.; Millard, S.G.; Molyneaux, T.C.K.; Taylor, M.J.; Bungey, J.H. Location of steel reinforcement in concrete using ground penetrating radard and neural networks. NDT&E Int. 2005, 38, 203–212. [Google Scholar]
- Simi, A.; Manacorda, G.; Benedetto, A. Bridge deck survey with high resolution Ground Penetrating Radar. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 489–495. [Google Scholar]
- Wang, T.; Oristaglio, M.L. GPR imaging using the generalized Radon transform. Geophysics 2000, 65, 1553–1559. [Google Scholar] [CrossRef]
- Capineri, L.; Grande, P.; Temple, J.A.G. Advanced image-processing technique for real-time interpretation of ground-penetrating radar images. Int. J. Imaging Syst. Technol. 1998, 9, 51–59. [Google Scholar] [CrossRef]
- Windsor, C.G.; Capineri, L.; Falorni, P. The Estimation of Buried Pipe Diameters by Generalized Hough Transform of Radar Data. Piers Online 2005, 1, 345–349. [Google Scholar] [CrossRef] [Green Version]
- Windsor, C.G.; Capineri, L.; Falorni, P. A Data Pair-Labeled Generalized Hough Transform for Radar Location of Buried Objects. IEEE Geosci. Remote Sens. Lett. 2014, 11, 124–127. [Google Scholar] [CrossRef]
- Borgioli, G.; Capineri, L.; Falorni, P.; Matucci, S.; Windsor, C.G. The Detection of Buried Pipes From Time-of-Flight Radar Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2254–2266. [Google Scholar] [CrossRef]
- Delbo, S.; Gamba, P.; Roccato, D. A fuzzy shell clustering approach to recognize hyperbolic signatures in subsurface radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1447–1451. [Google Scholar] [CrossRef]
- Chen, H.; Cohn, A. Probabilistic robust hyperbola mixture model for interpreting ground penetrating radar data. In Proceedings of the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Chaudhuri, B.; Samanta, G. Elliptic fit of objects in two and three dimensions by moment of inertia optimization. Pattern Recognit. Lett. 1991, 12, 1–7. [Google Scholar] [CrossRef]
- Birkenfeld, S. Automatic detection of reflexion hyperbolas in GPR data with neural networks. In Proceedings of the World Automation Congress, Kyoto, Japan, 19–23 September 2010; pp. 1–6. [Google Scholar]
- Besaw, L.E.; Stimac, P.J. Deep convolutional neural networks for classifying GPR B-scans. In Proceedings of the Conference on Detection and Sensing of Mines, Explosive Objects, Baltimore, MD, USA, 20–24 April 2015; pp. 1–10. [Google Scholar]
- Ahmed, H.; La, H.M.; Tran, K. Rebar Detection and localization for bridge deck inspection and evaluation using deep residual network. In Automation in Construction; Elsevier: New York, NY, USA, In Review.
- Harkat, H.; Ruano, A.; Ruano, M.; Dosse, S.B. GPR target detection using a neural network classifier designed by a multi-objective genetic algorithm. Appl. Soft Comput. 2019, 79, 310–325. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Meaning | Abbreviation | Meaning |
|---|---|---|---|
| LTBP | Long-Term Bridge Performance Program | ROCIM | Robotic Crack Inspection and Mapping |
| FHWA | Federal High Way Administration | RABIT | Robotics-Assisted Bridge Inspection Tool |
| NDE | Non-Destructive Evaluation | USV | Unmanned Submersible Vehicle |
| NDT | Non-Destructive Testing | UGV | Unmanned Ground Vehicle |
| SHM | Structural Health Monitoring | UMV | Unmanned Marine Vehicle |
| IR | Infrared | UAV | Unmanned Aerial Vehicle |
| GPR | Ground-Penetrating Radar | RGB | Red Green Blue |
| UAS | Unmanned Aerial Systems | RGB-D | Red Green Blue Depth |
| IE | Impact-Echo | EM | Electro-Magnetic |
| ER | Electrical Resistivity | USW | Ultrasonic Surface Waves |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses | ASTM | American Society of Testing and Materials |
| HA | Habib Ahmed | CCTV | Closed Circuit Television |
| HML | Hung Manh La | CNN | Convolutional Neural Network |
| NG | Nenad Gucunski | RANSAC | Random Sample Consensus |
| YSI® UUV | YSI® Unmanned Undersea Vehicle | Sea-RAI | Sea Robot Assisted Inspection |
| BRIDGE | Bridge Risk Investigation Diagnostic Grouped Exploratory | LRF | Laser Range Finder |
| ETH | Eidgenössische Technische Hochschule | MRC IN-II | Multifunctional Robotic Crawler for Inspection-II |
| LIDAR | Light and Radar | ABI | Auto Bridge Inspection |
| ROV | Remotely Operated Vehicle | CCD | Charged Coupled Device |
| SONAR | Sound Navigation and Ranging | BYU | Bringham Young University |
| YOLO | You Only Look Once | SVM | Support Vector Machine |
| HOG | Histogram of Oriented Gradient | FCN | Fully Connected Network |
| NN | Neural Network | VGG | Visual Geometry Group |
| ARA | Advanced Robotics and Automation | ResNet | Residual Network |
| Author | Year | Focus | Limitations |
|---|---|---|---|
| Wilson et al. [19] | 2007 | This review explores different algorithms specific to landmine detection using GPR sensor. | The findings are not up to date. This review focuses on algorithms for data analysis for a single type of NDT/NDE sensor, i.e., GPR. The algorithms highlighted are restricted to a single application, i.e., landmine detection. |
| Liu et al. [14] | 2007 | A comprehensive evaluation of different NDT data fusion techniques. The survey also provides brief details regarding the performance evaluation and data visualization for selected applications. | The findings are not up to date. This survey does not include studies related to NDT data fusion techniques for infrastructures. This review does not examine data analyses techniques for single-sensor-based systems. |
| Khaleghi et al. [15] | 2013 | The review focuses on examining multi-sensor data fusion methodologies. The review explores different data-related issues (correlated, uncorrelated, inconsistent, conflicting, imperfect data) and algorithms for tackling specific data-related issues. | The findings are not up to date. This study does not attempt to link different issues and their algorithmic solutions with specific practical applications. The review does not explore specific issues related to NDT sensory data and relevant techniques. |
| Sakagami [13] | 2015 | This review examines the different NDE techniques for steel bridge cracks using IR thermography. The different surface-level and sub-surface-level algorithms for crack detection using IR thermography have been discussed. | This review only focuses on algorithms for data analysis for a single type of NDT/NDE sensor, i.e., IR thermography. The data analysis algorithms are restricted to a single application, i.e., crack detection in steel bridges. |
| Rehman et al. [20] | 2016 | The review examines different NDT methods for bridges using different sensors. For each NDT method, different applications and limitations are discussed. | The review does not assess the state-of-the-art in robotic NDT methods for bridges. |
| Chen et al. [16] | 2018 | The review examines construction automation using text mining approach. A clustering-based visualization of relevant research areas has been outlined. | The review does not focus on the various critical qualitative aspects (e.g., types of sensors, platforms, algorithms, and performance evaluation) for construction automation. |
| Rakha et al. [21] | 2018 | This review focuses on UAS applications towards SHM for building inspection. | This review only focuses on algorithms for data analysis for a single NDT/NDE sensor, i.e., IR thermography sensors. This review only focuses on the applications based on a single type of robotic platform, i.e., aerial robots. |
| Feng et al. [22] | 2018 | This review highlights different vision-based solutions and applications for SHM. The fundamental principles of vision-based systems are discussed (e.g., template matching, coordinate conversion, practical issues related to camera calibration). | This review only focuses on a single type of NDT/NDE sensor, i.e., vision-based sensors. The review is restricted to a single type of SHM application, i.e., visual inspection. The review does not highlight vision-based state-of-the-art systems for SHM. |
| Agnisarman et al. [17] | 2019 | This survey examined semi-autonomous systems developed for the visual inspection for the SHM of civil infrastructures. The different studies were classified in terms of application, autonomy, type of visual sensor used, navigational capabilities and algorithms for data analysis. | This review only focuses on algorithms for data analysis for a single type of NDT/NDE sensor, i.e., vision-based sensors. The data analysis algorithms focus on a single type of applications, i.e., visual inspection methods. This review only focuses on algorithms developed for buildings’ energy auditing applications. |
| Taheri [23] | 2019 | This review directly explores some of the different sensors used for SHM of concrete structures. For each type of sensor, their various benefits and drawbacks have also been discussed. | The different types of sensors highlighted are restricted to a single type of application, i.e., sensors for measuring and monitoring different properties of concrete. This review does not highlight the different data analysis algorithms for different sensors for SHM. |
| Martinez et al. [18] | 2019 | Scientometric review of vision-based systems developed for construction automation has been highlighted. A clustering-based visualization of relevant research areas is provided, along with focus towards keywords, authors, journals, country networks and author networks. | The review does not focus on the qualitative aspects of visual inspection solutions (e.g., type of sensors, types of algorithms, system performance). This review only examines the studies related to a single type of NDT/NDE sensor, i.e., vision-based sensors. |
| Dabous et al. [24] | 2020 | This review examines tools and techniques for four non-contact sensors (GPR, IR, laser scanners, photogrammetry) for SHM of bridges. The review also examines some of the different challenges towards the use of four non-contact sensors for the SHM of bridges. | The review only focuses on the platforms and systems developed using a single type of sensory modality, e.g., non-contact-based testing technologies. |
| Study | Platforms | NDE Sensors | NDE Sensor Fusion | SHM Data Analysis | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Robot | Human | IR | IE | ER | GPR | Vision | General | NDE-Centric | ||
| Wilson [19] | ||||||||||
| Liu [14] | ||||||||||
| Khaleghi [15] | ||||||||||
| Sakagami [13] | ||||||||||
| Rehman [20] | ||||||||||
| Chen [16] | ||||||||||
| Feng [22] | ||||||||||
| Rakha [21] | ||||||||||
| Agnisarman [17] | ||||||||||
| Taheri [23] | ||||||||||
| Martinez [18] | ||||||||||
| Dabous [24] | ||||||||||
| This review | ||||||||||
| Robotic Platforms | Robot Type | NDE Sensors | |||
|---|---|---|---|---|---|
| Radar | Vision | Acoustics | Electric | ||
| RABIT [12,40,47,49,51,70,79,88,89,99] | Wheeled | 1 GPR Array | 1 Canon ® Camera | IE and USW Arrays | 1 ER Probe |
| ROCIM [51,88] | Wheeled | 1 Canon ® Camera | |||
| ARA Lab Robot [37,50,90,91] | Wheeled | 1 GPR Array | 1 PrimeSense ® Camera 1 Stereo Camera | 2 ER Arrays | |
| ETH Zurich Climbing Robot [59] | Climbing | 1 Half-Cell Potential Mapper | |||
| BridgeBot [39] | Climbing | 1 ArduCAM® | |||
| Steel Bridge Climbing Robot [52,100,101] | Climbing | 2 Cameras | 1 Eddy Current Sensor | ||
| ABI Robot [56] | Climbing | 1 Camera | |||
| Caterpiller robot [58] | Climbing | ||||
| SkySweeper [71] | Climbing | ||||
| Cable Robot [57] | Sliding | 4 CCD Cameras | |||
| Cable Inspector [64,66] | Climbing | 3 Cameras | |||
| CCRobot-II [53,54,63] | Climbing | ||||
| MRC2 IN-II [68] | Sliding | 1 Camera | |||
| Quadrotor platform [81] | UAV | ||||
| Manipulator robot [44] | UAV | ||||
| Contact prism robot [84] | UAV | ||||
| Flying/walking platform [43] | Hybrid | ||||
| Octo-rotor platform [45] | UAV | ||||
| Quadrotor platform [76] | UAV | 1 Camera | |||
| Hammering platform [85] | UAV | 1 IE sensor | |||
| 3D Mapper Robot [98] | UAV | 1 3D LIDAR1 Camera | |||
| DJI® Phantom [74] | UAV | 1 Camera | |||
| 2D LRF Robot [77] | UAV | 1 2D LRF with Mirrors | |||
| Omni-Wheel Robot [83] | UAV | 2 Cameras | |||
| Infrared Imagery UAV [72] | UAV | 1 IR camera1 RGB camera | |||
| Underwater ROV [80] | USV | 1 Camera | |||
| Sea-RAI [41] | USV | 4 Cameras | |||
| Muddy Waters [42] | USV | 1 Stereo RGB-D Camera1 ARIS® Sonar | |||
| Videoray ROV [41] | USV | 1 Camera1 Imaging Sonar | |||
| YSI® Ecomapper [41] | USV | 1 Side-Scan Sonar | |||
| Study | Application | Dataset | Image Size | Algorithm | Performance |
|---|---|---|---|---|---|
| Li et al. [183] | Bridge | 1000 | N/A | Image Segmentation Algorithm | Accuracy: 92.6% Mean Error: 0.03 mm |
| Fujita et al. [184] | General | 60 | 640 × 480 | Locally Adaptive Thresholding | AuC: 98.0% |
| Chen et al. [185] | Bridge | 40 | 3088 × 2056 | Self-Organizing Map Optimization | Accuracy: 89–91% |
| Oh et al. [186] | Bridge | 80 | 640 × 480 | Morphological Operations | Accuracy: 94.1% |
| Li et al. [187] | Bridge | 1200 | 4288 × 2848 | Active Contour Model with SVM | Width Accuracy: 92.1% Mean Error: 0.03 mm |
| Liu et al. [188] | General | 84 | 512 × 512 | U-Net | Precision: 90.0% Recall: 91.0% F1-score: 90.0% |
| Ren et al. [152] | Tunnels | 409 | 4032 × 3016 | CrackSegNet | Precision: 66.07% Recall: 85.54% F1-score: 74.55% |
| Dung et al. [189] | General | 40,600 | 227 × 227 | FCN with VGG-16 | Precision: 90% Max-F1: 90% |
| Zhou et al. [157] | Road | 52,408 | 256 × 256 | ResNet | Precision: 99.7% Recall: 99.8% F1-score: 99.8% |
| Billah et al. [180] | Bridge | 43,996 | 256 × 256 | ResNet-50 | Accuracy = 94.0% |
| Park et al. [164] | General | 1800 | N/A | YOLO-V3-tiny | Thickness Error: 0.09 mmLength Error: 2.72 mm |
| Billah et al. [182] | Bridge | 12,000 | 256 × 256 | SegNet | Accuracy = 98.7% Error = 1.3% F1-score = 24.1% |
| Li et al. [151] | Sewer | 18,333 | 224 × 224 | ResNet-18 with Hierarchical SoftMax | Accuracy: 64.8% |
| Wang et al. [154] | Ceiling | 1953 | 400 × 600 | DCNN | Accuracy: 86.22% |
| Study | Features | Dataset | Rebar Detection Techniques | Performance | Rebar Localization Techniques | Performance |
|---|---|---|---|---|---|---|
| Dou et al. [138] | Edge Features | Synthetic + Real Data | C3 Algorithm + 3-Layer Feed-Forward NN | Recall: 0.704 Precision: 0.708 | Orthogonal Hyperbola Fitting | Time: 0.73 s/rebar |
| Kaur et al. [47] | HOG | 3 Bridges | SVM | Acc.: 91.98% | RANSAC + Hyperbola Fitting | Accuracy: 91.98% |
| Gibb et al. [135] | HOG | 4 Bridges | Naïve Bayes | Acc.: 95.05% | Precise Hyperbola Localization | Time: 32.4 s/image |
| Dinh et al. [136] | N/A | 26 Bridges | 24-layer CNN | Acc.: 99.6% | Rebar Picking | Accuracy: 99.6% |
| Ahmed et al. [138] | N/A | 6 Bridges | ResNet-50 | Acc.: 99.42% | K-Means Clustering | Accuracy: 94.52% Precision: 95.18% |
| Harkat et al. [240] | HOS cumulant | 133 radargrams | MOGA + 3-layer CNN | Acc.: 88.99% | Hough Transform | N/A |
| Ahmed et al. [239] | N/A | 9 Bridges | Deep ResNets | Train Acc.: 99.4% Val. Acc.: 97.20% | Novel Rebar Localization Algorithm | Accuracy: 91.91% Precision: 96.89% Recall: 94.41% F1-score: 95.58% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, H.; La, H.M.; Gucunski, N. Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms. Sensors 2020, 20, 3954. https://doi.org/10.3390/s20143954
Ahmed H, La HM, Gucunski N. Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms. Sensors. 2020; 20(14):3954. https://doi.org/10.3390/s20143954
Chicago/Turabian StyleAhmed, Habib, Hung Manh La, and Nenad Gucunski. 2020. "Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms" Sensors 20, no. 14: 3954. https://doi.org/10.3390/s20143954
APA StyleAhmed, H., La, H. M., & Gucunski, N. (2020). Review of Non-Destructive Civil Infrastructure Evaluation for Bridges: State-of-the-Art Robotic Platforms, Sensors and Algorithms. Sensors, 20(14), 3954. https://doi.org/10.3390/s20143954