Micromachined Accelerometers with Sub-µg/√Hz Noise Floor: A Review


 ,
,  ,
, 


 and
and 
Abstract
:1. Introduction
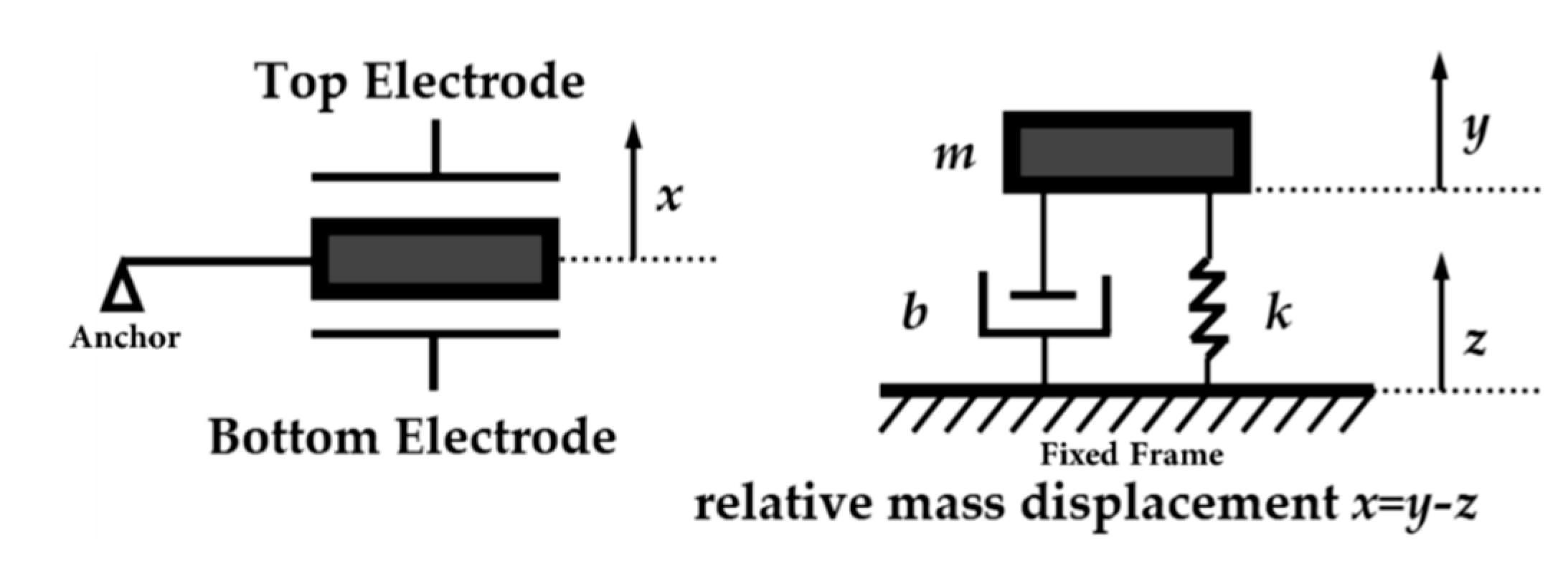
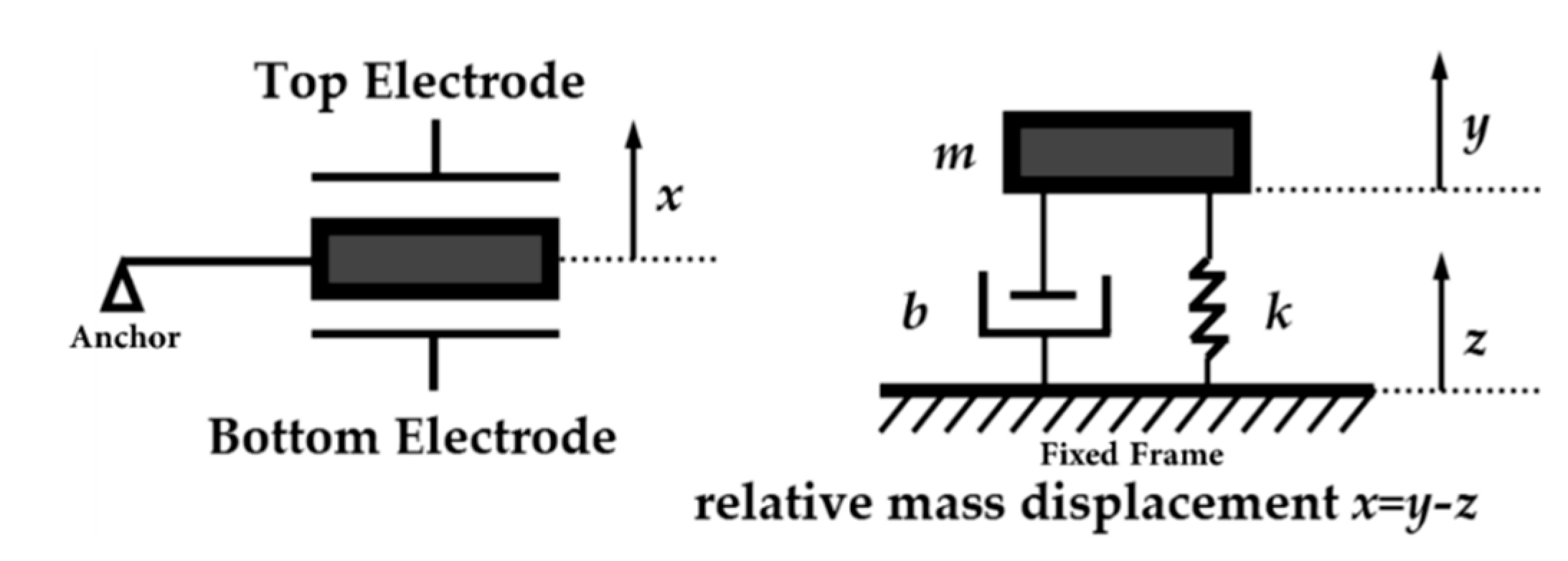
2. Micromachined Accelerometer Principles
3. MEMS Accelerometers with Novel Mechanical Design
3.1. MEMS Accelerometers with a Low Spring Constant
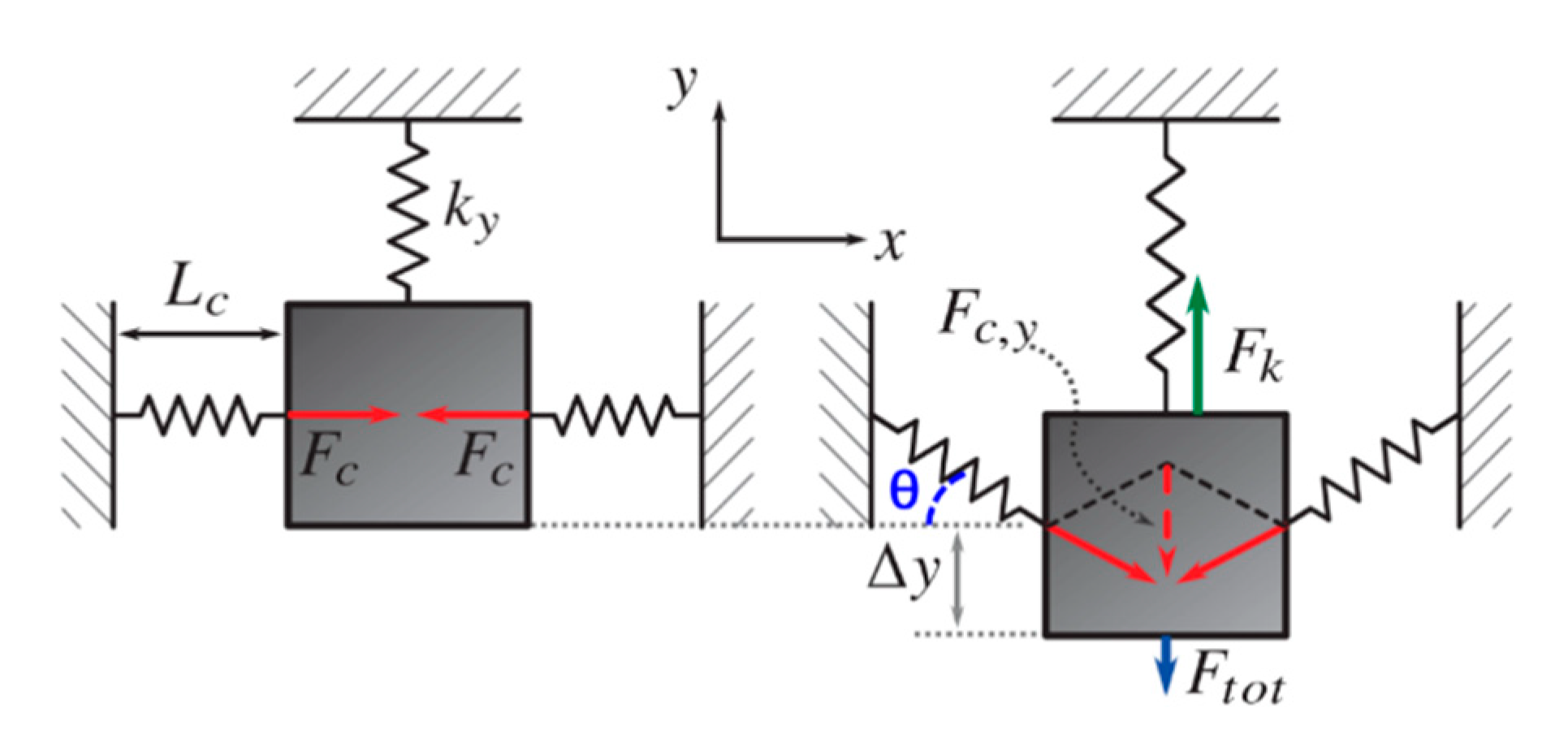
3.1.1. MEMS Accelerometers with Geometric Anti-Spring (GAS)
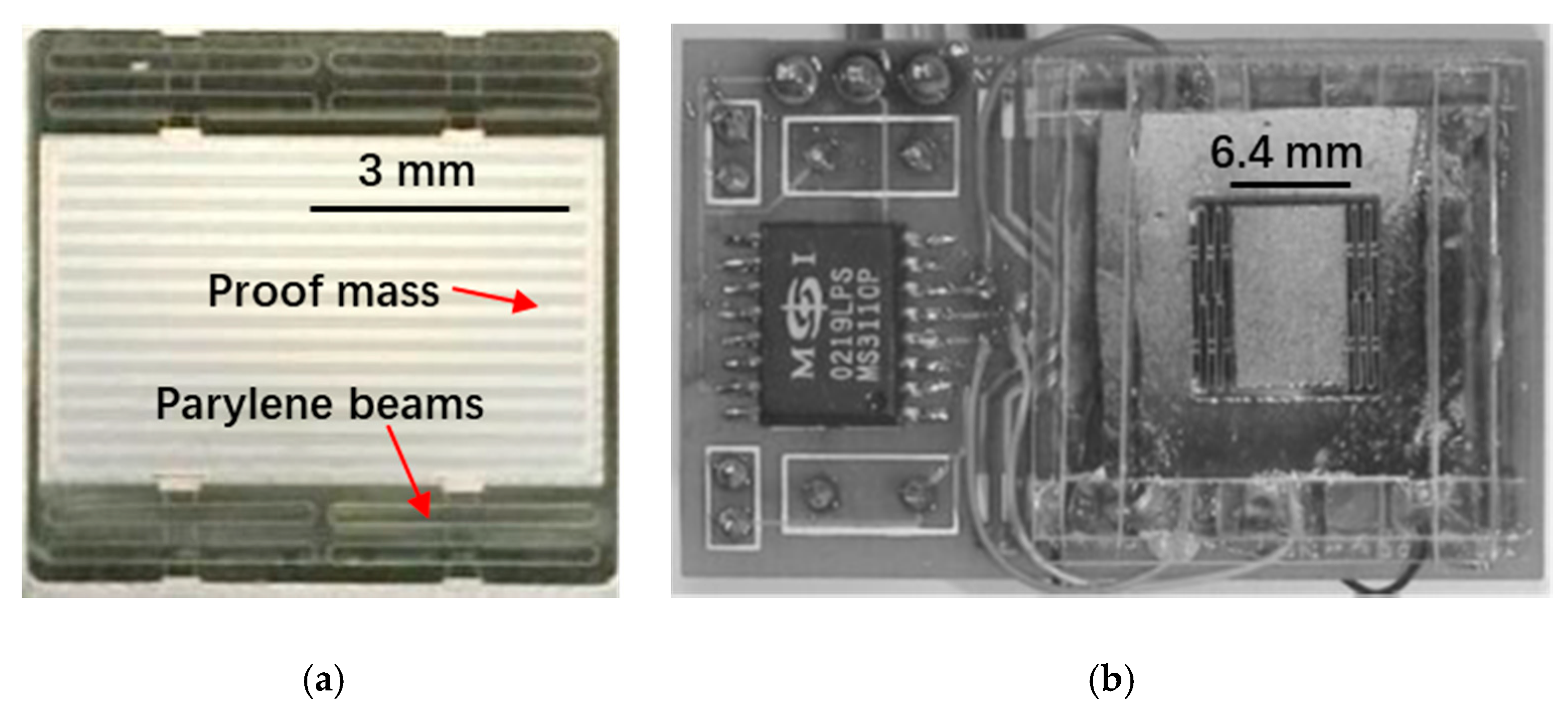
3.1.2. MEMS Accelerometers with Materials of Low Young’s Modulus
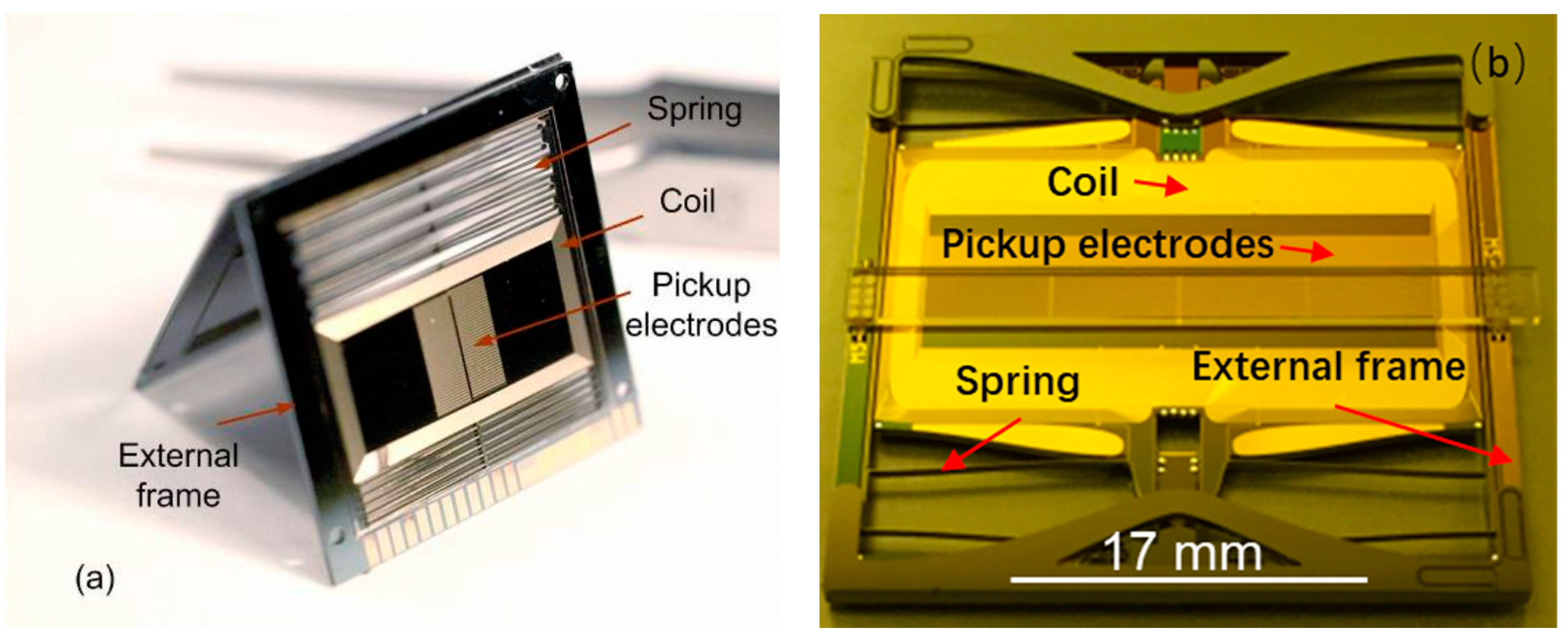
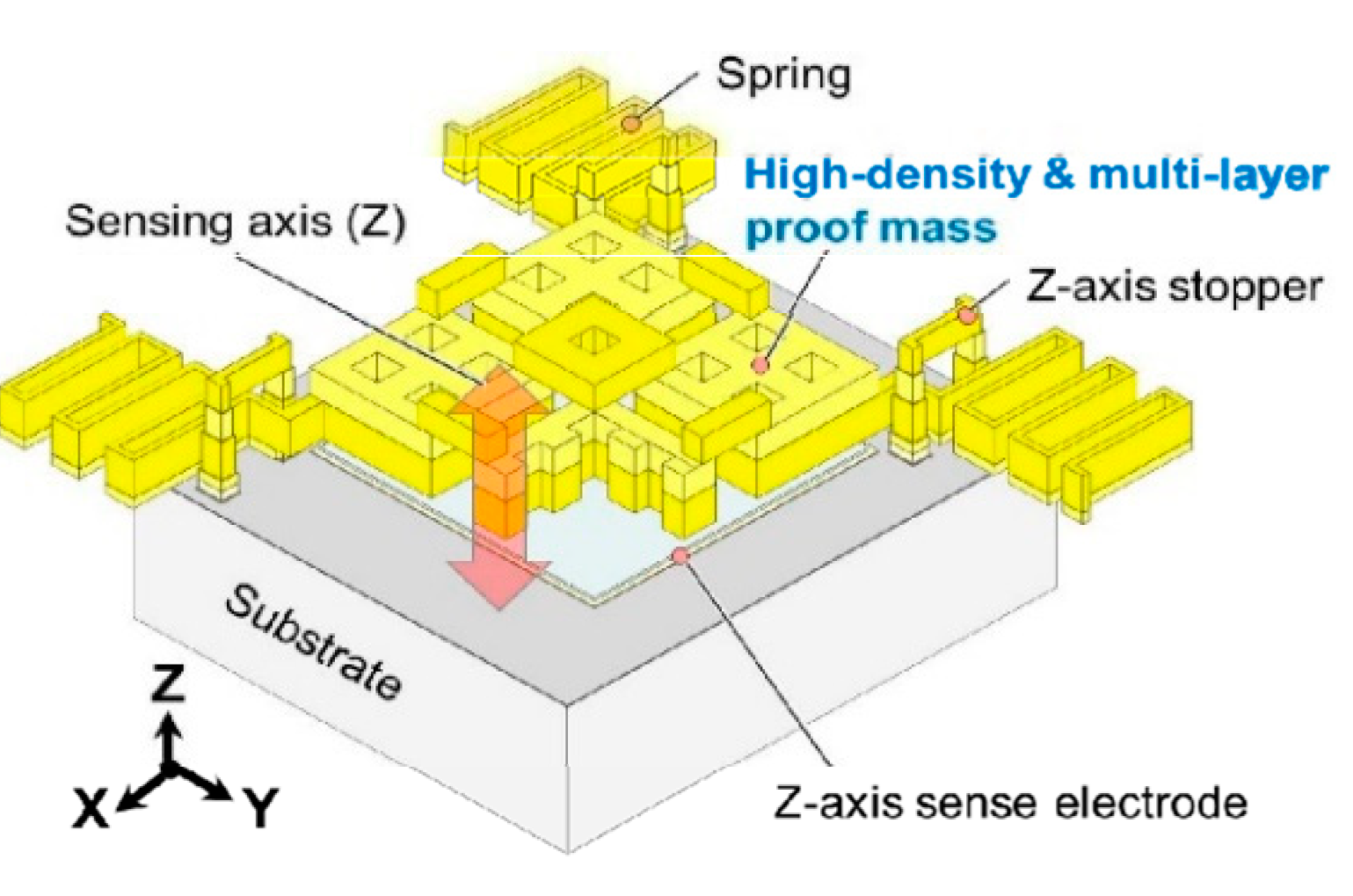
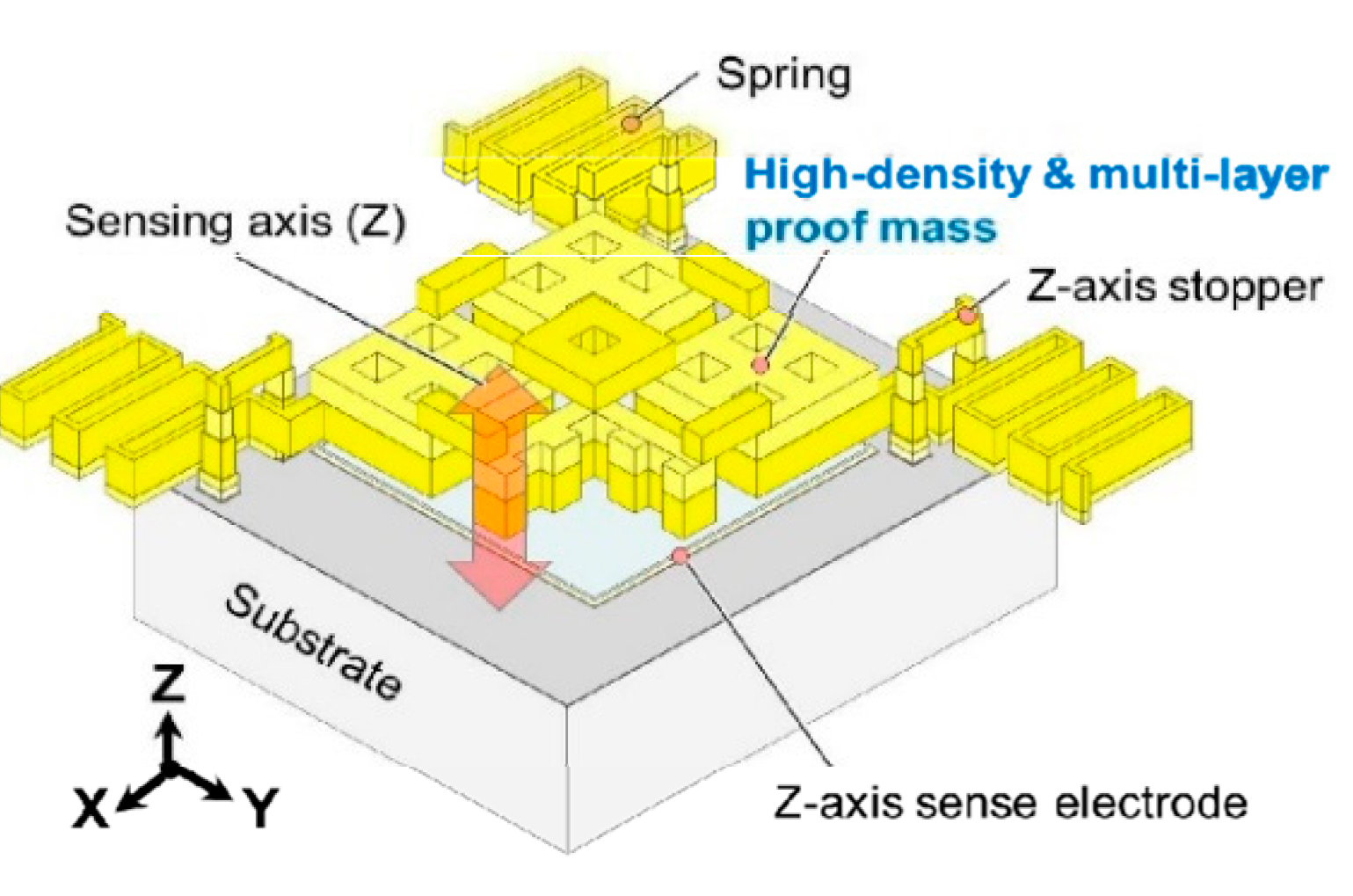
3.2. MEMS Accelerometers with a Large Proof Mass
4. MEMS Accelerometers with Vacuum Packaging
5. MEMS Accelerometers with a Low Noise Interface Circuit
6. MEMS Accelerometers with Signal Readout Methods of Higher Scale Factor
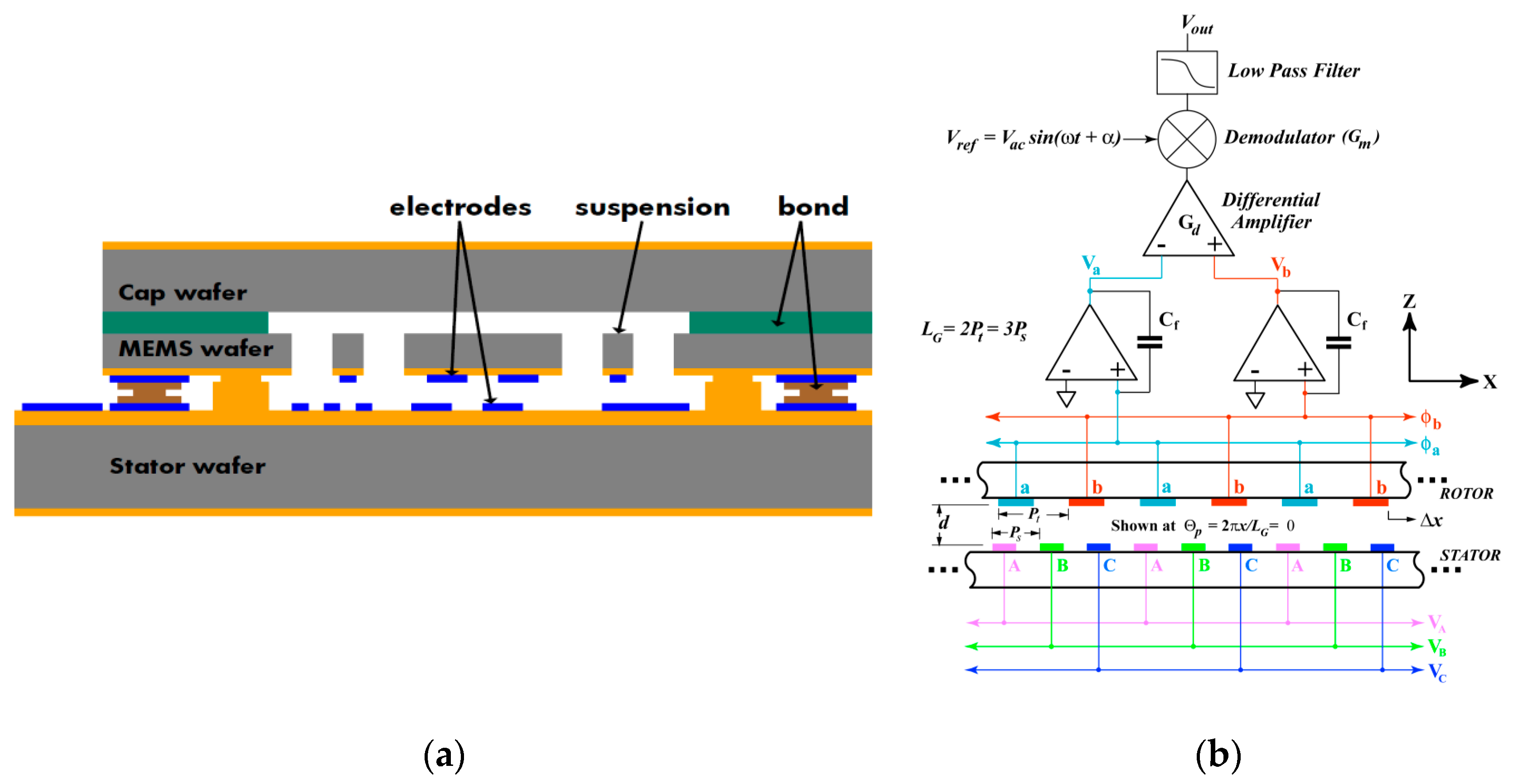
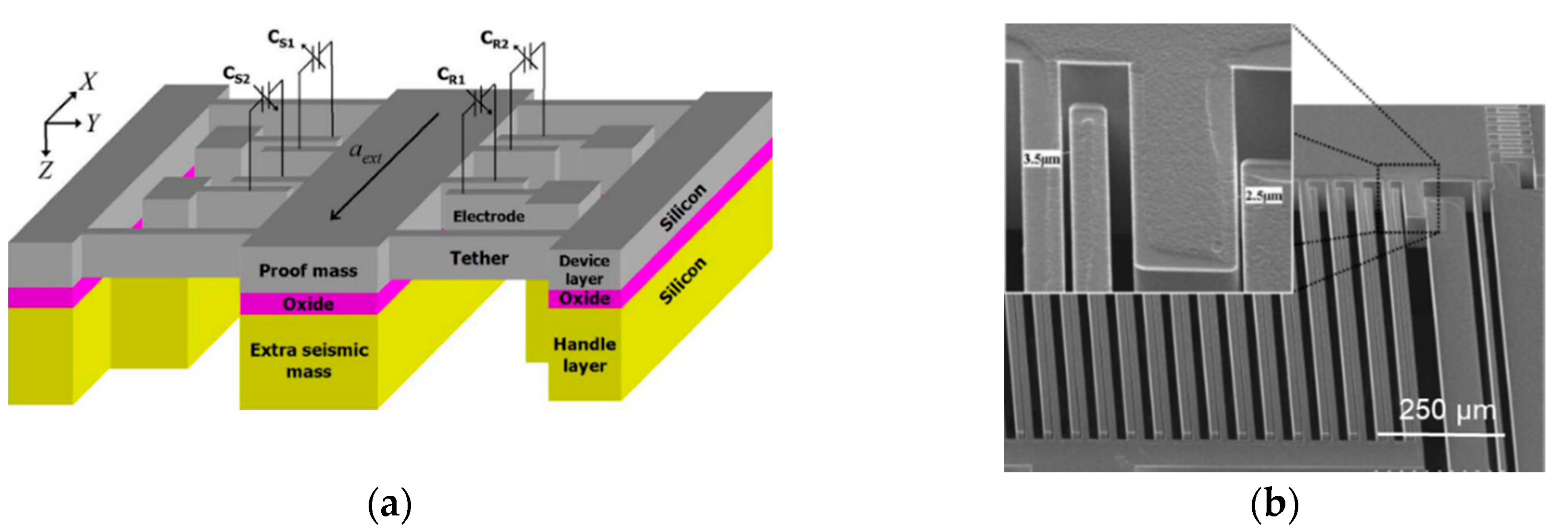
6.1. MEMS Accelerometers with High Aspect Ratio Capacitive Gaps
6.2. Optical MEMS Accelerometers
6.2.1. Resonant MEMS Accelerometers with Frequency Readout
6.2.2. Resonant MEMS Accelerometers with Amplitude Ratio Readout (Based on Mode Localization Effect)
6.2.3. MEMS Tunneling Accelerometers
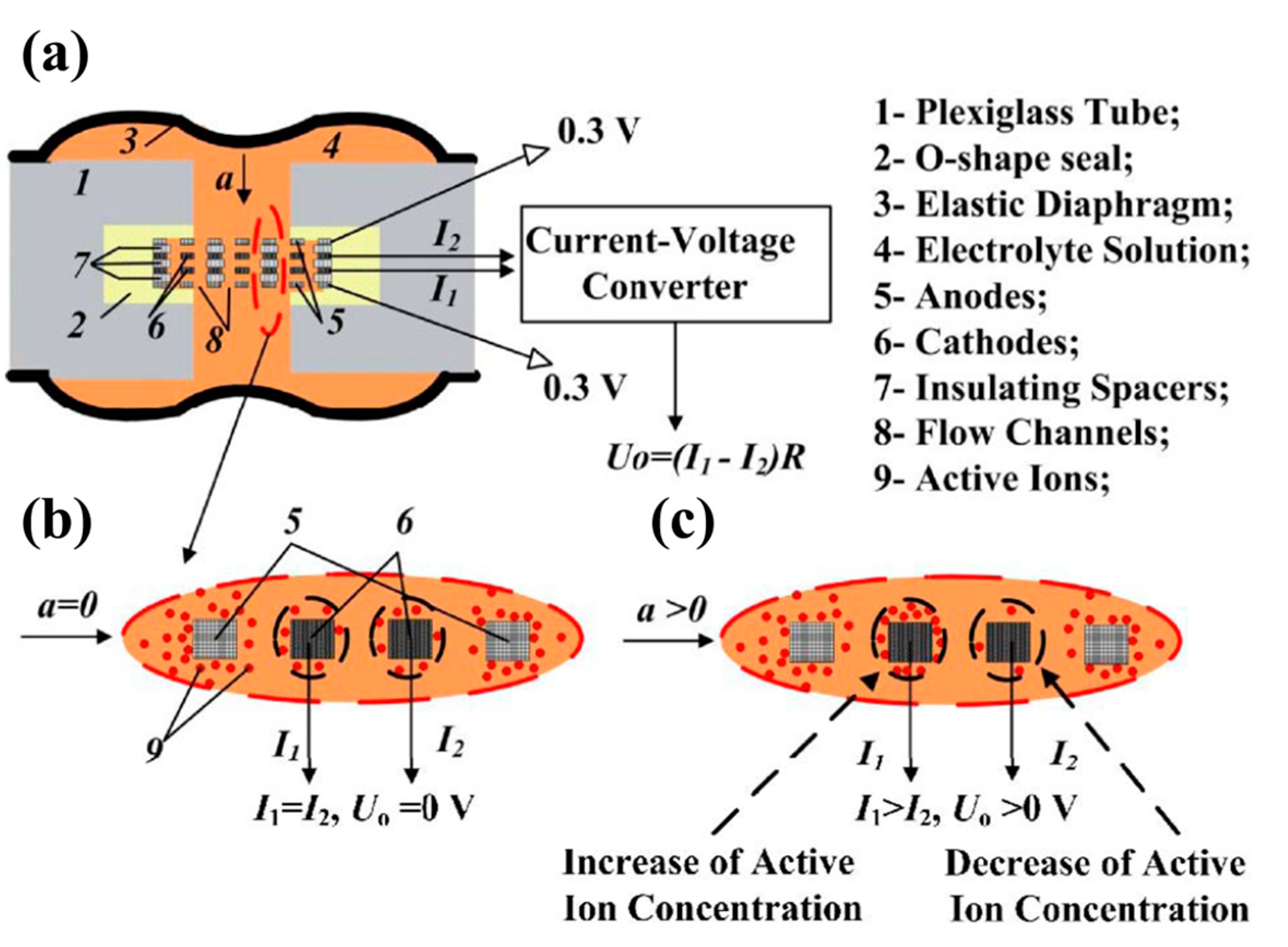
6.2.4. MEMS-Based Electrochemical Accelerometers
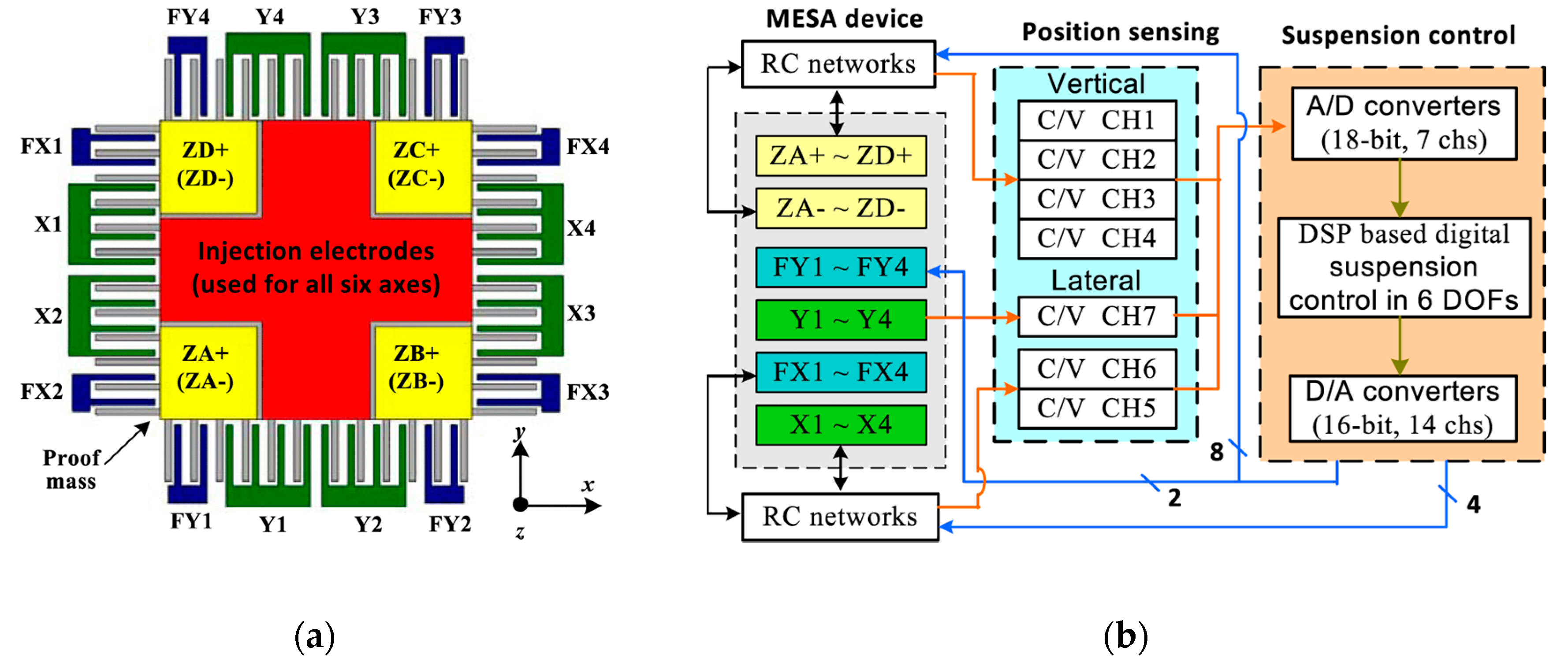
6.2.5. Electrostatically Levitated MEMS Accelerometers
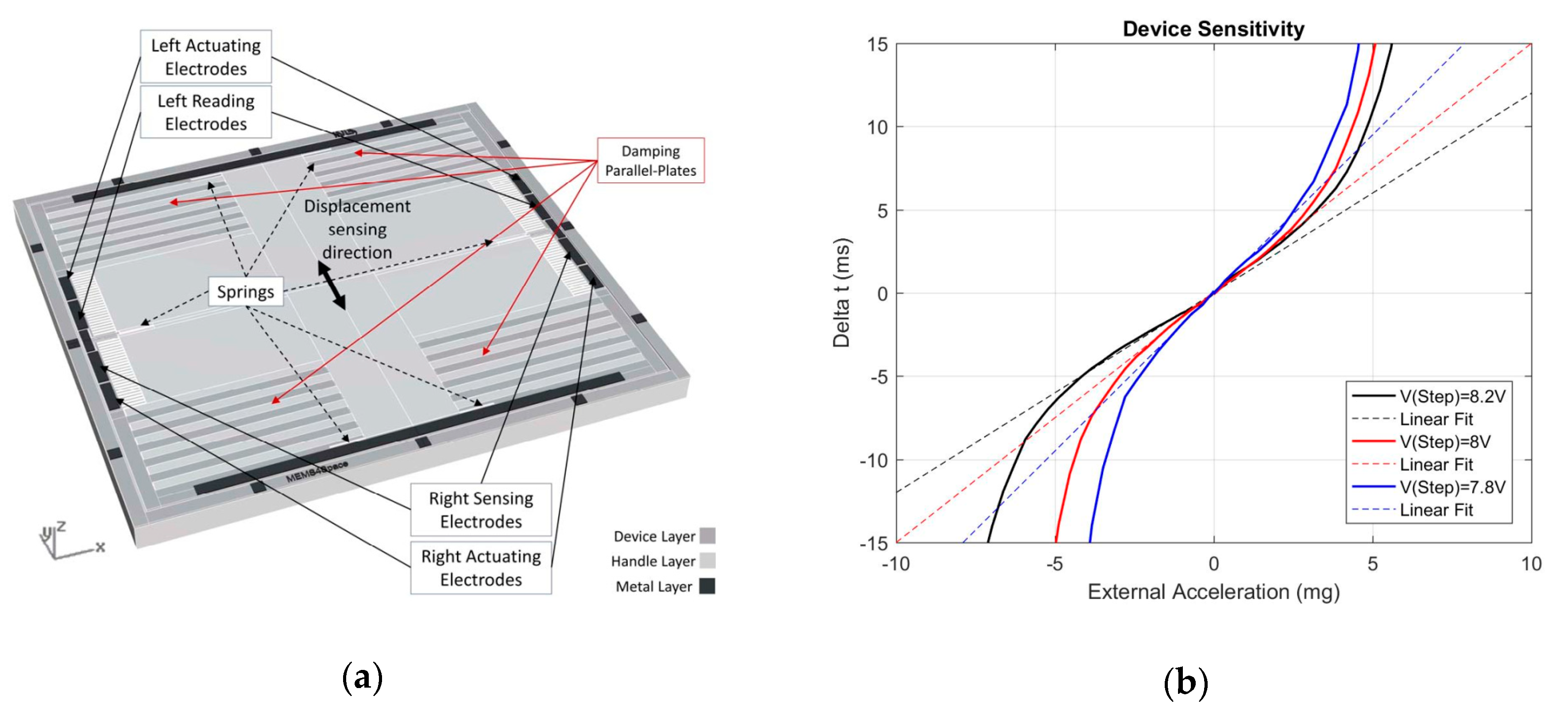
6.2.6. MEMS Accelerometer Using Time Transduction
7. Discussion
8. Conclusions
Funding
Conflicts of Interest
References
- Beaussier, J.; Mainguy, A.; Olivero, A.; Rolland, R. In orbit performance of the CACTUS accelerometer. Acta Astronaut. 1977, 4, 1085–1102. [Google Scholar] [CrossRef]
- Toubul, P. CHAMP, GRACE, GOCE instruments and beyond Geodesy for Planet Earth. In Proceedings of the 2009 IAG Symposium, Buenos Aires, Argentina, 31 August–4 September 2009; pp. 215–221. [Google Scholar]
- Middelhoek, S. Celebration of the tenth transducers conference. Sens. Actuators A Phys. 2000, 82, 2–23. [Google Scholar] [CrossRef]
- Roylance, L.; Angell, J. A batch-fabricated silicon accelerometer. IEEE Trans. Electron Devices 1979, 26, 1911–1917. [Google Scholar] [CrossRef]
- Eloy, J.; Mounier, E.; Roussel, P. Status of the Inertial MEMS-based Sensors in the Automotive. In Advanced Microsystems for Automotive Applications 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 43–48. [Google Scholar]
- Chen, W.-Y.; Wang, M.; Wu, Z.-S. Augmented reality game control of handy devices using a triaxial accelerometer and an electronic compass. Sens. Mater. 2017, 29, 727–739. [Google Scholar]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef] [Green Version]
- Narasimhan, V.; Li, H.; Jianmin, M. Micromachined high-g accelerometers: A review. J. Micromech. Microeng. 2015, 25, 033001. [Google Scholar] [CrossRef]
- Aaltonen, L.; Rahikkala, P.; Saukoski, M.; Halonen, K. High-resolution continuous-time interface for micromachined capacitive accelerometer. Int. J. Circuit Theory Appl. 2009, 37, 333–349. [Google Scholar] [CrossRef]
- Aaltonen, L.; Halonen, K. Continuous-time interface for a micromachined capacitive accelerometer with NEA of 4 μg and bandwidth of 300 Hz. Sens. Actuators A Phys. 2009, 154, 46–56. [Google Scholar] [CrossRef]
- Xu, H.; Liu, X.; Yin, L. A Closed-Loop ΣΔ Interface for a High-Q Micromechanical Capacitive Accelerometer With 200 ng/√Hz Input Noise Density. IEEE J. Solid-State Circuits 2015, 50, 2101–2112. [Google Scholar] [CrossRef]
- Wu, J.; Carley, L. Electromechanical/spl Delta//spl Sigma/modulation with high-Q micromechanical accelerometers and pulse density modulated force feedback. IEEE Trans. Circuits Syst. I Regul. Pap. 2006, 53, 274–287. [Google Scholar]
- Boom, B.A.; Bertolini, A.; Hennes, E.; Brookhuis, R.A.; Wiegerink, R.J.; Van den Brand, J.; Beker, M.; Oner, A.; Van Wees, D. Nano-G accelerometer using geometric anti-springs. In Proceedings of the IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 33–36. [Google Scholar]
- Accadia, T.; Acernese, F.; Alshourbagy, M.; Amico, P.; Antonucci, F.; Aoudia, S.; Arnaud, N.; Arnault, C.; Arun, K.G.; Astone, P.; et al. Virgo: A laser interferometer to detect gravitational waves. J. Instrum. 2012, 7, P03012. [Google Scholar] [CrossRef]
- Bertolini, A.; Cella, G.; DeSalvo, R.; Sannibale, V. Seismic noise filters, vertical resonance frequency reduction with geometric anti-springs: A feasibility study. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 1999, 435, 475–483. [Google Scholar] [CrossRef]
- Kamp, P. Towards An Ultra Sensitive Seismic Accelerometer. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2016. [Google Scholar]
- Middlemiss, R.; Samarelli, A.; Paul, D.J.; Hough, J.; Rowan, S.; Hammond, G. Measurement of the Earth tides with a MEMS gravimeter. Nature 2016, 531, 614–617. [Google Scholar] [CrossRef] [Green Version]
- Prasad, A.; Bramsiepc, S.; Middlemiss, R.; Hough, J.; Rowan, S.; Hammond, G.; Paul, D. A Portable MEMS Gravimeter for the Detection of the Earth Tides. In Proceedings of the IEEE Sensors 2018, New Delhi, India, 28–31 October 2018; pp. 1–3. [Google Scholar]
- Middlemiss, R.; Bramsiepe, S.; Douglas, R.; Hough, J.; Paul, D.; Rowan, S.; Hammond, G. Field tests of a portable MEMS gravimeter. Sensors 2017, 17, 2571. [Google Scholar] [CrossRef] [Green Version]
- Middlemiss, R.; Bramsiepe, S.G.; Douglas, R.; Hild, S.; Hough, J.; Paul, D.J.; Samarelli, A.; Rowan, S.; Hammond, G. Microelectromechanical system gravimeters as a new tool for gravity imaging. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2018, 376, 20170291. [Google Scholar] [CrossRef] [PubMed]
- El Mansouri, B.; Middelburg, L.M.; Poelma, R.H.; Zhang, G.Q.; Van Zeijl, H.W.; Wei, J.; Jiang, H.; Vogel, J.; Van Driel, W.D. High-resolution MEMS inertial sensor combining large-displacement buckling behaviour with integrated capacitive readout. Microsyst. Nanoeng. 2019, 5, 1–14. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, X.; Ding, Y.; Jiang, Z.; Ren, J. A low noise capacitive MEMS accelerometer with anti-spring structure. Sens. Actuators A Phys. 2019, 296, 79–86. [Google Scholar] [CrossRef]
- Tang, S.; Liu, H.; Yan, S.; Xu, X.; Wu, W.; Tu, L.C. A MEMS Gravimeter Qualified for Earth Tides Measurement. In Proceedings of the 20th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Berlin, Germany, 23–27 June 2019; pp. 499–502. [Google Scholar]
- Tang, S.; Liu, H.; Yan, S.; Xu, X.; Wu, W.; Fan, J.; Liu, J.; Hu, C.; Tu, L. A high-sensitivity MEMS gravimeter with a large dynamic range. Microsyst. Nanoeng. 2019, 5, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, Y.; Tai, Y.-C. Micromachined High-Aspect-Ratio Parylene Spring and Its Application to Low-Frequency Accelerometers. J. Microelectromech. Syst. 2006, 15, 1364–1370. [Google Scholar] [CrossRef]
- Si-WARE. Available online: https://www.si-ware.com/sensors-mems/ (accessed on 15 May 2020).
- Pike, W.; Standley, I.; Karl, W.; Kumar, S.; Stemple, T.; Vijendran, S.; Hopf, T. Design, fabrication and testing of a micromachined seismometer with NANO-G resolution. In Proceedings of the 15th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Denver, CO, USA, 21–25 June 2009; pp. 668–671. [Google Scholar]
- Pike, W.; Kumar, S. Improved design of micromachined lateral suspensions using intermediate frames. J. Micromech. Microeng. 2007, 17, 1680. [Google Scholar] [CrossRef]
- Pike, W.; Delahunty, A.; Mukherjee, A.; Dou, G.; Liu, H.; Calcutt, S.; Standley, I. A self-levelling nano-g silicon seismometer. In Proceedings of the IEEE Sensors 2014, Valencia, Spain, 2–5 November 2014; pp. 1599–1602. [Google Scholar]
- Liu, H.; Pike, W. A silicon/solder bilayer thermal actuator for compensating thermal drift of silicon suspensions. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 916–919. [Google Scholar]
- Pike, W.; Calcutt, S.; Standley, I.; Mukherjee, A.; Temple, J.; Warren, T.; Charalambous, C.; Liu, H.; Stott, A.; McClean, J. A silicon seismic package (SSP) for planetary geophysics. In Proceedings of the 47th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 21–25 March 2016; p. 2081. [Google Scholar]
- Pike, W.; Standley, I.; Calcutt, S.; Mukherjee, A. A broad-band silicon microseismometer with 0.25 NG/rtHz performance. In Proceedings of the 31st IEEE International Conference on MEMS, Belfast, Northern Ireland, 21–25 January 2018. [Google Scholar]
- Liua, H.; Pike, W.; Charalambous, C.; Stott, A.E. Passive Method for Reducing Temperature Sensitivity of a Microelectromechanical Seismic Accelerometer for Marsquake Monitoring Below 1 Nano-g. Phys. Rev. Appl. 2019, 12, 064057. [Google Scholar] [CrossRef]
- Wu, W.; Zheng, P.; Liu, J.; Li, Z.; Fan, J.; Liua, H.; Tu, L. High-Sensitivity Encoder-Like Micro Area-Changed Capacitive Transducer for a Nano-g Micro Accelerometer. Sensors 2017, 17, 2158. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wu, W.J.; Zheng, P.P.; Liu, J.Q.; Fan, J.; Tu, L.C. Novel Capacitive Sensing System Design of a Microelectromechanical Systems Accelerometer for Gravity Measurement Applications. Micromachines 2016, 7, 167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, J.; Zhu, T.; Wu, W.J.; Tang, S.H.; Liu, J.Q.; Tu, L.C. Low Temperature Photosensitive Polyimide Based Insulating Layer Formation for Microelectromechanical Systems Applications. J. Electron. Mater. 2015, 44, 4891–4897. [Google Scholar] [CrossRef]
- Wu, W.; Zhu, T.; Liu, J.; Fan, J.; Tu, L. Polyimide-Damage-Free, CMOS-Compatible Removal of Polymer Residues from Deep Reactive Ion Etching Passivation. J. Electron. Mater. 2015, 44, 991–998. [Google Scholar] [CrossRef]
- Wu, W.J.; Liu, D.; Qiu, W.; Liua, H.; Hu, F.; Fan, J.; Hu, C.; Tu, L.C. A precise spacing-control method in MEMS packaging for capacitive accelerometer applications. J. Micromech. Microeng. 2018, 28, 125016. [Google Scholar] [CrossRef]
- Wu, W.J.; Liu, J.; Fan, J.; Peng, D.; Liua, H.; Tu, L.C. A nano-g micromachined seismic sensor for levelling-free measurements. Sens. Actuators A Phys. 2018, 280, 238–244. [Google Scholar] [CrossRef]
- Kim, M.; Moon, W.; Yoon, E.; Lee, K.-R. A new capacitive displacement sensor with high accuracy and long-range. Sens. Actuators A Phys. 2006, 130, 135–141. [Google Scholar] [CrossRef]
- Weast, R.C.; Astle, M.J.; Beyer, W.H. CRC Handbook of Chemistry and Physics; CRC Press: Boca Raton, FL, USA, 1988. [Google Scholar]
- Yamane, D.; Konishi, T.; Toshiyoshi, H.; Masu, K.; Machida, K. A MEMS inertia sensor with Brownian noise of below 50 nG/√ Hz by multi-layer metal technology. In Proceedings of the IEEE 3rd International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 2–5 February 2016; pp. 148–149. [Google Scholar]
- Edalatfar, F.; Yaghootkar, B.; Qureshi, A.Q.A.; Azimi, S.; Bahreyni, B. Design, fabrication and characterization of a high performance MEMS accelerometer. In Proceedings of the IEEE Sensors 2016, Orlando, FL, USA, 30 October–2 November 2016; pp. 1–3. [Google Scholar]
- Edalafar, F.; Azimi, S.; Qureshi, A.Q.A.; Yaghootkar, B.; Keast, A.; Friedrich, W.; Leung, A.M.; Bahreyni, B.; Edalatfar, F. A Wideband, Low-Noise Accelerometer for Sonar Wave Detection. IEEE Sens. J. 2017, 18, 508–516. [Google Scholar] [CrossRef]
- Yazdi, N.; Najafi, K. An all-silicon single-wafer micro-g accelerometer with a combined surface and bulk micromachining process. J. Microelectromech. Syst. 2000, 9, 544–550. [Google Scholar] [CrossRef] [Green Version]
- Fougerat, A.; Guerineau, L. Ultra-low-noise MEMS accelerometer for Seismology. In Proceedings of the 20th EGU General Assembly, Vienna, Austria, 4–13 April 2018; p. 7188. [Google Scholar]
- Walmsley, R.G.; Hopcroft, M.A.; Hartwell, P.G.; Corrigan, G.; Milligan, D. Three-phase capacitive position sensing. In Proceedings of the IEEE Sensors 2010, Waikoloa, HI, USA, 1–4 November 2010; pp. 2658–2661. [Google Scholar]
- Colibrys. Available online: https://www.colibrys.com/ (accessed on 15 May 2020).
- Kinemetrics. Available online: https://kinemetrics.com/products/accelerographs-and-accelerometers/ (accessed on 15 May 2020).
- Ref Tek. Available online: https://www.reftek.com/category/products/seismic-sensors/ (accessed on 15 May 2020).
- Sercel. Available online: http://www.sercel.com/products/Pages/DSU1-508.aspx (accessed on 15 May 2020).
- Laine, J.; Mougenot, D. A high-sensitivity MEMS-based accelerometer. Lead. Edge 2014, 33, 1234–1242. [Google Scholar] [CrossRef] [Green Version]
- INOVA. Available online: https://www.inovageo.com/products (accessed on 15 May 2020).
- Honeywell. Available online: https://aerospace.honeywell.com/en/products/navigation-and-sensors/accelerometers (accessed on 15 May 2020).
- Utz, A.; Walk, C.; Stanitzki, A.; Mokhtari, M.; Kraft, M.; Kokozinski, R. A High-Precision and High-Bandwidth MEMS-Based Capacitive Accelerometer. IEEE Sens. J. 2018, 18, 6533–6539. [Google Scholar] [CrossRef]
- Kamada, Y.; Isobe, A.; Oshima, T.; Furubayashi, Y.; Ido, T.; Sekiguchi, T. Capacitive MEMS Accelerometer With Perforated and Electrically Separated Mass Structure for Low Noise and Low Power. J. Microelectromech. Syst. 2019, 28, 401–408. [Google Scholar] [CrossRef]
- Furubayashi, Y.; Oshima, T.; Yamawaki, T.; Watanabe, K.; Mori, K.; Mori, N.; Matsumoto, A.; Kazama, H.; Kamada, Y.; Isobe, A. 10.2 A 22ng/√ Hz 17mW MEMS Accelerometer with Digital Noise-Reduction Techniques. In Proceedings of the 2019 IEEE International Solid-State Circuits Conference-(ISSCC), San Francisco, CA, USA, 17–21 February 2019; pp. 182–184. [Google Scholar]
- Isobe, A.; Kamada, Y.; Oshima, T.; Furubayashi, Y.; Sakuma, N.; Takubo, C.; Tainaka, Y.; Watanabe, K.; Sekiguchi, T. Design of Perforated Membrane for Low-Noise Capacitive MEMS Accelerometers. In Proceedings of the IEEE Sensors 2018, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar]
- Abdolvand, R.; Ayazi, F. An advanced reactive ion etching process for very high aspect-ratio sub-micron wide trenches in silicon. Sens. Actuators A Phys. 2008, 144, 109–116. [Google Scholar] [CrossRef]
- Tan, Y.; Zhou, R.; Zhang, H.; Lu, G.; Li, Z. Modeling and simulation of the lag effect in a deep reactive ion etching process. J. Micromech. Microeng. 2006, 16, 2570–2575. [Google Scholar] [CrossRef]
- Ayazi, F.; Najafi, K. High aspect-ratio polysilicon micromachining technology. Sens. Actuators A Phys. 2000, 87, 46–51. [Google Scholar] [CrossRef]
- Abdolvand, R.; Amini, B.V.; Ayazi, F. Sub-Micro-Gravity In-Plane Accelerometers With Reduced Capacitive Gaps and Extra Seismic Mass. J. Microelectromech. Syst. 2007, 16, 1036–1043. [Google Scholar] [CrossRef]
- Hessel, A.; Oliner, A.A. A New Theory of Wood’s Anomalies on Optical Gratings. Appl. Opt. 1965, 4, 1275. [Google Scholar] [CrossRef]
- Wang, C.; Lu, Q.; Bai, J.; Wang, K. Tolerance analysis and optimization of a lateral deformable NEMS zeroth-order gratings. Opt. Commun. 2015, 355, 356–366. [Google Scholar] [CrossRef]
- Wang, C.; Lu, Q.; Bai, J.; Yang, G.; Wang, K.; Liu, N.; Yang, Y. Highly sensitive lateral deformable optical MEMS displacement sensor: Anomalous diffraction studied by rigorous coupled-wave analysis. Appl. Opt. 2015, 54, 8935–8943. [Google Scholar] [CrossRef]
- Wang, C.; Bai, J.; Wang, K. Tolerance analysis of the pulse signal of a novel lateral deformable optical NEMS grating transducer. In Proceedings of the Nanoengineering: Fabrication, Properties, Optics, and Devices XII, Sand, San Diego, CA, USA, 15–17 August 2015; p. 95560G. [Google Scholar]
- Carr, D.W.; Sullivan, J.P.; Friedmann, T.A. Laterally deformable nanomechanical zeroth-order gratings: Anomalous diffraction studied by rigorous coupled-wave analysis. Opt. Lett. 2003, 28, 1636–1638. [Google Scholar] [CrossRef] [PubMed]
- Carr, D.W.; Keeler, B.E.; Sullivan, J.P.; Friedmann, T.A.; Wendt, J.R. Measurement of a laterally deformable optical MEMS grating transducer. In Proceedings of the MOEMS and Miniaturized Systems IV, San Jose, CA, USA, 27–28 January 2004; pp. 56–64. [Google Scholar]
- Keeler, B.E.; Bogart, G.R.; Carr, D.W. Laterally deformable optical NEMS grating transducers for inertial sensing applications. In Proceedings of the Nanofabrication: Technologies, Devices, and Applications 2005, Philadelphia, PA, USA, 19–22 October 2004; pp. 306–313. [Google Scholar]
- Keeler, B.E.N.; Carr, D.W.; Sullivan, J.P.; Friedmann, T.A.; Wendt, J.R. Experimental demonstration of a laterally deformable optical nanoelectromechanical system grating transducer. Opt. Lett. 2004, 29, 1182–1184. [Google Scholar] [CrossRef] [PubMed]
- Krishnamoorthy, U.; Olsson, R.; Bogart, G.; Baker, M.; Carr, D.; Swiler, T.; Clews, P. In-plane MEMS-based nano-g accelerometer with sub-wavelength optical resonant sensor. Sens. Actuators A Phys. 2008, 145, 283–290. [Google Scholar] [CrossRef]
- Hall, N.A.; Bicen, B.; Jeelani, M.K.; Lee, W.; Qureshi, S.; Degertekin, F.L.; Okandan, M. Micromachined microphones with diffraction-based optical displacement detection. J. Acoust. Soc. Am. 2005, 118, 3000–3009. [Google Scholar] [CrossRef]
- Hall, N.A.; Okandan, M.; Littrell, R.; Serkland, D.K.; Keeler, G.A.; Peterson, K.; Bicen, B.; Garcia, C.T.; Degertekin, F.L. Micromachined Accelerometers With Optical Interferometric Read-Out and Integrated Electrostatic Actuation. J. Microelectromech. Syst. 2008, 17, 37–44. [Google Scholar] [CrossRef] [Green Version]
- Silicon Audio. Available online: http://www.siaudio.com/ (accessed on 15 May 2020).
- Garcia, C.T.; Onaran, G.; Avenson, B.; Yocom, B.A.; Hall, N.A. Micro-seismometers via advanced meso-scale fabrication. In Proceedings of the 2011 Monitoring Research Review: Ground-Based Nuclear Explosion Monitoring Technologies, Los Alamos, NM, USA, 13–15 September 2011. [Google Scholar]
- Williams, R.P.; Hall, N.A.; Avenson, B.D. Grating-Based Acceleration Sensors with Optical Interferometric Readout and Closed-Loop Control. In Proceedings of the 20th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Berlin, Germany, 23–27 June 2019; pp. 507–510. [Google Scholar]
- Lu, Q.; Bai, J.; Wang, K.; He, S. Design, Optimization, and Realization of a High-Performance MOEMS Accelerometer From a Double-Device-Layer SOI Wafer. J. Microelectromech. Syst. 2017, 26, 859–869. [Google Scholar] [CrossRef]
- Lu, Q.; Wang, C.; Bai, J.; Wang, K.; Lian, W.; Lou, S.; Jiao, X.; Yang, G. Subnanometer resolution displacement sensor based on a grating interferometric cavity with intensity compensation and phase modulation. Appl. Opt. 2015, 54, 4188. [Google Scholar] [CrossRef]
- Lu, Q.; Wang, C.; Bai, J.; Lou, S.; Jiao, X.; Han, D.; Yang, G.; Liu, N. Minimizing cross-axis sensitivity in grating-based optomechanical accelerometers. Opt. Express 2016, 24, 9094. [Google Scholar] [CrossRef]
- Lu, Q.; Bai, J.; Wang, K.; Chen, P.; Fang, W.; Wang, C. Single Chip-Based Nano-Optomechanical Accelerometer Based on Subwavelength Grating Pair and Rotated Serpentine Springs. Sensors 2018, 18, 2036. [Google Scholar] [CrossRef] [Green Version]
- Cervantes, F.G.; Kumanchik, L.; Pratt, J.; Taylor, J.M. High sensitivity optomechanical reference accelerometer over 10 kHz. Appl. Phys. Lett. 2014, 104, 221111. [Google Scholar] [CrossRef] [Green Version]
- Eklund, E.J.; Shkel, A.M. Factors affecting the performance of micromachined sensors based on Fabry–Perot interferometry. J. Micromech. Microeng. 2005, 15, 1770–1776. [Google Scholar] [CrossRef]
- Perez, M.; Shkel, A.M. Design and Demonstration of a Bulk Micromachined Fabry–PÉrot μg-Resolution Accelerometer. IEEE Sens. J. 2007, 7, 1653–1662. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, S.; Li, Y.; Xie, B.; Chen, D.; Wang, J.; Chen, J. A High-sensitivity, Small-size Resonant Pressure Microsensor Based on Optimized Resonator-diaphragm Structure. In Proceedings of the 2019 IEEE 14th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Bangkok, Thailand, 11–14 April 2019; pp. 488–491. [Google Scholar]
- Bao, Y.; Cervantes, F.G.; Balijepalli, A.; Lawall, J.R.; Taylor, J.M.; LeBrun, T.W.; Gorman, J.J. An optomechanical accelerometer with a high-finesse hemispherical optical cavity. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016; pp. 105–108. [Google Scholar]
- Zhao, M.; Jiang, K.; Bai, H.; Wang, H.; Wei, X. A MEMS based Fabry–Pérot accelerometer with high resolution. Microsyst. Technol. 2020, 26, 1961–1969. [Google Scholar] [CrossRef]
- Fourguette, D.; Ötügen, V.; Larocque, L.M.; Ritter, G.A.; Ioppolo, T.; Hart, D. Optical mems-based seismometer. In Proceedings of the 2011 Monitoring Research Review: Ground-Based Nuclear Explosion Monitoring Technologies, Portsmouth, Virginia, 23–25 September 2008. [Google Scholar]
- Fourquette, D.; Otugen, V.; Larocque, L.M.; Ritter, G.A.; Meeusen, J.J.; Ioppolo, T. Optical MEMS-Based Seismometer WhiGS. In Proceedings of the 30th Monitoring Research Review: Ground-Based Nuclear Explosion Monitoring, Portsmouth, WV, USA, 23–25 September 2008. [Google Scholar]
- Li, T.; Tan, Y.; Zhou, Z. A fiber Bragg grating sensing-based micro-vibration sensor and its application. Sensors 2016, 16, 547. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duo, Y.; Xiangge, H.; Fei, L.; Lijuan, G.; Zhang, M.; Xiaokang, Q.; Han, Y. Self-suppression of common-mode noises of the different fiber optic interferometric accelerometers. Opt. Express 2018, 26, 15384–15397. [Google Scholar] [CrossRef]
- Manalis, S.R.; Minne, S.C.; Atalar, A.; Quate, C.F. Interdigital cantilevers for atomic force microscopy. Appl. Phys. Lett. 1996, 69, 3944–3946. [Google Scholar] [CrossRef]
- Loh, N.C.; Schmidt, M.A.; Manalis, S.R. Sub-10 cm/sup 3/interferometric accelerometer with nano-g resolution. J. Microelectromech. Syst. 2002, 11, 182–187. [Google Scholar] [CrossRef]
- Jaksic, Z.; Radulovic, K.; Tanaskovic, D. MEMS accelerometer with all-optical readout based on twin-defect photonic crystal waveguide. In Proceedings of the 24th International Conference on Microelectronics; Nis, Serbia, 16–19 May 2004, pp. 231–234.
- Krause, A.G.; Winger, M.; Blasius, T.D.; Lin, Q.; Painter, O. A high-resolution microchip optomechanical accelerometer. Nat. Photon. 2012, 6, 768–772. [Google Scholar] [CrossRef] [Green Version]
- Eichenfield, M.; Camacho, R.; Chan, J.; Vahala, K.J.; Painter, O. A picogram- and nanometre-scale photonic-crystal optomechanical cavity. Nature 2009, 459, 550–555. [Google Scholar] [CrossRef] [Green Version]
- Flores, J.G.F.; Huang, Y.; Li, Y.; Wang, D.; Goldberg, N.; Zheng, J.; Yu, M.; Lu, M.; Kutzer, M.; Rogers, D. A CMOS-compatible oscillation-mode optomechanical DC accelerometer at 730-ng/Hz1/2 resolution. In Proceedings of the 29th IEEE International Conference on MEMS, Shanghai, China, 24–28 January 2016; pp. 125–127. [Google Scholar]
- Gao, J.; McMillan, J.F.; Wu, M.-C.; Zheng, J.; Assefa, S.; Wong, C.W. Demonstration of an air-slot mode-gap confined photonic crystal slab nanocavity with ultrasmall mode volumes. Appl. Phys. Lett. 2010, 96, 51123. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zheng, J.; Gao, J.; Shu, J.; Aras, M.S.; Wong, C.W. Design of dispersive optomechanical coupling and cooling in ultrahigh-Q/V slot-type photonic crystal cavities. Opt. Express 2010, 18, 23844–23856. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Davies, E.; George, D.S.; Gower, M.C.; Holmes, A.S. MEMS Fabry–Pérot optical accelerometer employing mechanical amplification via a V-beam structure. Sens. Actuators A Phys. 2014, 215, 22–29. [Google Scholar] [CrossRef]
- Zang, J.; Li, C.; Xu, M.; Shi, M. Efficacy of induction chemotherapy plusÃ, concurrent chemoradiotherapy for different histologicalÃ, typesÃ, of advancedÃ, nasopharyngeal carcinomaÃ, in NorthwestÃ, China. Int. J. Radiat. Oncol. 2017, 99, E385. [Google Scholar] [CrossRef]
- Su, S.X.-P.; Yang, H.S. Analytical modeling and FEM Simulations of single-stage microleverage mechanism. Int. J. Mech. Sci. 2002, 44, 2217–2238. [Google Scholar] [CrossRef]
- Pandit, M.; Zhao, C.; Sobreviela, G.; Mustafazade, A.; Zou, X.; Seshia, A.A. An ultra-high resolution resonant mems accelerometer. In Proceedings of the 32rd IEEE International Conference on MEMS, Coex, Seoul, Korea, 27–31 January 2019. [Google Scholar]
- Zhao, C.; Pandit, M.; Sobreviela, G.; Steinmann, P.; Mustafazade, A.; Zou, X.; Seshia, A. A Resonant MEMS Accelerometer With 56ng Bias Stability and 98ng/Hz 1/2 Noise Floor. J. Microelectromech. Syst. 2019, 28, 324–326. [Google Scholar] [CrossRef]
- Yin, Y.; Fang, Z.; Han, F.; Yan, B.; Dong, J.; Wu, Q. Design and test of a micromachined resonant accelerometer with high scale factor and low noise. Sens. Actuators A Phys. 2017, 268, 52–60. [Google Scholar] [CrossRef]
- Shin, D.D.; Ahn, C.H.; Chen, Y.; Christensen, D.L.; Flader, I.B.; Kenny, T.W. Environmentally robust differential resonant accelerometer in a wafer-scale encapsulation process. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 17–20. [Google Scholar]
- Loret, T.; Hardy, G.; Vallée, C.; Demutrecy, V.; Kerrien, T.; Cochain, S.; Boutoille, D.; Taïbi, R.; Blondeau, R. Navigation grade accelerometer with quartz vibrating beam. In Proceedings of the 2014 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 16–17 September 2014; pp. 1–14. [Google Scholar]
- Le Traon, O.; Janiaud, D.; Guerard, J.; Levy, R.; Masson, S.; Ducloux, O.; Pernice, M.; Taibi, R. The fairy world of quartz vibrating MEMS. In Proceedings of the 2012 European Frequency and Time Forum, Gothenburg, Sweden, 24–26 April 2012; pp. 214–220. [Google Scholar]
- Levy, R.; Bourgeteau, B.; Guerard, J.; Lavenus, P. A high precision quartz crystal mems accelerometer based 2 axis inclinometer. In Proceedings of the 2016 Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS (DTIP), Budapest, Hungary, 30 May–2 June 2016; pp. 1–3. [Google Scholar]
- Spletzer, M.; Raman, A.; Wu, A.Q.; Xu, X.; Reifenberger, R. Ultrasensitive mass sensing using mode localization in coupled microcantilevers. Appl. Phys. Lett. 2006, 88, 254102. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Li, B.; Yuan, W.; Kraft, M.; Chang, H. An Acceleration Sensing Method Based on the Mode Localization of Weakly Coupled Resonators. J. Microelectromech. Syst. 2016, 25, 286–296. [Google Scholar] [CrossRef]
- Pandit, M.; Zhao, C.; Sobreviela, G.; Mustafazade, A.; Zou, X.; Seshia, A.A. A mode-localized MEMS accelerometer with 7μg bias stability. In Proceedings of the 31st IEEE International Conference on MEMS, Belfast, Northern Ireland, 21–25 January 2018; pp. 968–971. [Google Scholar]
- Pandit, M.; Zhao, C.; Sobreviela, G.; Zou, X.; Seshia, A. A High Resolution Differential Mode-Localized MEMS Accelerometer. J. Microelectromech. Syst. 2019, 28, 782–789. [Google Scholar] [CrossRef]
- Zhao, C.; Wood, G.S.; Xie, J.; Chang, H.; Pu, S.H.; Kraft, M. A Three Degree-of-Freedom Weakly Coupled Resonator Sensor With Enhanced Stiffness Sensitivity. J. Microelectromech. Syst. 2015, 25, 38–51. [Google Scholar] [CrossRef]
- Kang, H.; Yang, J.; Zhong, J.; Zhang, H.; Chang, H. A mode-localized accelerometer based on three degree-of-freedom weakly coupled resonator. In Proceedings of the IEEE Sensors 2017, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar]
- Kang, H.; Yang, J.; Chang, H. A Closed-Loop Accelerometer Based on Three Degree-of-Freedom Weakly Coupled Resonator With Self-Elimination of Feedthrough Signal. IEEE Sens. J. 2018, 18, 3960–3967. [Google Scholar] [CrossRef]
- Zhao, C.; Zhou, X.; Pandit, M.; Sobreviela, G.; Du, S.; Zou, X.; Seshia, A. Toward High-Resolution Inertial Sensors Employing Parametric Modulation in Coupled Micromechanical Resonators. Phys. Rev. Appl. 2019, 12, 044005. [Google Scholar] [CrossRef] [Green Version]
- Pandit, M.; Zhao, C.; Sobreviela, G.; Mustafazade, A.; Du, S.; Zou, X.; Seshia, A. Closed-Loop Characterization of Noise and Stability in a Mode-Localized Resonant MEMS Sensor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2018, 66, 170–180. [Google Scholar] [CrossRef]
- Liu, C.-H.; Kenny, T. A high-precision, wide-bandwidth micromachined tunneling accelerometer. J. Microelectromech. Syst. 2001, 10, 425–433. [Google Scholar]
- Levchenko, D.G.; Kuzin, I.P.; Safonov, M.V.; Sychikov, V.N.; Ulomov, I.V.; Kholopov, B.V. Experience in seismic signal recording using broadband electrochemical seismic sensors. Seism. Instrum. 2010, 46, 250–264. [Google Scholar] [CrossRef]
- Huang, H. Molecular Electronic Transducer-Based Seismometer and Accelerometer Fabricated with Micro-Electro-Mechanical Systems Techniques; Arizona State University: Tempe, AZ, USA, 2014. [Google Scholar]
- Liang, M.; Huang, H.; Agafonov, V.; Tang, R.; Han, R.; Yu, H. Molecular electronic transducer based planetary seismometer with new fabrication process. In Proceedings of the 29th IEEE International Conference on MEMS, Shanghai, China, 24–28 January 2016; pp. 986–989. [Google Scholar]
- Deng, T.; Chen, D.; Wang, J.; Chen, J.; He, W. A MEMS Based Electrochemical Vibration Sensor for Seismic Motion Monitoring. J. Microelectromech. Syst. 2013, 23, 92–99. [Google Scholar] [CrossRef]
- Huang, H.; Carande, B.; Tang, R.; Oiler, J.; Zaitsev, D.; Agafonov, V.; Yu, H. A micro seismometer based on molecular electronic transducer technology for planetary exploration. Appl. Phys. Lett. 2013, 102, 193512. [Google Scholar] [CrossRef] [Green Version]
- Deng, T.; Chen, D.; Chen, J.; Sun, Z.; Li, G.; Wang, J. Microelectromechanical Systems-Based Electrochemical Seismic Sensors With Insulating Spacers Integrated Electrodes for Planetary Exploration. IEEE Sens. J. 2015, 16, 650–653. [Google Scholar] [CrossRef]
- Han, F.; Sun, B.; Li, L.; Wu, Q. Performance of a Sensitive Micromachined Accelerometer With an Electrostatically Suspended Proof Mass. IEEE Sens. J. 2014, 15, 209–217. [Google Scholar]
- Houlihan, R.; Kraft, M. Modelling squeeze film effects in a MEMS accelerometer with a levitated proof mass. J. Micromech. Microeng. 2005, 15, 893–902. [Google Scholar] [CrossRef]
- Houlihan, R.; Kraft, M. Modelling of an accelerometer based on a levitated proof mass. J. Micromech. Microeng. 2002, 12, 495–503. [Google Scholar] [CrossRef]
- Gindila, M.V.; Kraft, M.; Houlihan, R.; Redman-White, W. Solid-state electronic interface for a levitated disc accelerometer. In Proceedings of the 18th European Conference on Solid-State Sensors, Rome, Italy, 13–15 September 2004. [Google Scholar]
- Cui, F.; Liu, W.; Chen, W.; Zhang, W.; Wu, X. Design, Fabrication and Levitation Experiments of a Micromachined Electrostatically Suspended Six-Axis Accelerometer. Sensors 2011, 11, 11206–11234. [Google Scholar] [CrossRef] [PubMed]
- Toda, R.; Takeda, N.; Murakoshi, T.; Nakamura, S.; Esashi, M. Electrostatically levitated spherical 3-axis accelerometer. In Proceedings of the 15th IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, USA, 20–24 January 2002; pp. 710–713. [Google Scholar]
- Pakula, L.; French, P. Post-Processing Micromachined Pull-In Accelerometer. In Proceedings of the Transducers 2007–2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007; pp. 1171–1174. [Google Scholar]
- Garcia, I.S.; Moreira, E.E.; Dias, R.A.; Gaspar, J.; Alves, F.S.; Rocha, L.A. Sub-Micron Mems Accelerometer with Handle-Layer Patterning for Damping Enhancement Using Time Transduction. In Proceedings of the 20th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Berlin, Germany, 23–27 June 2019; pp. 2045–2048. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Navigation Grade | Tactical Grade | Consumer Grade |
|---|---|---|---|
| Input range | ±1 g | ±5 g | ±50 g |
| Noise | <50 μg | <100 μg | <50 mg |
| Working Frequency | 100 Hz | 100 Hz | 400 Hz |
| Sensitivity | <100 μg | <200 μg | <50 mg |
| Nonlinearity | <0.05% | <0.1% | <2% |
| Max shock input | >10 g | >20 g | >2000 g |
| Partial axis sensitivity | <0.1% | <0.3% | <5% |
| Company | Product | Noise Floor | Dynamic Range/Full Scale Range | Bandwidth |
|---|---|---|---|---|
| HP | --- | 10 ng/√Hz (at 1–200 Hz) | 120 dB | 1–200 Hz |
| Colibrys | SF1500 | 300 ng/√Hz (at 10–1000 Hz) | 117 dB | 0–1500 Hz |
| SF2005S.A | 800 ng/√Hz (at 10–1000 Hz) | 111 dB | 0–1000 Hz | |
| SF3000 | 300 ng/√Hz (at 10–1000 Hz) | 120 dB | 0–1000 Hz | |
| SI1000 | 700 ng/√Hz (at 0.1–100 Hz) | 108.5 dB | 0–550 Hz | |
| Kinemetrics | EpiSensor ES-T | 60 ng/√Hz | ±0.25 g | 0–200 Hz |
| EpiSensor ES-U2 | 60 ng/√Hz | ±0.25 g | 0–200 Hz | |
| EpiSensor 2 | 3 ng/√Hz (at 1 Hz) | ±0.25 g | 0–>320 Hz | |
| Reftek | 131A | 14 ng/√Hz | ±3 g | 0–500 Hz |
| Trimble 147A | 10 ng/√Hz | ±4 g | 0–150 Hz | |
| Sercel | DSU1-508 | 15 ng/√Hz (at 10–200 Hz) | 128 dB | 0–800 Hz |
| DSU-3 | 41 ng/√Hz (at 10–200 Hz) | 120 dB | 0–800 Hz | |
| INOVA | ACCUSEIS SL11 | 30 ng/√Hz (at 3–400 Hz) | 118 dB | 3–400 Hz |
| VECTORSEIS ML21 | 40 ng/√Hz (at 3–375 Hz) | 118 dB | 3–375 Hz |
| Research Group | Noise Floor | Dynamic Range /Full Scale Range | Resonant Frequency | Type |
|---|---|---|---|---|
| Boom and Kamp et al. [16] | 2 ng/√Hz (at 28.1 Hz) | -- | 3–28.1 Hz | #+^ |
| Middlemiss et al. [18] | 8 ng/√Hz (at 1 Hz) | -- | 2.31 Hz | #+^ |
| Zhang et al. [22] | 51.8 ng/√Hz (at 1 Hz) | -- | 158 Hz | #^ |
| Tang et al. [24] | 8 ng/√Hz (at 1 Hz) | +8 mg | 0.5–3 Hz | #+^ |
| Pike et al. [31] | 0.25 ng/√Hz (at 0.1–10 Hz) | -- | 6 Hz | + |
| Wu et al. [39] | 10–50 ng/√Hz (at 1 Hz) | ±1.4 g | 13.2 Hz | + |
| Edalatfar et al. [44] | 350 ng/√Hz (at 1–5 kHz) | 135 dB | 4500 Hz | + |
| Yazdi and Najafi [45] | 160 ng/√Hz | -- | <1000 Hz | + |
| Aaltonen et al. [9] | 300 ng/√Hz (at 30 Hz) | ±1.5 g | 300 Hz | +^ |
| Xu et al. [11] | 200 ng/√Hz (at 100 Hz) | ±1.2 g | 700 Hz | ^ |
| Utz and Kraft et al. [55] | 216 ng/√Hz (at 30–40 Hz) | ±1.25 g/5 g | 5000 Hz | #- |
| Kamada and Furubayashi et al. [56] | 30 ng/√Hz (at 10–300 Hz) | 116 dB | 300 Hz | #-^ |
| Krishnamoorthy and Carr et al. [71] | 17 ng/√Hz (at 1 Hz) | 140 dB | 36 Hz | +^& |
| Williams and Silicon Audio et al. [74] | 0.5 ng/√Hz (at 10 Hz) | 172 dB | 0.005–1.5 kHz | +& |
| Lu et al. [77] | 185.8 ng/√Hz | -- | 34.5 Hz | +& |
| Fourguette et al. [87] | 10 ng/√Hz | 120 dB | 80 Hz | +& |
| Duo et al. [90] | 312 ng/√Hz (at 100 Hz) | -- | 100 Hz | & |
| Loh et al. [92] | 40 ng/√Hz (at 40 Hz) | 85 dB (at 40 Hz) | 80-1000 Hz | +& |
| Flores et al. [96] | 196 ng/√Hz | -- | 63,300 Hz | & |
| Zou and Seshia [100] | 144 ng/√Hz (at <1–50 Hz) | ±0.05 g | 1–50 Hz | +^& |
| Pandit and Seshia et al. [102] | 17.8 ng/√Hz (at 0.25–4 Hz) | ±1 g | 5 Hz | +^& |
| Zhao and Seshia et al. [103] | 98 ng/√Hz (at 1 Hz) | ±1 g | 5 Hz | +^& |
| Yin et al. [104] | 380 ng/√Hz | ±15 g | 2.7 Hz | +^& |
| Zhao and Seshia et al. [116] | 680 ng/√Hz (at 0.5–3 Hz) | -- | 3 Hz | ^& |
| Abdolvand and Ayazi et al. [62] | 213 ng/√Hz (at 2 Hz) | -- | 200 Hz | +^& |
| Liu and Kenny [118] | 20 ng/√Hz (at 10–1000 Hz) | 90 dB | 5–1500 Hz | +^& |
| Liang, Hua and Agafonov et al. [121] | 17.8 ng/√Hz (at 1.2 Hz) | -- | 1.2 Hz | & |
| Deng et al. [124] | 3.2 ng/√Hz (at 0.02 Hz) | ±0.01 g | 0.2–5 Hz | & |
| EI Mansouri et al. [21] | 17.02 ng/√Hz | -- | 8.7 Hz | #+^- |
| Guzman Cervantes et al. [81] | 10 ng/√Hz | -- | 2000 Hz | & |
| Bao et al. [85] | <1000 ng/√Hz | -- | -- | & |
| Zhao et al. [86] | 42.4 ng/√Hz | -- | 29.3 Hz | & |
| Shin and Kenny et al. [105] | <160 ng/√Hz | -- | -- | +^& |
| HP [46]. | 10 ng/√Hz (at 10–200 Hz) | 120 dB | 1–200 Hz | +^- |
| Safran Colibrys SF1500 [48] | 300 ng/√Hz (at 10–1000 Hz) | ±3 g | 0–1500 Hz | +^- |
| Kinemetrics EpiSensor 2 [49] | 3 ng/√Hz (at 1 Hz) | ±0.25 g | 0–>320 Hz | +- |
| Reftek Trimble 147A [50] | 10 ng/√Hz | ±4 g | 0–150 Hz | +- |
| Sercel DSU1-508 [51] | 15 ng/√Hz (at 10–200 Hz) | 5 g | 0–800 Hz | +^- |
| INOVA ACCUSEIS SL11 [53] | 30 ng/√Hz (at 3–400 Hz) | 118 dB | 3–400 Hz | +- |
| Honeywell QA3000 [54] | <1000 ng/√Hz | ±60 g | >300 Hz | ^-+ |
| Research Group | Noise Floor | Dynamic Range /Full Scale Range | Resonant Frequency | Type |
|---|---|---|---|---|
| Han et al. [125] | 3.0 μg/√Hz (at 0.2–10 Hz) | ±0.0029 g | 0.2–10 Hz | # |
| Suzuki et al. [25] | 45.0 μg/√Hz | -- | 37 Hz | # |
| Krause et al. [94] | 10.0 μg/√Hz (at 5–25 kHz) | 40 dB | >20,000 Hz | & |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Chen, F.; Wang, Y.; Sadeghpour, S.; Wang, C.; Baijot, M.; Esteves, R.; Zhao, C.; Bai, J.; Liu, H.; et al. Micromachined Accelerometers with Sub-µg/√Hz Noise Floor: A Review. Sensors 2020, 20, 4054. https://doi.org/10.3390/s20144054
Wang C, Chen F, Wang Y, Sadeghpour S, Wang C, Baijot M, Esteves R, Zhao C, Bai J, Liu H, et al. Micromachined Accelerometers with Sub-µg/√Hz Noise Floor: A Review. Sensors. 2020; 20(14):4054. https://doi.org/10.3390/s20144054
Chicago/Turabian StyleWang, Chen, Fang Chen, Yuan Wang, Sina Sadeghpour, Chenxi Wang, Mathieu Baijot, Rui Esteves, Chun Zhao, Jian Bai, Huafeng Liu, and et al. 2020. "Micromachined Accelerometers with Sub-µg/√Hz Noise Floor: A Review" Sensors 20, no. 14: 4054. https://doi.org/10.3390/s20144054
APA StyleWang, C., Chen, F., Wang, Y., Sadeghpour, S., Wang, C., Baijot, M., Esteves, R., Zhao, C., Bai, J., Liu, H., & Kraft, M. (2020). Micromachined Accelerometers with Sub-µg/√Hz Noise Floor: A Review. Sensors, 20(14), 4054. https://doi.org/10.3390/s20144054